月球背面探测任务多目标协同控制模式设计
2018-04-12 01:02彭德云邹雪梅李亮
深空探测学报 2018年6期
彭德云,邹雪梅,李亮
(北京航天飞行控制中心,北京 100094)
引 言
为解决在月球背面实施科学探测任务时,月球表面探测器与地球无法通信的问题,需要在月球轨道附近部署中继卫星,以提供地面测控网与月面探测器之间的中继通信支持[1]。围绕地月L2点的Halo轨道是适合部署中继卫星的理想地点[1-2]。实施“嫦娥4号”月球背面探测任务的航天器包括中继卫星(简称中继星)、着陆器、月面巡视器和环月探测卫星[1,3-6]。中继星和着陆器/巡视器组合体(简称着巡组合体)分2次发射。2018年5月21日,西昌卫星发射中心用“长征4号”丙运载火箭,成功将探月工程“嫦娥4号”任务的“鹊桥”中继星发射升空,并于2018年12月8日,在西昌卫星发射中心用“长征3号”乙运载火箭成功发射“嫦娥4号”探测器。
着巡组合体在月球背面着陆后,通过中继星向地球发送遥测数传数据、接收测控网发送的着巡控制指令。中继星与着巡之间、着陆器和巡视器之间协同控制多,整个飞行过程切换状态比较复杂。测控中心需要在月面定点着陆[7]的轨道约束、器地与器星通信时间窗口约束、中继天线跟踪指向约束、月面光照与热控约束等多重组合约束条件下,完成月球背面动力下降过程、巡视器驶离着陆器和月面巡视探测遥操作等一系列过程控制。在地面测控资源有限的前提下,完成月球背面探测任务多个航天器,以及以往探月工程在轨航天器的联合控制和测控网资源分配。
本文从月球背面探测任务需求出发,设计了多目标协同飞行控制模式,重点解决了测控计划与上行发令的协同控制和测控资源调度问题,并将其成功应用于“鹊桥”中继星和“嫦娥4号”探测器的测控任务。
1 月球背面探测任务测控资源组成
1.1 探测器基本组成和飞行过程
月球背面探测任务由月球中继星、着陆器、月面巡视器和环月探测卫星等多个航天器联合开展科学探测工作。中继星经过发射段、地月转移段、月球到L2转移段、L2点捕获段和使命轨道段5个飞行阶段,最终在围绕地月L2点的Halo轨道上运行;环月探测卫星经过地月转移段、近月制动段,最终运行在环月轨道上。
着陆器携带月面巡视器经过上升段、地月转移段、环月段和动力下降段4个飞行阶段,最终在月球表面实现软着陆,月面巡视器驶离着陆器,两器并行开展月面探测活动。中继星的飞行过程如图1所示,着陆器和月面巡视器飞行及月面工作过程如图2所示。

图1 月球中继星飞行过程示意图Fig.1 Flight trajectories of relay satellite

图2 着陆器和月面巡视器飞行及月面工作过程示意图Fig.2 Flight trajectories and lunar surface workflow of lunar lander and rover combination
在上述过程中,环月轨道和月球正面同时还需要测控的目标包括:2013年发射的“嫦娥3号”着陆器、2014年发射的再入返回飞行任务服务舱、2018年随同中继星发射的“龙江”卫星。在深空测控资源有限的情况下,多个测控目标飞行控制和测控资源分配需采用多目标协同控制模式统一安排。
中继星测控设备包括:对地测控数传设备和中继通信设备;着陆器和巡视器的测控数传设备包括对地测控、中继通信设备和月面器间通信设备;环月卫星测控数传模块包括对地测控和数传设备。着陆巡视组合体在奔月过程中,采用对地测控设备直接与地面测控网进行通信。月球背面科学探测阶段,着陆器和巡视器无法直接与地面测站进行通信,需与运行在地月L2点Halo轨道上的中继星进行中继通信,通过中继星进行控制和科学数据回传。
