
基于单基站的载人月球车相对定位技术
2018-04-26 09:37李建胜王俊亚
载人航天 2018年2期
李建胜,邢 琰,王俊亚,陈 杰
(1.信息工程大学,郑州450000;2.北京控制工程研究所,北京100081)
1 引言
随着我国月球探测的进一步推进,在没有导航基础设施的情况下,迫切需要一种利用月球基站与载人月球车之间数据链的高精度相对定位导航技术。
目前国内外对地外天体目标定位的研究主要有以下几种方法[1]:航位推算、视觉、天文、无线电以及组合导航。航位推算定位利用安装在巡视器上的里程计和惯性传感器测量其相对位置变化,结构算法简单,但误差积累大[2]。视觉导航通过安装在着陆器上的图像传感器感知相应的视觉信息,利用立体视觉测量和图像分割等技术辨别着陆器以及周边环境从而实现定位导航[3-4]。天文导航利用对自然天体的测量来确定自身位置和航向,月面定位中主要研究姿态和位置,观测对象为太阳和地球[5]。无线电定位导航通过直接或间接测定无线电信号在地月以及定位基站之间传播过程中的时间、相位差、振幅或频率的变化,确定距离、距离差、方位等定位参数,进而用位置线确定着陆器位置[6-7]。每种单一导航系统都有各自的独特性能和局限性,不能完全满足月面高精度实时定位的需求,而组合导航把几种不同的单一系统组合在一起,利用多种信息源,互相补充,构成一种有多余度和导航准确度更高的多功能系统[8-9]。在载人月球车上部署强大的计算机系统和高精度传感器比较困难,因此这些自主导航的方式如果没有第三方修正累计误差,则难以适应载人月球车的定位需求。
目前基于地面通信网络的定位导航技术研究较多,其定位技术和相关算法对月面无线电定位有一定的参考意义。定位算法的研究较为成熟,在月球环境下,部署和选择基站相对较为棘手。在测距定位算法方面,有基于TDOA(到达时间差,Time Difference of Arrival)[10]、TOA(到达时间,Time of Arrival)[11]、AOA(到达角,Angle of Arrival)[12]、混合定位[13]和载波相位[14]等。 在基站选 择 方 面, 有 利 用 FM[15]、 GSM[16]、 3G[17]、DAB[18]、DVB[19]、MW[20]等现有的无线电发射装置做为定位的基站。而在地外探测器测量中,Liu Q[21]、LI R[22]等研究了通过测站发送侧音信号利用USB/UXB和VLBI系统实现对地外探测器的测量定位;李雪等[23]研究了基于异步传输帧非相干扩频通信/测距体制和双UHF天线短基线载波相位干涉测角方法的精确定位技术。总的来说,以卫星导航系统为代表的无线电定位方法在地面上发展较为成熟,并且催生基于现有基站进行机会信号导航的研究。但是对于采用无线电定位的地外天体探测,基站的部署将会是一个难题。
本文提出一种利用地外天体探测器与定位基站或者基地之间的数据链的单基站相对定位技术,通过阵列天线实现测角和TOA测距实现相对定位,以期在资源严重受限的外太空实现探测器的单基站定位。
2 单基站定位原理及误差分析
本文提出的基于天线阵列的单基站定位原理如图1所示。该方法使用带天线阵列的单个参考基站同时测量目标节点与参考基站之间的距离和目标节点所发射脉冲到达参考基站的到达角度,从而获得目标的相对三维位置。
假设参考基站坐标为(0,0,0),则目标节点距参考基站的相对位置如式(1)所示:

图1 单基站定位原理图Fig.1 Positioning principle of signal base station

针对二维的情况,其定位原理如图2所示:

