一级倒立摆的μ分析和μ综合研究
2018-05-02 03:42:13张义辰
机电工程 2018年4期
张义辰
(上海理工大学 机械工程学院,上海 200093)
0 引 言
单级倒立摆是倒立摆系统中形式最简单的一种模型,具有非线性性、不稳定性等特性,常被作为研究非线性控制、鲁棒控制、最优控制、自适应控制等问题的经典模型。鲁棒控制问题作为先进控制问题的典型代表,其中的H∞控制理论、H2控制理论、滑模控制理论等都是解决这类问题的经典理论,近年来成为控制领域研究的热点。
关于控制算法保守性问题的分析与处理,学术界做了相当多的研究。李炜等[1]在新模型中引入时延下界,并且在证明过程中略去了模型转换和交叉项放大等环境,引入了适当的自由权矩阵,解决了鲁棒控制结果的保守性,并与传统的LMIs算法相比较,揭示了传统方法的保守性;马静等[2-3]重点从原理分析与公式推导方面说明了由于寻求公共Lyapunov矩阵而带来的鲁棒控制的保守性,并分别基于积分滑模控制和多面体不确定性区间震荡控制方法改进了鲁棒H2/H∞控制的保守性;杨忠[4]从模糊时滞系统出发,重点研究了如何在稳定条件下降低保守性的问题,提出了保成本控制条件、针对时变时滞模糊系统的保守性减小方法和区间变时滞模糊系统H∞控制的保守性减小方法;林庆强[5]则研究了不确定线性时滞系统H∞控制的保守性减小修正方法;PFIFERH等[6]则使用积分二次型约束进行了线性时变系统低保守性鲁棒性能分析,从实验结果上证实了保守性的降低。这些方法的共同之处在于都是通过一种新的方法或理论来规避原方法的保守性,力求通过其他算法的优势来弥补这一劣势,但是都没有真正从传统算法本身来修正该算法,降低保守性。然而,从老方法入手解决保守性问题,使得修正方法的可操作性明显增强,省去了新理论的理解和复杂公式的推导,降低了难度,提高了效率。因此,研究控制方法本身的保守性修正问题很有必要。
本文将提出应用结构奇异值的理论来解决H∞控制的保守性问题,即对一级倒立摆系统进行μ分析和μ综合(对文献[7-8]总结出的倒立摆模型作适当处理)。
1 系统描述
一级倒立摆系统的示意图如图1所示。

图1 一级倒立摆系统
该系统的的输入信号u包含倒立摆期望角位移和台车期望水平位移两部分;干扰w主要包含摩擦、振动、冲击等;输出信号y包含倒立摆的实际角位移、台车的水平实际位移;驱动元件主要是台车的驱动电机;力位转换器主要负责将输入的位移信号转换成力或者力矩信号;反馈控制器为负反馈控制器,由具体的控制算法求得。整个系统实际为轨迹跟踪系统,跟踪性是它的重要性能指标。
