惯性导航系统标定滤波方法研究
2018-04-29 00:44:03姜雪梅车转转
航空科学技术 2018年1期
姜雪梅 车转转
摘要:捷联惯导系统标定技术对提高导航精度十分必要,而惯性导航系统标定选择的滤波方法直接影响到标定的精度。本文对不同状态的滤波估计方法进行了理论分析,利用不同标定仿真环境下所采用的卡尔曼滤波及其他滤波方法,对惯性器件误差及安装误差进行了估计,并通过仿真分析比较了惯性导航标定中各种滤波算法的特点及适用范围,得出了算法的应用建议,对惯导误差模型标定具有一定的工程指导意义。
关键词:惯性导航;标定;滤波;有色噪声;自适应
中图分类号:V249.32+2
文献标识码:A
DOI:10.19452/j.issn1007-5453.2018.01,046
慣性器件(陀螺和加速度计)误差会引起惯性导航(惯导)系统(Inertial Navigation System,INS)随时间累积的导航误差,影响导航精度。为了提高INS的导航性能,需要对INS进行标定。系统级标定滤波方法是设计一种合适的滤波器,将惯性导航系统误差参数作为滤波器的状态变量,通过对导航误差的量测,实现各误差模型参数的标定。由于它可以降低对转台精度的要求,因此受到研究人员的广泛关注。
INS误差模型参数的标定,Blanchard、Grewal分别设计了不同维数的状态滤波器,估计陀螺误差参数和加速度计(加计)误差参数。S.P.Dmitriyev对惯导误差模型标定中的非线性滤波技术做了研究,提出一种优于卡尔曼滤波算法(KF)的算法。杨华波采用扩展卡尔曼和迭代卡尔曼实现平台式INS误差模型参数的标定。王新国利用星光观测在线估计弹载光纤陀螺捷联惯导的陀螺零偏标度因数和安装误差,设计了无迹卡尔曼滤波器UKF。
上述所述主要是针对INS的确定性误差模型或非线性模型参数的标定进行分析和研究。而在实际的惯导误差模型中,误差中往往含有有色噪声等统计特性未知的噪声,单纯采用确定性误差建模以及非线性模型的滤波器,会引起对误差的估计偏差,进而影响惯性器件的标定精度。
本文首先选择惯导误差模型,分析各模型存在的问题,进而给出相应的解决方法。针对有色噪声误差,采用扩维等方法实现误差模型参数标定;针对噪声统计特性未知或时变误差,采用自适应滤波等方法实现误差模型参数标定。最后,对多种仿真条件下不同滤波方法的估计性能进行分析比较,得出INS标定滤波方法的应用建议。
1惯导误差模型分析与解决方案
1.1惯导误差模型
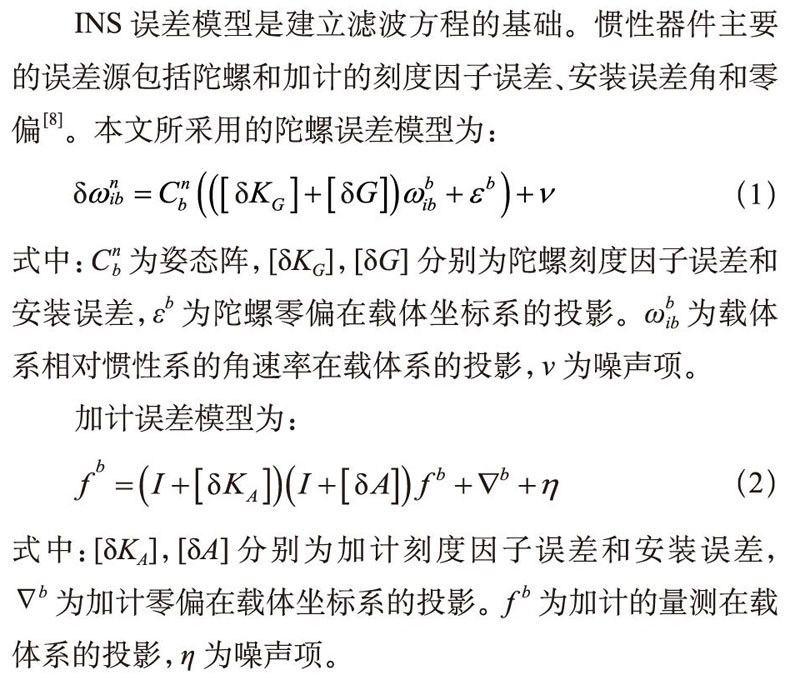
INS误差模型是建立滤波方程的基础。惯性器件主要的误差源包括陀螺和加计的刻度因子误差、安装误差角和零偏。本文所采用的陀螺误差模型为:式中:Cnb为姿态阵,[δKG],[δG]分别为陀螺刻度因子误差和安装误差,δb为陀螺零偏在载体坐标系的投影。wbib为载体系相对惯性系的角速率在载体系的投影,v为噪声项。
加计误差模型为:式中:[δKA],[δA]分别为加计刻度因子误差和安装误差,▽b为加计零偏在载体坐标系的投影。fb为加计的量测在载体系的投影,η为噪声项。
