一种智能云种植机器人的设计与实现
2018-04-13 05:45徐景磊宋欣通信作者李冰王鸿奎刘超帅陈宇扬
天津农学院学报 2018年1期
徐景磊,宋欣,通信作者,李冰,王鸿奎,刘超帅,陈宇扬
一种智能云种植机器人的设计与实现
徐景磊1,宋欣1,通信作者,李冰2,王鸿奎3,刘超帅1,陈宇扬1
(1. 天津农学院 工程技术学院,天津 300384;2. 天津德发科技有限公司,天津 300384;3. 天津市北辰区农机发展服务中心,天津 300400)
以打造家庭式全自动小型农场为理念,设计开发一款集自动播种、浇水、施肥、环境监测和控制等功能于一体的智能云种植机器人。基于笛卡尔坐标系统的硬件设计且融合DIY理念,具有良好的空间延伸性且易于组装。播种机构可以适应多粒度种子的精密播撒,具有较为广泛的使用范围。融入云物联技术开发了云种植管理平台,用户可以通过电脑、手机APP实现对种植环境温湿度、光照、CO2浓度等现场情况的实时监测、补光、通风等环境控制、视频监控,以及对植物生长数据的记录、分析和管理等功能;还可以通过专家库指导种植过程,为植物选取最佳的养护方案。该机器人适用于家庭种植、科普实践及种植实验,具有良好的实用性和市场推广价值。
智能化;种植机器人;笛卡尔坐标系统;云种植管理平台
随着人们生活品质的日益提高,越来越多的人选择在自家的阳台、庭院中种植花草或瓜果蔬菜,但是由于平时工作繁忙或者经常出差,常常疏于对植物的照顾。因此,国内外便出现了像智能花盆、智能养花助手这样的种植利器[1]。例如瑞士的Koubachi WiFi Plant Sensor(图1),外形与高尔夫球杆的球头相似,只要将“杆身”插入花盆的土中,传感器就能自动检测和监控土壤中的空气、湿度、养分等指标,然后通过WiFi信号将数据传输到使用者的手机上。