钢筋笼液压自动支撑装置研究
2018-04-18 10:37:08王德民刘荣帅吴红刚王鹏宇
机械 2018年3期
王德民,刘荣帅,吴红刚,王鹏宇
钢筋笼液压自动支撑装置研究
王德民,刘荣帅,吴红刚,王鹏宇
(长春理工大学 机电工程学院,吉林 长春 130022)
针对传统钢筋笼支撑装置存在的工作效率低、自动化程度低等问题,设计了新型液压自动支撑装置,并详细介绍液压支撑的原理。通过CATIA软件建立三维模型,然后利用有限元分析软件Workbench对支撑装置进行特征值屈曲分析,采用Block Lanczos方法求出它的屈曲特征值以及特征值屈曲模态。分析结果表明,支撑装置的强度满足要求,不会发生屈曲现象。
支撑装置;Workbench;特征值;屈曲分析
钢筋笼滚焊机由于机械化程度高、加工速度快、质量稳定可靠等优点被广泛应用在建筑工程中,尤其是在钻孔灌注桩、挖孔桩、立柱等作业中发挥重要作用[1]。当钢筋笼焊接到一定长度时,由于钢筋笼重力作用向下产生弯曲变形,影响后续焊接工作的正常进行,并且钢筋笼焊接质量无法满足规范要求,必须配置钢筋笼支撑装置来支撑成型的钢筋笼[2]。
传统的支撑装置由于结构不稳定、自动化程度低,已经无法满足现代机械工程的要求。而且由于成型的钢筋笼质量大,在外界扰动作用下,支撑装置可能发生屈曲变形而失稳,对钢筋笼的焊接工序产生影响,甚至会发生员工事故等危险。
本文中所设计的新型钢筋笼支撑装置,针对主要的支撑部件进行屈曲分析,以屈曲安全系数作为设计标准,以保证结构的稳定性和安全性能[3]。
1 支撑装置结构及原理
1.1 装置结构
钢筋笼支撑装置,俗称“托料架”,整体结构如图1所示。由于液压支撑装置要求各部件之间有相对转动,各零件之间主要通过柔性连接(铰接),固定部分主要采用螺栓连接和焊接方式。底座通过螺栓连接与地面上的导轨固定,动力部件油缸与底架采用柔性连接,在举升过程中油缸可绕其后轴旋转。活塞杆铰接并驱动连接板的一端,连接板另一端与摆架焊接固定在一起,摆架通过两端固定的摆架轴铰接在底座上,连接套外径贯穿摆架并焊接固定,连接套内径有铰接轴穿过。拉杆的一端铰接在底座上,另一端铰接托架组件的一端,同时托架的另一端铰接摆架的另一端。托辊部件的底座通过螺栓连接固定在托架上。
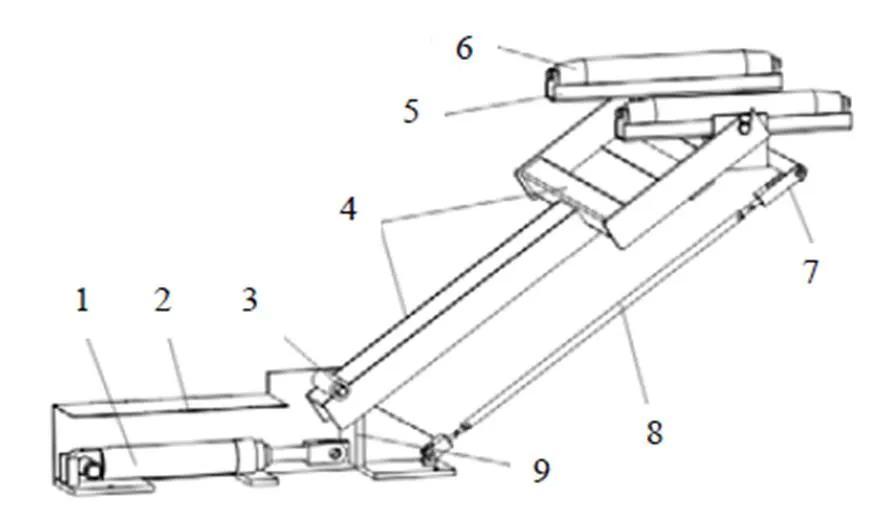
1.油缸2.底座3.摆架轴4.摆架组件5.辊筒 6.托辊部件7.托架组件8.拉杆组件9.连接板
为了保证承载的稳定性,装置采用平行四边形机构,摆架、拉杆、托架与底架组成铰接四杆机构,根据曲柄存在条件其属于平行双曲柄机构[4]。这种机构可使托辊部件始终保持平行移动﹐且摆架与拉杆转动的角位移﹑角速度和角加速度也始终相等。这样在油缸推力作用下保证装置匀速上升,平稳的支撑钢筋笼。
