一种自动判分的智能小车竞赛平台
2018-05-13 23:01:04潘欣裕毕自强董兴法付保川
实验科学与技术 2018年2期
潘欣裕,毕自强,王 俭,董兴法,付保川
(苏州科技大学 电子与信息工程学院,江苏 苏州 215009)
在人工智能、机器人技术等课程越来越受到学校重视[1-3],并被引入课程设置和教学计划的今天,与上述课程相配合的实验装置成为学校和任课教师迫切需要的辅助教学工具[4-8]。缺乏实用的机器人比赛场地以及相应配套的监控评判软件成了亟需解决的问题。
各类大专院校通过相关课程和学科竞赛的规划,构建了很多实验中心,也形成了不同的教学理念[9-11]。但目前这方面已有的场地多为大中专学生参加的各种各样机器人竞赛的设施,如Robo-Cup比赛、全国智能机器人大赛、江苏省大学生机器人大赛等比赛的场地。它们有的占地过大,有的制作过难,有的日常维修量较大,有的不易搬运,有的运行过于繁琐,有的比赛评判标准不够科学。这些现状都凸显了适合学校教学的配套智能小车比赛场地处于一个有待发展的阶段。
如果能将摄像头采集图像的技术和数字图像处理技术、红外收发对管及其信号处理技术等运用在智能小车比赛方面,构成全监控自动判分的比赛场地,将对人工智能和机器人技术等课程的教学起到很好的支持辅助作用,无疑是一个很有意义的应用方向。
本文介绍的一种自制的全监控自动判分的智能小车竞赛平台,可以通过累计路程和计时,对智能小车比赛进行成绩判定,并借助简明直观的人机界面予以显示。
1 装置组成与原理
全监控自动判分的智能小车竞赛平台,由比赛场地、监控系统和判分系统3个主要部分组成。可以通过监控系统,对智能小车的行驶进行计时,对智能小车行驶轨迹进行记录,对智能小车所走的路程进行累计,并通过判分系统对智能小车比赛过程进行判分,通过简明直观的人机界面,对各项结果予以显示。