月球背面探测任务的测控计划的控制目标包括:着陆器、月面巡视器、中继星和环月卫星。与“嫦娥3号”任务等以往月球正面的科学探测控制任务[8]相比,“嫦娥4号”月球背面探测任务控制目标多、飞行阶段多,并增加了器星间代传上行指令和遥测数传数据的协同控制要求,需要解决多目标天地协同控制中协同控制关系描述、多目标测控资源分配、协同飞行控制计划和上行控制的联合设计等相关问题。
1.2 测控网组成
月球背面探测任务采用UXB(Unified X-band System)+干涉测量+USB(Unified S-band)的测控体制,即利用我国现有的X频段深空站测控设备和S频段航天测控网,并辅以干涉测量设备,完成对中继星、着陆器、月面巡视器和环月卫星的联合测控任务[9]。
地面测控设备与探测器和环月卫星上测控数传设备相互配合,共同完成探测器和环月卫星各飞行段的测控、遥测和遥控及数据接收等任务。地面测控和数据接收设备与各航天器之间的测控关系如图3所示。

图3 月球背面探测任务测控关系Fig.3 Tracking and telecommunication relationship between lunar farside exploring probes
测控过程中,地面测控站对中继星进行上下行测控和数传接收任务;着陆器着陆前,地面测控网对着巡组合体进行上下行测控;着陆器着陆后,测控系统通过中继前向和返向链路对着陆器、巡视器进行控制;地面测控网采用对地测控数传链路对环月卫星进行上下行测控和数传数据接收。
2 协同控制中的关联目标描述方法
月球背面探测过程中,着陆器和巡视器需要通过中继星进行代传控制,着陆器和巡视器之间存在代传和数传链路,中继星需要在提供中继通信服务时配合完成相关设备状态设定。着巡组合体环月飞行过程,则存在地面测控和中继通信两类控制链路,分别依据地面测控时间窗口和中继可视窗口确定各自可用时段。上述过程的工程实施需要解决多目标协同控制事件描述以及对应多目标控制指令生成之间的映射问题。其核心是需要依据各个飞行控制事件需求,实现目标航天器的控制及其代传上下行数据航天器之间关联控制。为支持多个目标之间的协同配合关系描述,本文提出了区分控制目标和上行路由的协同控制关联目标描述方法。
2.1 控制目标
控制目标是指遥控指令和注入数据最终到达的目标航天器。根据月球背面探测任务的数据上下行和通道特点,月球背面探测任务的测控计划的控制目标包括着陆器、月面巡视器、中继星、环月卫星。
2.2 上行路由
1)上行路由概念
在不同的组合体模式、单器工作和中继通信模式下,指令需要经由特定航天器(中继星、着陆器等)的上行信道发送,所经由的航天器称为上行路由。
月球背面探测任务的上行路由分别为着陆器、中继星、环月卫星路由。着陆器采用地面站发令时,上行路由为着陆器自身,采用中继前向发令时,上行路由为中继星;月面巡视器由着陆器代传指令,处理为着陆器指令;月面巡视器通过中继前向发令时,上行路由为中继星。
2)上行路由确定原则
上行路由根据飞行器组合状态和飞行姿态确定。不同控制目标按各自飞行阶段控制需求确定其上行路由,再依据上行路由分配测站资源,具体如表1所示。
3)控制目标和上行路由的运用
飞行控制事件描述时,采用“控制目标”属性值明确事件发生的主体。该事件对应的指令代码、注入数据、遥测的数据生成和发送均通过“控制目标”属性实现与该目标基础数据集的自动关联。
