基于STM32的燃气轮机振动监测系统的设计*
2018-05-03 05:24孙倩,丁超,尹菲
传感技术学报 2018年4期
孙 倩,丁 超,尹 菲
(中国船舶重工集团公司第703研究所无锡分部,江苏 无锡 214151)
燃气轮机作为一种重要的动力装置,其关键部位的机械振动包含的信息丰富[1]。燃气轮机结构复杂,剧烈的振动会导致轴承等的摩擦磨损、机构传动失灵,也会造成构件裂纹的萌生与疲劳破坏。有效地监测振动信号可以表征燃气轮机轴承在不同工况下重要信息,通过频谱分析可以确定主要频率成分及其幅值大小,可以为测量人员提供清晰明确的分析数据和图形,从而进行危险预报、故障诊断,并采取相应的措施。因此,进行振动监测具有十分重要的意义,振动测量工作也受到了广泛的关注。
大部分的燃气轮机振动监测仪是多通道集成,提供固定通道的信号前置放大器和数采卡,体积大,安装不便,在环境适应性方面存在着局限。其内部信号调理电路则通常采用纯模拟电路实现,提取频段的滤波电路也采用模拟滤波的方式实现,消耗大量的硬件资源,噪声和干扰对测量的影响较大,电路复杂[2],电路特性易受环境影响,且修改滤波频段必须修改硬件电路,因此在工程适应性方面也存在着局限。本文根据FIR数字滤波器的原理设计了一种以微控制器STM32为核心,辅助FIR数字滤波器的燃气轮机振动监测系统,摆脱了硬件电路的限制,可以根据实际情况修改滤波频段,频段提取准确,灵活小巧,适合燃气轮机分布式测控发展方向的需求,具有广泛的应用前景。
1 系统总体设计
燃气轮机振动监测系统主要包括振动传感器、积分电路、放大电路、A/D转换电路、控制系统、D/A转换电路、数据存储电路等组成,如图1所示。

图1 燃气轮机振动监测系统工作原理图
2 系统硬件设计
2.1 主控单元
数字电路部分主要为低功耗、小型化的设计核心[3],因此主控单元选用意法半导体公司(ST)推出的32位高性能微控制器STM32F405RGT6作为燃气轮机振动监测系统的主控单元。主控单元是系统的核心单元,其性能很大程度上决定系统整体性能[4]。STM32F405RGT6是基于ARM Cortex-M4内核的高性能微控制器,搭载1MB的Flash,192KB的RAM[5],且配有丰富的外设接口[6],同时集成了FPU和单周期DSP指令,具备高性能数字信号处理能力。主控制电路包括主控MCU及复位电路、JTAG电路、晶振电路,如图2所示。

图2 燃气轮机振动监测系统主控单元电路图
晶振电路采用双晶振电路,左侧PC14、PC15为外部低频晶振,用于RTC时钟,为32.768 kHz,右侧PH0为HSE,常用外部高频,PLL倍频用,为8 MHz。
2.2 A/D转换电路
由于加速度传感器耐冲击、抗过载能力强、响应快、稳定性高的特点[7],在振动测量领域得到了广泛应用。这些振动传感器输出的信号为电荷信号,电荷量通常通过电容转为交流电压来进行测量,本系统的控制器STM32F405RGT6自带的A/D采集端口不能直接采集交流电压,因此选择外置的高精度交流A/D转换芯片,缩减硬件电路体积,提高系统可靠性。本系统中需要测试的振动信号的精度频率f为1 Hz,速度有效值为0.1 mm/s,其对应的振动加速度值为
a=2πfv=0.000 628 m/s2
电荷型加速度传感器将振动加速度信号转换为电荷信号输出,输出的电荷量q正比于加速度a和传感器的灵敏度Sq,选用的电荷型加速度传感器的灵敏度为10 pc/m-2,
q=Sqa=0.006 28 pc

图3 燃气轮机振动监测系统电荷转换电路
电荷传感器将采集的振动信号转换为电荷信号输出,电荷型号需通过电容转换成电压信号,并输出到信号采集电路中以进行后续处理进行处理[8],电荷转换电路如图3所示,其中用来进行电压转换的电容C1选择100p的精密电容,即
u=q/c=0.006 28 mV
AD977AARZ是16位高速、低功耗的A/D转换芯片,它可以直接采集交流电压信号,且输入电压范围为±10 V,该A/D转换芯片的分辨率为
R=20/216=0.305 mV
因此需引入放大电路才能满足系统精度要求,放大电路图如图4所示。
AD780是一种带超低漂移、低初始误差和低输出噪声的带隙基准芯片。采用AD780作为AD977双极A/D转换模式的外部参考电压芯片,可以保证输入信号在A/D转换时达到高精度、低温漂的需求,A/D转换电路图如5所示。
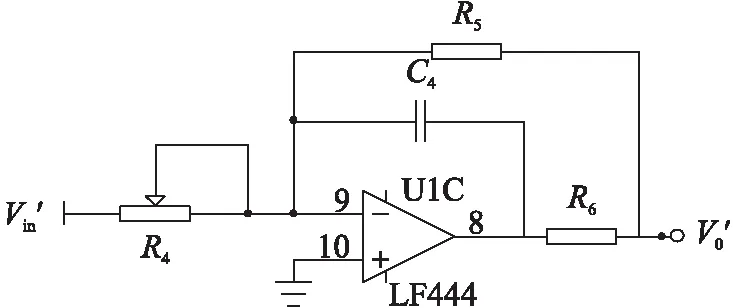
图4 燃气轮机振动监测系统放大电路