简化模型可以写成如下的形式:
(1)

(2)
u=u(t),w=w(t)
(3)
时变系数矩阵A和B主要受极点摩擦系数c和倒立摆摆杆质心位置l的影响,这两个不确定参数的摄动是有界的、随机性的,按照不确定参数的标准形式可表达为:
c=c0+kcd,kc=cmax-cmin
(4)
l=l0+kld,kl=lmax-lmin
(5)
式(4~5)中:c—极点摩擦系数;c0—极点摩擦系数基准值;l—摆杆质心位置,m;l0—摆杆质心位置基准值,m;kc,kl—权重系数,kc、kl∈R;δ—不确定函数,δ∈[-1,1]。
为了进一步简化模型,降低研究的复杂程度,特将参数l确定为基准值l0,参数c不变,那么原模型就变成了只含有一个摄动参数c的系统模型,矩阵A的变化和参数l无关,而矩阵B1和B2变为常数矩阵,具体的形式如下:
(6)
(7)
式中:m—摆杆质量,kg;M—台车质量,kg;g—重力加速度,取9.8 m/s2;Ra—电枢电阻,Ω;KT—电机力矩系数,Nm/A;KE—反向电势系数,Vs/rad;r—台车驱动轮半径,m;Kg—齿轮比;J—转动惯量,kg·m2。
人为定义不确定参数c的范围为[-0.6,0],基准值为-0.3,将此基准值代入式(6)中,并结合文献[11]第4部分的已知参数,矩阵A的标称矩阵A0、干扰输入矩阵B1、输入矩阵B2的具体形式为:
进一步可得到系统的标称形式为:
(8)
2 无扰状态下的标准H∞控制
H∞控制是通过控制系统在最坏情况下的最大幅值来增强不确定系统鲁棒性的方法,这种方法的性能指标是不确定系统的最大奇异值,即系统的H∞范数。实际应用表明,几乎所有的H∞控制问题都可以转化为标准H∞控制问题[9],并可遵照下述结构图求解,模型如图2所示。
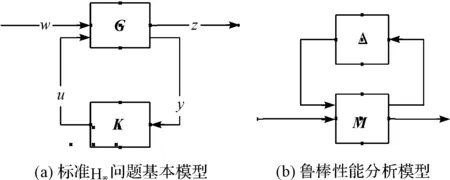
图2 系统的鲁棒分析基本模型
标准H∞控制问题如图2(a)所示。图2(a)中的G和K为已知的控制系统和待求的控制器;w,u,z,y分别代表有限维的外部输入、控制输入、被调输出和测量输出。标准H∞问题就是要寻找一个控制器K,使得闭环系统内部稳定,并且让被调输出z和外部输入w间的传递函数Tzw的H∞范数取得最小值,总的来说就是求解问题,即:
(9)
