康复助行机器人仿真设计与分析
2018-05-14 06:46:24乔宇穆煜吕韫琦高学山
兵工学报 2018年4期
乔宇,穆煜,吕韫琦,高学山
(1.北方工业大学 机械与材料工程学院, 北京 100144; 2.北京理工大学 机电学院, 北京 100081)
0 引言
助行机器人是医疗机器人领域的重要分支,其研究囊括了机械设计学、电子学、康复医学、计算机科学、生物力学、机器人学以及工业设计等领域的专业知识。近年来,随着下肢运动功能障碍人士对康复器具需求的增加,助行机器人受到了相关学术界的广泛重视,已成为国际机器人领域的热门研究课题之一[1-4]。
在战争损伤的军队人员康复治疗中,助行机器人正在发挥着越来越重要的作用。战争损伤是军队的主要危险因素,损伤可发生在直接作战或非战争行动中,也可发生在部署期间或其他军事行动和训练中[5]。作战人员最常见的损伤类型为肌肉骨骼损伤(MSIs),2006年在所有的美国陆军人员中,MSIs患者数量超过195万,排在就诊患者的首位,比第2位的精神障碍患者高出2~3倍[6]。在美军服役人员的MSIs中,下肢损伤占总损伤的80%,而脊椎或下腰损伤占MSIs的40%,上肢损伤仅占总损伤的14%[7]. 阿富汗战争中的报告显示,美军在阿富汗部署的15个月中,步兵作战旅损伤的MSIs部位,最常见的机械性下腰痛占MSIs的19.4%,踝扭伤占MSIs的11.6%,膝关节疼痛占MSIs的4.3%,其他损伤占MSIs的64.7%. 损伤部位数据分析结果显示,大部分损伤都涉及到脊椎损伤(30%)和腰椎损伤(占下腰痛的70%)[8]。
针对MSIs,目前行走障碍病人的后期康复手段主要通过行走康复训练来完成。因此,很多医院都专门配有针对此类病人的康复训练科室,康复训练主要分为3种训练方式:双杠支撑训练、医护人员搀扶训练及助行器具训练。其中,双杠支撑训练的优势在于相对安全,缺点在于训练行动范围相对过小会使患者产生厌烦心理。医护人员搀扶训练虽然相对简单安全,但是训练需要一对一的辅助陪护,而有经验的专业医护人员又相对缺乏,据统计,目前在美军各战区进行专业康复训练,至少需要33名物理治疗师和43名作业治疗师[9]。这些因素对于该类患者的康复效果十分不利。因此,当下的康复训练大多需要借助助行器具进行,这样既可以减少人员投入,又可以增加训练中患者移动的自由度。
为了解决目前患者康复训练中存在的医院陪护人员少、训练人工成本高,康复训练活动范围相对固定、患者训练时感到枯燥,传统康复训练中存在一定安全隐患的问题,本文提出了一种新型智能康复助行机器人设计方案,包括机械结构、人机接口、控制系统、驱动系统等。该方案具有可为患者提供伴随行走、安全保护和医学数据采集的功能,达到了功能性与美观性的有机结合,并通过仿真实验验证了助行机器人设计方案的有效性和合理性。
1 助行机器人系统
1.1 助行机器人结构设计
考虑到患者的身体状况,助行机器人需要提供一个稳定的支撑以避免患者在使用过程中由于跌倒等意外而受到伤害。此外,助行机器人还应具有一定的灵活性,使患者在使用过程中能够方便进出机器人。基于上述考虑,为使助行机器人能够同时具有稳定性与灵活性,本文设计了如图1所示的机械结构。
由图1中可见,机器人的结构分为上、中、下3层,机器人上层和中层高度可调节,以满足患者不同的高度需求。上层支撑架前端设有手柄架,手柄架连接传递杆,用以辅助患者运动。机器人中层装有4个一维力传感器,用以检测患者运动趋势。力传感器的分布如图2所示,分别安装于机器人中层的左前端、右前端、左后端和右后端,标记为FL、FR、BL和BR. 底层为移动底盘,前端设有机器人控制箱,电池、伺服驱动器等放置于控制箱内,两个驱动轮设置于底层前端,两个脚轮设置于底层后端。
1.2 助行机器人的运动学与动力学模型与分析
为助行机器人建立如图3所示的坐标系。
在参考坐标系Oxy下,机器人驱动轮的半径为rw,机器人长边的长度记作lr,机器人短边的长度记作2wr,机器人底盘几何中心的速度记作v,可以分解为x、y方向的速度,v=vx+vy,与x轴的夹角记作φ. 机器人左、右驱动轮的速度分别记为vL、vR.
