码垛机器人的分类及应用
2018-04-18 10:37:22黎显伟
机械 2018年3期
黎显伟
码垛机器人的分类及应用
黎显伟
(四川省机械研究设计院,四川 成都 610063)
工业机器人替代人工具有显著优势,智能化的工业机器人是适应全球进入工业4.0的时代需要。作为智能化工业机器人的细分领域,码垛机器人在自动化生产中对提高生产效率起到了关键作用。对线性运动起重机式码垛机器人、机械臂式码垛机器人、并联杆式码垛机器人的结构、特点、应用进行分析,并对码垛机器人智能化实现方式——RFID(电子标签)、机器视觉以及人机交互路径学习等先进技术进行分析。智能化码垛机器人具备的强适应性以及动态问题解决能力,可在中国工业向工业4.0迈进以及在中国制造2025目标实现过程中,广泛应用于自动化生产和智能制造。
工业机器人;码垛机器人;智能化;工业4.0;中国制造2025
中国社会的老龄化问题正逐渐暴露,在工业生产方面最集中体现在适龄劳动人口数量的减少。从2004年开始,沿海各地就已经开始出现用工荒、民工荒。伴随而来的问题则是劳动力缺失,以及劳动力成本上涨。
我国可以从德国工业发展中借鉴的经验就是在工业生产中引入工业机器人来代替人工进行简单重复的工作。总体来说,引入工业机器人将带来以下三个优势:
(1)经济性:虽然在起步阶段需要投入大量资金来重新排布生产线,但在维护方面则比日益高昂的人工费要实惠很多。如若排布得当、订单持续,随着时间的推移和生产的继续,将前期投入和维护成本平摊在整个生产周期的话,引入工业机器人相比于人工生产将是一个非常经济的方案。
(2)高效性:理论上在没有故障的情况下机器人可以不间断工作。在完成同一套动作的情况下,如果机器人所用时间不多于人工所用时间,那么整个生产的效率将会得到显著提升。
(3)高质量:机器人相对于人来说,犯错的概率要小很多。如果前期排布校准得当,在相当长时间内,机器人生产可以实现零错误。这对产品整体质量的提升都是有显著帮助的。
然而简单的重复机械动作的机器人已然不能适应新时代背景下的生产环境。新时代环境下的市场正在逐渐被更系统地分层分块,顾客对产品有了更多自定义的独特要求。大规模标准化产品的生产已不再广泛适用于依赖动态市场的企业,尤其是中小企业。企业需要将产品的定位与研发重心更多地放在用户定制上。那么就正如德国工业4.0概念及中国制造2025目标所倡导的一样,整个工业生产要向智能化迈进。相对应的直接在工业流水线上参与工业生产的工业机器人,也需要实现智能化,以此来适应顺应市场导向的动态的生产需要。