1.1 比赛场地本体
比赛场地的立体示意图如图1所示。比赛场地的本体由底板、挡板和隔板组成,采用胶合板制作。底板上设置若干隔板,形成类似迷宫的效果。挡板围在底板四周,以防止智能小车越出场地。底板上放置若干减速条,给比赛增加一定的难度。摄像头由空心塑料管支架固定于场地正上方。
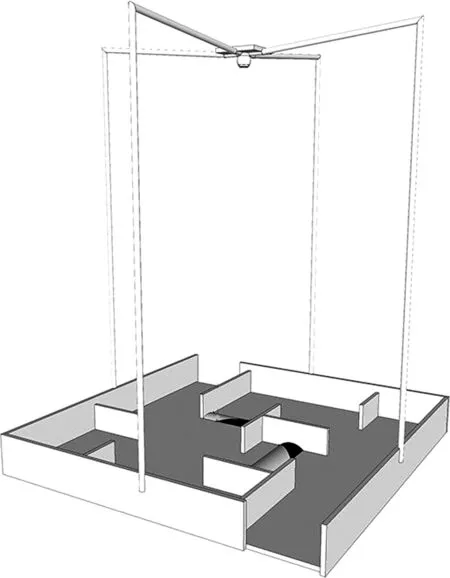
图1 比赛场地的立体示意图
比赛场地平面布局如图2所示。场地的入口处和出口处的挡板和隔板上各安装有一对红外收发对管,对从其间经过的智能小车具有感知作用。
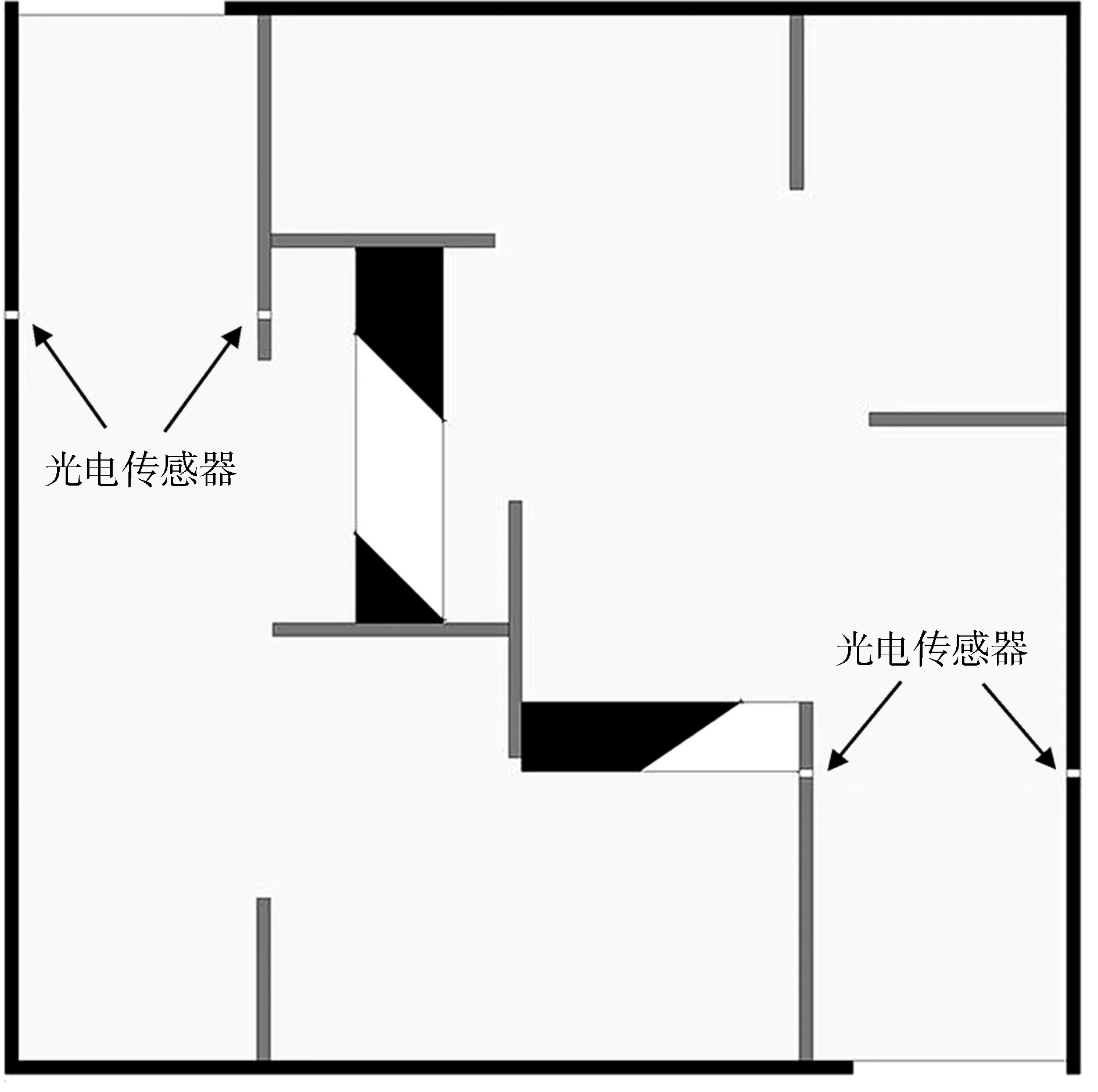
图2 比赛场地的平面布局图
1.2 电子系统
电子系统主要由监控系统和判分系统两部分构成。监控系统包括影像模块、位置检测模块和人机界面模块3部分;判分系统包括计程模块、计时模块和判分模块3部分。各个模块的工作由计算机统一协调管理,如图3所示。各个模块的组成及功能如下:
1)影像模块,由摄像头和相应软件组成,将图像信息进一步处理以得到智能小车的位置和路线;
2)位置检测模块,由红外收发对管和附属电子电路组成,如图4所示,可感知智能小车是否起跑和撞线,并负责给计时模块发送开始和停止计时的信号;
3)计程模块,根据影像模块的结果进一步处理得到智能小车总的行驶路程;
4)计时模块,根据位置检测模块提供的信号,启动和停止计时;
5)判分模块,结合计程模块提供的路程数据和计时模块提供的时间数据,根据规则和算法综合得到智能小车的比赛得分。
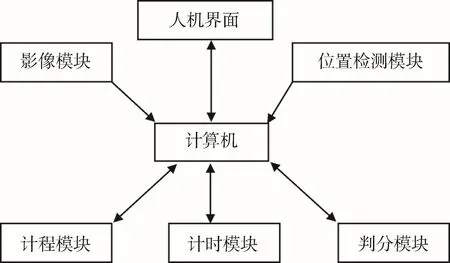
图3 电子系统各功能模块关系框图