图2 二维情况下单基站定位原理Fig.2 Positioning principle of signal base station in 2D

2.1 TOA测距
以BD2为代表的定位基站导航系统使用TOA无源测距技术,即定位基站发射无线电信号,目标节点接收并解码信号发送时间,结合本地钟测量的接收时间,即为无线电信号在空间中的飞行时间,飞行时间乘以光速即为定位基站距目标节点的距离。这种测距方式的精度取决于信标和基站之间的时间同步精度[24]。
基于TOA的方式进行测距通常会考虑时钟的影响而采取一些策略减小测距误差[25],针对没有本地高精度时钟基准的情况下,实际应用系统通常采用图3所示双向TOA来进行测距:在t1时刻,由目标节点发起询问通信;t2时刻,对应定位基站收到信息,并于t3时刻发送确认信息;目标节点在t4时刻收到定位基站的确认信息,并在t5时刻发送计算距离命令;定位基站在t6时刻收到目标节点的命令,计算目标节点和定位基站的距
假设参考基站坐标为(0,0),则目标节点距参考基站的相对位置为式(2):离并于t7时刻将距离发送给目标节点;目标节点于t8时刻收到定位基站发送的距离信息,至此,单次的测距完成,定位基站到目标节点的距离如式(3):


图3 双向飞行时间测距原理Fig.3 Ranging by two-way flight time
其中,c为电磁波在真空中的传播速度。t2、t3、t6和t7是锚节点测量的时刻,用的是锚节点上的晶振时钟基准,而t1、t4、t5和t8是定位节点测量的时刻,用的是定位节点上的晶振时钟基准,从中可以看出误差主要来自三个方面:对通信信号的TOA估计误差、月面目标时钟误差和节点硬件电路的延迟,其中对通信信号的TOA估计误差占主要部分。
测控站的时钟存在时间偏差和频率漂移,建模后会产生一定的钟差残存差异。为确保每一个测控站都在一个统一的时间基准内,各测控站的钟差表述为式(4):

其中,af0表示钟偏,af1表示时钟频率偏差,af2表示时钟频率漂移。其对测距的影响为式(5):

其中,TR和ΔtR表示接收机真实接收时间和接收机钟差,TS和ΔtS表示发射机真实发射时间和发射机钟差。时钟偏差服从式(6)所示正态分布,即随着工作时间的增加,其方差逐渐增加。以常见的1 ppm、24 MHz时钟为例,其误差方差如式(7),对测距的影响(c=299 792 458 m/s,测程为1 km时)为式(8),可见在计算TOA测距误差时,可以忽略钟差造成影响。
可得在1 km时,时钟误差对测距的影响服从分布: ε1km~ N(0,0.001)。
2.2 TOA测距误差
在月面的无线通信系统中,影响测距精度的主要因素是多径效应[26],其无线信号的多径效应服从式(8)所示莱斯分布:
式中,A是主信号的峰值,I0是0阶第一类修正贝塞尔函数,σ是多径分量方差,定义莱斯因子K如式(9),表征主信号功率与多径分量方差之比,决定莱斯分布,其分贝表达式如式(10)[27]:
多径效应对测距的影响服从式(8)的概率密度分布,并且与环境关系较大,σ需要实地测量建立模型,对于月面通信环境,一般取 K在5~20 dB[26]。
2.3 阵列天线测角
阵列天线按照一定的规则排列,由于各天线阵元接收到的信号具有一定的波程差,导致接收机接收到信号时的相位不尽相同,因此可以通过图4所示测相的方式测量基站信号的入射角。