1 码垛机器人
物流是现代化生产中的一个重要组成部分,物流效率的高低直接影响整个企业的生产效率。自动化是提高物流效率的一个关键步骤,具体的措施之一就是在物流环节中引入码垛机器人。码垛机器人,是机械与计算机程序有机结合的产物,它能极大程度节省劳动力、节省空间,除此还具备运作灵活精准、快速高效、稳定性高、作业效率高的特点。
从结构上来分析,现有的码垛机器人总体可以分为线性运动起重机式码垛机器人、机械臂式码垛机器人、并联杆式码垛机器人三类[1]。
1.1 线性运动起重机式码垛机器人
线性运动起重机式码垛机器人的普遍结构如图1所示[2],其构造相对简单,主要由滑轨、线性活动电机和夹具(执行机构)构成。从运动学上分析,该类码垛机器人的夹具活动方向固定,多为上下运动,只能满足较简单的堆砌或者垂直抓取的动作。图2为德国roteg公司DERO 1型机器人。

图1 线性运动起重机式码垛机器人的普遍结构及夹具工作空间[3]
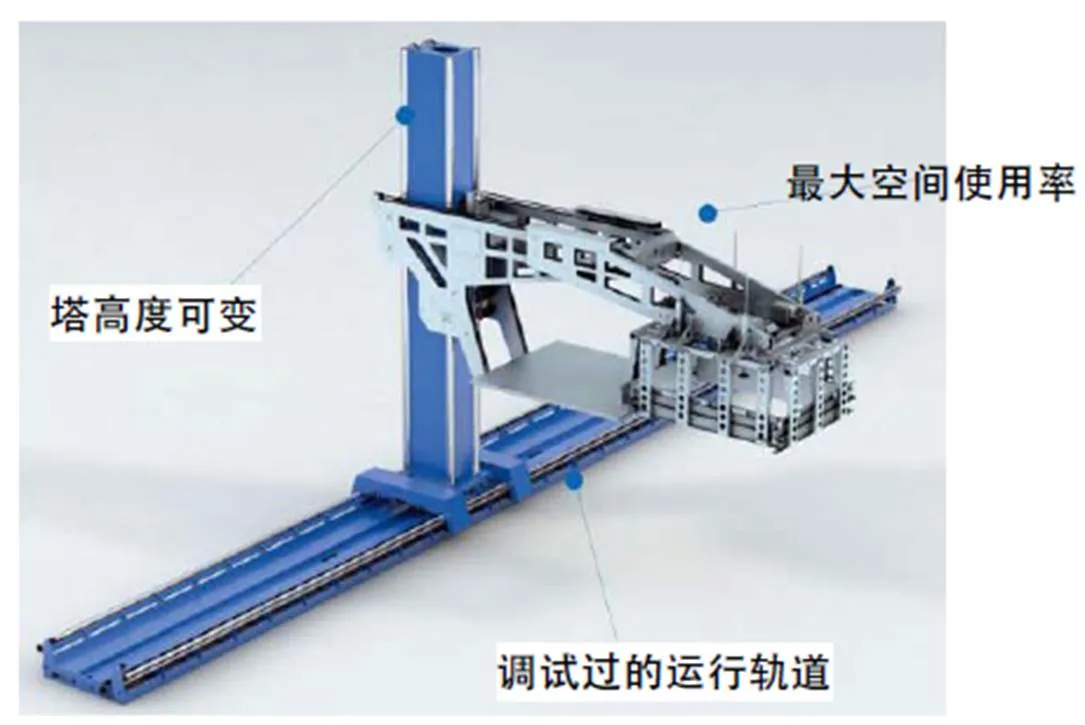
图2 德国roteg公司DERO 1型机器人
相比其他两类码垛机器人,线性运动起重机式码垛机器人具有以下特点:
(1)结构简单,造价低;
(2)夹具运动可以拆分为三个平移方向运动的线性组合,夹具运动方式简单,电机控制方法简单;
(3)通过加大承重梁与承重柱的尺寸以及加大电机的功率,可以提升夹具的起重能力;
(4)简单的结构造成了夹具活动方式的限制,夹具只能实现平行平面间物质的运输。
1.2 机械臂式码垛机器人
机械臂式码垛机器人从广义上来讲是指采用了仿生学设计,通过几个关键承重杆和关节机构的串联来模拟人体手臂的形态,利用夹具来完成码垛工作的机械臂。从具体夹具(执行机构)的活动范围来看,该类型机器人又细分为SCARA式和立体式。
1.2.1 SCARA式码垛机器人
SCARA式码垛机器人可以视为从线性运动起重机式码垛机器人到机械臂式码垛机器人的过渡,如图3所示。相比于线性运动起重机式码垛机器人,在组成构件上,SCARA式码垛机器人在相应关节处通过旋转运动关节代替了线性运动关节。与之对应的,SCARA式码垛机器人的夹具(执行机构)从起始位置移动到目标位置的运动也不再是三个方向线性运动的叠加,而是几个旋转关节的扇形运动和最后执行机构垂直方向线性运动的叠加[2]。

Doppelarm-Scara-Roboter Scara-Roboter
