真空低温环境下红外笼移动装置设计及调试验证
2018-05-03 03:40:05袁伟峰李日华钱北行
航天器环境工程 2018年2期
袁伟峰,李日华,钱北行
真空低温环境下红外笼移动装置设计及调试验证
袁伟峰,李日华,钱北行
(北京卫星环境工程研究所,北京 100094)
为在航天器真空热试验中方便快捷地实现高、低温工况的转换,设计了红外笼移动装置,高温工况时,将红外笼移至航天器加热面的上方;低温工况时,将红外笼移开。文章以红外笼移动装置的功能、性能需求分析为基础,确定了移动装置的功能模块及设计要求,通过特殊设计使得该移动装置能够克服低温传动失稳或失效问题,并满足真空润滑、电机热控等要求,实际应用表明其具备在真空低温特殊环境下可靠、安全工作的能力。文章最后根据装置的工程应用情况给出了后续改进建议。
真空热试验;红外笼;移动装置;机械设计;控制系统
0 引言
航天器热平衡试验过程中需要模拟航天器接收的空间外热流。如果模拟热流与空间实际值相差较大,会影响平衡温度,达不到热平衡试验的目的[1]。某些航天器热试验中,模拟热流在不同工况下的差异很大,高、低温工况的热流密度值可能相差达到上千W/m2。实践表明,将红外笼从辐射器上方移走,可使试件上的背景热流较快降低[2]。NASA在Apollo服务舱热试验中,为实现高、低温工况的快速转换,专门设计了红外笼提升机构,当红外笼被提升到试件斜上方后,试件表面热流密度可在约90s内从最大的1387W/m2下降到15.8W/m2[3]。
有关红外笼移动装置的功能、性能需求,国内外公开报道中尚未见过完整、专门的分析;而没有准确的功能、性能需求定位,则无法保证移动装置的合理设计。本文专门研究了红外笼在真空低温环境下移动的功能、性能需求,并据此确定了移动装置的功能模块及能力的设计要求,以及各功能模块及系统调试验证的方式,最后给出了系统的应用情况和后续改进建议。
1 功能、性能需求分析
红外笼移动装置主体工作在空间环境模拟器内,在进行航天器热试验的高、低温工况转换时,可将红外笼合拢或移开至航天器表面的规定位置处。随着红外笼移开航天器距离的增加,对于航天器而言,可视为热沉与航天器相对面积的比值(2/1)增大,而由式(1)可知,这将使得航天器与热沉的净换热量n增大,即意味着航天器表面的温度将降低[4]。

式中:为面积,m2;为发射率;下标1和2分别代表航天器和热沉;为斯忒藩−玻耳兹曼常量。
红外笼的基本移动方式包括垂直提降、水平移动2种,在有限空间的环境模拟器内,一般应选择最利于红外笼移开、实现更远移开距离的方式。实际应用中可能还面临其他方向(如倾斜方向)的移动需求,可基于2种基本方式变化得到。
红外笼移动装置的需求主要包括:1)为保证试验效率和节省试验经费,移动装置一次安装后应能满足全部试验工况的热流模拟,即系统应能实现红外笼的多次移开或合拢,中间不能停止试验;2)为方便各个工况的热流模拟参数施加和数据比对,红外笼移开或合拢后的位置应保持一致,即红外笼移动到位的位置应准确,每次合拢(或移开)到位的位置误差应小于5mm;3)为最大程度降低背景热流,应能将红外笼移开至最远,并有效降低装置的热辐射;4)为模拟航天器在轨工况转换的实际状态,要求红外笼在1~2min或更短的时间内移动到位,即移动装置应保证一定的移动速度。