图5 燃气轮机振动监测系统A/D转换电路图
2.3 D/A转换电路
由于电流信号与生俱来的抗干扰能力,在噪声环境复杂的工业现场具有很高的可靠性,同时4 mA~20 mA电流环通信还具有可靠的断线故障诊断功能,因此本系统信号输出采用D/A转换芯片AD5421CREZ实现4 mA~20 mA电流输出,使系统更加可靠、抗干扰能力更强[9],D/A转换电路图如6所示。
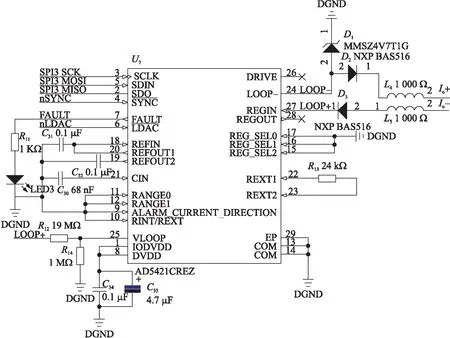
图6 燃气轮机振动监测系统D/A转换电路图
3 系统软件设计
3.1 Hamming窗FIR滤波器的设计
在振动信号的测量通常都难以避免的掺杂着噪声[10],而燃气轮机根据自身实际工况运行的图谱,关注的振动信号通常集中在某个频段内,因此振动监测系统的滤波能力尤为重要。
由于模拟滤波器的局限性,本文设计的燃气轮机振动监测系统采用的是数字滤波器。所谓数字滤波,就是通过一定的计算机程序,对采集的数据进行处理,从而消除或减小干扰和噪声的影响,提高测量的可靠性和精确度[11]。数字滤波器具有设计灵活、精度高、稳定性高、实现方便等许多突出优点。数字滤波根据其冲激响应函数的时域特性,可分为无限长冲激响应(IIR)数字滤波器和有限长冲激响应(FIR)数字滤波器。FIR数字滤波器相比于IIR数字滤波器不仅系统稳定、能够满足幅度特性,而且能够保持严格的线性相位特性,更适用于燃气轮机的振动监测,因此本系统选用了FIR数字滤波器来实现滤波。
FIR数字滤波器的系统函数可以表示为:
在FIR滤波器的窗函数设计方法中,窗的选择将直接影响滤波器的性能优劣[12],本系统采用了Hamming窗,滤波频率为100 Hz~400 Hz(根据现场实际情况进行设定与修改)。Hamming窗函数为:
其频谱函数WHm(ejw)为
其幅度函数WHmg(w)为
Hamming窗能量集中在主瓣中,是一种高效窗函数。滤波频段100 Hz~400 Hz在MATLAB中利用Hamming窗进行数字滤波的波形如图7所示。

