电特性检测在电机预防性检修和故障诊断中的应用研究
2018-05-02 03:51:09董庆丰
机电工程 2018年4期
李 霏,顾 含,董庆丰
(中国卫星海上测控部,江苏 江阴 214431)
0 引 言
目前,因电机有着,原理成熟、结构可靠、维护简便等优点[1]。在测量船上得到广泛应用,它的性能和技术状态直接影响了船舶整体保障和技战术水平。
根据统计,电机故障中有近一半为电气故障。在长久的电机使用和管理过程中发现,电机发生转子或定子故障时,容易导致绕组过热而被烧毁,甚至发生接地故障以及相间故障。
在当前电机电气故障的判断中,实际管理和可操作层面主要是对电流、电压、绝缘情况进行判断,预判性和精确定位性不佳。
本文将提出电机电特性检测方法,采用模糊诊断规则,运用电机模型对电机故障精确判断方法进行必要的优化。
1 电机故障概率情况分析
IEEE在《IEEE Std C493-2007(Design of Reliable Industrial and Commercial Power Systems)》《IEEE Std C37.96-2012(IEEE Guide forAC Motor Protection)》中,统计与分析了1 000余台电机的技术状态,其中故障部位和故障发生的概率如表1所示[2-3]。

表1 电机出现故障部位及概率
注:部分电机不止一处故障。
美国电力研究学会(EPRI)对于电机的报告中,电气故障原因占47%,机械故障原因占53%。电气故障主要为匝间、层间和相间短路绝缘问题、电机内部或外部接线盒线缆损坏,电机故障统计分布图如图1所示。

图1 电机故障统计分布图
测量船长期在远海工作,其电机工作情况相对恶劣。
通过对近8年某测量船电机故障发生情况进行统计:全船电机发生各类故障84起,其中机械故障53起,电气故障31起,如图2所示。

图2 某测量船2008年—2015年电机故障统计
因此,在测量船进入服役年限的中后期,预先发现故障隐患、预先进行保养检修对于提升船舶安全性、延长装备使用寿命显得尤为重要。电特性检测为解决电气故障提供了有效途径。
2 电机状态检测技术
“以可靠性为中心的维修模式(RCM)”的理念在20世纪末由欧美发达国家率先提出。该模式核心理念是装备主动维修,核心目标是提升装备可靠性[4]。检测技术作为其中开展维修技术支撑的关键环节,逐渐演变成为应用研究方向。
预防性检修的装备管理和保障模式已经在测量船广泛运用,但缺乏相应的技术支持,导致预防性检修在实际运用中存在一定的盲目性,电机状态检测技术能够提出相应支持。
按照电机检测时所处的状态不同,主要分为静态和动态检测,更详细地划分为:电气动态检测、电气静态检测和机械动态检测3大技术[5]。
电气静态检测和动态电气检测均是对电机的电气参数进行测量。机械动态检测则是对电机进行机械部件的检测,现在主要采用信号分析和处理方法进行,能够从机械角度判断电机的性能状态。例如,利用谱峭度特征提取进行轴承故障检测[6]等。
3 电机电特性综合检测
电机的电特性源于美国海军电机检测、监测实际应用过程中的习惯称法,现在并没有成体系的标准定义。本文将交流电机电气静态状态下,绕组每两相之间的电阻、电感、阻抗、相角、倍频和绝缘情况等的电机技术数据组合统称为电机静态电特性。
