
张力腿平台总强度分析关键技术研究
2018-05-03 09:01:03王一江夏侯命胜罗东红杨东亚沈玉琦
船舶 2018年1期
王一江 夏侯命胜 罗东红 杨东亚 杨 玥 沈玉琦
(1.中海石油深海开发有限公司 珠海518000;2.中国船舶及海洋工程设计研究院 上海200011;3.上海交通大学 船舶海洋与建筑工程学院 上海200240)
引 言
张力腿平台是一种半顺应式半刚性平台[1],主要由平台上体、立柱、浮箱、张力腿和锚固基础这五部分组成。由于该类平台不仅垂荡运动较小,而且控制方向的张力对非控制方向的运动具有牵制作用,所以漂移摇摆的幅度也比一般半潜式平台小,在波浪中具有较好的运动性能,很好地解决了传统移动式平台运动性能和定位难以满足深水作业需求的问题,还具有造价低,干湿采油树均可布置等优点,被越来越广泛地应用于深海油气开发领域[2-3]。
张力腿平台主要承受复杂多变的风、浪、流载荷以及浮体、立管和张力腿系统的动力载荷。为满足功能与安全性要求,需要对张力腿平台进行结构强度研究,主要包含总强度分析和局部强度分析(关键连接部位)两部分。本文根据API、ABS和DNV等设计规范,针对某张力腿平台在LIUHUA边际油田海域环境条件下,进行张力腿平台总强度计算分析和研究;并根据张力腿平台独有的结构及功能特点,深入探讨其总强度分析工况及载荷,基于波陡理论的随机海况波浪条件下设计波的确定,计算不同阶段张力筋腱的模拟和各计算工况下结构安全系数的选取。本文旨在研究张力腿平台结构的承载能力及载荷传递路径,为类似平台设计提供参考。
1 平台总体结构型式特点
张力腿平台主体结构主要由浮箱、立柱和上部组块(或上部模块主框架)结构三个部分组成,各个部分自成一体又相互连接,以抵抗不同设计状态下的自重、功能载荷以及环境载荷,其整体示意图如图1所示。由于张力腿平台的构造特点,其主要承载构件间的连接必然存在形状突变,易产生应力集中及疲劳问题,结构设计必须针对该类结构进行重点分析。因此,上述总强度载荷传递路径上的结构合理设计是平台结构安全的关键保证,需严格按照船级社规范要求,充分考虑设计参数敏感性的载荷直接预报以及有限元分析的校核和验证。