求解这一问题,具体可以通过求解代数黎卡提方程或者求解线性矩阵不等式组来完成。求解标准H∞控制问题,从另一个角度来考虑,主要是运用了小增益定理,即保证:
‖G(jω)K(jω)‖∞<1
(10)
本例中采用LMI方法求解这一问题,无扰状态下控制器的具体求解过程可参见文献[10],这里给出求解结果:
K0=[539.939 7,126.341 2,143.245 1,61.453 7]
(11)
需要指出的是,小增益定理(10)是使系统具有鲁棒稳定性和鲁棒特性的最低条件,这一条件实际上可以等效地表示成:
(12)
即系统的最大奇异值不超过1,这就使得算出的标准H∞控制器不一定是最优控制器,从而使结果产生一定的保守性,这种保守性会让优化后的系统不能真正达到性能指标的最优值,影响最终的控制效果。因此就需要一种方法来直观地描述这种保守性,同时需要另一种方法来降低或者消除这种保守性。
3 一级倒立摆μ分析
3.1 μ分析方法
一级倒立摆的μ分析是以系统的结构奇异值理论为基础提出的,结构奇异值衡量系统结构不确定性大小的一种值。确切地说,它是对使反馈系统不稳定的最小结构不确定性的一种量化处理,也是反馈系统本身稳定裕度的倒数。对于具有如图2(b)所示的系统结构,其结构奇异值μΔ[M(s)]的形式为:
(13)
式中:Δ—快对角结构不确定性。
与系统的最大奇异值σmax(M)相比,结构奇异值μΔ(M)介于谱半径ρ(M)和σmax(M)之间,即:
ρ(M)≤μΔ(M)≤σmax(M)
(14)
用结构奇异值μ来分析系统鲁棒性时,常常将系统的各个结构性的不确定量汇总在一起,形式如同图2(b)中的不确定性Δ,是一个块对角结构。其中,M通常为已知系统G和已求控制器K的线性分式变换,即:
(15)
式中:M,M11,M12,M21,M22—广义系统及其子块;G—已知系统的传递函数;K—反馈控制器;Fl(·,·)—下线性分式变换。
该式实际反映了系统本身的鲁棒稳定性,而系统M与不确定性Δ之间的线性分式变换又实际反映了系统的鲁棒性能大小,是鲁棒稳定性与鲁棒特性的统一:
Fu(M,Δ)=M22+M21Δ(I-M11Δ)-1M12
(16)
式中:Fu(·,·)—上线性分式变换;Δ—不确定块。
此时判断已知系统是否满足小增益定理,只需保证:
supμΔ(M)≤1
(17)
该条件要比单纯的使用‖G(jω)K(jω)‖∞<1,即系统的最大奇异值σmax≤1要严密的多,故而弥补了一般方法保守性的缺点。