3.1 电特性检测与常规方法的比较
测量船常用的电机检测方法主要通过电机绕组绝缘,绕组阻值、效率,运行电压和电流是否平衡等进行技术状态判断。该类方法的缺点是无法判断故障和隐患的严重程度,无法精确判定故障部位。
电机的电特性的检测方法借助电特性参数分析、计算,针对常用方法中无法判定的阻值微弱变化,早期的相间、层间、匝间短路故障进行可靠判别,并能通过相应判据精确区分故障源自于电机定子或是转子。相较其他方法,电特性检测并不需要使用额外的数据传感器[7]。
桑美(BJM)公司现已推出的ALL-TEST 31、ALL-TEST 4、ALL-TEST 4 PRO2000等电机全参数检测仪器与设备能够对电特性检测所需要的相关参数进行检测。
3.2 电特性检测原理
本研究根据电机原理和电特性检测原理,对电机建立等效电气原理电路,如图3所示。
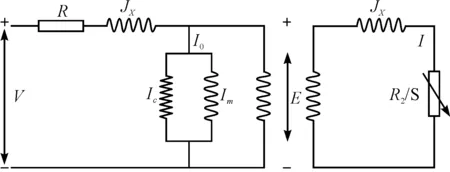
图3 电机等效电路
在实际的检测运用中,通过相关仪器与检测设备将所需要的电机电特性参数检出,并通过进一步计算,获取电阻、电感、阻抗、相角、倍频等参数。其中,阻抗和倍频两个参数是电特性检测中的关键参量[8]。
对电机等效电路进行分析,在对电机输入一个高频电流时,其电感对于电路的影响远大于电阻,此时可以电路近似为一个纯电感电路。而在电机发生短路故障时,在这里以匝间短路为例进行分析,此时电机绕组不再表现为感性电路,失去电感作用,电阻对于电路的影响就远大于电感,在模型中即表现为一个阻值较大的电阻电路。按照等效电路进行计算,其表现为纯电感和纯电容时,电路当中的电流分别为纯电阻状态的1/2和2倍[9-10]。
因此,根据电机原理电路,匝间故障将导致其电路状态发生改变,即根据故障严重程度,等效电路将向纯电阻电路逐渐过度变化,而其倍频值则表现为由-50%逐渐衰减至0的过程。因此,可根据倍频变化判断电机绕组质量。
阻抗平衡测试相较电机检测中常用的三相电压平衡测试、三相电流平衡测试更为准确和精确。
3.3 电特性检测的评判
3.3.1 电静态三相平衡的评判
IEEE对于电机性能状态的评判标准。该标准是根据国际电气组织近20年来的测量情况所得如表2所示。
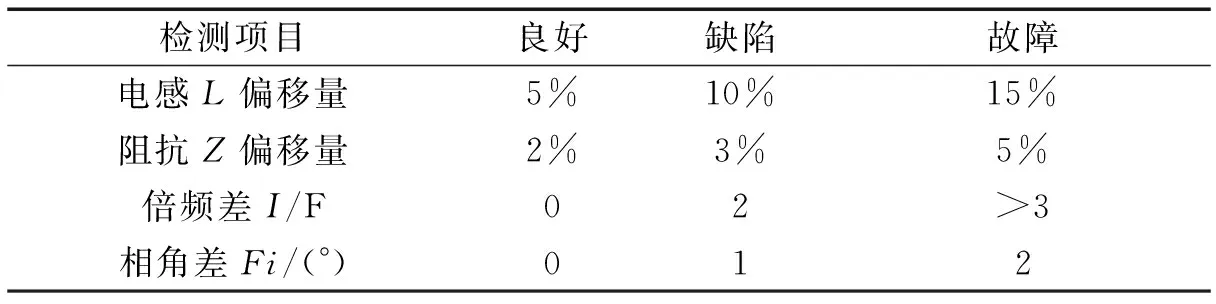
表2 IEEE电机三相平衡标准
表中的数据为电机静态特性中,三相电中每两相所测数据的偏移值比对。电感和阻抗的判断标准为其波动值所占其均值的百分比,而倍频、相角检测则为三相中任取两相测量值之差的最大数值。
其中,偏移量为对三相平均值的偏移量最大值。倍频为定义的测试量,即电流在频率加倍后的变化量。当频率加倍后,电路为纯电感电路时,电流变为原来1/2;纯电阻电路时,电流不变;纯电容电路时,电流增加一倍。因此,电机出现匝间短路的发展趋势即是I/F值从-50%向0%的发展趋势。
3.3.2 潘罗斯判据
潘罗斯判据是由美国现任德雷思科勒电机公司副总裁霍华德·W·潘罗斯博士提出的。该方法得到了国际电机组织的认可[11]。
潘罗斯判据适用于所有三相电机。在电特性检测中,采用潘罗斯判据作为评判准则进行建模,利用模糊诊断方法对电机故障进行仿真。
3.3.3 评判准则的模糊诊断优化和仿真