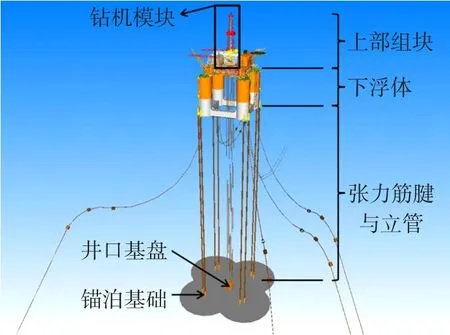
图1 张力腿平台(TLP)总体示意图
2 分析工况及载荷
张力腿平台与单体式的船形浮体不同,总强度分析存在挤压、分离力、剪切、扭矩、弯曲和惯性加速度等多个主控载荷模式[4],通过浮箱、立柱与上部组块(或上部模块主框架)间保持连续关系的主要承载构件,将上部组块的各种功能载荷、水线以下结构承受的波浪载荷及张力筋腱载荷等顺利传递、扩散至整个平台。其总强度分析一般包括一年一遇作业工况、百年一遇极限工况以及千年一遇自存工况。各工况载荷均按照最不利的方向进行组合,如表1所示。
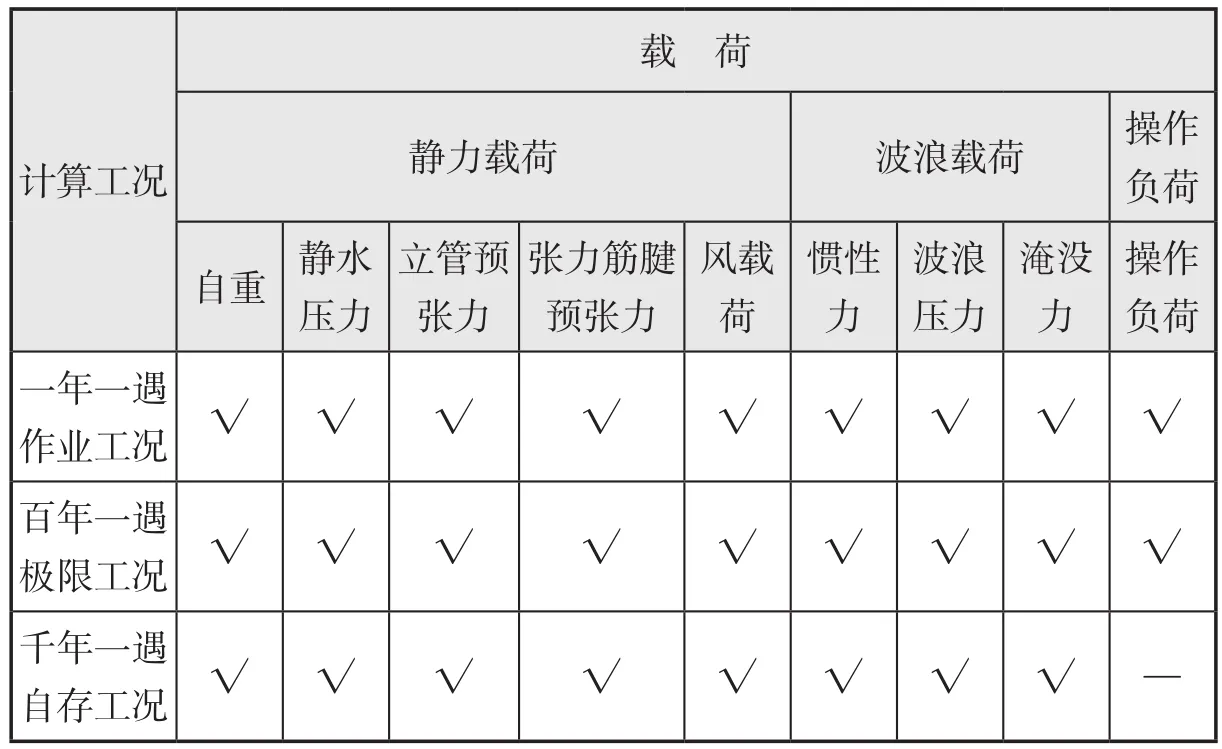
表1 钻台设计载荷及工况组合
环境载荷方向及坐标系定义见图2所示。其中,淹没力(Inundation load) 是指静水线面以上的波浪压力,主要反映了非线性波浪爬升的影响[5]。该载荷可通过CFD方法进行精确计算,但相对其他载荷,除对水线处局部构件的应力结果产生影响外,对平台总强度影响较小。因此,工程上单根立柱上的淹没力大小一般取该立柱总的波浪压力的10%,并以节点力的形式施加于立柱水线面位置。
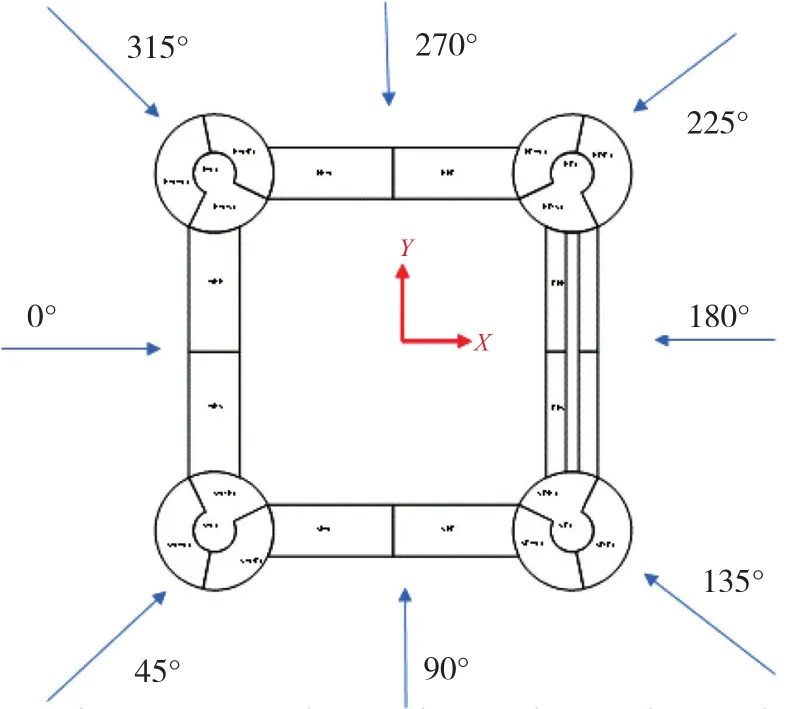
图2 环境载荷方向及坐标系定义示意图
3 张力筋腱的模拟