图4 用于感知小车位置的红外收发对管
1.3 小车控制方式简介
可通过两种方式对小车进行控制,一是在PC端通过按键实现对小车的前进、后退、左转及右转进行控制;另一种方式是通过非特定人语音识别技术,通过语音信号进行指令识别后,操控小车的行为。不论采用哪种方式,PC在接收指令后,向USB端口发送控制字指令,随后可利用RF2401、蓝牙、zigbee等无线模块(本系统可以与不同的通信模块实现无缝对接,无需调整软硬件系统)发送通信指令,实现小车的运动控制。
1.4 人机交互界面
竞赛平台的控制与人机交互界面如图5和图6所示。图5的控制面板中包含了PC与小车通信的接口选项,前、后、左、右运动控制选项,还有语音识别控制选项与结果显示标志。本识别系统可以识别并实现非特定人的前进、后退、左转与右转四种控制命令。图6的人机交互界面指示了小车的历史行进轨迹 (图中弧线),行进的距离 (图中左上角的Distance=212 cm),以及小车的行驶时间 (图中右上角的25”11)。

图5 PC端通信与控制界面

图6 行车轨迹及参数指示人机交互界面
2 影像信号处理及判分算法
本文的竞赛平台安装了CCD视频传感器和红外光传感器。前者就是摄像头,主要完成对小车的实时捕捉,利用软件进一步处理后,可得到小车的位置坐标、行驶轨迹和累计路程等数据信息。后者就是红外收发对管,主要完成对小车穿过对管事件的感知,计时模块硬件电路由其可得到小车比赛耗时的数据,软件结合加工后的路程数据给出比赛得分。
2.1 镜头畸变校正
考虑到成本和经费的因素,本文所制作的竞赛平台购置的摄像头质量不高,存在很明显的镜头畸变的问题,即所拍摄到的图像边缘部分会发生变形。从图6中也可以看出,所拍摄到的方形竞赛场地影像发生了桶形畸变。本文采用文献 [12]的方法,利用平面网格模型事先求取镜头的畸变系数,在实际使用中对像素点进行参数校正,可在不影响处理速度的前提下,满足本系统的测量精度要求。
2.2 CCD传感器视频影像的处理
对摄像头进行视频采集后,对每一帧图像分步进行了处理,如图7所示。

图7 影像模块的算法描述框图
1)将彩色图像转化为灰度图像,然后对其进行边缘检测。
2)对图像进行二值化处理 (灰度值小于127设为0,大于127设为255)。
3)对二值化后的图像进行形态学膨胀,形态学图形为15×15的矩形。由于小车上的边缘信息比较密集,膨胀后分散的色块聚集起来形成了一个大的连通域。
4)进行两次形态学腐蚀,形态学图形分别为40×40和10×10的矩形。由于上一步形成的连通域比较大所以没有被完全腐蚀掉,而小车以外的其他物体会被腐蚀掉。
5)再一次用15×15的矩形进行形态学膨胀,将小车的色块放大。
6)对色块做寻找重心的操作,标记小车的位置,然后进行滤波处理使小车的位置稳定下来,显示在图片上,并在图片上画出小车的行进轨迹,计算小车行进的距离。
2.3 判分规则
判分原则包括快速、安全、节能、环保等要求,由该原则决定的判分标准主要考虑所用时间和所经路程,兼顾停顿(启动)次数、转向次数和碰撞次数等指标。完成比赛的小车得到的初始扣除分值为:

式中,T是时间,L是路程,S是启动/停止次数,D是转向次数,B是碰撞次数,α、β、γ、ρ、ε则是相应的权重系数。
其中,时间T和路程L可以通过系统自动获得,如图6所示,左上角显示小车运动路程212 cm,运动时间25.11 s。启停次数、转向次数和碰撞次数的记录尚需要人工记录辅助,但一般情况下出现碰撞或启停等次数过多必然导致运行时间加长,同时路程也相应增加,所以时间和路程信息已经在一定程度上包含了这3种计数信息。
根据实际所选小车的试车情况,选择各变量和系数的最大值,得到理论最高扣除分值Mmax,然后按照式 (2)给出百分制的比赛最后得分:

一般情况下设定α+β+γ+ρ+ε=1。例如设α=0.4,β=0.3,γ=0.1,ρ=0.1,ε=0.1,其中某次测试得分为:运行时间T=25.11s,距离L=212 cm,中途启停次数S=0次,转向次数D=12次,碰撞次数B=0次。代入式(1)可得M=11.88。
另外预设各参数的最大值为:运行时长200 s,距离10 m,启停次数5次。转向次数30次,碰撞次数5次,则理论最高扣除分值Mmax=87分。
根据式(2),得到本次测试:

用户可以根据不同的要求自行设置相应参数,以便得到合理的分数。
3 平台可承担的比赛项目及实例
本文所设计的竞赛平台没有对参加比赛的智能小车加以过多限制,除车身外形尺寸之外,使用者可以有较广泛的小车选型的自主权。事实上,本文在教学中实际采用的车型和控制方式也是多种多样的,主要包括以下3种。
1)传感器小车。
使用传感器进行自主循迹的智能小车,比如在车上装载超声波和光学模块,用于避障和测量。这样的小车可以自主地完成预先设定的功能,通过传感器识别挡板并绕过障碍物最终到达目的地。
(2)声控小车。
用语音识别系统控制的小车。在实际使用中可采用科大讯飞、苹果等公司的识别系统,用语音识别的结果来控制小车运动。如图8所示的语音控制的小车,麦克风接收到语音信号并进行识别,指令信号通过无线通信系统NRF2401传输给小车,控制小车的行进。

图8 语音控制智能小车
3)遥控平衡车。
遥控的两轮自平衡小车。制作了遥控的两轮自平衡小车,通过蓝牙连接PC机,用键盘控制行进,如图9所示。

图9 两轮自平衡小车
4 结束语
综上所述,本文介绍的自制全监控自动判分的智能小车竞赛平台,结构简单,功能设置合理,成绩判定科学,人机界面简明直观,具有空间小、易搬运、制作简单、维护方便、易于操作、工作可靠等优点。另外,该平台还具有一定的成绩判定原则和规则的开放性,使用者可根据使用情况制定并实现符合自身要求的成绩判定方法。除此之外,使用者还有较广泛的机器人选型的自由权,可根据自身情况选用参加比赛的智能小车。本平台制作简便,安装和维护方便,成本也比较低,易于推广。
[1]王军,李明.面向机器人工程对象的 “创新研究型实验”课程建设[J].实验室研究与探索,2013,32(6):279-282.
[2]阎世梁,张华,肖晓萍,等.高等工程教育中的机器人教育探索与实践[J].实验室研究与探索,2013,32(8):149-152.
[3]沈刚,安昭辉,李翔,等.并联机器人在机械工程实验教学中的应用[J].实验技术与管理,2015,32(3):179-182.
[4]徐晓红,郑志强,卢惠民.构建机器人技术创新实践基地的探索与实践[J].实验室研究与探索,2015,34(3):185-189.
[5]朱大奇,颜明重.移动机器人路径规划技术综述[J].控制与决策,2010,25(7):961-967.
[6]卢惠民,李迅,徐晓红,等.合作学习教学模式在学科竞赛中的应用研究[J].高等教育研究学报,2013,36(3):80-82.
[7]万佑红,蒋国平.机器人教育与大学生创新能力培养的探索[J].电气电子教学学报,2005,27(4):6-8.
[8]王小荣,苟向锋,杨晋,等.以RoboCon和RoboCup为契机构建创新型的机械工程实践中心教学体系[J].实验室研究与探索,2009,28(11):153-155.
[9]王甲海,印鉴,凌应标.创新型人工智能教学改革与实践[J].计算机教育,2010(15):136-138.
[10]陈东青,谭兆湛,邝禹聪,等.依托实验中心探索机器人实训教学模式[J].实验科学与技术,2015,13(6):164-165.
[11]潘小琴,徐海龙.智能机器人与创新实践教学的一体化建设[J].实验科学与技术,2016,14(3):215-218.
[12]朱铮涛,黎绍发.镜头畸变及其校正技术[J].光学技术,2005,31(1):136-138.
猜你喜欢
车迷(2022年1期)2022-03-29 00:50:24
中学生数理化·七年级数学人教版(2022年3期)2022-03-16 05:55:44
智能建筑电气技术(2022年2期)2022-02-06 02:30:34
陕西画报(2021年1期)2021-04-22 12:15:46
中国化妆品(2020年9期)2020-10-09 08:56:56
数学小灵通·3-4年级(2020年6期)2020-06-24 06:17:32
小学生学习指导(低年级)(2019年10期)2019-11-26 22:24:19
小学生学习指导(高年级)(2019年6期)2019-01-11 00:19:08
发明与创新·小学生(2018年12期)2018-12-29 09:05:34
小学生学习指导(低年级)(2017年12期)2017-11-22 06:22:28