鉴于上述需求,红外笼移动装置应具有足够的可靠性和安全性,且至少能够支持一次完整的大型试验,系统应包含动力模块、传动模块、热控模块以及控制模块,参见图1。控制模块可实时监控红外笼移动的速度、位置及到位情况,并根据这些参数反馈向动力模块发出指令,由动力模块通过传动模块驱动红外笼移动;同时,控制模块可根据热控模块的温度参数反馈,实时调节热控模块的参数输出,将动力模块和传动模块的温度控制在规定的范围内。

图1 红外笼移动装置的功能模块组成
2 功能模块设计
2.1 动力模块设计
动力模块是为红外笼提供移动动力源的电机装置,在使用上有其特殊环境或限制条件:首先,电机装置在空间环境模拟器内距离航天器产品较近,安装空间受限,应选用小体积的电机,这样便于安装并可减小对试件的热辐射影响。其次,电机装置的工作精度应满足红外笼在反复移动时准确到位的要求。此外,在水平移动红外笼时,为了避免多余物,一般不对移动轮进行润滑处理,而由于导轨变形等因素的存在,电机需要克服的摩擦力较大,可能达到几百N;在垂直提升红外笼时,需要克服的载荷更大,甚至达到上千N,这就需要电机有较大的扭矩输出。最后,在真空环境下,运动物体间的摩擦系数会急剧增大,步进电机需要的推动力随之增大,若真空润滑处理不到位,可能导致控制电机的输出转矩无法满足使用要求,使机构无法工作。为了保证电机内部转动、传动部件的工作稳定,在其内部添加了润滑油,一旦密封不好可能导致对航天器产品的油污染,且在真空环境下,润滑油还会在电机内、外压差的作用下,通过各种间隙以油蒸气的方式被抽走[5],加剧污染,因此,必须对电机的润滑方式进行改造,将润滑油改为难以挥发的真空专用润滑脂。
综上,电机选型设计应满足结构紧凑、大扭矩输出、高精度、高稳定、无挥发油物且能有效润滑等要求。步进电机是一种将电脉冲信号转换为角位移或直线运动的执行机构,无位置积累误差,通过特有的开环运行机制即可获得接近闭环控制的良好性能,其中的混合式步进电机兼有反应式和永磁式电机的优点,即体积小、扭矩大。在对电机进行除油处理和加注真空润滑脂,并采取针对低温环境的热控措施后,混合式步进电机能够较好地满足在空间环境模拟器内使用的要求。
步进电机的驱动转矩为[6]
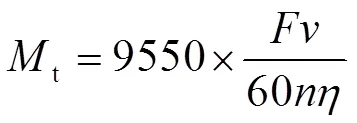
式中:为移动机构的牵引力,kN;为移动速度,m/min;为电机转速,r/min;为移动机构传递总效率。
2.2 传动模块设计
2.2.1 系统组成及传动方式
传动模块是为红外笼传递移动动力源的机械装置,一般采取链传动或绳传动。链传动由减速器、传动链轮(主动链轮和从动链轮)、传动链条及其保护装置等组成,见图2。绳传动则由减速器、卷绳器、钢丝绳及滑轮组(后者可选)、保护装置等组成,见图3。这2种传动方式可分别应用在不同的移动场合,在垂直提升红外笼时,使用具有足够强度的钢丝绳牵拉红外笼即可;而在水平移动红外笼时,链传动更具优势——与绳传动相比,它无弹性滑动和打滑现象,平均传动比准确,过载能力强,相同工况下的传动尺寸小,所需张紧力小,作用于轴上压力小。

图2 链传动示意
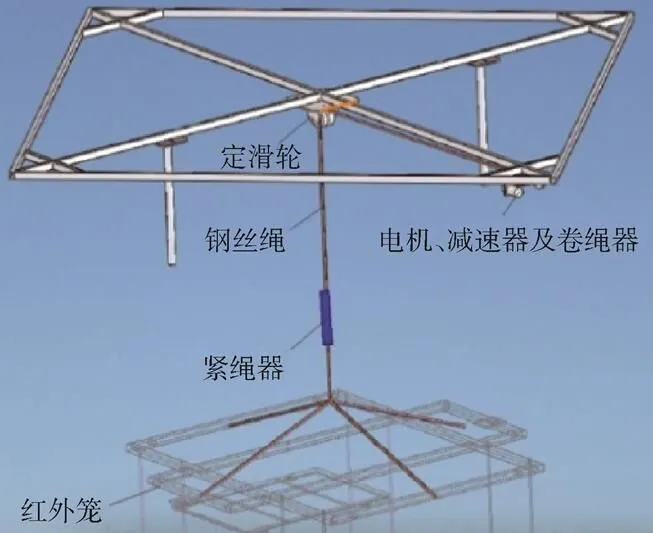
图3 钢丝绳传动示意
2.2.2 传动主要部件设计
1)卷绳器
卷绳器一般设计为长滚筒形式,其设计参数包括滚筒直径和长度。可先依据红外笼提升速度和滚筒转速的比值确定滚筒直径,再依据滚筒容绳量计算出滚筒长度。卷绳器的容绳量一般为传动绳单倍行程变化值的1.1~1.2倍;如果采取了动滑轮,则应为双倍行程变化值的1.1~1.2倍。卷绳器可选用铝材制作以减轻重量,并在其表面设计卷绳缠绕用的凹槽以方便收(放)绳。