从控制系统上讲,这种运动虽然在控制上需要花费更多心思,但是在比较执行器从同一起始点到同一目标点所需的时间时,SCARA式码垛机器人比线性运动起重机式码垛机器人需要更少的时间。所以SCARA式码垛机器人经常被用于执行快速抓取码垛任务,常用于食品、制药工程[1]。
1.2.2 立体式机械臂码垛机器人
立体式机械臂工业机器人的构造灵活,常用于如涂胶、点焊、弧焊、喷涂、搬运、测量等各种任务,而码垛也是其能够胜任的一项重要任务。立体式机械臂码垛机器人拥有极高的动作灵活性,其构造很大程度地拟合了人体手臂的构造能力,从仿生学来看更贴近于人体手臂的形态,并且由于引入较多的转动轴(如六轴),所以立体式机械臂码垛机器人相对于其他几类机器人有很高的活动自由度。在满足目标点在机械臂工作空间里的前提条件下,其夹具(执行机构)理论上可以通过调控关节转动量到达空间中的任何一点。如图4中用于装卸饮料的KUKA公司机械臂。

图4 用于装卸饮料的KUKA公司机械臂
以目标点为一个立方体(图5)为例[2],线性运动起重机式码垛机器人、SCARA码垛机器人以及并联杆式机器人的夹具(执行机构)由于结构原因,只能触及立方体的一到两个平面(一对平行面)。而立体式机械臂码垛机器人可以通过高灵活性触及立方体的任意一面,且不论立方体绕A1、A2或A3如何转动。这种灵活性拓展了立体式机械臂码垛机器人的适用范围,如图6所示的立体式机械臂码垛机器人在物体入库时将物体从竖直平面抓取并放置到水平平面上。
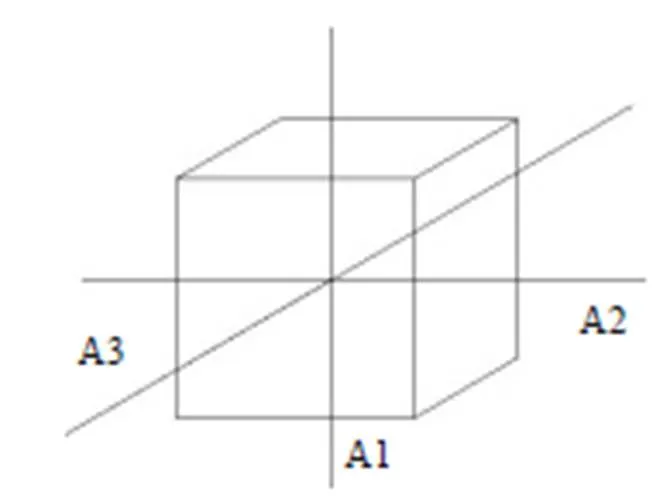
图5 目标点立方体

图6 立体式机械臂码垛机器人[4]
相对其余三种提及的机器人,立体式机械臂码垛机器人由于运动的非线性、复杂性,所需控制系统也更加复杂,在完成从相同起始点到相同目标点的转移时,将使用更多的时间[5]。
1.3 并联杆式机器人
并联杆式机器人又被形象地称为“蜘蛛手”。它在结构上拥有一个显著区分于其他几类码垛机器人的特点,即夹具通过几个并联的承重杆与关节连接,每一个承重杆都由一个独立电机驱动,通过各电机之间协作控制夹具运动。并联杆式机器人的结构[6]与夹具(执行机构)工作空间[2]如图7所示。
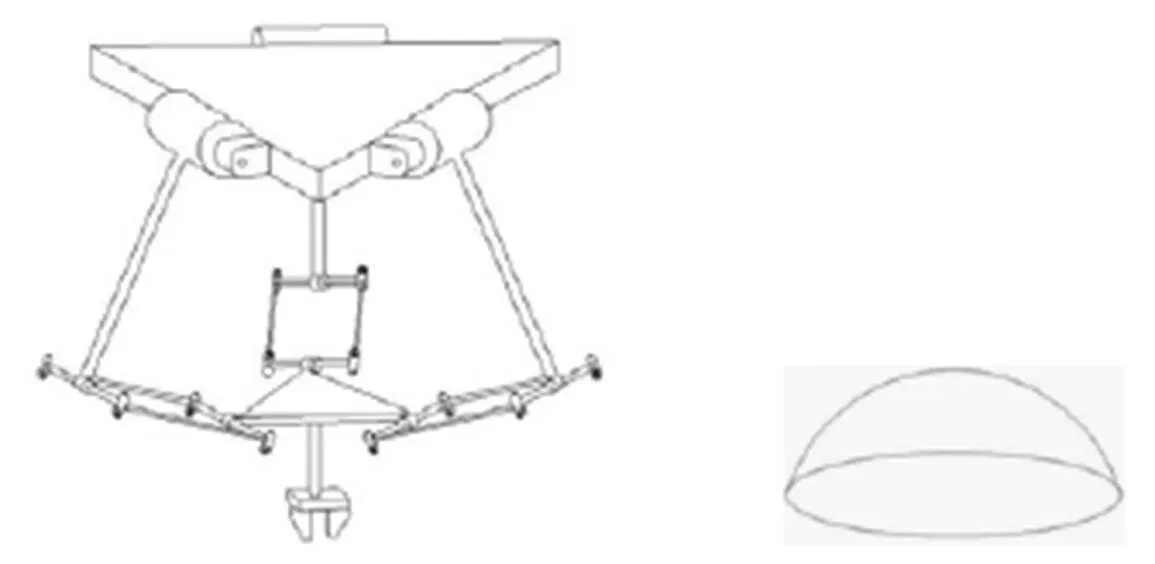
图7 并联杆式机器人的结构及夹具活动范围
结构特点决定并联杆式码垛机器人也只能实现两个平行平面直接物体的转移,并且各个连杆在电机驱动下做出的是非线性动作,所以控制难度相较于线性运动起重机式码垛机器人要更为复杂一些。由于该类机器人一般采用较细连杆与配套功率的驱动电机,其夹具(执行机构)只负责夹取或吸附一些小质量物体,并在电机驱动下做快速机动。图8展示了并联杆式机器人的码垛能力,整个过程用时不超过10秒,且下方平台处于旋转状态中。