虽然张力腿平台主体结构与一般半潜平台结构类似,但是在张力筋腱的高预张力作用下,不仅影响了平台的运动响应[6],还导致平台受力模式及计算力学模型模拟方法(尤其是考虑张力筋腱作用下的边界条件)与其他半潜平台有较大区别。为合理模拟张力筋腱对平台的约束及载荷作用,本文在张力腿平台水动力计算模型中,通过选取Morison模型中的Tendon单元模拟张力筋腱,以便在水动力求解时模拟其预张力及刚度;同时通过水动力求解,得到张力筋腱上各向张力的传递函数,用于目标设计波的确定以及进一步张力筋腱抱紧器基座结构强度分析。在总强度计算模型中,通过张力筋腱模型与结构模型合并处理方法,将张力筋腱的张力载荷通过Tendon单元传递至张力筋腱基座,从而更准确反映平台受力传递途径。同时,为更加准确模拟张力筋腱对平台的约束作用,一般在张力筋腱基座处施加x、y、z三个方向的弹性约束(如图3所示)。
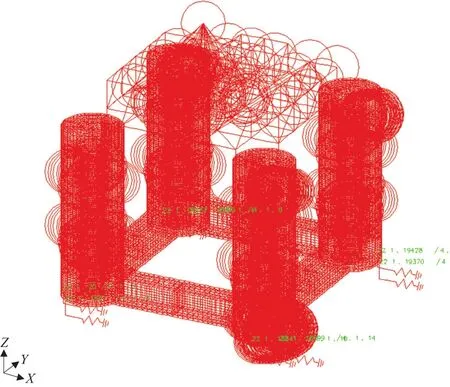
图3 张力腿平台总强度计算边界条件示意图
水动力计算中得到的张力筋腱动态张力也可以通过该弹性单元传递。弹性单元三个方向刚度计算如下[5]:
轴向刚度:Kz= EA/L= 7.651E+04 (N/m);
水平刚度:Kx=Ky=T/L= 53.049 (N/m);式中:A为张力筋腱最小剖面面积(张力筋腱截面示意图见图4);L为张力筋腱长度;T为张力筋腱预张力。
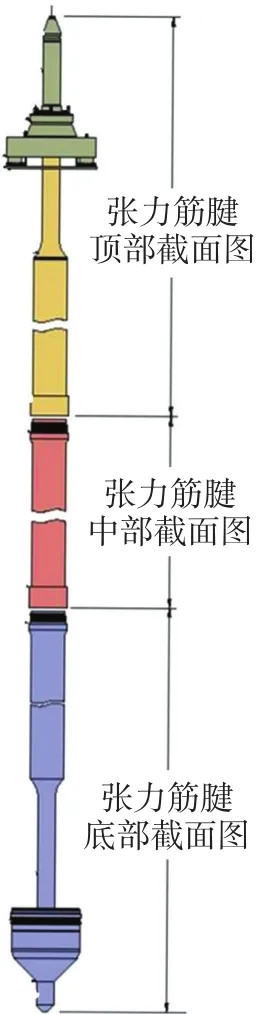
图4 张力筋腱截面示意图
4 腐蚀余量及安全系数的选取
张力腿平台总强度分析另一关键因素是腐蚀余量及安全系数的选取。其中,各船级社对于腐蚀余量的规定对比[5-9]如表2所示。实际工程计算时,考虑到平台结构质量对平台总体性能的影响敏感,且对于整个平台的防腐系统的设计一般能对平台整个生产运营周期进行保护,因此在进行总强度计算分析时(结构疲劳分析除外)可以不考虑腐蚀余量。
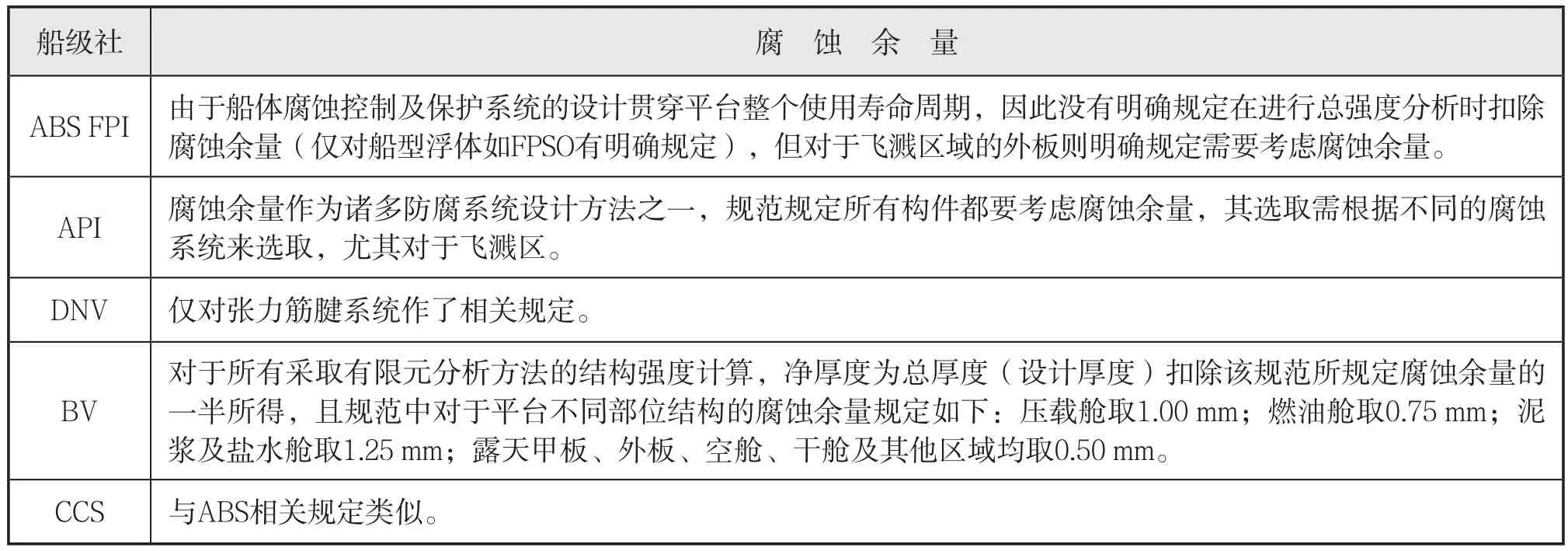
表2 各船级社规范关于腐蚀余量的规定