2)减速器
为了保证红外笼的移动速度和到位精度,需在电机输出轴端配置减速器。精密行星伺服减速器是用于专业数控工业设备的减速器,具有体积小、刚性好、传递扭矩大、传动精度高、回差小等优点,被广泛应用于要求结构紧凑的动力传动系统中。其同样适用于红外笼移动装置,但需要进行适应真空低温环境的处置,包括使用前的除油和真空润滑脂加注,以及使用过程中的温度控制。
3)传动链轮
链轮分为主动链轮和从动链轮,均选用不锈钢材料以适应低温环境。由于链式传动特有的正多边形效应,链轮的转速越高、节距越大、齿数越少,则传动的动载荷就越大,冲击越强烈,易出现跳齿、脱链现象[7]。实际使用中,为防止脱链和运动冲击,链式传动一般采用小节距的等比传动。从动链轮滑动轴承的轴选用不锈钢材料,轴套选用黄铜材料,轴套和链轮过盈配合,轴与轴套加工至较高光洁度,轴套内表面刻油槽。
4)传动绳(链)
传动钢丝绳一般选用无油、防扭的不锈钢材。传动链条一般选用无油不锈钢滚子链条,节距与链轮相匹配。传动绳(链)的强度应有足够的安全余量,安全系数一般不小于5;考虑低温下的收缩变形,长度亦应有一定的余量,具体可通过地面调试确定。由于传动绳(链)在低温环境下使用,故在地面调试前应对其进行液氮浸泡试验。
5)保护装置
保护装置主要有绳传动时的张紧器(紧绳器)、夹紧器,链传动时的张紧器、防掉器,以及传递红外笼移动到位或系统工作故障信号的行程开关。
张紧器(紧绳器)的内部结构为弹簧。在绳传动时,一旦牵引力有变化,利用张紧器可使钢丝绳保持一定的张力,以防止卷绳器端因钢丝绳的松动而脱槽;在链传动时,由于链条比较接近红外笼,在高、低温工况时,上、下链条温度不均匀且变化,使链条长度发生变化,利用张紧器可使链条保持与地面调试时同样的张紧状态。如图4所示,链轮传动张紧器采用弹簧螺杆式张紧装置,其中的弹簧位于张紧器底座与螺杆之间,从动轮依靠弹簧提供的张紧力。在对从动轮的位置进行调整时,使张紧器承受一定程度的预紧力,只需要拧动螺杆,调整弹簧的压缩量就能带动从动轮前进/后退,达到对张紧力的调节。夹紧器选用与钢丝绳直径匹配的不锈钢夹紧器,为了确保安全,一般要求每个固定端并排设置2个夹紧器。链条防掉器是用来防止链条掉落在航天器表面的,它有2种方式:一种是防掉套,当链条一旦在运行过程中意外脱开链轮时起承接作用;另一种是防断螺钉,其用处在于当链条意外断开时,安装于从动链轮上的张紧器因卸载而弹簧收缩,从动链轮及其链条迅速后退并顶入后方的防断螺钉,将链条牢牢卡住(参见图2)。
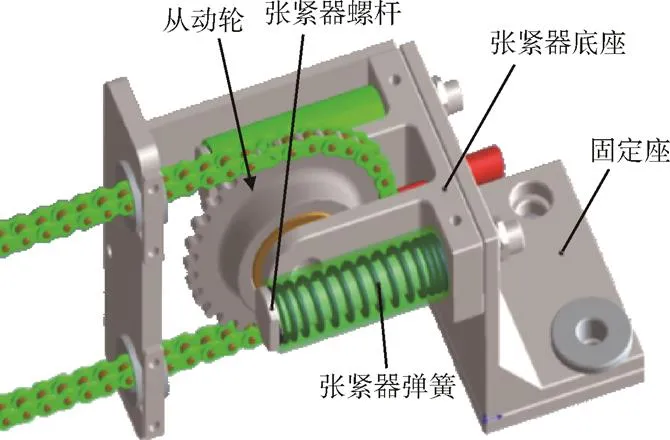
图4 张紧器布局
行程开关应选用能耐受真空低温环境的开关器件,并在使用前对开关内部进行去油等清洁处理;同时,为防止开关在低温下冻结,在正式使用前还应对其进行液氮浸泡考核。由于行程开关提供的信号直接影响系统的状态,为可靠起见,应冗余布置,防止单点失效。
2.3 热控模块设计
电机、减速器面对的工作环境温度为100K左右,已经超过了其常规工作温度范围,因此,需采取热控措施来保证其正常工作。可设计一个大小适宜的铝合金控温罩及其热控装置(见图5),将电机、减速器等罩入其中,再通过空间环境模拟器外的温控仪将控温罩内的温度控制在-5~15℃范围内,以保证电机、减速器的正常工作。控温罩内表面涂覆高发射率(红外发射率>0.85)黑漆,以加强控温罩和电机等的热辐射交换;在控温罩外表面粘贴足够功率的薄膜加热片和温度传感器,并包覆热控多层。热控多层的规格和包覆面积、加热片的功率规格则依据控温罩的热负荷确定。在计算控温罩热负荷时,还应考虑电机工作产生的废热;在真空环境下,电机废热应注意及时释放,以免电机温度过高影响正常工作。

