直升机着陆过程中动不稳定现象分析
2018-04-29 00:44:03董明明刘国强于琦
航空科学技术 2018年1期
董明明 刘国强 于琦
摘要:通过分析某型直升机在尾起落架着地时出现的机体异常振动,建立了一种以直升机状态及操纵参数为基础,以时频分析为手段的地面动不稳定性方法。首先分析異常振动与正常振动的异同点,通过时频分析获得引起异常振动的现象特征。通过频率根源查找,最终找出引起异常振动的原因为机体的俯仰模态与旋翼摆振后退型耦合引起的一种动不稳定现象,并对引起该种现象的原因加以分析,给出改进措施,为今后的直升机动不稳定试飞技术提供参考。
关键字:旋翼;异常振动;时频分析;不稳定现象;摆振后退型运动
中图分类号:V32
文献标志码:A
DOI:10.19452/j.issn1007-5453.2018.01.067
旋翼和机体耦合系统的动不稳定性运动(“地面共振”及“空中共振”)是直升机在运转过程中的动力学问题,它的出现往往在很短的时间内就会导致直升机毁坏,甚至引发人员伤亡。一般直升机在地面运转过程中,出现的旋翼与机体耦合的不稳定现象,称为地面共振。对于旋翼与机体系统,若系统随时间发散,则表明系统不稳定,则系统会发生地面共振现象;若系统随时间衰减,则表明系统是稳定的,则系统不会发生地面共振现象;若系统随时间时等幅振荡,则表明系统处于临界稳定状态。
本文针对某型直升机在尾起落架着陆过程中机体振动有明显增大的现象,以直升机状态参数为基础,利用时频分析方法分析发生引起该异常振动的原因,分析机体的俯仰模态与旋翼摆振后退型耦合导致的机械不稳定现象,同时提出解决该问题的办法。
1异常振动现象
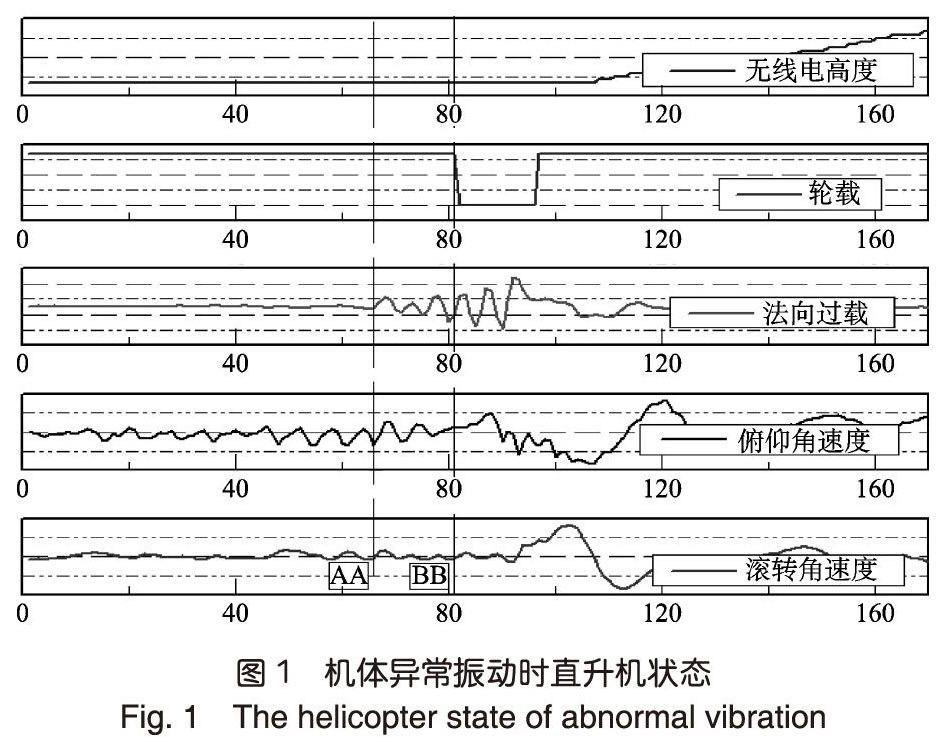
直升机在某次地面着陆时,机体出现了难以忍受的异常振动,飞行员通过提总距使这种异常振动消失。针对机体出现的异常振动,本文对直升机状态参数进行分析,包括过载信号、俯仰角、滚转角及飞行员的各项操纵等参数,如图1和图2所示,图1为机体的状态参数,图2为飞行员进行的各种操纵。
从图1看出,法向过载在AA时刻,开始出现突变,当总距在BB时刻时即总距处于中等总距时,法向过载继续增大,总距放到底时,异常振动继续增大,之后飞行员迅速提总距,法向过载在提总距过程中出现峰值,过载最大值为1.78,之后异常振动衰减,直至消失。从图1还可看出,俯仰角速度在AA时刻之前有明显的不定周期信号,且随时间变化周期越来越大。
从图2看出,在AA时刻之前及异常振动过程中,周期变矩杆几乎没有变化,脚蹬操纵在BB时刻之后有比较缓慢的脚蹬操纵。而总距操纵在整个降总距过程,有明显的周期信号。
该型机在之前着陆时,没有出现该异常振动,且着陆过程较平稳。为便于对比,给出直升机着陆时机体在正常振动时直升机的状态参数及操纵参数,如图3和图4所示。
从图3看出,直升机在AA时刻,法向过载开始突变,在此过程中飞行员缓慢释放总距,总距处于BB时刻即处于中等总距时,法向过载最大,过载最大值为1.02,随后振动逐渐衰减,最终趋于平稳,俯仰角速率的变化有较低的不定周期信号。另外,从图4看出,总距操纵没有明显的周期信号,因此,直升机在此状态着陆时,飞行员反应着陆动作较平稳,没有振动发散现象,与上述数据表征特征一致。