图8 并联杆式机器人码垛能力展示[7]
由于并联杆式机器人具有运动精准度高、运动迅速、可承载负荷小的特点,经常用于食品生产行业夹取重量小的物体,如图9所示。

图9 并联杆式机器人在食品流水线快速叠放食品[8]
2 码垛机器人的智能化
老一代的码垛机器人机动多以固定、简单的编程为主,工件通过流水线传送带或叉车被运输到指定的固定地点,等待被码垛机器人夹取。由于物体起始地点、物体自身大小与重量和物体运动目标地点相对固定,其运动控制多采用编程技术,机器人运动轨迹单一,具有操作简单、动作效率高的优点。但同时,编程式码垛机器人的工作方式极不灵活,在面对物体物质改变或物体大小与重量改变时,不能及时调整自己的动作,只能进行简单重复的机械工作。由此引发的问题是,这类码垛机器不具备挑选能力和动态问题处理能力,不能广泛用在推行“智能制造”的企业里。
当代市场的动态性很大,订单规模小、产品种类多、客户订制化程度高,这对于企业内部物流是一个相当大的挑战。新一代的码垛机器人的操作强调智能化,以此来适应由动态的市场需求、客户需求决定的动态的生产需要。主要通过RFID(电子标签)、机器视觉以及人机交互路径学习等先进技术来实现码垛机器人控制的智能化,让其能具有动态问题解决能力。
2.1 RFID(电子标签)
RFID(Radio Frequency Identification),即射频识别,俗称电子标签,如图10所示。

图10 RFID射频识别标签[9]
RFID是一种非接触式自动识别技术,通过射频信号自动识别目标对象并获取相关数据,无须人工干预,可工作于各种恶劣环境。RFID技术可识别高速运动物体,并可同时识别多个标签,操作快捷方便。
RFID技术工作原理简单、制造成本低,对流水线改造要求不高,对码垛机器人结构不需要大的改变就可赋予其灵活的活动能力,可与上文中除并联杆式机器人以外的其他码垛机器人控制系统进行整合,使其具有动态问题处理能力。目前广泛应用于自动化生产和物流。一般RFID放置于被夹取物体的本身表面或所在容器内,物体在传送带上运动通过扫描器,其RFID信息随即被控制系统读取,系统处理信息后随机产生相应指令,控制码垛机器人做出相应机动,如将物体从传送带上夹取走、或者让其继续跟随传送带前进、亦或在传送带尽头转移至另外传送带或不同仓库里,如图11所示。

图11 码垛机器人将物体进行分类转移[10]