助行机器人的逆运动学方程为
(1)
正运动学方程为
(2)
助行机器人的动力学方程为
(3)
由电机的绝对位置(nL,nR)可以得到机器人的轨迹,nL、nR分别为左、右电机的转速参数,在1个采样周期内助行机器人的轨迹如图4所示。图4中D为机器人移动时右驱动轮相对转动中心的距离,R为机器人移动时左驱动轮相对转动中心的距离。
PL(k)=[xL(k),yL(k)]T、Pw(k)=[xw(k),yw(k)]T、PR(k)=[xR(k),yR(k)]T分别表示机器人左驱动轮、底盘几何中心和右驱动轮在第k个采样周期的坐标,参照图4中各参数的几何关系,可得到助行机器人的相对角度为
(4)
式中:dR(k+1)为机器人右驱动轮在1个采样周期内的相对位移。
最终得到机器人底盘中心的坐标如(5)式所示,由此可获得机器人的运动轨迹。
(5)
式中:xw为底盘中心的x轴绝对坐标;yw为底盘中心的y轴绝对坐标;dw为底盘中心1个采样周期内的相对位移。
2 基于数学模型的助行机器人运动控制
根据人与机器人之间的相互作用力建立数学模型,然后由该数学模型获得机器人的期望运动,从而实现对机器人运动的控制。患者通常使用助行机器人以直行和原地转弯两种基本运动形式进行康复训练,因此需要为其分别建立这两种情况相应的数学模型。
2.1 基于数学模型的直行控制系统
直行时,患者与机器人之间的相互作用力如图5所示。
患者相对于机器人的运动变量是一段位移差值,用Δdy表示。Δdy与拉力之间的数学模型为
(6)
式中:FFL、FFR、FBL、FBR分别表示左前、右前、左后、右后4个一维力传感器在患者行走时对机器人产生的拉力;RFL、RFR、RBL、RBR分别是前、后、左、右4根绳子在患者行走时的实时长度;RFL0、RFR0、RBL0、RBR0分别是4根绳子在初始状态下的长度;RS是4根绳子的原长;kf是绳子的弹性系数。
进而得出Δdy的计算公式:
(7)
式中:
(8)
助行机器人在使用过程中,可能会出现ΔFFL=0、ΔFFR=0的情况,因此可选取左后FBL或者右后FBR一维力传感器的输出作为控制系统输入,由数学模型计算出的Δdy可被视为机器人的期望位移。
由运动学逆解得到左、右两驱动轮的期望转角为
(9)
根据编码器采集的信号计算出驱动轮实际位置ΔθL、ΔθR并作为控制系统的反馈。由于患者总是先于机器人行走,机器人始终在追随患者的行走,快速响应对于助行机器人的运动控制系统格外重要。以驱动轮期望位置和实际位置的差值作为控制系统偏差信号:
(10)
PID控制器结构简单,适合作为助行机器人控制系统的控制器,控制器输出的左、右两驱动轮扭矩分别为
(11)
式中:PL、IL、DL分别为左驱动轮的比例、积分、微分系数;PR、IR、DR分别为右驱动轮的比例、积分、微分系数;S为拉普拉斯算子。
机器人驱动轮的实际位置ΔθL、ΔθR可以由机器人的动力学方程得
(12)

根据运动学正解可以得到机器人的实际位移为
Δdry=(ΔθL+ΔθR)rw/2.