强度校核许用应力的确定,关键在于各工况下安全系数的选取。由于本目标平台为生产平台,相对于作业周期较短的钻井平台(如“981半潜式钻井平台”),不仅计算工况更细(增加“千年一遇”海况)且衡准更高(见表3)。本文应力衡准主要采用《美国海上浮式生产装置入级与建造规范》(ABS FPI),该规范中对平台构件(GR345B钢,Fy= 345 MPa) 的许用相当应力安全系数规定参见表3。[4]屈曲强度安全系数参见表4。
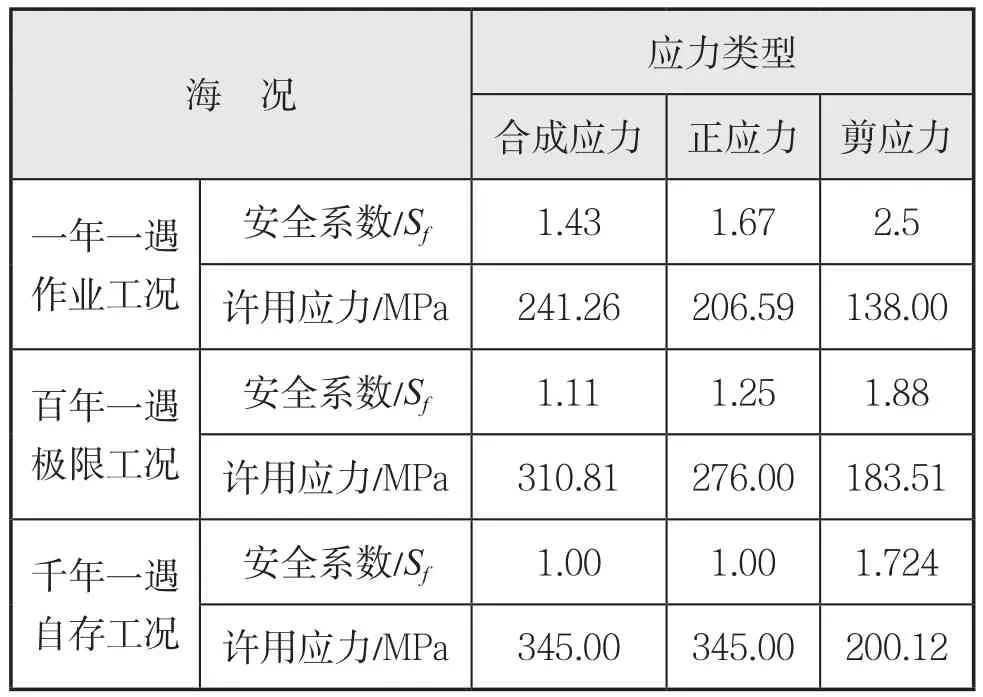
表3 各海况下的屈服许用应力及相应安全系数(ABS FPI)

表4 各海况下的屈曲强度安全系数
5 平台总强度控制工况研究
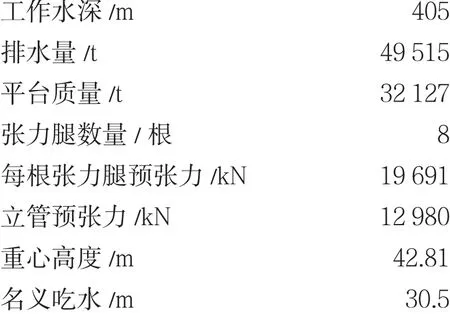
为研究张力腿平台总强度控制工况及关键结构强度设计,本文研究的目标平台主体由四边形桁架式平台上部组块、4个圆形立柱和方形浮箱组成的下浮体构成,其主要参数如下:
5.1 平台设计波的确定
水动力模型包括湿表面模型、质量模型和张力筋腱Morison模型,参见图5。
图5 平台水动力模型
其中湿表面模型单元采用三角形单元和四边形单元,通过三维绕射理论计算平台典型剖面载荷,获得各工况下载荷分量的传递函数,最后根据波浪散布图和波浪谱完成典型剖面载荷的短期及长期预报,确定目标平台设计波。在设置水动力相关参数时,由于张力腿平台各剖面载荷分量的波浪周期敏感区域约为3~20 s,故选取周期3~50 s,步长取1.0 s(其中10~20 s的步长取0.5 s),选取中国南海一年一遇、百年一遇和千年一遇的海况条件进行设计分析。波浪载荷长期预报时选用的波浪散布图为中国南海夏季波浪散布图,波浪谱为JONSWAP谱。各海况波浪谱参数如图6 -图8所示。
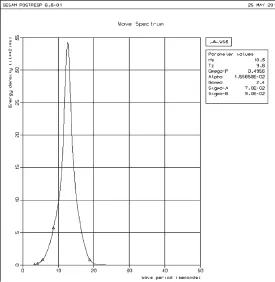