对不确定系统进行μ分析,通常是结合系统的具体形式,绘制出系统的结构奇异值μ随频率ω变化的曲线,该曲线能直观地反映系统结构不确定性因素的变化范围,变化趋势、平均变化水平等信息,对于判断系统是否稳定、分析系统鲁棒特性、评价控制方法优劣性很有帮助。
3.2 一级倒立摆的μ分析
鉴于μ分析方法在评价控制方法优劣性方面的优势,本例尝试采用该方法来分析倒立摆系统,以便确认H∞控制的保守性。本研究先利用Matlab中的frd函数(频响函数)将系统改写成频响函数的形式;再使用函数mussv(计算结构奇异值)计算系统在不同频率值下的μ值的上界和下界,然后提取上界值,绘制上界值随频率ω的变化曲线,即μ分析曲线;最后计算系统的H∞范数,将其作为常函数,和μ分析曲线画在同一坐标系内。
绘制结果如图3所示。
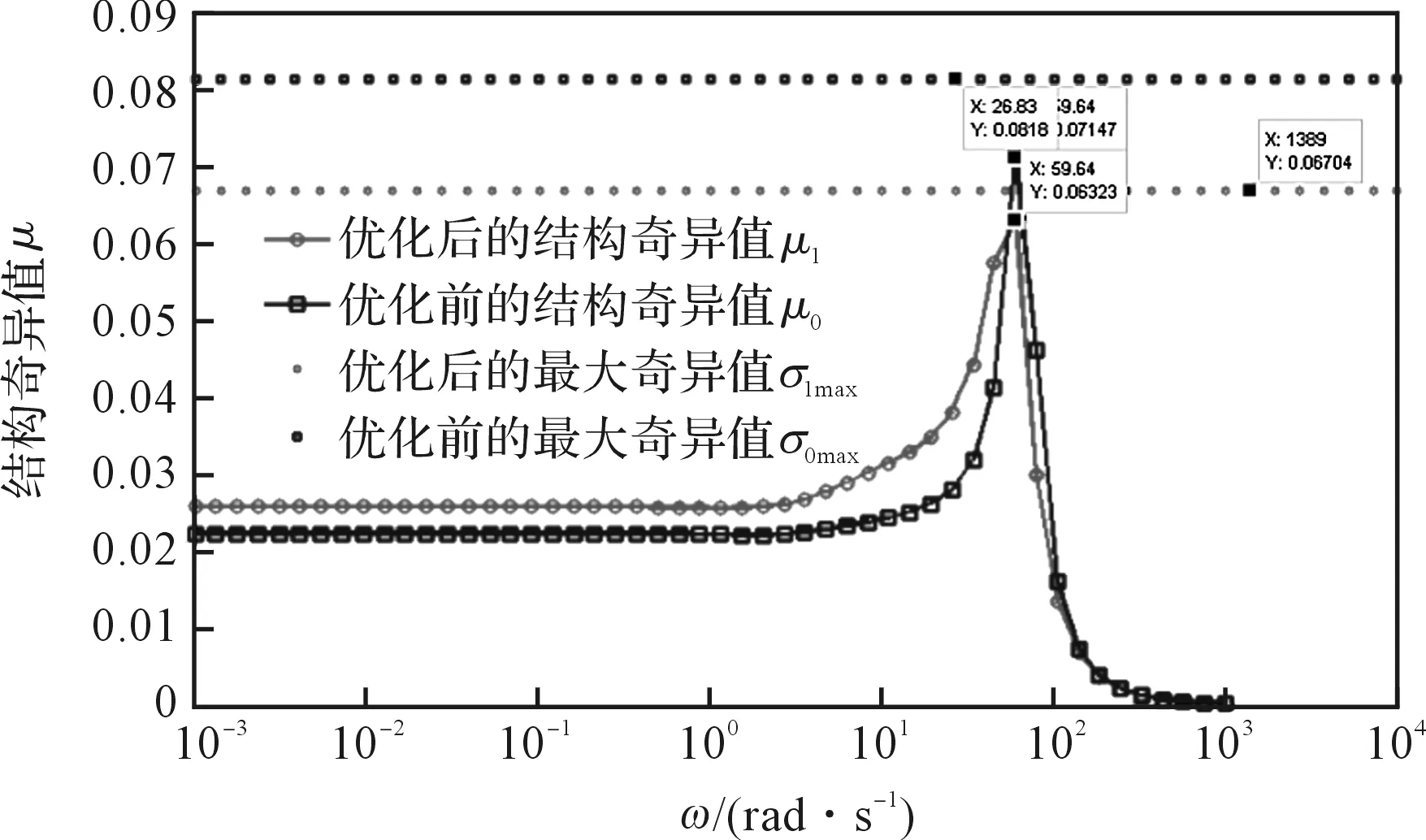
图3 修正前后系统的μ分析图带“□”标记的实线—修正后系统的最大奇异值σ0max;“□”标记—修正后系统的结构奇异值μ0;带“○”标记的实线—修正后系统的最大奇异值σ1max;“○”标记—修正后系统的结构奇异值μ1
由图3可以看出:经标准H∞控制方法优化后的系统,其结构奇异值的峰值和最大奇异值直接存在一定的间距,这表明实际求出的控制器K0并不是问题真正的最优解,结果存在保守性。
4 不确定系统的μ综合问题
文献[9]表明:修正原算法以降低或消除保守性这一问题可以转化为不确定系统的综合问题。
D-K迭代法是解决系统综合问题的一种有效方法,它的主要思路是运用矩阵对角放缩的方法来计算的上界,同时得到满足这一上界的最优控制器。对于一个满足式(7)的广义系统M,首先固定一标度矩阵D,求解标准H∞控制问题[11]:
(18)
求取最优控制器K,再固定控制器K,求解关于D的凸优化问题:
(19)
获得新的标度矩阵Dk再以此为起点进行迭代计算,直至计算前后的两个标度矩阵差距足够小,便可求出修正的最优控制器Kopt。在初次求解时,初始的标度矩阵D0可确定为单位矩阵I,求解过程中,需要在每一步迭代计算完毕后对修正系统进行分析,检查结构奇异值是否满足公式(17),若条件满足则继续迭代,若条件不满足,则表明原系统无解。