为了减少额外的功耗,采用滚筒支撑钢筋笼,在滚筒内部安装深沟球轴承,用于承受径向载荷,滚筒与钢筋笼一起转动。传统的托料架带有两个相互平行导向板,钢筋骨架在导向板上滑动,长时间工作时会造成导向板与钢筋骨架接触部分磨损,在钢筋笼转动时也会增加旋转电机的负载。因此改滑动摩擦变为滚动摩擦,大大减小了摩擦力,长期工作不会产生磨损,钢筋笼旋转时大大减轻了电机的负载。
1.2 工作原理
钢筋笼滚焊机布局如图2所示,包括定盘、动盘、分料盘与托料架等。工作时钢筋笼主筋在定盘夹紧固定,利用动盘上的焊接装置进行焊接。动盘在焊接的同时做移动和旋转两个运动,当动盘移动一定位移时(一般4 m),动盘上的传感器检测到导轨上的挡板,给控制器发送信号,控制器通过液压阀控制油缸运动[5],推动托料架升起相应的高度支撑成型的钢筋笼;当焊接结束时输入下降命令,托料架承载着成型的钢筋笼下降。

图2钢筋笼滚焊机布局图
液压自动支撑装置在接收上升信号后抬起,接触钢筋笼时达到平衡状态。当支撑装置托举不同直径钢筋笼时,装置升起不等的高度。根据力矩平衡原理[6],钢筋笼的重力矩与装置的支撑力矩平衡,即输入一定的油压信号会使支撑装置升起相应的高度,以此实现对不同规格钢筋笼的托举。
2 屈曲分析理论
屈曲分析主要用于研究结构在特定载荷下的稳定性以及确定结构失稳的临界载荷,线性屈曲分析或特征值屈曲分析预测的是理想线弹性结构的理论屈曲强度(分歧点);而非理想和非线性行为阻止许多真实的结构达到他们理论上的弹性屈曲强度。
结构屈曲的临界载荷可表示为:
式中:P为作用载荷;λ为屈曲特征或屈曲载荷因子。
特征值屈曲分析实质即求解特征值方程:

式中:[K]为结构总体弹性刚度矩阵,即小位移的线性刚度矩阵;[K]为结构总体几何刚度矩阵;{}为特征位移向量。
线性屈曲通常产生非保守的结果,但是线性屈曲比非线性屈曲分析计算更节省时间,并且应当作第一步计算来评估临界载荷(屈曲开始时的载荷);线性屈曲分析可以用作决定产生什么样的屈曲模型形状的设计工具,为设计作指导,因此被广泛采用[7-8]。
ANSYS软件对结构进行线性屈曲分析的步骤为:建立模型;获得静力解;获得特征值屈曲解;扩展解并后处理。
3 结构仿真
3.1 建立有限元模型
考虑ANSYS对大型三维建模局限性,本文利用CATIA对主要支撑部件三维建模,为保证仿真结果真实性,未对支撑部件做任何简化,将其导入ANSYS Workbench 16.0,如图3所示。
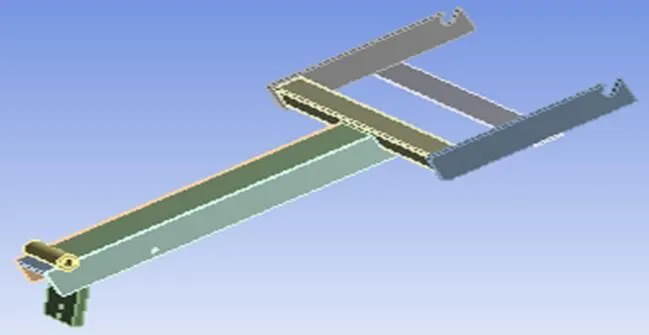
图3 支撑部件有限元模型
钢筋笼的材料选结构钢,杨氏模量=2×1011,泊松比=0.3,密度=7.85*103kg/m3。进行网格划分时采用Workbench中自带的网格划分工具,划分节点数162278、单元数28709;通过查看网格划分质量,可知网格划分良好,网格划分如图4所示。
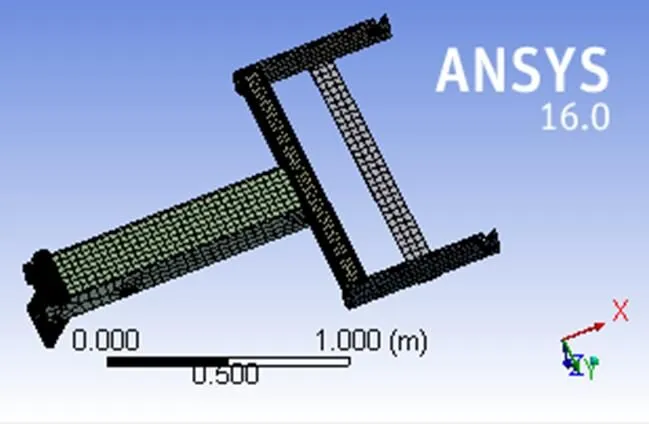
图4 网格划分图
3.2 特征值屈曲分析