1.12惯导误差传播模型
惯导误差传播方程描述的是惯导解算误差与真实导航信息以及惯性器件误差之间的模型。
1.2.1姿态误差方程式中:φ为姿态误差角矢量,δwnib为陀螺误差,wnin为导航坐标系到惯性坐标系的角速度,@为四元数乘法。
式(3)为非线性姿态误差方程,略去二阶小量,可得线性速度误差方程:
1.2.2速度误差方程式中:δVn为速度误差,φn为姿态误差角矢量,δKA为加计刻度系数误差,δA为加计安装误差角,▽b为加计零偏,wnie为地球自转角速度,wnm为导航坐标系相对于地球坐标系的角速度。
式(5)为非线性速度误差方程,由于g的误差量很小,忽略δg的影响,并略去二阶小量,可得线性速度误差方程:
1.2.3位置误差方程式中:δL为经度误差,δλ为纬度误差,δh矗为高度误差。
1.3模型分析与解决方案
1.3.1有色噪声及解决方案
陀螺和加计的测量误差用式(1)、式(2)表示,式中的随机误差项一般呈现有色噪声特性,不能简单地用高斯白噪声表示。随机漂移大致可以概括为三种分量:逐次启动漂移、慢变漂移和快变漂移。在标定过程中,对陀螺和加计的随机误差进行准确建模,有利于提高确定性误差的标定精度。
卡尔曼滤波要求系统驱动噪声和量测噪声都必须是白噪声,当出现有色噪声时,卡尔曼算法估计精度会下降甚至失效。针对有色噪声系统,本文采用扩维卡尔曼滤波器和H无穷滤波器对有色噪声下的误差进行标定。
扩维卡尔曼滤波器有三种:状态扩维卡尔曼滤波器、量测扩维卡尔曼滤波器和扩维卡尔曼滤波器”,可以分别解决系统噪声、量测噪声以及系统噪声和量测噪声为有色噪声问题。该方法是将滤波方程中的有色噪声部分扩维到状态中,使扩维后的噪声满足白噪声特性,再进行卡尔曼滤波。
H无穷滤波器是在系统噪声协方差、量测噪声协方差以及状态初始协方差阵未知的情况下,将噪声以及状态初始值的不确定性对估计精度的影响降低到最低程度,使滤波器在最恶劣条件下的估计误差达到最小。H无穷滤波是在严重干扰下的最优滤波,滤波鲁棒性是其最显著的特点。
1.3.2噪声统计特性未知或时变问题及解决方案
惯导误差模型参数标定过程中,经常会存在系统噪声统计特性或量测噪声统计特性不准或时变的问题,本文采用自适应卡尔曼滤波器解决。自适应滤波一方面利用量测不断地修正预测值,同时也对未知的或不准确已知的噪声统计参数进行估计,即在滤波的同时实时估计噪声的统计特性,从而提高滤波精度。
Sage-Husa自适应滤波算法简单且具有良好的估计性能,是一种次优无偏极大后验估值器,但它只能解决噪声统计特性固定但未知的问题。基于渐消记忆指数加权的改进Sage-Husa噪声统计估计器,强调了新近数据的作用,对陈旧数据渐渐遗忘,因此,可处理时变噪声统计估计问题。由于噪声是不能直接采样的,因此,该滤波器本质上是采用基于白噪声采样估值的噪声统计估计器,用噪声估值器近似代替噪声采样值。本文采用了基于噪声滤波器和平滑器的自适应卡尔曼滤波算法与Sage-Husa自适应滤波进行对比。