对比着陆过程中,异常振动和正常振动的相同点在于:在着陆过程中,过载值均会突然增大;不同点在于:异常振动过载值比正常振动大很多;总距在异常振动时有较明显的周期信号,而正常振动时没有较明显的周期信号;俯仰角速率在异常振动时有较明显的不定周期信号,且频率较高,而正常振动时,俯仰角速度的周期信号频率较低;其中最大的不同在于:异常着陆时,总距降到底时,振动未衰减,反而越来越大;而正常振动时,振动在中等总距量时,振动已衰减。
2异常振动特征分析
从异常振动数据表述特征发现,周期变距杆和脚蹬操纵不是引起异常振动的原因,如图5~图10所示。因此,分析时不考虑其操纵的影响。另外从数据发现,总距的操纵及俯仰角速率的变化均有不定周期信号存在,而正常振动的总距操纵未有周期信号,且俯仰角速度的周期频率也相较于异常振动时低。
为找出引起异常振动的原因,需对异常振动过程的特征进行分析。传统的方法有时域法和频域法。传统的时域法适用于有明显振动特征的信号,而传统的频谱法应用于平稳振动过程的信号处理,而从数据表征来看,总距与俯仰角速率是不定周期,且随时间有变化,应用上述两种方法均不能完全的表现信号特征。本文分析时利用时频分析的方法,该方法可以在时间域观察频率及信号能量特征。振动以过载信号分析为准,另外需分析总距操纵量及机体状态等参数。本文主要分析了直升机在着陆时出现的异常振动与正常振动时法向过载、总距操纵、俯仰角速度等参数。
图5、图7和图9为直升机在着陆时,异常振动过程中的法向过载、总距操纵、俯仰角速度时频分析图。从图中看出,异常振动时,法向过载最大值为1.78,法向过载及总距操纵的4~6s出现幅值增大的趋势,频率表现为以4.5Hz为主;俯仰角速度的频率在整个着陆过程是变化的,频率在2~4.5Hz变化,呈递增趋势,频率在4.5Hz时响应较大。
图6、图8和图10为直升机在着陆时,正常振动过程中的法向过载、总距操纵、俯仰角速度时频分析图。从图中看出,正常振动时,法向过载量值为1.02,比异常振动时量值小很多,在3~6s发生幅值增大的趋势,时域首先出现2.5Hz左右的频率,随后在5s时出现4.5Hz左右的频率。总距操纵没有2~5Hz的特征频率,俯仰角速率首先出现1.5Hz的频率,之后出现3Hz左右的频率,没有出现4.5Hz的频率特征。
综上所述,在异常振动时,机体存在4.5Hz左右的异常频率且幅值较大,并且总距、俯仰角速度等参数也有该频率特征出现;而对于正常着陆,机体着陆时首次出现的频率较低,之后才出现4.5Hz的频率,总距、俯仰角速度等参数没有该频率特征出现。
3原因分析