(13)
2.2 基于数学模型的原地转弯控制系统
原地转弯时,患者与机器人之间的相互作用力如图7所示。
此时,患者对机器人的拉力与角度差之间的关系为
(14)
式中:RFL=
角度的改变量γ将作为机器人的期望转角,并根据(15)式进行计算:
(15)
与2.1节同理,构建运动控制系统,系统框图如图8所示。
与直行时控制系统相似,仅在运动学逆解与正解模块上存在差异。
运动学方程逆解:
(16)
运动学方程正解:
(17)
3 机器人智能避障系统
当患者操作机器人行走时,期望理想状态是机器人能够帮助患者而不是完全取代患者。但是由于目标群体存在着不同程度的生理缺陷和认知能力障碍,这就需要提高助行机器人的智能性和安全性,使其能够在患者未能察觉危险时,及时做出躲避措施。
机器人使用超声波传感器组探测障碍物示意图如图9所示。3个超声波传感器L、M和R测得障碍物的距离分别为dL、dM、dR,由此可以得到机器人距离障碍物的最近距离为
(18)
机器人与障碍物的角度为
(19)

机器人模糊避障控制系统是一个双输入、双输出的控制系统,输入是机器人与障碍物的距离和角度,输出是机器人的期望位移和角度。由于输入和输出之间很难建立精确的数学模型,适合采用模糊控制,控制框图如图10所示。采用T-S型模糊控制器,控制器以机器人与障碍物距离和角度作为输入进行模糊化处理,并经过模糊推理、解模糊等一系列过程,从而规划出机器人的期望位移和转角。
选择三角形分布(20)式、降半梯形分布(21)式和升半梯形分布(22)式为隶属度函数:
(20)
(21)
(22)
式中:a、b、c为各隶属度函数的边界参数。
根据经验总结出机器人期望位移和转角的模糊规则如表1和表2所示。

表1 机器人期望位移的模糊规则Tab.1 Fuzzy rules of the desired displacement
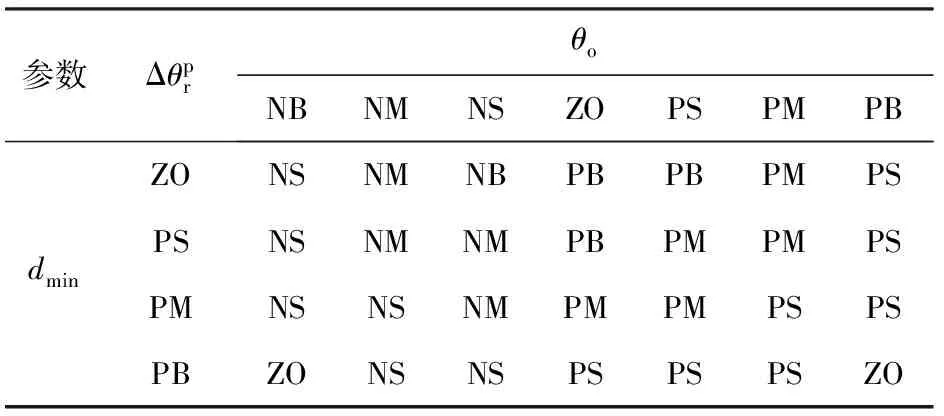
表2 机器人期望转角的模糊规则Tab.2 Fuzzy rules of the desired turning angle
根据模糊规则可以得出模糊输出,由于重心法可以提供比较平滑的清晰输出量,采用重心法将模糊输出清晰化成具体的控制变量。重心法公式为
(23)
式中:vo表示模糊控制器的最终输出控制变量,即转角和位移的控制量;V为机器人速度域。
针对当患者遇到障碍物的情况下,机器人采取共享控制方法确保机器人的正确轨迹,并不至于给患者带来过多不适,这是通过在线调节患者控制权重来实现的。根据超声波传感器的数据,采用模糊算法计算出机器人的期望位移和转角,可以视为机器人的正确轨迹。同时,根据力传感器和角度传感器的输出数据,采用人机接口辨识方法可以确定患者对机器人的期望位移和转角。计算当前状态并将这些数据离散化,采用Sarsa-学习方法计算出患者的控制权重,最终得到共享控制方法规划下的机器人期望位移和转角。
4 外观设计分析
现代医疗设备不仅应具有实际用途、科学合理的结构,还要具备美观的外形。康复助行机器人同样应在满足使用功能的情况下,符合造型设计的审美需求。配合让患者更易于接受的外观造型,可以提升医疗设备的使用率,并调节患者的心理状态。在进行机器人造型设计过程中,将从使用功能和患者的需要两个方面加以考虑。