法国的Parrot Flower Power(图2),该设备装有4个传感器,可以根据土壤电导率、植物暴晒时间、土壤温度、土壤中的介电常数等指标分别对土壤肥力水平、光照条件、环境温度、土壤湿度进行监测,并能每隔15 min向移动设备APP传送一次数据。配套APP会基于一个包含6 000多种植物生长数据的数据库对实时数据进行自动分析,能为植物选取最佳的养护方案,并提醒以及告知用户该如何照料植物,是否需要施肥或者浇水等。美国的Smart Herb Garden(图3)每天会自动将适量的水导入泥土中,并利用顶部的LED灯为植物提供适当的光照,保证植物茁壮成长。此外,该设备还使用了含有纳米技术的载体土壤,能够使氧气、水分、养分更加均衡地供给植物。除了底盘上的塑料浮标可以显示出水箱水量外,在水量不足时,智能灯座会不断闪烁来提醒加水。在国内也出现了类似的智能养花装置,如花卉培养器和用于提供营养液的浇灌器,它们内含智能控制系统,能实现对所养植物的远程浇灌,在增加生活乐趣的同时,为人们的种植活动提供方便,解除种植烦恼,提高植物的成活率。

图1 Koubachi WiFi Plant Sensor

图2 Parrot Flower Power

图3 Smart Herb Garden
目前,所报道的种植利器仅仅是环境监测或者充当种植专家的角色,无法实现自动播种、种植等功能[2-3],并且大多只适用于单盆植物的栽培,如果家中有多盆植物,就需要购置多台设备,大大提高了种植成本。因此,本文提出一种智能云种植机器人,从外形和功能上能接近于一种面向家庭使用的微型种植大棚,集自动播种、浇水和施肥于一体,并将物联网和云计算技术相结合,建立云种植管理系统,用户可以利用手机APP或者电脑实现对种植环境参数的监测、设备远程控制、生长数据记录、分析和管理等功能,从而实现科学的精细化种植,提高种植的成活率和质量,减轻使用者的劳动强度。该种植机器人不仅适用于家庭种植,还可以用于校园或家庭的科普实践以及种植实验。