图5 热控装置布局
2.4 控制模块设计
控制模块分成2大部分(见图6),一是通过温控仪实现对电机、减速器的温度控制;二是通过PLC给电机驱动器发送指令脉冲从而控制电机带动传动装置工作。
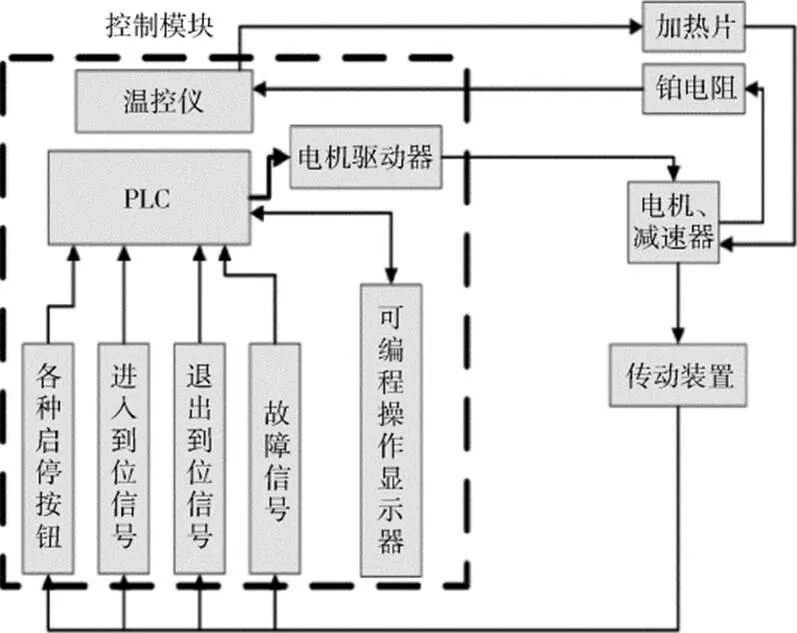
图6 控制系统组成
控制装置界面见图7,有手动和自动2种控制方式,其中手动控制方式设有“进入”和“退出”2个按钮,分别控制红外笼合拢和移开,按钮按下时电机转动,按钮抬起时电机停止。自动控制方式与手动控制方式共用“进入”和“退出”按钮,按钮按下时驱动机构自动按要求运行到位。驱动机构运行到位的信号是分别由“进入到位”“退出到位”和“链条故障”(或“绳松”)3个行程开关的常开触点闭合来发出的。“进入到位”“退出到位”行程开关发出信号时,电机按设定的斜率减速至停止。“链条故障”(或“绳松”)行程开关闭合时,电机立即停止。驱动机构控制系统的电路设计和布线工艺设计,须同时考虑EMC问题。电机驱动、控制和加热回路共用1条电缆,各回路之间不得相互干扰。

图7 控制装置界面
3 调试方式
装置总成以后,需进行调试验证。调试方式包括常温调试和真空低温调试。实践表明,常温调试可作为主要手段,真空低温调试则应视装置的设计成熟度和常温调试情况选择进行。
调试目的包括:1)考核传动模块工作的平稳性;2)考核红外笼在相应移动速度下的到位准确性;3)考核电机、温控装置、控制模块和保护装置的工作状态;4)确定各模块部件的安装参数,包括电机安装位置、链轮安装位置、钢丝绳(链条)工作长度及行程开关位置。
调试工况应覆盖全部使用工况和各种故障模式(传动卡滞、失稳、红外笼不能准确入位等)工况,对于垂直提升方式,还要充分考核装置的悬挂性能。
4 装置应用情况
红外笼移动装置已在“嫦娥三号”着陆器初样、正样热试验中进行了应用,其工作情况详见表1。试验期间,电机和减速器均持续工作在适宜的温度范围内,保持了良好的工作性能,传动模块未出现卡滞、大幅晃动、脱绳(链)等故障情况,实现了红外笼移动过程的平稳;控制系统以自动和手动2种模式互相配合,实现了对红外笼移动状态的有效监控,满足了红外笼的典型移动需求。

表1 红外笼移动装置工作情况
5 结束语
从目前的应用情况来看,红外笼移动装置已较好地解决了航天器外热流模拟时高、低温工况难以兼顾的问题,在服务于深空探测类等空间热流变化明显的航天器热试验时,发挥了重要作用,体现了其工程应用价值。
整个装置虽然并不复杂,但由于是在严酷的真空低温环境下工作,所以,设计面临着特殊条件,如运动部件润滑、安装空间、结构低温变形或部件低温失效、距离航天器表面较近等实际限制,需要开展详细的可靠性、安全性设计和充分的调试验证,在确保装置足够可靠、安全后再正式服务于型号试验。
本文所设计的装置提供了水平移动和垂直提升2种移动模式,在实际使用中,还会面临红外笼斜向移动或翻转等应用需求,可根据实际需求在本文中钢丝绳或链条这2种传动方式的基础上实现其运动,特别是钢丝绳传动方式,能更好地适用于后续新增的使用模式,可重点开展研究。