2.2 机器视觉
RFID技术并不能适用于所有行业,因为RFID标签本身是一个物理存在的物体,需要被安置于物体上。在食品生产、制药等行业,出于卫生考虑或物体本身特性考虑、不能将RFID放置在物体上,或者因为物体本身产量太大、没有足够的RFID射频频段来区分每一个物体,再或者没有必要或可能去区别每一个物体。这种情况下就特别适宜采用机器视觉技术,通过光学摄像机或LIDAR激光雷达,来识别物体环境,并将物体从环境中截取出来,提取位置信息,然后将信息发回控制系统,通过控制系统处理,控制码垛机器人去夹取物体[3]。
在食品行业中,经常将并联杆式机器人与机器视觉整合,机器视觉配合并联杆式机器人的高速运动,可以高效地将传送带上的散装食品分类、夹取。如图12所示。可以看出,在这种高动态环境中,借助机器视觉技术,并联杆式蜘蛛手机器人可以高效地分辨物体并进行夹取及分类。
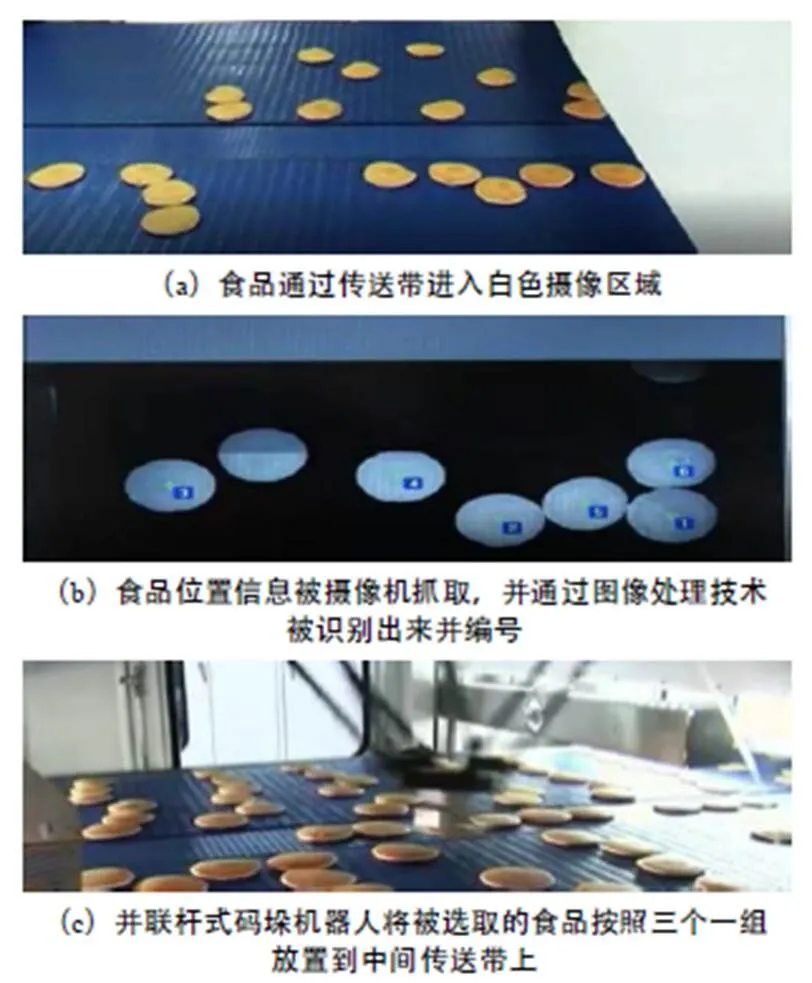
图12 并联杆式机器人与机器视觉整合用于食品行业[11]
2.3 人机交互路径学习
新一代机械臂式码垛机器人具备了一定的学习能力,通过人机交互活动,能够记忆学习新的路径,相比之前的机器人更能适应现代动态生产环境。如图13所示,机械臂在人的辅助下,在学习模式中记录自己的运行轨迹和各驱动装置的运行参数,用更直观的方式来学习新的路径,而不再通过专业人员编程。在这种学习模式的帮助下,机械臂式码垛机器人可以快速适应各种新的码垛任务,更改自己的运动路径,更适应动态生产环境[4,12]。
3 小结
码垛机器人的发展现已比较成熟,各类型机器人结合自身特点可以被应用在各行各业。尤其机械结构确立的动态性能可以说非常全面地覆盖了各类码垛任务,因此完全可以代替人工进行作业,提高生产效率、节约生产成本。配合RFID(电子标签)、机器视觉以及人机交互路径学习等智能化措施,各类码垛机器人也具有了很强的适应性和动态问题的处理能力,加之控制系统的稳定性,其犯错概率也是小于人类的,所以很好地提升了生产质量。

图13 Roberta公司微型机械臂通过人机交互学习新路径[13]
接下来的研究重心在于:研发更先进、更精确的控制技术,提高码垛机器人的工作效率和精确度;并在机器视觉的帮助下,提高码垛机器人的智能性,改善其工作灵活度,提升工作内容复杂度。
[1]Rüdiger Dillmann,Sven R. Schmidt-Rohr,Rainer Jäkel. 卡尔斯鲁厄工业大学机器人1课程讲义,第一章《导论》[R/OL].