图7 Hamming窗数字滤波器
3.2 滤波试验数据
燃气轮机振动监测系统的量程为速度0~70 mm/s,滤波频段为频率100 Hz~400 Hz,对应直流电流输出为4 mA~20 mA。本文采用B&K4808振动台作为信号发生器,提供标准的振动信号,对燃气轮机振动监测系统进行频响检验。
给定振动信号输出速度为20 mm/s,调整输入频率从10 Hz~1 000 Hz进行扫频,要求的滤波频段内对应的振动测量系统的理论直流电流输出应为8.53 mA,滤波频段外信号输出值按滤波特性衰减,频响特性试验数据如表1所示。
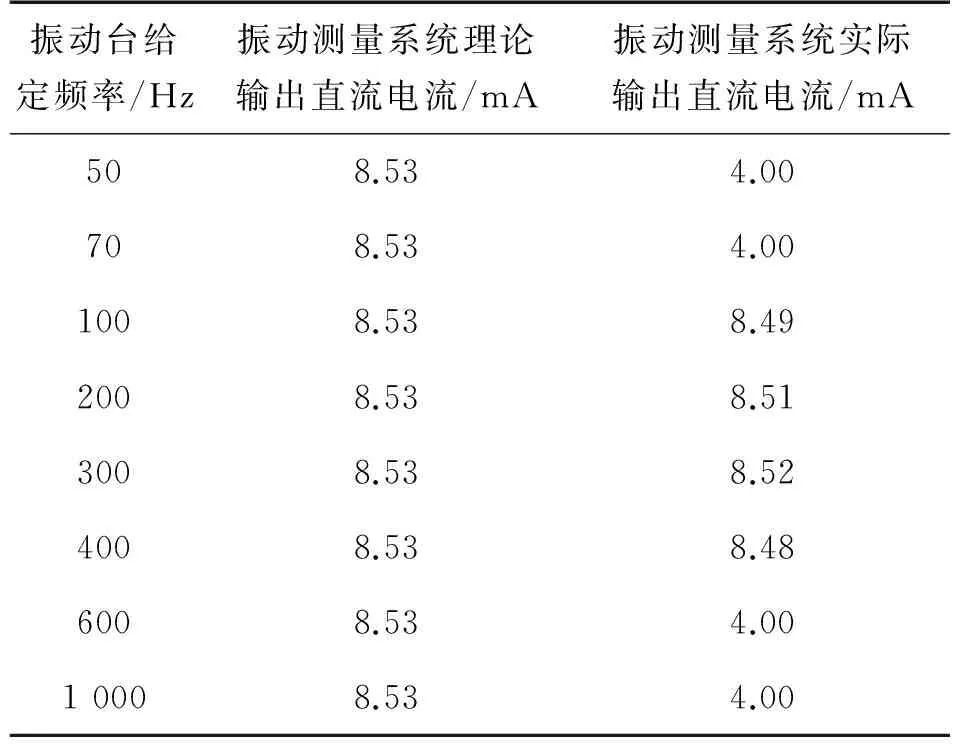
表1 燃气轮机振动监测系统频响特性数据表
振动测量仪的测试结果误差都在±2%以内,规定频率段内数据提取干净,满足监测要求。
4 结论
本文设计的燃气轮机振动监测系统是一款基于微控制器STM32,辅助FIR数字滤波器(Hamming窗)的智能测量系统,减少了硬件电路的使用,摆脱了模拟滤波硬件电路的限制,可以方便、准确提取滤波频段内振动信号,频段提取准确,具有广泛的应用前景。
参考文献:
[1] 褚士凯,秦会斌. 风力发电机振动采集系统的设计[J]. 电子器件,2017,40(1):232-236.
[2] 严家明,黄永阳,侯晓伟. 基于ARM的振动传感器幅频特性测试系统研究[J]. 传感技术学报,2011,24(11):1564-1568.
[3] 郝鹏,张伟,陈锐. 高精度石英加速度计采集电路设计[J]. 传感技术学报,2017,30(5):678-683.
[4] 张根宝,程震晨. 基于STM32F4和μC/OS-Ⅲ的水质氨氮检测系统研究与设计[J]. 电子器件,2016,39(6):1472-1476.
[5] 易诗,林凡强,周姝颖. 基于STM32的语音控制机械手[J]. 电子器件,2017,40(1):162-165.
[6] 吴瑞东,王宇,王东,等. 光纤振动传感系统相位调制模块的嵌入式设计[J]. 传感技术学报,2017,30(2):200-205.
[7] 王艳阳,石云波,王华,等. 高g值加速度传感器校准不确定度及误差分析[J]. 传感技术学报,2016,29(7):971-976.
[8] 毕超,郭霞,徐昌语,等. 高温电容位移传感器的设计与实验研究[J]. 传感技术学报,2016,29(10):1509-1515.
[9] 郭瑞鹏,梁钊铭,王海涛,等. 基于光谱技术多气体检测系统的设计[J]. 传感技术学报,2017,30(4):628-632.
[10] 周金刚,彭东林,郑方艳,等. 基于STM32F4的时栅数控分度转台控制系统[J]. 电子器件,2015,38(5):1138-1143.
[11] 张世英,于玺兴,朱杰堂. 智能转速传感器设计[J]. 传感技术学报,2011,24(2):313-316.
[12] 黄晓红,苏飞,王兆华. 基于单窗全相位数字滤波器和LMS准则的窗函数设计[J]. 传感技术学报,2007,20(6):1312-1315.
猜你喜欢
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
地震研究(2021年1期)2021-04-13
航天电子对抗(2019年4期)2019-12-04
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
系统工程与电子技术(2016年7期)2016-08-21
CHIP新电脑(2016年3期)2016-03-10
火控雷达技术(2016年2期)2016-02-06
燃气轮机技术(2014年4期)2014-04-16
燃气轮机技术(2014年4期)2014-04-16