通过以上数据分析,发现引起异常振动的频率为4.5Hz,对比全机的模态,发现该频率为机体的俯仰模态,又因该架机摆振后退型传到机体的频率也在4.5Hz附近,因此,引起该异常振动的原因为旋翼的摆振后退型运动与机体的俯仰模态耦合导致的动不稳定现象。一般在地面发生的动不稳定现象,若系统随时间衰减,则说明系统是稳定的,即起落架系统与旋翼摆振阻尼足够;若系统随时间发散,则说明系统是不稳定的,即起落架系统与旋翼摆振阻尼不够,则会发生地面共振现象。直升机的动不稳定现象包括地面共振和空中共振,发生在地面工作状态时,一般称为“地面共振”。直升机地面共振的机理是旋翼后退型摆振运动与桨毂重心有平移的机体模态耦合,机体受到初始扰动后,各片桨叶不均匀地摆振起来,产生一种不平衡的回转离心力,激起机体在起落架上的振动。若这两个振动系统存在这样的关系:旋翼系统产生的离心激振力频率与全机在起落架上的振动某阶固有频率相同或接近,并且对应固有频率的固有振型使得桨毂中心在旋转平面发生振动,同时两个系统的阻尼不能消耗上述激振力对系统做的功,桨叶的摆振和全机在起落架上的振动就会互相加剧,恶性循环。振幅大到损坏直升机的程度,这种现象称为“地面共振”。若桨叶减摆器与起落架的阻尼足够大,或者旋翼系统的离心力激振力频率与全机在起落架上的振动频率相差足够远,则直升机因外界干扰而激起的振动就会削弱,直至衰减,则不会发生地面共振现象。
在分析地面共振时,建立机体与起落架的空间分析模型,如图11所示。将直升机看作在弹性起落架上的刚体,旋翼与机体的耦合方程用式(1)表示。其中,式(1)中前两个公式表示多桨叶摆振平衡方程,后两个公式表示机体运动方程。式中:ζc=2/NNK=1cosψ看,ζs-2/NNK=1sinψk,ζk,ψk,N分别为第k片桨叶的基阶摆振位移、方位角与桨叶片数,Iζ为桨叶转动惯量,Sζ为桨叶质量静距,wζ为机体固有频率,u=NMb/Mb,Mb为单片桨叶质量,X,Y是机体坐标系中的X和Y方向。
式(1)为旋翼系统与起落架系统的耦合方程,一般在分析时,考虑机体的航向、俯仰、侧移、滚转等模态。在理論上可以利用该模型计算系统是否稳定。
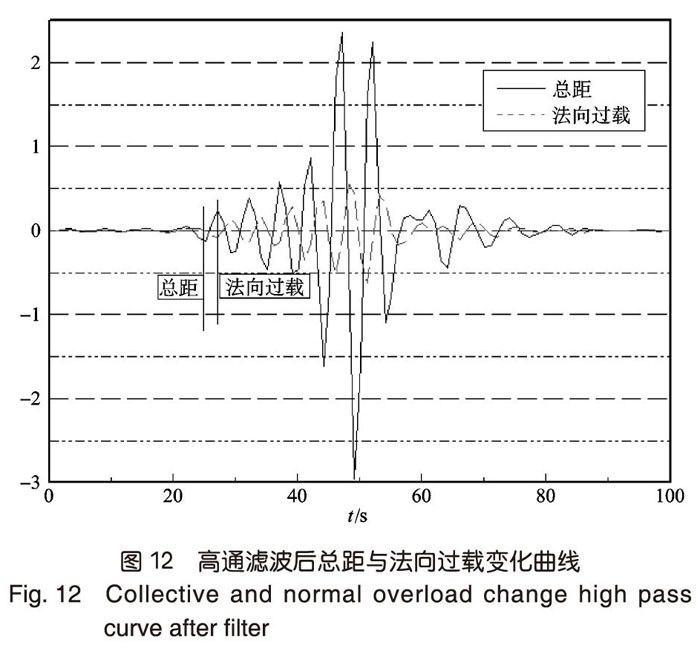
因该直升机为后三点式起落架模式,且尾起落架距离主起落架较远,在地面滑行过程中或着陆过程中很容易发生俯仰方向上的动不稳定现象。当该直升机着陆时,随着各个起落架的压缩,起落架的刚度逐渐增大,使得机体的俯仰模态频率逐渐增大,当频率增大到4.5Hz时,即激励出机体的俯仰模态。又因直升机着陆过程飞行员紧握总距杆,总距杆在此时就以4.5Hz的频率在振动,而总距与周期变距杆有耦合,直接将该频率传递给旋翼系统,激励出旋翼的摆振后退型模态,使得摆振后退型模态与机体俯仰模态耦合,进而导致整个机体将以4.5Hz的频率振动。为说明总距与振动时间先后关系,对总距与法向过载进行高通滤波,如图12所示,发现总距与法向过载变化趋势相同,且总距先于法向过载发生,说明引起该动不稳定的原因为总距激励引起的。对比该型机在其他几次着陆时,随着飞行员降总距,振动最终衰减下来,说明系统阻尼是足够的。而本次着陆试验会出现如此大的振动(过载),是因在低总距下,旋翼系统几乎没有气动阻尼,系统阻尼会更小,因此在直升机低总距时,振动有增大的趋势,而此时该振动频率未衰减,又因飞行员快速提总距,相当于重新给系统一个气动激励,因此振动峰值出现在提总距过程中。对于正常着陆时,总距及俯仰角速度在整个频率段未出现4.5Hz的频率,从而就不构成频率的传递,因此未发生本文出现的动不稳定现象。