综合三相平衡和潘罗斯的评判方法,已能够对电机三相平衡和三相不平衡来源进行判别,并根据表2能够对电机健康状态进行初步判别,但仍无法精确判断电机绕组故障程度。现要通过Simulink软件的fuzzy工具和Matlab软件建立电机模型,进行对应的仿真计算和分析,并用模糊诊断的方法对评判准则进行优化。
本研究根据电机模型和电路理论,参照模糊诊断的假设条件[12],建立相轴模型方程,电机绕组运行情况表示为:
(1)
(2)
式中:下标1—定子绕组;下标2—转子绕组;ψ—磁通;R—电阻;M—电感;I—电流;U—电压;K—常数矩阵;s—为转差率;ωN—额定角速度;F—定子绕组的对称系数矩阵;F—绕组短路的严重程度用矩阵函数,F=diag(fa,fb,fc)。
其中,fi(i=a,b,c)=(总匝数—故障匝数)/总匝数。绕组在正常情况下,保持三相对称,即fa=fb=fc=1;而当绕组的某相发生短路故障时,则三相平衡被破坏,即fa=fb=fc<1。
ψ2=diag(ψ2a,ψ2b,ψ2c)
(3)
P1=diag(r1,r2,r3)
(4)
R2=diag(r2,r2,r2)
(5)
(6)
(7)
(8)
(9)
在fuzzy工具的诊断器中,输入定子绕组三相电流ia、ib、ic的标幺值Ia、Ib、Ic,三相电流的方差V,输出为电机的定子状态SC。将电机绕组的4个电特性参数电感、阻抗、倍频和相角分别对应模糊集:VS,S,M,L,将绕组的匝间、层间、相间状态分别对应3个模糊集:N,D,SD。
Simulink仿真模型图如图4所示。
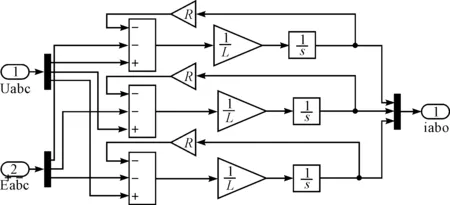
图4 Simulink仿真模型故障环设定
在模型中,代入电机基本输入参数,如表3所示。
表3 模拟电机输入参数
Simulink的仿真结果经过Matlab软件输出电机绕组模拟状态后,得到电机绕组状态的仿真结果,如图5所示。
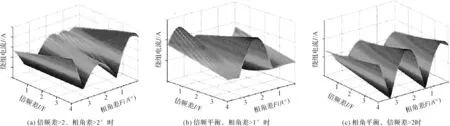
图5 电机仿真图
图5中,倍频、相角和绕组电流分别对应x,y,z轴。图中能够表示绕组电流状态,其中波谷为电机气隙部分,波峰为绕组位置,浅色为其在正常温度范围运行,深色为绕组出现过电流的状况,可以判断为存在短路。图5(a-c),分别对应与I/F>2且Fi>2°,Fi>1且I/F平衡、Fi平衡且I/F>2时的绕组状态,3个波峰对应电机绕组线圈的匝间、层间和相间状态。
根据图5(a),绕组在倍频差大于2,相角差大于2°的波峰出产生过电流,说明存在同相、同绕组的匝间短路;图5(b)在相角大于1°的区域的两个波峰出现了过电流,说明绕组存在层间短路;图5(c)中倍频差大于2的区域内,3个波峰出现过电流,说明绕组存在层间短路。
因此,基于Simulink软件的电机绕组模型能够很好地反映绕组故障中的短路情况,能够精准判别相间、匝间和层间短路3种状态。
4 实验及结果分析
由于其可在线进行检测的便利性,电特性检测能够作为一项电机的日常检测项目结合电机预防性保养等进行实施。采样数据可通过桑美公司的检测仪器检出,在电机配电或接线位置选择三相线即可进行检测。
4.1 海水冷却泵电特性检测实例
某测量船辅机海水冷却系统某台海水冷却泵电机,铭牌标注性能指标为额定电压380 V,额定功率45 kW,额定转速2 960 r/min。