[1] 杨晓宁, 孙玉玮. 利用红外加热笼进行低热流模拟的设计方法研究[J]. 航天器环境工程, 2007, 24(6): 374-376
YANG X N, SUN Y W. Simulating low flux on spacecraft surface by using infrared heating cage[J]. Spacecraft Environment Engineering, 2007, 24(6): 374-376
[2] 裴一飞, 王晶. 航天器真空热试验中附加热流的分析及对策[J]. 航天器环境工程, 2012, 29(4): 409-413
PEI Y F, WANG J. Analyses of and countermeasures on additive heat flux simulators during spacecraft vacuum thermal test[J]. Spacecraft Environment Engineering, 2012, 29(4): 409-413
[3] 马有礼, 景甫林. “嫦娥一号”月球探测卫星真空热试验的初步思路[J]. 航天器环境工程, 2004, 21(2): 1-7
[4] 侯增祺, 胡金刚. 航天器热控制技术——原理及其应用[M]. 北京: 中国科学技术出版社, 2007: 421-423
[5] 林雪松, 王立朋, 王淑荣. 空间光学调制器中轴承的润滑及密封研究[J]. 润滑与密封, 2007, 32(4): 136-139
LIN X S, WANG L P, WANG S R. Research on the bearing lubrication and sealing of the optical modulator in space[J]. Lubrication Engineering, 2007, 32(4): 136-139
[6] 涡轮螺杆升降机型式、参数与尺寸: JB/T 8809—1998 SWL[S], 1998
[7] 冉绍伯. 链传动动态特性参数测试及实验研究[D]. 成都: 西南交通大学, 2011: 25-27
(编辑:张艳艳)
Design and validation of an infrared heating cage translator used in the simulated space cryogenic vacuum environment
YUAN Weifeng, LI Rihua, QIAN Beixing
(Beijing Institute of Spacecraft Environment Engineering, Beijing 100094, China)
The infrared heating cage translator is designed for the high or low heat flux simulation in the spacecraft thermal vacuum test. With it, the infrared cage can be moved to the top of the heating surface of the spacecraft under high heat flux conditions, or removed under low flux conditions. This