图6 一年一遇波浪谱

图7 百年一遇波浪谱

图8 千年一遇波浪谱
为确定强度计算最危险海况,提高计算精度,本文在波浪载荷预报分析时,对平台的目标波浪载荷进行基于波陡理论的随机海况波浪条件下的周期敏感性分析。首先根据南海海况资料的“千年一遇”海况,在4~20 s周期下进行目标载荷周期敏感性分析,结合波陡限制找到目标载荷响应最危险的短期海况周期和最危险的目标载荷。在此基础上确定平台设计波参数的,其中千年一遇自存工况下的设计波参数参见下页表5,典型波浪载荷响应传递函数参见下页图9 -图16。

表5 平台千年一遇自存工况设计波参数
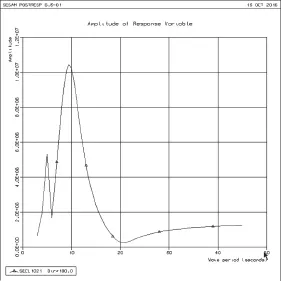
图9 LC1-平台纵向分离力传递函数

图10 LC2-平台垂向剪力传递函数
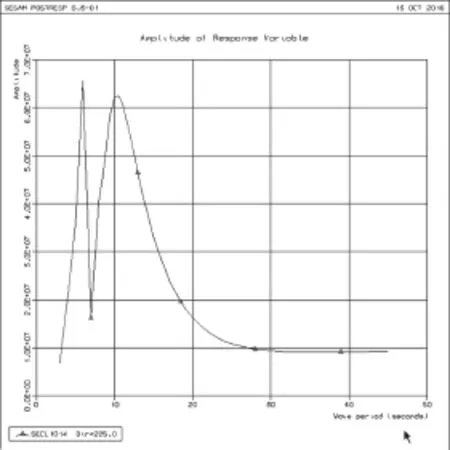
图11 LC3-浮箱扭矩传递函数

图12 LC4-浮箱弯矩传递函数
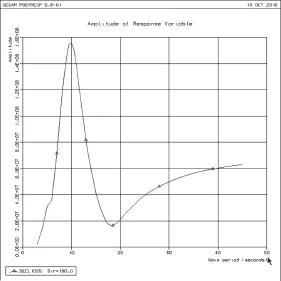
图13 LC5-平台弯矩传递函数

图14 LC6-平台水平剪力传递函数
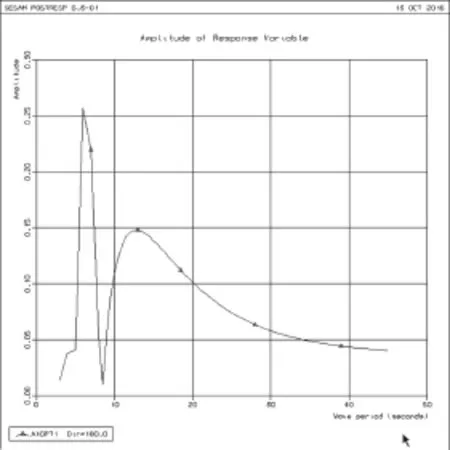
图15 LC7-平台加速度传递函数

图16 LC8-平台对角线分离力传递函数
5.2 平台总强度模型
张力腿平台相对半潜平台上部组块一般为桁架式结构,且与下浮体连接为嵌入式,该型式与滑动式(如FPSO的Topside滑动支墩)的主要区别在于上部组块结构本身参与平台的总强度。为准确地反映上部组块在平台总强度计算时的刚度及载荷传递作用,本文采用梁单元对该结构进行实际尺寸模拟,在Sesam相关结构分析模块中建立的平台有限元模型可参见图17。平台下浮体结构甲板、舱壁等主要构件以四节点或三节点板单元模拟,网格大小约0.6 m,部分关键连接区域处局部网格适当加密。另外,为获得相对精确的应力分布,总模型中也包含张力筋腱抱紧器基座(Tendon Porch)以及立柱与上部组块的对接短柱(Mating Post)等局部结构的建模。