1 种植机器人机械本体方案设计
种植机器人的机械本体基本框架如图4所示,它是一个基于笛卡尔坐标系统建立的三轴导轨结构,主要包括底座、立柱、横梁和移动滑轨,均采用同步带式直线导轨滑台结构。两个立柱通过底座上左右两边的滑台实现方向的直线运动;横梁在两个立柱上的高低位置可调,调好后通过螺栓固定;移动滑轨通过十字滑块与横梁相连接,可以实现和轴方向的直线运动,3个方向的运动可以确保种植机构能够达到种植区域的每个位置进行作业。种植面积由底座导轨和横梁的结构尺寸决定,直线导轨为标准件,拥有多种规格和型号,可以根据实际种植空间大小自行定制结构尺寸,具有良好的空间延伸性。滑台和导轨间通过螺栓固定,易于组装和拆卸,充分体现了DIY理念。
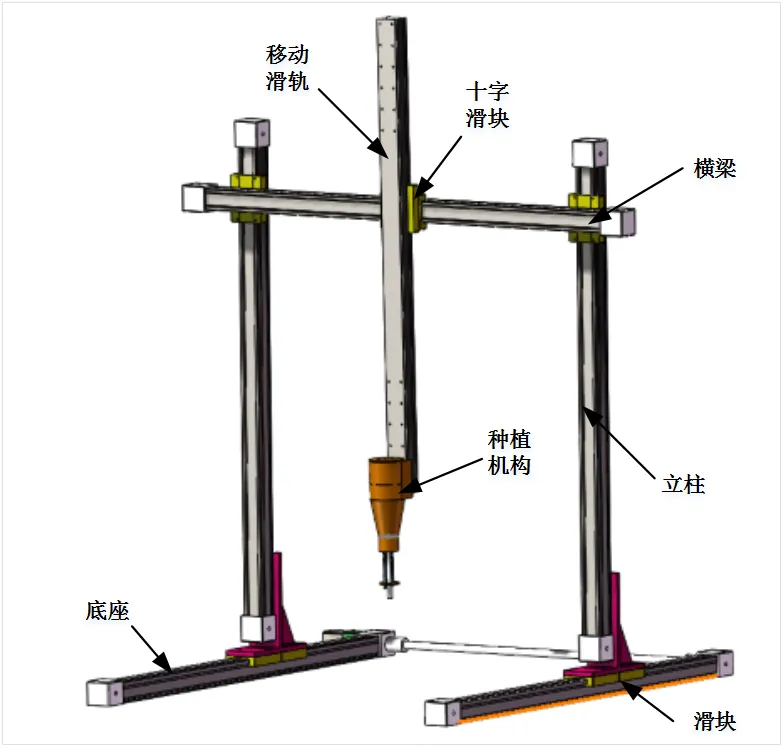
图4 种植机器人基本框架
种植机构安装在移动滑轨的末端,如图5所示,其结构主要包括吸种装置、种仓和播种装置构成。吸种装置包括电机、叶轮、隔离网、吸种管、后盖和吸种外壳,其工作原理类似吸尘器,电动机高速驱动叶轮旋转,叶轮的叶片不断对空气做功,使叶轮中的空气得到能量,并以极高的速度通过后盖的孔排出。同时,吸种管位置的空气不断地补充叶轮中的空气,致使吸种装置内形成瞬时真空,因此能够使种子在负压作用下通过吸种管吸入种仓。为了防止吸入的种子打到高速运转的叶轮,在叶轮的下方放置了隔离网。吸种管底部可以外接胶管以便插入种子袋中进行吸种。播种装置由播种外壳、播种管、外接触片、顶杆、弹簧、推杆和内接触片组成。其工作原理为:在种植机构下降过程中,播种管先插入到土壤中,进而外接触片会接触到土壤表面。随着继续下降,外接触片会推动顶杆克服弹簧力带动推杆向上运动,进而将内接触片顶开到一定的高度。