在Matlab中应用D-K迭代算法设计控制器,主要是LMI工具箱和最优化函数fmincon交替使用,具体步骤如下[12]:(1)设D0=I,使用LMI工具配合最优解函数mincx求解标准H∞问题,求出最优解K0,并使用mussv函数计算优化系统的结构奇异值μ0;(2)将K0固定,标度矩阵Dk定为未知量,使用fmincon函数计算最优解Dopt;(3)检验‖Dopt-Dk‖是否小于给定值,比如1e-7,若条件满足则终止迭代,若不满足则返回步骤(1)重新计算。
值得注意的是,虽然使用该方法求出的最优解K并非全局最优解,但它对控制器本身的修正效果以充分的降低了保守性。基于上述方法,对本例中的控制器K0进行μ综合修正,经过一次迭代,最终求出修正之后的控制器可行解矩阵:
Kopt=[466.47,93.97,117.96,52.30]
5 验证分析
修正控制器的验证主要分3个方面:(1)通过μ分析检验标准H∞控制解的保守性是否得到了降低或者消除,评判标准主要是看修正后优化系统的μ曲线的峰值与最大奇异值是否重合或者距离在允许范围内;(2)观察控制器修正前后,优化后的倒立摆系统的控制性能有无变化,这主要从摆的镇定性和摆连接体的位移跟踪特性两方面检验,若两种特性无明显变化,则说明修正方法对系统的控制性能无较大影响;(3)比较控制器修正前后,倒立摆系统的输出信号的评价指标有无变化,若指标值变化不大或比修正前小,则说明修正后的控制器对系统控制无影响或有所改善。
5.1 有效性验证
观察图3可以发现:修正前系统的最大奇异值和结构奇异值相差0.010 33,修正后这两值相差0.003 81。以上结果表明:修正后的控制器,其保守性有明显的降低,证明修正方法有效。
5.2 仿真输出结果验证
本研究利用Matlab/Simulink参照式(1)搭建仿真模型,使用与有关文献中相同的输入信号进行仿真,仿真系统结构图和仿真结果如图4所示。
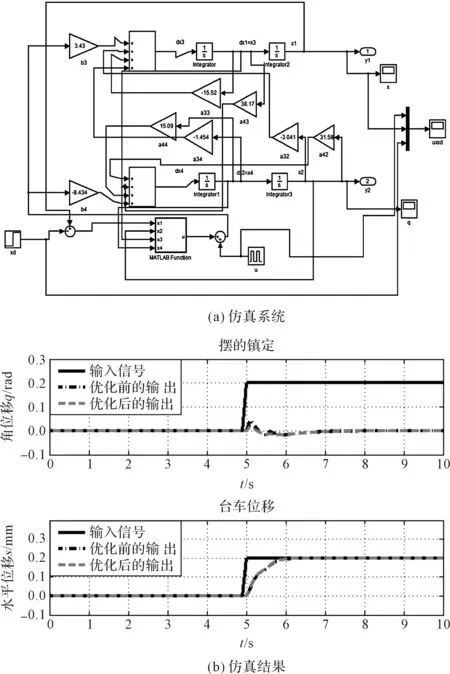
图4 仿真系统和仿真结果实线—输入信号;点划线—修正前系统的控制效果;虚线—修正后系统的控制效果
观察图4可以发现:修正后,摆的镇定效果和摆连接件的位移调节效果略好于修正前,说明了修正后的方法保守性有了改善;这一结果在如表1所示的仿真实验数据上也能得到体现。
对仿真原始数据进行抽样后得到的数据如表1所示。
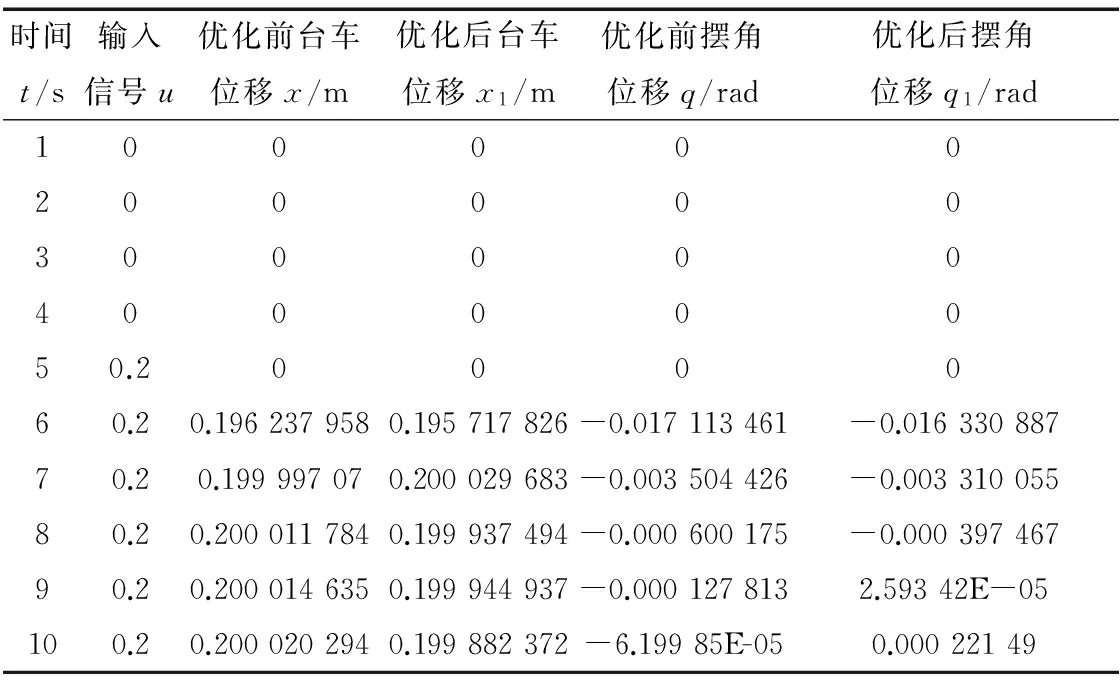
表1 优化前后的仿真实验数据对比
由表1可以看出:优化后的摆角位移比优化前更接近0,摆的镇定效果略有改善,进一步从仿真结果说明了原方法优化后保守性的改善。