paper, based on the analysis of the requirement of the system functions and properties, describes the functional blocks and the design requirements of the translator of the infrared heating cage. The translation device of the infrared heating cage, by a special design, works well without the risks of losing stability or failing in the cryogenic environment, or leading to poor lubrication under vacuum, or overheating of the electric motor. In practical applications, this system is shown to enjoy enough safety and reliability in the simulated space environment.. Some suggestions for improvement in further applications are presented lastly.
thermal vacuum test; infrared heating cage; translator; mechanical design; control system
V416.5
B
1673-1379(2018)02-0184-06
10.3969/j.issn.1673-1379.2018.02.014
袁伟峰(1975—),男,硕士学位,高级工程师,主要研究方向为航天器总装与环境试验技术。E-mail: 13391751092@189.cn。
2017-11-15;
2018-03-26
YUAN W F, LI R H, QIAN B X. Design and validation of an infrared heating cage translator used in the simulated space cryogenic vacuum environment[J]. Spacecraft Environment Engineering, 2018, 35(2): 184-189
猜你喜欢
江苏安全生产(2023年11期)2023-12-14 12:05:26
真空与低温(2022年6期)2023-01-06 07:33:20
物流技术与应用(2022年8期)2022-08-26 04:10:54
国际太空(2022年7期)2022-08-16 09:52:50
物流技术与应用(2020年4期)2020-05-06 03:31:28
国际太空(2019年9期)2019-10-23 01:55:34
国际太空(2018年12期)2019-01-28 12:53:20
国际太空(2018年9期)2018-10-18 08:51:32
中国自行车(2018年8期)2018-09-26 06:53:30
制造技术与机床(2017年3期)2017-06-23 08:11:52