2试验分析
对惯性导航标定中的模型含有色噪声、噪声统计特性未知或时变、高维系统引起的滤波发散等问题,采用了不同滤波方法进行仿真试验,分析算法性能。状态估计的流程如图1所示。
首先,利用龙格一库塔数值积分方法仿真生成真实轨迹和真实的比力角速率,再根据惯性器件误差模型、误差模型参数以及真实的轨迹信息和比力角速率信息生成惯导误差,设定噪声仿真生成量测,进行状态估计,最后根据估计结果分析滤波器性能。
试验参数设置:姿态误差:O.Olrad,加计、陀螺刻度因子误差:500ppm (10-6);加计、陀螺安装误差:300",加计零偏:1×l0-4g,陀螺零偏:o.1(°)/h,加計噪声方差:1xlO-6g,陀螺噪声方差:0.001(°)/h。转台位置误差:O.lm,速度误差:O.Olm/s,角度误差:10"。转速:10(°)/s;仿真时间:216s(一个编排周期)。初始协方差矩阵为:经度、纬度(lx10-3rad)2,高度(lOm)2,速度(1m/s)2,角度(lrad)2,辨识参数(1×10-2)2。
标定性能评价标准:使用相对误差、均方根误差(RMSE)和相对均方根误差(RMSE_rela)衡量标定精度,使用标准化估计误差平方(Normalized Estimation ErrorSquared,NEES)衡量滤波一致性。一致性是为了描述滤波器给出的P阵是否能够准确描述状态估值的不确定性,通过状态估值的概率分布函数来定义。假设k时刻的状态参数估计误差VXk和对应的协方差矩阵为∑Xk,定义NESS=VXk∑-1XKCVTXb,若滤波结果一致,并为近似线性高斯,则NESS满足X2分布,可通过假设检验的方法检验滤波结果是否一致,若检验结果为1,表示一致性好,0表示一致性差。
2.1含有色噪声模型下的滤波方法试验分析
2.1.1参数设置
扩维KF(状态和量测扩维KF)状态参数设置为:加计零位方差1×l0-5g,随机游走10ug√Hz;陀螺零偏方差0.01(°)m,一阶马尔可夫相关时间为1s,均方值0.0001((°)/h2,角度随机游走系数0.00015/√h,其他参数设置同KF。
扩维KF量测参数设置为:量测噪声为一阶马尔可夫过程,相关时间为ls;转台误差标准差:位置O.Olm2,速度0.0001(m/s)2,角度100(")2,其他参数设置同KF。
扩维KF的参数设置是将上述两种算法的参数设置结合。H无穷算法的参数设置同状态和量测扩维KF。
2.1.2仿真试验
首先采用KF和状态扩维卡尔曼滤波对系统噪声是有色噪声的惯导误差模型参数进行标定,为防止滤波发散,设置系统噪声方差阵为高斯白噪声方差阵和一阶马尔可夫过程均方值之和;其次对量测噪声是有色噪声模型的量测扩维卡尔曼滤波与卡尔曼滤波结果进行对比;最后对系统噪声和量测噪声都是有色噪声时的滤波结果与卡尔曼滤波结果进行对比。由于篇幅限制,这里仅列出系统和量测噪声均为有色噪声时的滤波结果,如图2所示。H无穷中θ设置为0.2,KF与H无穷滤波结果对比如图3所示。扩维KF与H无穷算法的精度对比如图4所示。