根据功能需要进行造型设计,此过程集成了大量信息技术、人机交互的相关内容。在机器人功能达到预期效果的基础上,机器人的整体造型设计采用圆润无棱角的设计语言,将各部分结构通过颜色与造型的区分实现简单化、模块化。
机器人主体采用聚氯乙烯塑料,其具有轻质、隔热特点。在机器人与人体接触部分,采用织物类的软材质,从而达到柔软、透气要求,让患者在使用过程中更舒适、更安全。此外,还针对机器人的防护部分使用了可折叠的防护结构,以便运输与存放。基于上述考虑,所设计的助行机器人外观如图11所示。
5 仿真实验与分析
为了证明第2节中控制方法的有效性,本文使用仿真软件MATLAB Simulink对其进行了仿真验证,直行控制系统仿真框图如图12所示。由于患者相对于机器人的运动变量Δdy是随时间变化并且存在加速和减速状态的,仿真参数设置后一维力传感器输出信号也随时间变化,并且相应地也存在加速和减速状态。通过构建基于数学模型的计算模块,以得到Δdy的信号;通过构建运动学反解模块,以得到左、右两轮的期望位置;通过构建两个PID控制器、机器人动力学模块以及运动学正解模块,以得到Δdry的信号。调整合适的PID控制器参数,观察dy示波器信号的拟合程度,以达到理想的控制效果。原地转弯的控制仿真框图与直行时类似,只是数学模型计算模块、运动学正解、运动学逆解模块和动力学模块不同。
基于数学模型控制系统(直行与原地转弯)的仿真实验曲线如图13~图16所示。由仿真实验曲线可以得出:
1)图13中患者位移Δdy的曲线和机器人位移Δdry的曲线无论加速过程或是减速过程都拟合在一起,图14中Δdy和Δdry的差值可以更清晰地反映出在患者行走过程中机器人与患者的差值在毫米量级内,完全可以满足目标群体的需求。
2)图15中患者转角γ的曲线和机器人转角Δθr的曲线在加速过程或减速过程也都拟合在一起,图16中γ和Δθr的差值可以更清晰地反映出在患者转角过程中机器人与患者的差值在1°内,完全满足目标群体的需求。
为了验证上述系统的稳定性,在仿真实验中,左、右轮PID控制器的参数通过两种情况进行了验证:
1)当左轮PID控制器参数为PL=1 000,IL=0,DL=1,右轮PID控制器参数为PR=1 000,IR=0,DR=1时,系统稳定。
2)当左轮PID控制器参数为PL=700,IL=0,DL=10,右轮PID控制器参数为RP=700,IR=0,DR=10时,系统稳定。
6 结论
本文根据下肢残障者康复训练要求,利用仿真分析的方法设计了一种康复助行机器人,得到如下结论:1)基于对助行机器人运动学与动力学分析,设计了具有稳定性与灵活性的结构;2)设计了基于数学模型的控制系统,可满足机器人直行与原地转弯的要求;3)在考虑人机工程的基础上,为助行机器人设计了兼具良好功能性与美观性的外观造型。仿真实验结果证明了本文所设计控制方法的有效性与可行性。
参考文献(References)
[1] 李庆玲,孔民秀,杜志江,等.上肢康复机械臂交互式康复训练控制策略[J].机械工程学报,2008,44(9): 169-174.