4解决办法
从分析得知,引起异常振动的原因为旋翼摆振后退型运动与机体俯仰模态耦合引起的动不稳定现象。从俯仰角速度时频分析曲线对比看出,直升机在接地时刻,异常振动俯仰角速度比正常振动频率更高一些,这说明异常振动时起落架的刚度较正常振动大。一般引起起落架刚度大的原因有以下几个方面:
(1)空气腔初始压力越大,起落架就越“硬”,缓冲器的压缩量就越小;
(2)初始容积越小,起落架就越“硬”;
(3)气体多变指数越大,起落架刚度就越“硬”,初始容积的大小涉及到改变起落架充油量及油液高度等参数,不易操作。
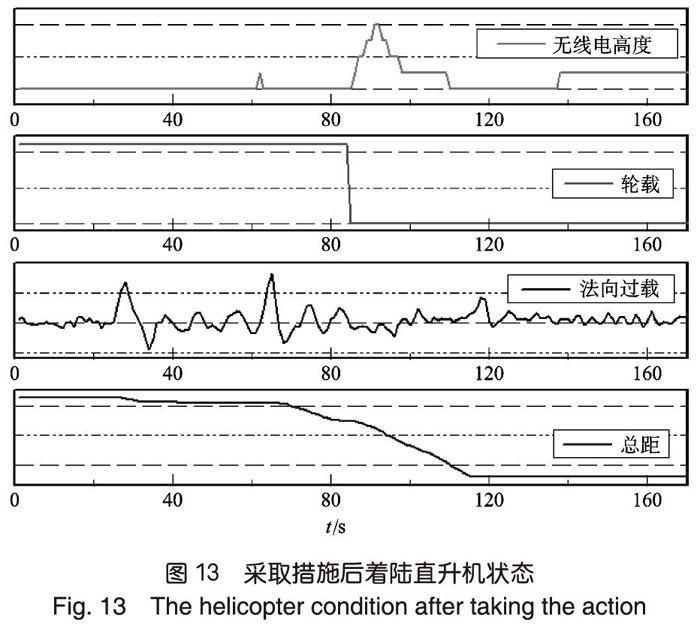
气体多变指数的改变不易检测,可以通过减小初始压力的方法,这个方法容易操作且易检测。因此,针对起落架刚度硬的特点,通过降低起落架缓冲器初始气腔压力,进而降低起落架刚度,使得直升机在俯仰方向上频率降低。通过该种措施后,该型机着陆比之前平稳很多,如图13所示。从图中看出,总距处于中等总距时(如画实线位置),法向过载已经开始衰减,并且法向过载量值比之前异常振动时降低了很多,过载值为1.1。采用该方法未从本质上解决该不稳定现象,要从根本上解决此间题,就要使旋翼系统产生的激振力频率与全机在起落架上振动的各阶固有频率分开,并使分开的足够远,才能从根本上有效地防止“地面共振”。仅有增加阻尼的办法消除“地面共振”比较困难。
5结论
本文分析了直升机在着陆时出现的异常振动,通过对数据进行分析,可得出以下结论:
(1)建立了一种分析直升机状态及操纵参数为基础的的地面动不稳定性方法。找到引起地面不稳定性的原因,采取降低缓冲器压力的方法,进而改变直升机着陆时的俯仰角速度的频率,在一定程度上抑制了地面动不稳定性的发生。
(2)本方法已经应用于型号试飞当中,为今后的直升机着陆过程中的动不稳定现象提供研究方向,为设计改进提供方向,为安全飞行提供理论基础。
猜你喜欢
水文地质工程地质(2022年2期)2022-04-13 09:02:34
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
百科探秘·航空航天(2020年8期)2020-07-29 09:06:03
军民两用技术与产品(2019年12期)2020-01-19 05:13:00
电子制作(2019年9期)2019-05-30 09:41:48
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
光学精密工程(2016年1期)2016-11-07 09:02:03
中国铁道科学(2015年4期)2015-06-21 06:46:02
实验技术与管理(2014年12期)2014-03-11 18:38:28