首先对结构三维模型加载约束与载荷:在支撑部件底端的连接板处施加固定约束,限制各个方向的位移与转动;在支撑部件的摆架上端施加钢筋笼的作用载荷。钢筋笼焊接完成后由托料架平均承担,最大规格钢筋笼质量为2 t,此时钢筋笼长度为24 m。因此每台支撑装置承载的重量为3333 N。
对机构进行静力学分析,求得其静力解,得到支撑部件的等效应力云图,如图5所示,可以看出,在钢筋笼重力载荷作用下所受最大应力为105.33 MPa,小于结构钢的屈服极限[]=235 MPa。然后利用Block Lanczos方法计算屈曲特征值以及特征值屈曲模态,得到结构的第一阶屈曲模态如图6所示,前6阶屈曲特征值以及对应的临界载荷如表1所示,可以看出第一阶屈曲载荷因子为84.1,对应的临界屈曲载荷为280.3 kN,因此当支撑装置承受载荷达到此值时才会失稳。
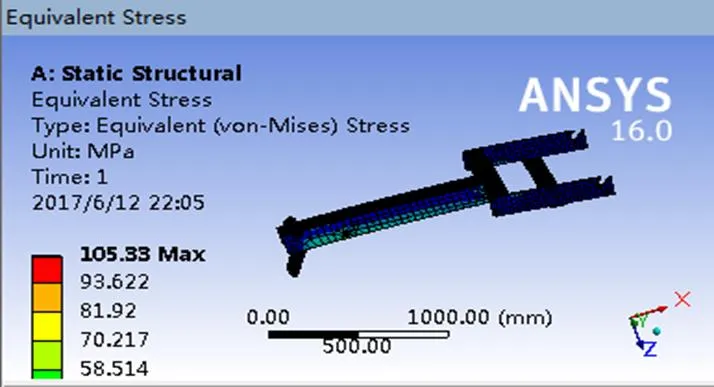
图5 等效应力云图
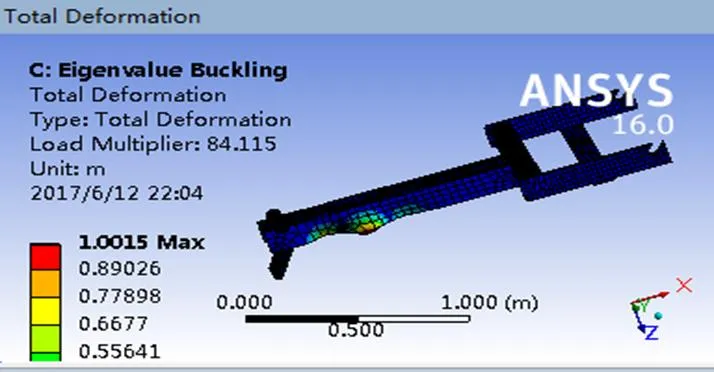
图6 第一阶特征值屈曲模态
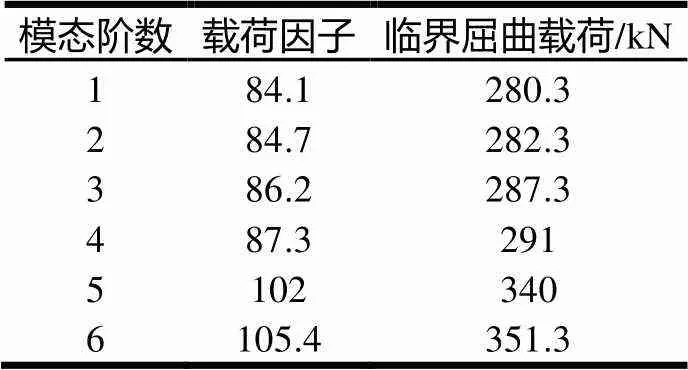
表1 前6阶屈曲临界载荷
4 结论
本文对钢筋笼的支撑装置进行改进,提出采用液压托举的方法和装置,并详细阐述了新型支撑装置的机械结构和工作原理。静力学分析与特征值屈曲分析结果表明:无论是托举过程中还是下降过程中,支撑装置受到的最大应力在结构的许用应力范围内满足强度要求,并且结构稳定。因此新型液压支撑装置能够满足对钢筋笼的支撑。
[1]孙小霞. 钢筋笼滚焊机在施工中的应用[J]. 北方交通,2011(5):158-160.
[2]赵瑞军. 创新技术在管桩滚焊机中的应用[J]. 混凝土与水泥制品,2014(10):76-78.
[3]李国强,郭小康. 基于可靠度理论的屈曲约束支撑节点连接设计原则[J]. 建筑结构,2010(3):65-67.
[4]高广娣,朱荣光,毕新胜. 双曲柄机构输出不均衡运动特性与杆长间的相关性研究[J]. 机械传动,2013(6):26-27.
[5]郁凯元. 三通型先导比例减压阀的研究[J]. 液压与气动,1991(1):9-12.
[6]刘鸿文. 材料力学(第五版)[M]. 北京:高等教育出版,2010.
[7]黄宇锋,梁尚明,闫喜江. 基于ANSYS的ITEER重力支撑系统特征值屈曲分析[J]. 机械设计与制造,2009(1):74-76.
[8]屠凤莲,范顺成,罗文龙. 基于ANSYS的支撑架特征值屈曲分析[J]. 河北工业大学学报,2010(3):6-10.
Research on Hydraulic Automatic Support Device of Steel Reinforcement Cage
WANG Demin,LIU Rongshuai,WU Honggang,WANG Pengyu
( College of Mechanical and Electric Engineering, Changchun University of Science and Technology, Changchun 130022, China)