图4 阵列天线测角原理Fig.4 Angle measurement principle of array antenna
其中,d为天线阵元间距,θ为入射角,φ为相位差,λ为波长。由图4可知式(11)所示几何关系,从而求得方向角如式(12):
从式(12)中可以看出,此种方法进行方向角测量取决于天线基线长度和通信信号中心频率,方向角的测量精度与阵列天线阵元基线长度成正比,但是在月球基站上基线长度不可能做很长。为了解决该问题,本文采用脉冲幅度来取代脉冲到达时间作为被测量[28-29],以实现高精度AOA的测量。
2.4 阵列天线设计及其误差分析
为了方便利用信号幅度进行侧向,本文利用四个定向天线组合设计全向阵列天线。单个天线的结构图和方向图如图5所示,结构参数见表1。
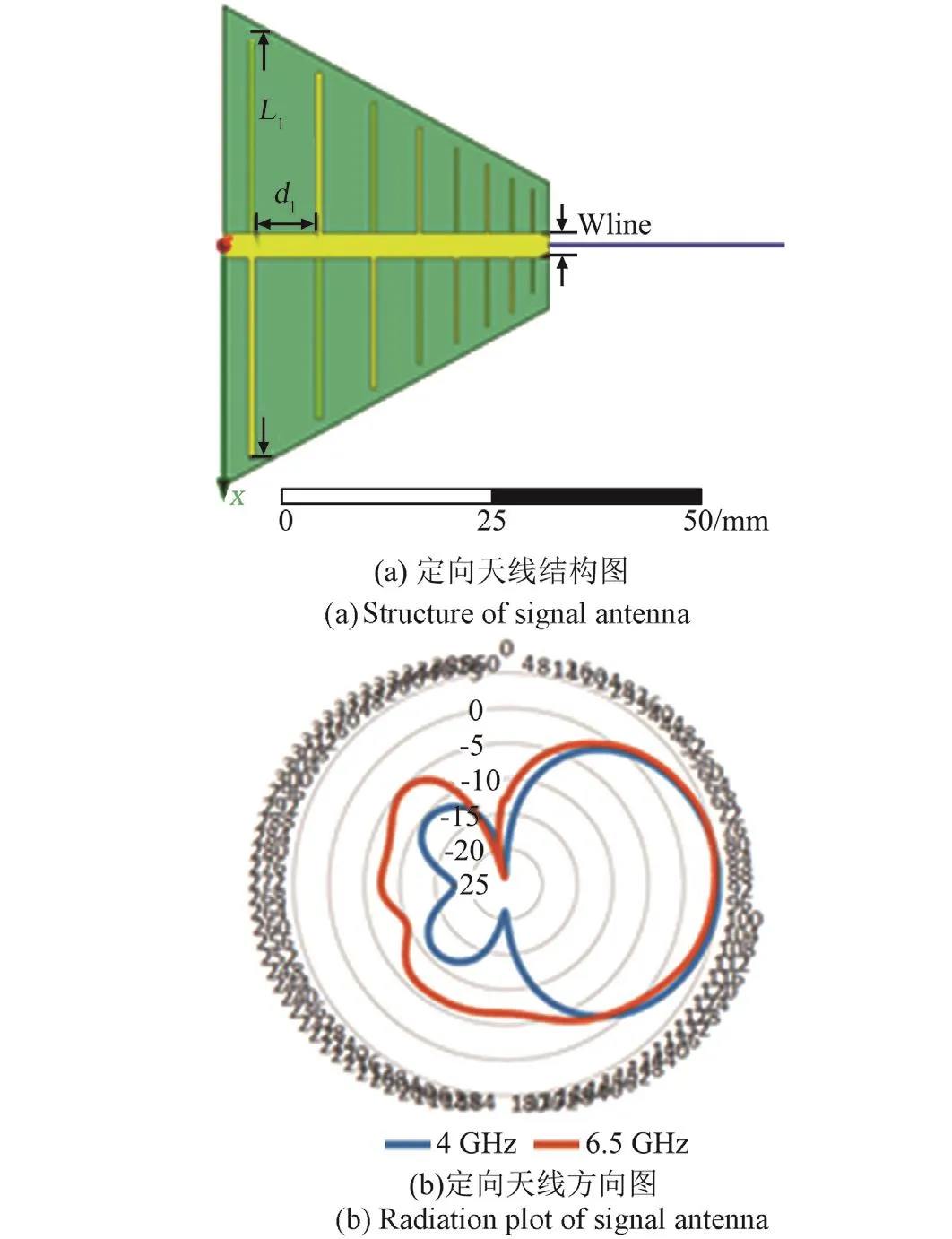
图5 单个定向天线结构与方向图Fig.5 Single array antenna structure and its radiation

表1 阵列天线参数Table 1 Parameters of array antenna
四阵元阵列天线的理想方向图(图7)可由定向天线理想方向图(图6)叠加而来。