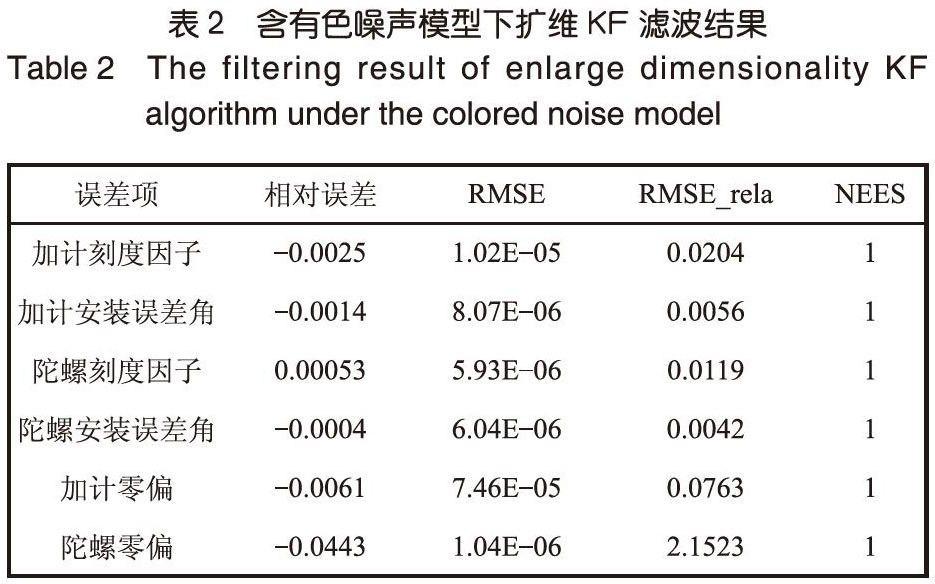
以KF、扩维KF为例分析算法与模型匹配的重要性。采用真实的误差传播方程得到状态真值,再分别采用KF和扩维KF来实现参数标定,蒙特卡罗仿真结束时,滤波估计误差以及滤波给出的理论3σ(其中σ为噪声标准差)边界图如图5、图6所示,其中3σ值由滤波结束时的误差协方差阵给出的状态误差方差值得到,图中用两条直线表示,黑点为每次仿真结束时的误差点。若误差点落在3σ边界线之间,则说明滤波算法与真实模型匹配,否则不匹配。表1和表2中列出了KF和扩维KF的其他指标对比(这里仅列出x轴),NEES表示算法的一致性。0表示一致性差,1表示一致性好,说明滤波算法与惯导误差模型类型一致。
从图4可以看出,同时采用状态扩维和量测扩维法可有效实现状态噪声和量测噪声为有色噪声时的最优滤波,与卡尔曼滤波相比,估计精度有所提高。
由于一阶马尔可夫有色噪声被认为是介于高斯白噪声和随机常值之间的一种噪声,相关时间分别为采样时间和无穷大。实际建模中,是否需要针对一阶马尔可夫单独建模以及建模后能否估计出来,这与相关时间及惯导工作时间有关系。
因此,在工程上可遵循以下建议:
(1)若相关时间很短(采样时间的10倍以内),可直接将一阶马尔可夫噪声等价为高斯白噪声,不必单独建模,即使单独建模,也不易与高斯白噪声分离开。
(2)若相关时间较长(大于采样时间的50倍),且惯导工作时间小于相关时间,n倍(n一般大于10),可针对一阶马尔科夫噪声单独建模,但此种情况下,随机常值和一阶马尔可夫不易分离,只能估计出两者之和。
(3)若相关时间较长(大于采样时间的50倍),且惯导工作时间大于相关时间n倍(n一般大于100),必须对一阶马尔可夫噪声单独建模,此时,随机常值和一阶马尔可夫易分离,采用状态扩维或量测扩维法可比较准确地估计出随机常值和一阶马尔可夫噪声。
(4)若相关时间特别长,远大于采样时间和惯导工作时间,可直接将一阶马尔可夫噪声等价为随机常值,不必单独建模,即使单独建模,也不易与随机常值分离开来。
由图5可看出,H无穷滤波估计精度较高,当θ为0.2时,与直接采用卡尔曼滤波相比,精度稍有提高。但在滤波环境很差、系统噪声和量测噪声没有很明显的规律可循时,可使用H无穷滤波,并通过参数的调整自适应改变滤波的精度和鲁棒性。因此,从工程应用角度考虑,若系统满足标准卡尔曼滤波条件,滤波环境较好时可直接采用卡尔曼滤波,若滤波环境较差,采用H无穷滤波能保证性能较稳定,不易发散,但在精度方面会有一定的损失。
通过对比表1和表2中的参数精度,可以看出,在含有色噪声的模型中,扩展KF的滤波精度比KF高;NEES显示扩展KF一致性好,KF一致性差,说明扩展KF与含有色噪声的误差模型匹配。
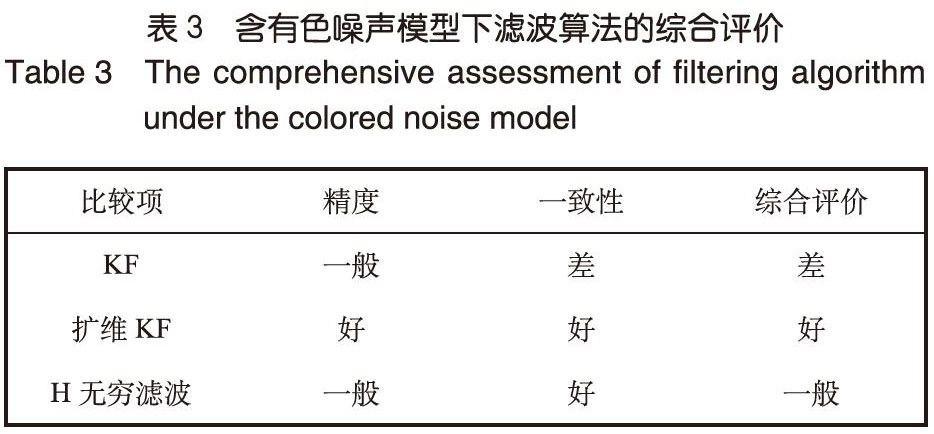
为此,含有色噪声模型下滤波算法综合评价见表3,分为好、一般、差三个等级。
2.2噪声统计特性时变滤波方法试验分析