此时,由于种仓是倒锥体,内接触片向上顶开后会与种仓内壁产生一定量的环形空隙,种仓内的种子便可以通过这一环形空隙落入到播种外壳中。内接触片的上表面设计成椎体,可以有利于覆盖其表面的种子滑落到周围的空隙中。播种外壳的内部同样设计成倒锥形式,其底部有圆孔与播种管相连接,当种子从种仓滑落其中后,同样可以沿着倾斜的内壁进入到播种管中实现播种作业。完成播种后,种植机构上升,当外接触片脱离土壤表面时,依靠弹簧力使得内接触片复位,这样就实现了种仓与播种外壳的隔离。整个过程是先关闭种仓然后播种管再完全脱离土壤,可以有效避免种子的泄漏。
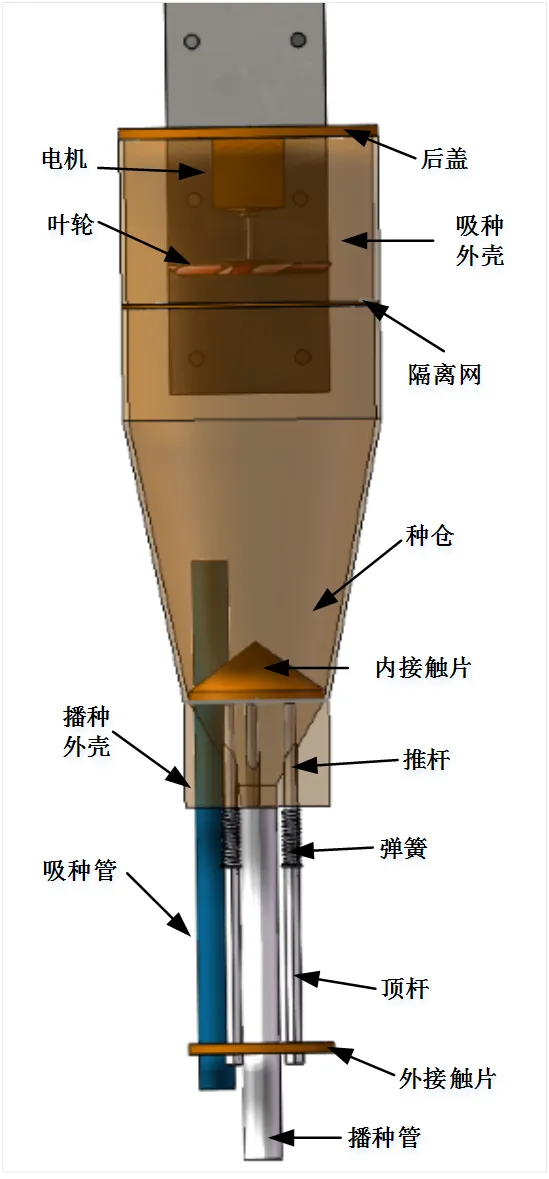
图5 种植结构
2 种植机器人控制系统设计
种植机器人的控制核心选用Arduino Mega 2560微处理器。如图6所示,微处理器上搭载有步进电机驱动板,用于驱动轴3个方向上步进电机的运动;电机驱动板用于驱动吸种电机运转;图像采集装置和相应的图像传输通讯模块,用于采集种植现场的视频画面并回传至云平台,实现对种植现场的实时监控;USR-GM3嵌入式无线透传模块,通过HTTPD Client模式将数据直接传向HTTP服务器端,并交由Web服务器Tomcat打包处理,再由页面脚本程序转发至云服务器存储;光照度、环境温湿度、土壤湿度和CO2模块,可以实时监测植物生长的环境参数。当环境参数不符合预先设定要求时,能够自动控制LED光照、通风、浇灌等系统的开启[4]。控制系统程序流程如图7所示。
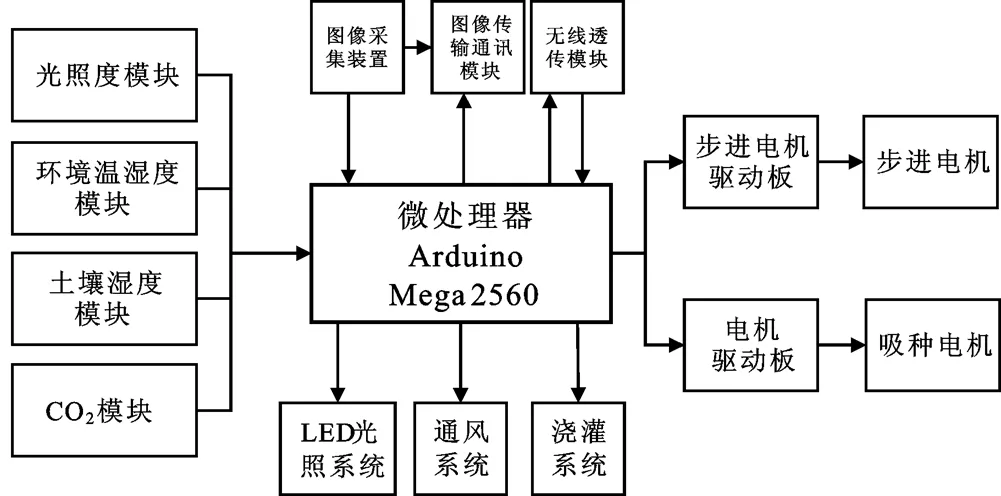
图6 控制系统组成
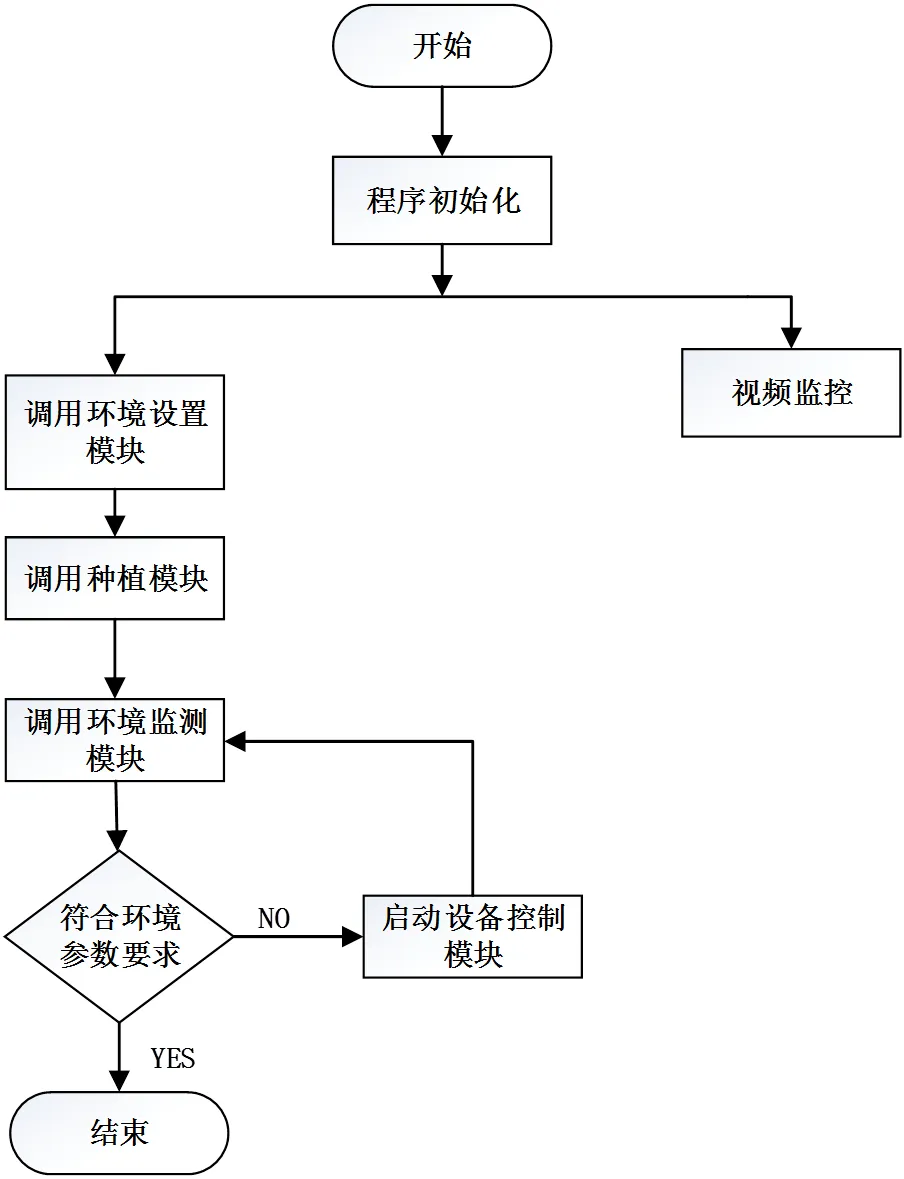
图7 程序流程图
3 云种植管理平台