图6 阵列天线结构及其方向图Fig.6 Array antenna structure and its radiation

图7 阵列天线理想方向图Fig.7 Desired radiation plot of array antenna
假设按照图7所示的角度,即X轴正方向为0°,Y 轴正方向为 90°,第 0、1、2、3 号天线波束的轴线角分别为 0、90°、180°、270°。 假设每个天线具有一致的幅度特性,其方向图对应函数为F(θ),因此在每个45°区间内,均有两个相邻天线的接收信号最强,根据两个最强天线即可得到到达角度。假设信号入射方向角为θ,此时第n个天线方向可表示为式(13):

式中,θ0为天线波束的轴线间距,如图6所示为90°,k是一个常量。假设天线的半功率波束宽度为α=,由式(13)可知,第0个天线的方
设第m和第m-1号天线接收到的信号幅度分别是 Fm和Fm-1,Nm和Nm-1分别是零均值的高斯分布,且其方差取值范围为信号强度A的1%-10%,假设比例为i,则Fm和Fm-1可表示为式(14)、(15)[30]:

可得方向角如式(17):

从式(17)可以看出,影响方向角测量精度的影响因素主要有阵列天线阵元数n和相邻天线阵元间的幅度比R。其中阵元数n的选择通常与定位系统的整体指标有关系。
3 系统性能分析
为分析基于单基站的载人月球车定位方法的精度,本文根据实际情况进行仿真。载人月球车的活动范围一般在几百米,载人月球车与月球基站的通信使用高频无线信号通信,目标是测距的估计误差在10 m以内,具体仿真条件设定如下:
采用文献[31]的定位算法,假设月球基站距载人月球车最大距离为1 km,位置估计的误差来源主要有TOA测距估计误差和AOA测角估计误差,在IEEE 802.11提供的信道模型空间环境下,采用2 GHz到10 GHz的通信信号。利用最大概率TOA估计方法对空间信道测距进行仿真研究,使用伪码非相干测距体制,利用了扩频码良好的自相关性能,估计TOA的测距估计误差可控制在10 m[32]之内。 分别取测距误差为 0、1 m、5 m、10 m,分析AOA和TOA估计误差对定位精度的影响。为了比较定位精度,计算不同情况下定位算法的均方根误差RMSE如式(18):

1)参考基站的坐标为 (0,0) ;
2)目标节点的真实坐标为(0,1000);
3)N=10000,即进行一万次仿真。
得到打靶结果如图8,AOA和TOA估计误差各自对定位精度的影响如图9。