[2]Rüdiger Dillmann,Sven R. Schmidt-Rohr,Rainer Jäkel. 卡尔斯鲁厄工业大学机器人1课程讲义,第二章《子系统》[R/OL].
[3]Rüdiger Dillmann,Sven R. Schmidt-Rohr,Rainer Jäkel. 卡尔斯鲁厄工业大学机器人1课程讲义,第十章《环境建模》[R/OL].
[4]立体式机械臂码垛机器人[R/OL]. http://www.chinanews.com/ cj/2017/08-05/8296352.shtml
[5]Rüdiger Dillmann,Sven R. Schmidt-Rohr,Rainer Jäke. 卡尔斯鲁厄工业大学机器人1课程讲义,第十一章《轨道规划》[R/OL].
[6]关于机器人和自动化ICRA的活动(第三册)[C]. IEEE Xplore会议,2003:116-4121.
[7]并联杆式机器人码垛能力展示[R/OL]. https://www.youtube. com/watch?v=Gv5B63HeF1E&t=53s
[8]并联杆式机器人在食品流水线快速叠放食品[R/OL]. https:// www.youtube.com/watch?v=v9oeOYMRvuQ
[9]RFID射频识别标签[R/OL]. http://www.chnaltag.com/ xingyexinwen/66-59.html
[10]码垛机器人将物体进行分类转移[R/OL]. https://www. bastiansolutions. om/case-studies/automotive
[11]并联杆式机器人与机器视觉整合用于食品行业[R/OL]. https:// www.youtube.com/watch?v=v9oeOYMRvuQ
[12]Rüdiger Dillmann,Sven R. Schmidt-Rohr,Rainer Jäkel. 卡尔斯鲁厄工业大学机器人1课程讲义,第十二章《交互式编程》[R/OL].
[13]Roberta公司微型机械臂通过人机交互学习新路径[R/OL]. https://www.youtube.com/watch?v=bHa4tR8zCLY
The Classification and Application of Palletizing Robot
LI Xianwei
( Sichuan Provincial Machinery Research & Design Institute,Chengdu 610063, China )
It is advantaged to replace the human labor force with industrial robots. The intelligentialized industrial robots are the needs of this age for the adaption, that the word is stepping into the age of industry 4.0. As one of the application fields of the intelligentialized industrial robots, the palletizing robots is crucial for the increasement of production efficiency in the automated production. In this article are the structures, features and applications of Linear palletizing robots, Palletizing robotarms and Parallel palletizing robots discussed. This artical also provides the analysis of the three major means of the realization of the Intellectualization for the palletizing robots, which are RFID(radio-frequency identification, Machine Vision and Path learning through Human-Machine Interactions. The intelligentialized industrial robots are equipped with high level Adaptability and the abilities to solve the dynamic problems. With Chinese Industry heading towards the Industy 4.0 and working on the achievement of “Made in China 2025, the intelligentialized industrial robots should be extensively applied in many fields of automated production and intelligent production.
industrial robots;palletizing robot;intellectualization;industry 4.0;Made in China 2025
U653.928.+5
A
10.3969/j.issn.1006-0316.2018.03.008
1006-0316 (2018) 03-0029-06
2017-9-25
黎显伟(1965-),男,重庆人,本科,高级工程师,主要从事机械工程研究及应用、智能制造研究及应用工作。
猜你喜欢
装备制造技术(2021年1期)2021-05-21 07:54:52
哈尔滨轴承(2021年4期)2021-03-08 01:00:48
装备制造技术(2020年9期)2021-01-26 00:15:30
装备制造技术(2020年3期)2020-12-25 05:22:06
重型机械(2020年3期)2020-08-24 08:31:48
装备制造技术(2019年12期)2019-12-25 03:05:50
电子制作(2019年20期)2019-12-04 03:51:36
专用汽车(2018年10期)2018-11-02 05:32:32
制造技术与机床(2017年10期)2017-11-28 05:20:46
专用汽车(2016年4期)2016-03-01 04:14:29