云种植管理平台[5]采用当前Java Web开发最流行的框架spring+hibernate+struts为基础搭建平台技术框架。Web框架内的程序在运转中,逻辑流可分为接口层、业务逻辑层和访问层。接口层拟定了远程情形的某一请求,提供技术说明;依照给定的请求,调用某一函数;业务逻辑层构建了必备的规程,例如数据的转发、下发控制命令和设置参数等操作;访问层衔接了传递过来的多样化信息,在不同页面之间共享。种植环境参数检测、设备远程控制、种植分析、生长过程回放和种植专家库等主要模块均采用图形化界面,MySQL作为数据库管理软件,数据库完全按照标准化建设,所有的数据命名都是以模块的缩写和表的英文组成,这样能够统一数据库表的命名;采用面向对象的设计方法,先进行对象实体的设计,然后将对象持久化到数据库中,采用Visio设计工具将所有表与表之间关联,这样将整个系统的设计和数据库的设计有机结合起来。通过这一智能化云平台,用户可以实时监控植物生长情况,远程操纵LED光照、通风、浇水和施肥系统,记录植物生长数据,统计分析种植环境参数等,并且提供种植知识库作为专家库指导种植环境参数的设置和方案调整的依据,从而实现科学的精细化种植,提高种植的成活率和质量,减轻使用者的劳动强度。图8~图11为云种植平台的部分界面。

图8 云种植平台主页

图9 云种植平台数据采集及分析
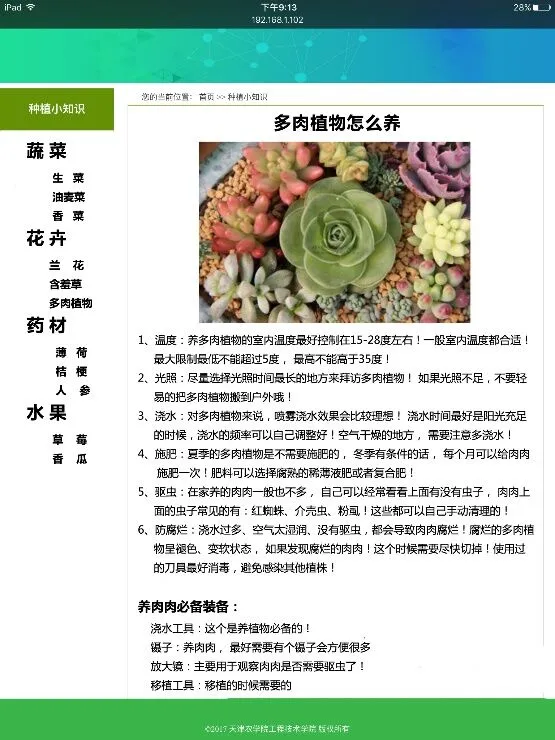
图10 云种植平台专家库

图11 云种植平台控制界面
4 种植机器人的实现及功能测试
根据上述设计方案,分别搭建了阳台式和桌面式两款种植机器人。阳台式种植机器人样机如图12所示,由于样机整体尺寸不是很大,适用于阳台一角,而不是用于露台的种植,如果做成图4所示的龙门结构,空间感觉会比较局促,因此去掉了立柱,将种植机构即轴安装在了横梁上,从而使得整体结构尺寸更为轻巧,这也从一个侧面体现了种植机器人本体结构具有较大的灵活性,可以根据实际种植空间选择适合的本体结构。