计算文献[7]第5部分提出的摆的镇定和台车位置调节两个评价指标,当使用传统方法的控制器K0优化系统时,摆的镇定评价值V11=0.418,台车位置调节的评价值V12=2.205 6;使用综合方法的控制器Kopt优化系统时,摆的镇定评价值V21=0.393 1,台车位置调节的评价值V22=1.971 8。显然,控制器修正后的输出评价值略好于修正前,说明了新方法在降低保守性的同时对系统的输出指标略有改善。
5.3 不同H∞算法的μ特性比较
本文研究的是H∞控制的最优算法,对该最优算法进行μ综合保守性分析,还有一个重要的步骤就是将它们与不同干扰抑制水平γ的次优H∞控制算法作比较,重点观察它们在μ曲线上的变化。为此,分别取γ=3、2、1、0.7设计倒立摆的H∞次优控制器,连入原始系统进行4次μ分析,绘制4条μ曲线,与μ综合算法优化前后的两个最优控制系统的μ曲线作比较。不同H∞算法的μ特性如图5所示。
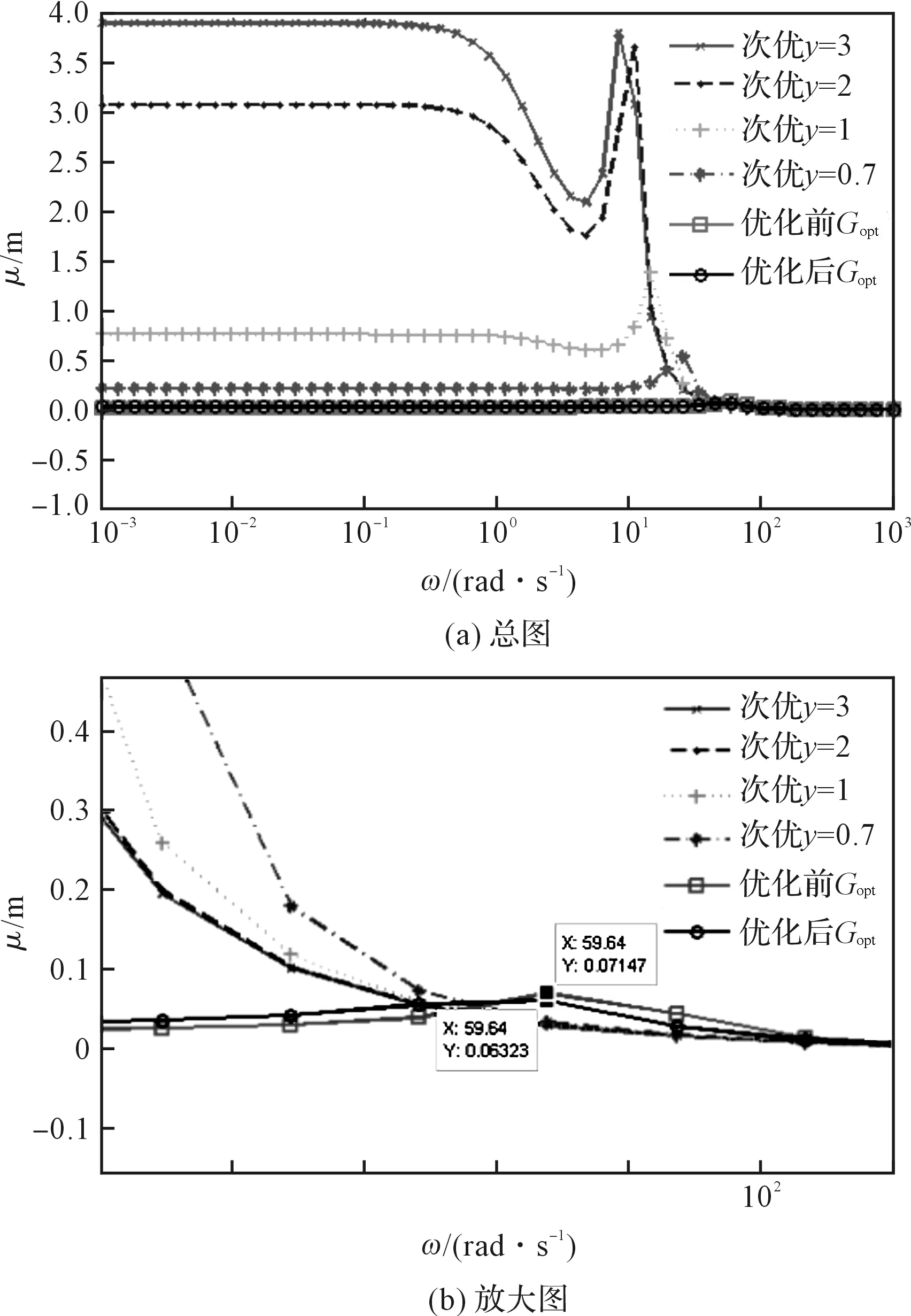
图5 不同H∞算法的μ特性
观察图5(a)可以发现:随着γ值的减小,系统在不同频率下的μ值也相应下降,其中μ值的峰值下降最为明显;次优算法与最优算法间更清晰比较可由图5(b)看出:经过优化后的最优系统其μ值最小,与优化前的最优控制系统相比,对不确定因素的抑制水平更高,进一步揭示了优化前最优算法的保守性,证明了μ综合方法对降低这一保守性所发挥的作用,该优化方法合理有效。
6 结束语
本文将μ分析和μ综合理论应用在倒立摆的H∞控制问题中,从结构奇异值的角度来考虑这一问题,有效地修正了单纯利用小增益定理来设计控制器的缺陷,弥补了传统H∞最优控制方法的不足,降低了保守性,改善了系统的控制性能和输出质量。
同时,在运用D-K迭代法求解μ综合问题时,本文使用最优化函数fmincon来求解形如式(19)的凸优化问题,结果表明,该方法新颖、效果良好。
参考文献(References):
[1] 李 炜,王艳飞.少保守性网络化控制系统鲁棒保性能容错控制[J]兵工学报,2012,33(2):170-178.
[2] 马 静,郭 锐,王玉慧,等.基于积分滑模控制的广域阻尼鲁棒控制策略[J]电网技术,2013,37(2):362-365.
[3] 马 静,郭 锐,王 彤,等.基于多面体不确定性和降低保守性的鲁棒H2/H∞控制策略[J].电网技术,2012,36(9):102-106.