LI Qing-ling,KONG Min-xiu,DU Zhi-jiang,et al. Interactive rehabilitation exercise control strategy for 5-DOF upper limb rehabilitation arm[J].Chinese Journal of Mechanical Engineering,2008,44(9):169-174. (in Chinese)
[2] 李军强,王娟,赵海文.下肢康复训练机器人关键技术分析[J].机械设计与制造,2013(9):220-223.
LI Jun-qiang,WANG Juan,ZHAO Hai-wen. Critical technologies of lower limb rehabilitation training robot [J].Machinery Design and Manufacture,2013(9):220-223. (in Chinese)
[3] 方彬,沈林勇,李荫湘,等.步行康复训练机器人协调控制的研究[J].机电工程,2010,27(5):106-110.
FANG Bin,SHEN Lin-yong,LI Yin-xiang,et al. Research of coordination control for gait rehabilitation training robot[J]. Journal of Mechanical & Electrical Engineering, 2010, 27(5):106-110. (in Chinese)
[4] 刘燕平, 罗佳, 杨京辉. 足下垂助行仪联合 Lokomat 下肢康复机器人对脑卒中患者步行功能的疗效[J]. 中国康复理论与实践, 2016, 22(8):921-926.
LIU Yan-ping, LUO Jia, YANG Jing-hui. Effects of Lokomat robotic-assisted gait training combined with drop foot stimulator on gait function in patients with stroke[J]. Chinese Journal of Rehabilitation Theory and Practice, 2016, 22(8):921-926. (in Chinese)
[5] Zambraski E J,Yancosek K E. Prevention and rehabilitation of musculoskeletal injuries during military operations and training[J]. Journal of Strength and Conditioning Research,2012, 26(S2):S101-S106.
[6] Armed Forces Health Surveillance Center. Brief report: morbidity burden to attributable to illnesses and injuries in deployed ( per Theater Medical Data Store TMDS ) compared to non deployed (per Defense Medical Surveillance System DMSS) settings, active component,U.S. Armed Forces, 2010[J]. MSMR,2011(18):14-15.
[7] Hauret K G, Jones B H, Bullock S H, et al.Musculoskeletal injuries description of an under-recognized injury problem among military personnel[J]. American Journal of Preventive Medicine, 2010, 38(S1): S61-S70.
[8] Roy T C. Diagnoses and mechanisms of musculoskeletal injuries in an infantry Brigade Combat Team deployed to Afghanistan evaluated by the brigade physical therapist[J]. Military Medicine,2011,176(8): 903-908.
[9] Rhon D I, Gill N, Teyhen D, et al. Clinician perception of the impact of deployed physical therapists as physician extenders in a combat environment[J]. Military Medicine, 2010,175(5): 305-312.
猜你喜欢
汽车实用技术(2022年5期)2022-04-02 09:36:40
汽车实用技术(2022年5期)2022-04-02 09:36:20
中学生数理化·七年级数学人教版(2021年9期)2021-11-20 06:11:52
装备制造技术(2020年9期)2021-01-26 00:15:08
河北省科学院学报(2020年1期)2020-05-25 06:57:18
中国新技术新产品(2020年4期)2020-05-05 15:49:48
制造技术与机床(2018年11期)2018-11-23 01:07:50
解放军健康(2017年5期)2017-08-01 06:27:42
知识经济·中国直销(2016年2期)2016-11-07 09:33:42
海军航空大学学报(2015年1期)2015-11-11 17:18:37