除此之外,将传感器以及摄像头都集成在了一个小型气象站中,气象站控制系统与种植机器人控制系统通过蓝牙通信,进行数据和指令的传输。图13为桌面式种植机器人的样机,与阳台式所不同的是,该种形式的种植机器人将传感器以及摄像头都集成在了箱体当中,在后续的完善过程中,会将该箱体外表面进行封装,正面设置可开合的门,使其形成一个封闭的种植温室环境。
两种型号种植机器人的主要参数如表1所示,分别以万寿菊和香菜种子为播种对象,对吸种、播种、浇水、补光、视频监控、数据上传服务器和移动端远程控制等完整系统进行了联调测试。经检测,各项数据均能够正常采集,并实时上传至服务器,补光、温控、通风和浇灌等设备均已实现自动控制,移动终端实现远程监控。图9所示即为数据透传模块与服务器数据收发测试记录,图中3条曲线分别对应环境参数中的温度、湿度和光照度。

图12 阳台式种植机器人样机
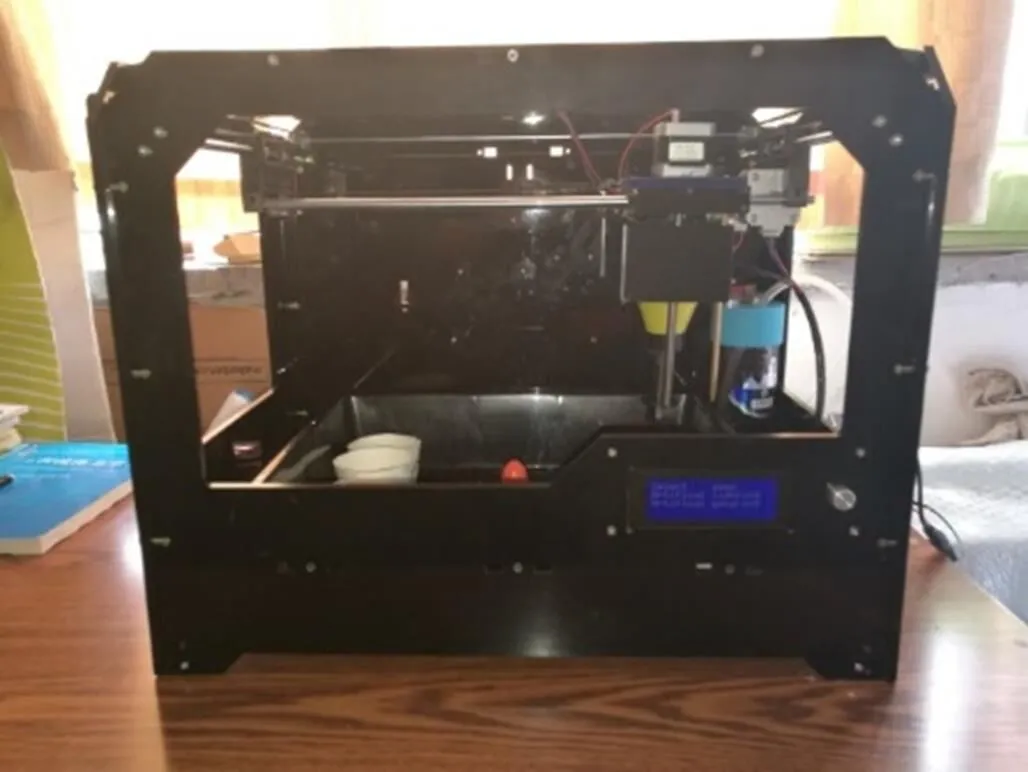
图13 桌面式种植机器人样机

表1 种植机器人主要参数列表
5 结论
通过机械本体以及控制系统设计,分别实现了阳台式和桌面式两种智能云种植机器人的样机制作,并将物联网和云计算技术相结合实现了云种植平台的开发。在实验室条件下,对该机器人和云种植平台这一完整系统进行了联调测试,较好地实现了预期功能。该机器人基于笛卡尔坐标系统的硬件设计,充分融合了DIY设计理念,具有良好的空间延伸性且易于组装。播种机构可以适应多粒度种子的精密播撒,具有较为广泛的使用范围。融入云物联技术可以提高家庭种植的科学性和趣味性。该款机器人的设计适用于家庭种植,科普实践及种植实验,具有良好的实用性和市场推广价值。
[1] 卓荦. 智能养花利器[J]. 浙江林业,2015(1):38-39.