图8 位置仿真打靶图Fig.8 Map of location shooting simulation
从图9可以看出,RMSE准则下满足定位精度为8.95 m,纵向误差为4.77 m(受测距精度影响),并且由于非视距误差均会增加测量距离,因此纵向误差均为正值,即均大于1 km。横向误差为7.26 km(受测角精度影响),则测角精度约为0.8°。
4 结论
本文设计的基于卫星通信数据链的单基站地外天体目标定位导航方式,通过阵列天线接收信号幅度进行测角,估计精度可以达到1°,利用双向飞行时间进行测距,测距估计精度10 m@1 km(3σ)。此方法充分利用了已有的通信数据链资源,并且对时间同步精度要求不高,不需要部署强大的计算系统和传感器,同时又不牺牲定位精度。
参考文献(References)
[1] 岳富占,崔平远,崔祜涛.月球巡视探测器定位技术研究[J]. 机器人,2006,28(2):235-240.Yue Fuzhan,Cui Pingyuan, Cui Gutao.Research on localization technologies for Lunar rovers[J].ROBOT, 2006, 28(2): 235-240.(in Chinese)
[2] 刘传凯,王保丰,王镓,等.嫦娥三号巡视器的惯导与视觉组合定姿定位[J].飞行器测控学报,2014,33(3):250-257.Liu Chuankai, Wang Baofeng, Wang Jia, et al.Integrated INS and vision-based orientation determination and positioning of CE -3 lunar rover[J].Journal of Spacecraft TT & C Technology, 2014, 33(3): 250-257.(in Chinese)
[3] 王保丰,周建亮,唐歌实,等.嫦娥三号巡视器视觉定位方法[J].中国科学: 信息科学,2014,44(4):452-460.Wang Baofeng, Zhou Jianliang, Tang Geshi, et al.Research on visual localization method of lunar rover[J] Sci China Inf Sci, 2014, 44(4): 452-460.(in Chinese)
[4] 徐辛超,徐爱功,刘少创,等.月面巡视器近距离单摄站定位及精度分析[J]. 测绘科学,2015,40(3):3-7.Xu Xingchao, Xu Aigong, Liu Shaochuang, et al.Lunar rover positioning and precision analysis for single closed station based on image[J].Science of Surveying and Mapping,2015, 40(3): 3-7.(in Chinese)
[5] 张金亮,秦永元,吴枫.捷联惯导基于星体跟踪器的高精度初始对准算法[J].中国惯性技术学报,2013(1):22-25.Zhang Jinliang, Qin Yongyuan, Wu Lan, et al.Precise SINS initial alignment algorithm based on star tracker[J].Journal of Chinese Inertial Technology, 2013(1): 22-25.(in Chinese)
[6] 张宇,曹建峰,谢剑锋,等.基于地基无线电测量的月面目标精确定位技术研究[J].电子测量与仪器学报,2013, 27(10):907-915.Zhang Yu, Cao Jianfeng, Xie Jianfeng, et al.Lunar object positioning research based on ground-based radiometric tracking technique[J].Journal of Electronic Measurement and Instrument, 2013, 27(10): 907-915.(in Chinese)
[7] 李培佳,黄勇,昌胜骐,等.基于地基观测的嫦娥三号着陆器与巡视器高精度定位[J].科学通报,2014(32):3162-3173.Li Peijia, Huang Yong, Chang Shengqi, et al.Positioning for the Chang’E-3 lander and rover using Earth-based observations[J].Chinese Science Bulletin, 2014(32): 3162-3173.(in Chinese).
[8] Tapley B D,Schutz B E,Born G H.Statistical orbit determination[J].Statistical Orbit Determination, 2004, 39(3):525-536.
[9] Carle P J F,Furgale P T,Barfoot T D.Long-range rover localization by matching LIDAR scans to orbital elevation maps[J].Journal of Field Robotics, 2010, 27(3):344-370.
[10] Fisher K A.The Navigation Potential of Signals of Opportunity-based Time Difference of Arrival Measurements[D].Ohio,USA: Air Force Institute of Technology,2005.
[11] Merry L A,Faragher R M,Scheding S.Comparison of opportunistic signals for location[C]//Proceedings of the 7th IFAC Symposium on Intelligent Autonomous Vehicles,Lecce,Italy.2010:6-10.
[12] 张浩,刘兴,Gulliver,等.基于单基站天线阵列的超宽带定位AOA估计方法[J].电子与信息学报,2013,35(8):2024-2028.Zhang Hao, Liu Xing, Gulliver T A, et al.AOA estimation for UWB positioning using a mono-station antenna array[J].Journal of Electronics& Information Technology,2013,35(8): 2024-2028.(in Chinese)
[13] Taponecco L, D’Amico A A, Mengali U.Joint TOA and AOA estimation for UWB localization applications[J].IEEE Transactions on Wireless Communications, 2011, 10(7):2207-2217.
[14] Yang C, Nguyen T, Venable D, et al.Cooperative position location with signals of opportunity[C]//Aerospace & Electronics Conference(NAECON),2009:18-25.
[15] Robinson M, Ghrist R.Topological localization via signals of opportunity[ J].IEEE Transactions on Signal Processing,2012, 60(5): 2362-2373.