In view of the low efficiency and automation of the traditional support device in steel cage, a new type of hydraulic automatic support device is designed, and the principle of hydraulic support is introduced in detail. The 3D model is established by CATIA, then the eigen value buckling analysis of the support device is performed by using the finite element analysis software Workbench, and calculate the buckling characteristics and the eigen value buckling mode by using Block Lanczos method. The analysis results show that the strength of the support device can meet the requirement and the buckling will not happen.
support device;Workbench;eigen value;buckling analysis
TU312
A
10.3969/j.issn.1006-0316.2018.03.006
1006-0316 (2018) 03-0023-04
2017-06-21
王德民(1961-),男,辽宁西丰人,本科,副研究员、硕士研究生导师,主要研究方向为机电系统控制与技术。
猜你喜欢
数学物理学报(2021年5期)2021-11-19 07:01:12
装备制造技术(2021年1期)2021-05-21 07:54:46
舰船科学技术(2021年12期)2021-03-29 01:28:16
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19 08:38:40
山西建筑(2019年10期)2019-04-01 10:55:34
制造技术与机床(2018年9期)2018-09-19 06:48:16
海外华文教育(2017年6期)2017-08-07 03:11:00
水电站机电技术(2016年1期)2016-02-28 14:21:50
东北电力大学学报(2015年1期)2015-11-13 05:20:25
四川轻化工大学学报(自然科学版)(2014年3期)2014-04-16 03:56:42