[2] 杨咏倩. 基于物联网技术的智能种植监测系统[D]. 青岛:中国海洋大学,2015.
[3] 王晓冰,廉小亲,郝宝智,等. 基于物联网的智能种植监测系统[J]. 测控技术,2017,36(8):102-106.
[4] 艾海波,魏晋宏,邱权,等. 微型植物工厂智能控制系统[J]. 农业机械学报,2013,44(S2):198-204.
[5] 王建平,王良帆. 基于iOS平台的温室大棚物联网云管理系统的研制[J]. 中国农机化学报,2017,38(3):66-72.
责任编辑:杨霞
Design and realization of an intelligent cloud planting robot
XU Jing-lei1, SONG Xin1,Corresponding Author, LI Bing2,WANG Hong-kui3, LIU Chao-shuai1, CHEN Yu-yang1
(1. College of Engineering and Technology, Tianjin Agricultural University, Tianjin 300384,China; 2. Tianjin Defa Technology Co. LTD, Tianjin 300384,China; 3. Tianjin Beichen Agricultural Machinery Development Cervice Center, Tianjin 300400,China)
The intelligent cloud planting robot was designed and developed for the concept of family automatic small farm, with the function of automatic sowing, watering, fertilization, environmental monitoring and control integrated. Based on the Cartesian coordinate system hardware design and the DIY concept, the good space extensibility and easy assembly performance was realized. With a wide application range, the multi-granularity seed precision sowing was realized for the sowing mechanism. By the internet technologies based on the cloud service, the cloud planting management platform was developed. The function of the real-time monitoring for planting environment parameters such as environmental temperature and humidity, light, CO2concentration etc, the environmental control for the supplemental lighting and ventilation etc, the video surveillance for the field situation, the record, analysis and management for the plant growth data, all were realized by the computer and the mobile phone APP. Besides, the planting process was guided and the optimal maintenance plan was selected by the expert database in the platform. The robot is suitable for family planting, practice in popular science and planting experiment, with good practicability and market value.
intelligent; planting robot; Cartesian coordinate system; cloud planting management platform
TP242.3
A
1008-5394(2018)01-0081-05
10.19640/j.cnki.jtau.2018.01.018
2017-10-31
国家自然基金项目(51305299);国家级大学生创新创业训练计划项目(1506014219)
徐景磊(1997-),男,本科在读,农业机械化及其自动化专业。E-mail:2287841961@qq.com。
宋欣(1979-),女,副教授,博士,主要从事智能农机装备方面的研究。E-mail:songxin-tju@163.com。
猜你喜欢
航天返回与遥感(2020年6期)2021-01-13
黑龙江工业学院学报(综合版)(2020年5期)2020-07-29
自动化学报(2019年12期)2020-01-19
电子制作(2019年7期)2019-04-25
红领巾·萌芽(2017年5期)2017-06-23
爆笑show(2016年7期)2017-02-09
少儿科学周刊·儿童版(2015年10期)2015-11-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07