在2008年装船后使用8年,分别在2015年2月和2016年3月对其进行2次的电特性采样,2次数据如表(4,5)所示。
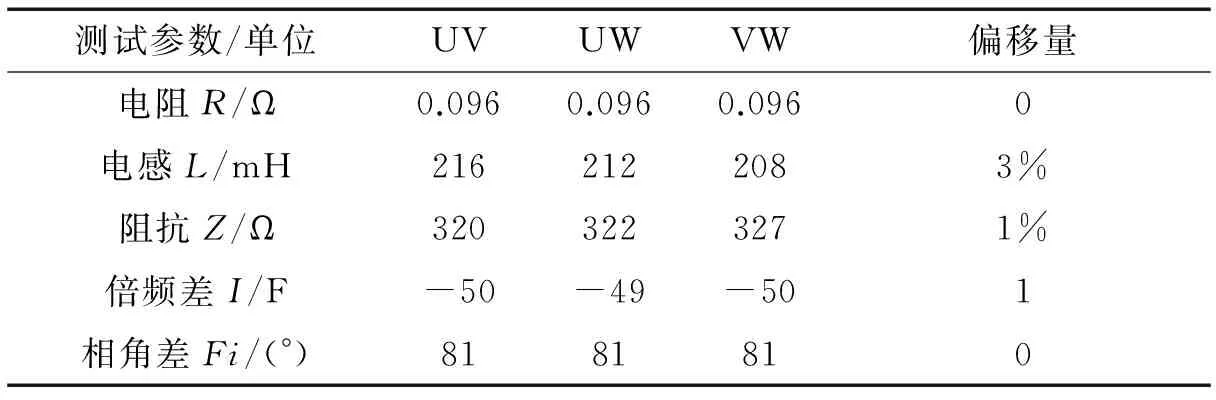
表4 2015年电特性数据采样
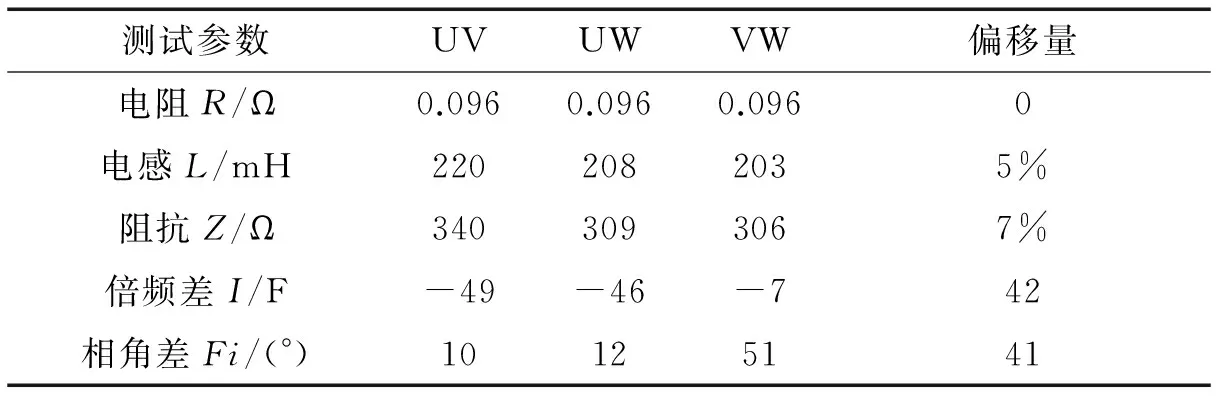
表5 2016年电特性数据采样
根据2015年的数据采样结果分析,该电机各项参数正常,而在正常使用中也未表现出故障征兆,性能良好。
而在2016年后,该电机的带负载性能下降,运行电流显著增大,遂再次进行电特性采样。通过评判准则,其三相绕组状态存在不均衡的现象,电机的电感与阻抗为非比例线性关系,推断其三相绕组不平衡是由于电机定子问题导致。再根据评判准则的优化结论,相角差和倍频差数值均大于2,判断其绕组存在匝间短路。之后对该电机进行拆检,发现实际情况与推断一致。后调取该电机的运行登记簿,发现其使用频率高、强度大,而预防性保养的次数较少,导致其在正常运行8年时间后,在短短1年时间内即出现了故障急速恶化的情况。
4.2 海水增压泵检测实例
某测量船板式蒸馏造水机的海水增压泵电机,铭牌标注性能指标为额定电压380 V,功率13.5 kW,转速2 970 r/min。该电机在使用3年时间后,运转中常伴随有异常噪声,且振动剧烈。
观察其运转时电流情况,在负载稳定的情况下,存在电流较大的波动,故对其进行电特性采样,采样数据如表6所示。
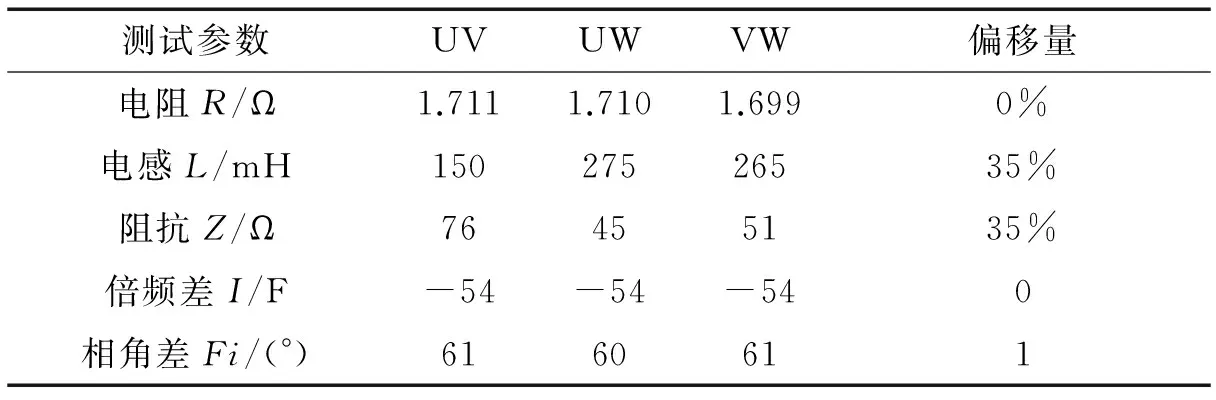
表6 2014年电特性数据采样
其中,UV,UW,VW分别为三相电机U、V、W三相的相间参数。
根据数据判断,该电机电感和阻抗偏移值均达到了35%,存在较为严重的三相不平衡情况;而其电感和阻抗并非等比例线性关系,根据其实际运行情况,推断其转子绕组存在故障。在之后进行的拆检中,其转子断条。电特性检测的实际效果得到验证。
5 结束语
针对目前采用常用方法无法对阻值变化微弱的早期相间、层间、匝间短路故障进行可靠判别的问题,本研究采用了潘罗斯判据,运用了模糊诊断的方法精确地区分了源自于电机定子还是转子的故障,并判别相间、匝间和层间短路3种状态,借助2个实验对该方法的可行性进行了验证。
实验结果表明:采用该方法与电机动态性能检测相配合,能够更为全面地反映电机电气状态,这对于电机性能的综合评估和故障判断具有广泛的应用价值。
参考文献(References):
[1] 杨金芳.电机电器状态检测与故障诊断[J].中国新技术新产品,2014(9):122.
[2] IEEE Std 493TM-2007. Design of reliable industrial and commercial power systems[S]. New York: IEEE Power and Energy Society,2007.
[3] IEEE Std C37.96TM-2012. IEEE guide for AC motor protection[S]. New York: IEEE Power and Energy Society,2012.
[4] 邱赤东,任 光.船舶电机早期故障检测方法的研究[J].系统仿真学报,2009,21(1):277-281.