图 17 总强度计算有限元模型及板厚示意图
5.3 总强度控制工况分析
通过计算,目标平台主要结构应力结果参见表6,平台下浮体外围壁及内舱壁应力分布参见图18 -图19。
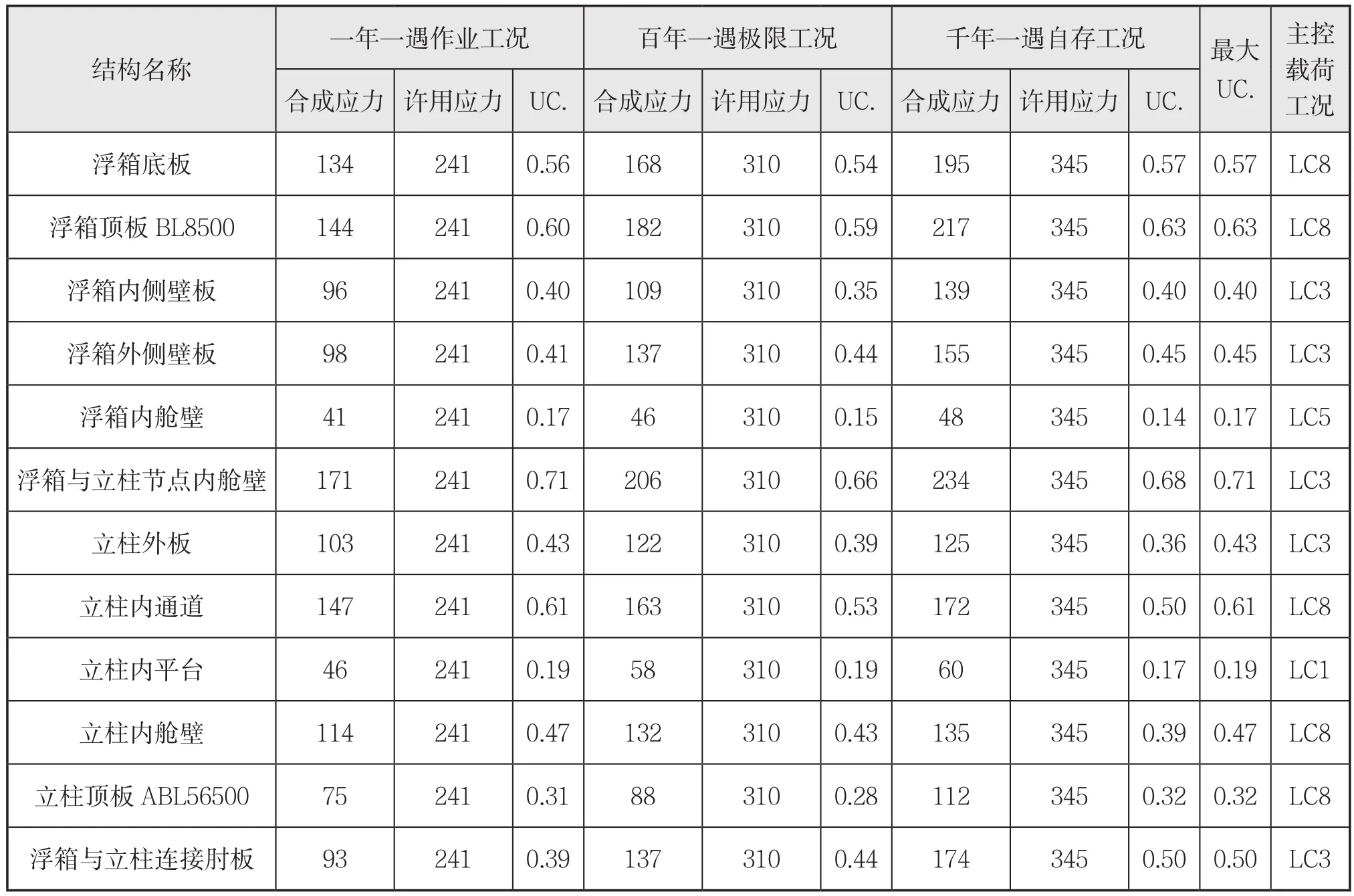
表6 目标平台各海况下的屈服强度校核结果MPa

图18 下浮体外围壁应力分布云图
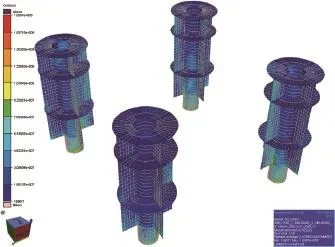
图 19 下浮体内舱壁应力分布云图
通过上述结果可知,从“一年一遇”到“千年一遇”,平台整体应力水平随所受波浪载荷变大而逐步增加。高应力区位于立柱外板张力筋腱抱紧器基座区域,主要由张力筋腱载荷引起;而浮箱与立柱连接肘板以及立柱与上部组块的对接立柱处,则主要因波浪载荷作用下船体变形所致。
下浮体(包括立柱及浮箱)外围壁结构的控制工况为千年一遇自存工况,而其内舱壁及平台构件的控制工况为一年一遇作业工况(与其他作业海况相比,在应力水平相当的情况下,其安全系数较高导致)。控制载荷工况主要是LC3-浮箱最大扭矩及LC8-平台最大对角线分离力。
由于本平台立柱为圆柱形,浮箱为方形,因此本平台屈曲校核分为平板屈曲和曲面板屈曲强度校核,其中曲面板屈曲强度校核结果参见表7。

表7 目标平台各海况下的曲面板屈曲强度校核结果
6 结 论
由于张力筋腱系统的作用,使张力腿平台总强度计算分析相对于常规半潜平台有所区别,因此其结构设计过程中对结构型式、设计载荷、总强度以及疲劳分析都提出更高要求。通过本文研究得出以下结论:
(1)张力筋腱的模拟,是张力腿平台总强度分析的关键。在水动力分析时应通过选取Morison模型中的Tendon单元模拟张力筋腱,以便在水动力求解时模拟其预张力及刚度,同时求解出各工况最终的张力载荷。总强度计算时应注意采取合理的方法将张力筋腱的张力载荷映射到结构模型中,并通过设置合理的弹性刚度模拟张力筋腱对平台的约束作用。
(2)载荷传递路径,从强度计算应力分布不难发现,高应力区主要发生在浮箱与立柱连接肘板,张力筋腱抱紧器基座(Tendon Porch)及立柱与上部组块的对接短柱(Mating Post)区域,因此不难判断张力腿平台主要载荷是波浪载荷、张力筋腱载荷及上部组块重力及功能载荷。这些主要载荷通过以上关键区域在桁架式上部组块,4个圆形立柱和方形浮箱间进行相互传递,且主要承载构件为立柱与浮箱的外围壁及相交内舱壁,因此在设计相关构件时应给予重点关注。
(3)总强度控制工况,虽然平台整体应力水平从“一年一遇”到“千年一遇”,随着所受波浪载荷变大而逐渐增加,但是综合考虑各工况安全系数后,发现下浮体(包括立柱及浮箱)外围壁结构的控制工况为“千年一遇”自存工况,而其内舱壁及平台构件的控制工况为“一年一遇”作业工况。因此,在进行类似平台设计时,在考虑极端工况下主要构件强度的同时,对正常作业工况下的内舱壁相关构件同样应给予足够重视。
[参考文献]
[1]谷家扬. 张力腿平台复杂动力响应及涡激特性研究[D]. 上海:上海交通大学博士学位论文,2013.
[2]Subrata Chakrabarti. Handbook of Offshore Engineering[S]. Elsevier,2005 :501-536.
[3]董艳秋,胡志敏,马驰. 深水张力腿平台的结构形式[J].中国海洋平台, 2000(1):1-5.
[4]ABS. Rules for Building and Classing Floating Production Installations [S]. 2014.