[16] Yang C, Nguyen T, Blasch E.Mobile positioning via fusion of mixed signals of opportunity[J].IEEE Aerospace & Electronic Systems Magazine, 2014, 29(4):34-46.
[17] 刘蔚,康永.一种导航新技术:协作机会导航[J].现代导航,2015,6(1):71-75.Liu Wei, Kang Yong.A new navigation technology:collaborative opportunistic navigation[J].Modern Navigation, 2015,6(1):71-75.(in Chinese)
[18] 金晓岑.基于协作和机会信号的无线定位技术研究[D].北京:北京交通大学,2015.Jin Xiaocen.Research of Wireless Location with Cooperative Technology and Signal of Opportunities[D].Beijing:Beijing Jiaotong University 2015.(in Chinese)
[19] 苏敏,秦红磊.调频广播定位技术的研究[J].导航定位学报,2015,3(4):44-49.Su Min,Qin Honglei.Research on Location with FM broadcasting signal[ J].Journal of Navigation and Positioning.2015, 3(4): 44-49. (in Chinese)
[20] 何峰,吴乐南.基于数字电视无线广播信号的定位模型和系统[J]. 东南大学学报(自然科学版), 2006, 36(5):690-694.He Feng,Wu Lenan.Positioning models and systems based on DTV broadcasting signals[J].Journal of Southeast University, 2015, 3(4): 44-49.(in Chinese)
[21] Liu Q,Kikuchi F,Matsumoto K,et al.Same-beam VLBI observations of SELENE for improving lunar gravity field model[J].Radio Science, 2010, 45(2):1-16.
[22] Li R, Di K, Matthies L, et al.Rover location and landing site mapping technology for the 2003 Mars exploration rover mission[J].Journal of Photogrammetric Engineering & Remote Sensing, 2004, 70(1):77-90.
[23] 李雪,徐勇,王策,等.利用月面链路的月球车定位体制[J]. 北京航空航天大学学报,2008,34(2):183-187.Li Xue, Xu Yong, Wang Ce, et al.Position of rover by UHF communication link on Lunar surface[J].Journal of Beijing University of Aeronautics and Astronautics, 2008, 34(2):183-187.(in Chinese)
[24] 李天文.GPS原理及应用[M].第2版.北京:科学出版社,2010.Li Tianwen.GPS Theory and Practice[M].2ndEdition.Beijing: Science China Press, 2010.(in Chinese)
[25] Ouyang R W,Wong A S,Woo K T.GPS localization accuracy improvement by fusing terrestrial TOA measurements[C]//Communications(ICC), 2010 IEEE International Conference on.IEEE,2010:1-5.
[26] Kaiser M L, Alexander J K.Source location measurements of terrestrial kilometric radiation obtained from lunar orbit[J].Geophysical Research Letters, 1976, 3(1): 37-40.
[27] Abdi A, Tepedelenlioglu C, Kaveh M, et al.On the estimation of the K parameter for the Rice fading distribution[J].IEEE Communications Letters, 2001, 5(3): 92-94.
[28] Porretta M, Nepa P, Manara G, et al.A novel single base station location technique for microcellular wireless networks:description and validation by a deterministic propagation model[J].IEEE Transactions on Vehicular Technology, 2004,53(5): 1502-1514.
[29] Chen B H, Chiang T C, Tekin I.Location finding using a single base station in CDMA/TDMA systems: U.S.Patent 6,300,905[P].2001-10-9.
[30] 张浩,刘兴,Gulliver,等.基于单基站天线阵列的超宽带定位AOA估计方法[J].电子与信息学报,2013,35(8):2024-2028.Zhang Hao, Liu Xing, Gulliver T A et al.AOA estimation for UWB positioning using a Mono-station antenna array[J].Journal of Electronics& Information Technology,2013,35(8):2024-2028.(in Chinese)
[31] Taponecco L, D’Amico A A, Mengali U.Joint TOA and AOA estimation for UWB localization applications[J].IEEE Transactions on Wireless Communications, 2011, 10(7):2207-2217.
[32] 王满,宋鹏,齐建中.一种无线数据链测距技术的研究与实现[J]. 测控技术,2013,32(12):57-60.Wang Man, Song Peng, Qi Jianzhong.Research and implementation of ranging technology for a wireless data link[J].Measurement& Control Technology,2013,32(12): 57-60.(in Chinese)
猜你喜欢
导航定位学报(2022年4期)2022-08-15
成都信息工程大学学报(2022年2期)2022-06-14
移动通信(2019年2期)2019-03-27
百科知识(2019年5期)2019-03-18
电子制作(2019年24期)2019-02-23
电子制作(2019年24期)2019-02-23
电子制作(2019年23期)2019-02-23
发明与创新·大科技(2018年2期)2018-03-17
CHIP新电脑(2016年7期)2016-07-18
太空探索(2016年9期)2016-07-12