[5] 王旭红,陈 艳,彭建春.在线监测电机定子绕组匝间短路故障的新方法[J].高电压技术,2003,29(1):28-30.
[6] TIAN J, MORILLO C, AZARIAN M H, et al. Motor bearing fault detection using spectral kurtosis-based feature extraction coupled with K-nearest neighbor distance analysis[J].IEEETransactionsonIndustrialElectronics,63(3):1793-1803.
[7] TIAN J, AZARIAN M H, PECHT M. Anomaly detection using self-organizing maps-based K-nearest neighbor algorithm[D]. College Powk: Center for Advanced Life Cycle Engineering, University of Maryland,2014.
[8] 洪 杰.电机综合保护及转子故障诊断的研究[D].合肥:合肥工业大学机电工程学院,2009.
[9] 张建文,姚 奇,朱宁辉,等.异步电动机定子绕组的故障诊断方法[J].高电压技术,2007,33(6):114-117.
[10] 蒋云飞,杨宣访,张 超.发电机转子绕组匝间短路故障检测[J].电机控制与应用,2011,36(6):40-45.
[11] PENROSE H W, JETTE J. Static motor circuit analysis: an introduction to theory and application[J].IEEEElectricalInsulationMagazine,2000,16(4):6-10.
[12] CHANG X, COCQUEMPOT V, CHRISTOPHE C. A model of asynchronous machines for stator fault detection and isolation[J].IEEETrans.onIndustrialElectronics,2003,50(3):578-584.
猜你喜欢
防爆电机(2022年3期)2022-06-17 01:41:08
大电机技术(2022年1期)2022-03-16 06:40:10
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
大庆师范学院学报(2015年3期)2015-12-24 07:35:36
中国光学(2015年5期)2015-12-09 09:00:42
电源技术(2015年12期)2015-08-21 08:58:44
电测与仪表(2015年12期)2015-04-09 11:44:44
电机与控制应用(2015年2期)2015-03-01 03:49:29
大电机技术(2015年5期)2015-02-27 08:22:30
电测与仪表(2014年14期)2014-04-04 11:53:30