[5]中国船级社.张力腿平台入级指南[S]. 2016.
[6]GADAGI M M,BENAROYA H. Dynamic Response of an Axially Loaded Tendon of a Tension Leg Platform[J].Journal of Sound and Vibration,2006(1,2):38-58.
[7]API. Planning,Designing,and Construting Tension Leg Platforms[S]. 2014.
[8]DNV. Offshore Standard DNV-OS-C105 Structural Design of Tlps[S]. 2005.
[9]BV. Rules for the Classification of Tension Leg Platforms(TLP)[S]. 2012.
猜你喜欢
中国港湾建设(2022年12期)2022-12-28 05:28:30
中国海上油气(2021年2期)2021-06-09 08:13:48
中国海上油气(2021年2期)2021-06-09 08:13:46
海洋工程装备与技术(2020年2期)2020-07-13 07:08:18
天津大学学报(自然科学与工程技术版)(2019年1期)2019-12-21 09:03:36
中国海上油气(2016年1期)2016-06-09 08:58:49
恋爱婚姻家庭·养生版(2015年12期)2015-05-14 17:38:28
长春大学学报(2013年4期)2013-08-15 00:50:03
海南热带海洋学院学报(2012年6期)2012-04-13 03:34:47
船舶与海洋工程(2011年2期)2011-05-07 07:43:04