2.2.1参数设置
Sage-Husa自适应滤波的参数设置与KF相同;改进的自适应滤波采用线性系统模型,参数设置同KF。由于实际中的噪声变化规律不能得到,所以对初始系统噪声标准差假设三种变化规律:正弦变化、线性变化和指数变化。其中,系统噪声标准差为正弦变化和线性变化时,设置自适应滤波的遗忘因子为0.85;系统噪声标准差为指数变化时,设置自适应滤波的遗忘因子为0.7。
2.2.2仿真试验
对渐消记忆指数加权Sage-Husa自适应滤波的100次蒙特卡罗仿真中,两次发散,对其他98次统计,结果见表4。对改进的自适应滤波算法的仿真试验结果如图7所示。
从表7可看出,采用改进Sage-Husa自适应滤波方法误差较大,并不能达到预想的效果。分析原因,这是因为改进Sage-Husa自适应滤波存在噪声统计特性估计和状态估计之间耦合性太强。初始条件下,噪声统计特性估计不准确,就很大程度影响了状态估計的准确性,进而相互影响,导致估计结果恶化或滤波发散。因此,在实际惯导误差模型参数标定过程中,改进Sage-Husa自适应滤波效果不理想。
从图9 (a)可以看出,当初始系统噪声标准差满足正弦变化时,采用自适应滤波的标定结果相比于卡尔曼滤波精度较高。从图9 (b)可以看出,当初始系统噪声标准差满足线性变化时,采用自适应滤波的标定结果相比于卡尔曼滤波精度较高。从图9 (c)可以看出,当初始系统噪声标准差满足指数变化时,采用自适应滤波的标定结果相比于卡尔曼滤波精度较高。
这是因为自适应滤波利用了噪声滤波器和平滑器作为噪声统计估计器。因此,在实际工程应用中,若未知系统和量测噪声统计特性,不能采用卡尔曼滤波时,可采用改进自适应滤波方法以达到相对较高的估计精度。
噪声统计特性未知或时变模型下滤波算法综合评价简述见表5。
3结束语
本文研究了惯性导航系统误差模型标定中不同的滤波方法。首先对不同条件下的滤波算法进行理论分析与总结,进而通过仿真验证多种滤波算法在惯导误差模型标定中的有效性及其适用条件,得出算法的应用建议,为惯导误差模型标定滤波方法选择提供了一定的工程应用指导,这对提高惯导误差模型标定精度具有较强的借鉴意义。
猜你喜欢
军民两用技术与产品(2021年7期)2021-10-13 08:12:10
湖北农机化(2020年4期)2020-07-24 09:07:44
汽车维修与保养(2020年11期)2020-06-09 05:42:16
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
科技视界(2016年26期)2016-12-17 15:53:57
科教导刊·电子版(2016年26期)2016-11-21 09:41:18
汽车科技(2016年5期)2016-11-14 08:03:52
光学精密工程(2016年3期)2016-11-07 09:03:34
中国新通信(2016年16期)2016-10-18 10:54:54
中国惯性技术学报(2015年1期)2015-12-19 13:11:49