[4] 杨 忠.模糊时滞系统稳定性条件保守性减小研究[D].上海:上海交通大学机械与动力工程学院,2009.
[5] 林庆强.不确定线性时滞系统具有低保守性的H∞控制器设计[D].哈尔滨:哈尔滨工业大学机电工程学院,2012.
[6] PFIFERH, SEILERP. Less conservative robustness analysis of linear parameter varing systems using integral quadratic constraints[J].InternationalJournalofrobustandnonlinearcontrol,2016,26(16):3580-3594.
[7] 袁性忠,姜新建.基于滑模变结构的倒立摆系统稳定控制[J]控制理论与应用,2004,21(5):720-723.
[8] 申铁龙,梅生伟,王 宏,等.鲁棒控制基准设计问题:倒立摆控制[J]控制理论与应用,2003,20(6):974-975.
[9] 吴 敏.现代鲁棒控制[M].长沙:中南大学出版社,2006.
[10] 俞 立.鲁棒控制—线性矩阵不等式处理方法[M].北京:清华大学出版社,2002.
[11] 张银峰,聂子玲,李建平,等.μ分析与综合方法在航空电源中的应用[J].电力电子技术,2016,50(12):102-105.
[12] 何 联,姜晓明,孟范伟,等.μ综合中的D-K迭代法[J].电机与控制学报,2010,14(9):31-35.
猜你喜欢
Journal of Palaeogeography(2022年1期)2022-03-25 04:17:00
快乐语文(2021年35期)2022-01-18 06:05:30
法律方法(2019年4期)2019-11-16 01:07:28
自动化学报(2019年6期)2019-07-23 01:18:22
摄影之友(影像视觉)(2017年1期)2017-07-18 11:12:16
厦门理工学院学报(2016年1期)2016-12-01 04:50:41
北京航空航天大学学报(2016年7期)2016-11-16 01:51:01
系统工程与电子技术(2016年4期)2016-08-24 07:46:18
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17