飞行控制事件的“上行路由”属性明确航天器之间的上下行代传关系。该事件对应代传数据的协议转换、数据封包/解包处理通过“上行路由”属性实现与代传目标基础数据集的自动关联。
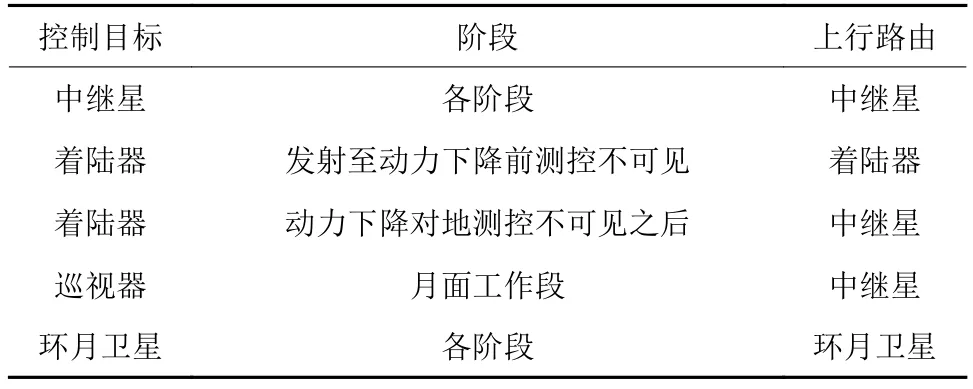
表1 各控制目标各阶段的上行路由Table 1 Uplink router object of each control object in different stages
飞行控制事件通过上行路由的测控网配置实现飞控事件与地面测控网的协同操作。上行路由的测控资源配置内容为不同时段的可选测站集合及测站操作需求。任务规划软件依据测控资源分配规则集和上述测控资源配置,实现对测控站资源的统一分配。
3 上行路由测控网资源配置原则
3.1 上行路由的测站选用原则
月球背面探测任务测控计划按测控资源配置和规则集,实施上行路由选取、测站选取和点频选取。实施流程按照“上行路由确定->测站集并选站->点频确定”3个步骤实施,具体如下:
1)根据各目标的不同任务阶段分别确定上行路由。
2)根据上行路由和测站分配关系确定上行测站,上行控制测站选取流程为:先确定测站集、再选测站。
3)根据上行路由和测站之间天线指向的角度关系确定上下行测控点频。
3.2 上行测站确定原则
月球背面探测任务中,单个测控目标同一时刻一般只能有一个测站对其加调一个点频的载波进行上行控制。当两个或两个以上的测站共视时,需要对实施上行控制的测站进行选取。上行控制测站选取原则为:先确定测站集、再选测站的两步原则,具体如下:
1)确定测站集,各上行路由目标的测站集根据上下行需求确定,根据不同阶段的上行路由目标数量、测站跟踪数据、测定轨精度需求,确定不同阶段各个上行路由目标的跟踪测站集合。
2)测站选用,按照测站优先级从高到低、先进先用、交叠切换的顺序选用,探月工程任务的深空测控网考虑同时支持多任务、重要控制过程可靠备份的原则,存在同一时段有多个测站同时具备跟踪能力的情形。为高效利用测控资源和月面工作时段,需要进行测控资源的接力跟踪处理。
根据前述上行控制测站的选用原则,确定前一上行控制站与后一上行控制站的交接班时刻Talt;交接班时刻Talt表示前一上行控制站完成关上行载波时刻,同时也为后一上行控制站开始开上行载波时刻。上行控制测站按照确定的交接班时刻,确定各自的有效遥控区间(即上行控制开始时刻至上行控制结束时刻)。
根据测站预报构造各个测站的单站有效控制弧段,假定:测站A弧段的进单站遥控时刻为TIC1,出单站遥控时刻为TOC1,捕获时长为△TCAP1,去捕时长为△TCLOSE1;测站B弧段的进单站遥控时刻为TIC2,出单站遥控时刻为TOC2,捕获时长为△TCAP2,去捕时长为△TCLOSE2。计算前站A去捕完成时刻T1=TOC1+△TCLOSE1,后站B捕获开始时刻T2=TIC2-△TCAP2。若满足下列关系,认为测站A和测站B有效遥控区间搭接:T1>T2,如图4所示,否则,认为测站A和测站B不搭接。

图4 有效控制弧段搭接判断准则Fig.4 Overlapping judgement criterion of valid uplink tracking arcs
对判定搭接的测站之间需上行控制权的交接处理。如图5所示,假定测站A、测站B的交接班时间Talt为Talt=T1,对两站的上行控制开始时刻、上行控制时刻处理如下:
1)测站A的进单站遥控时刻为TIC1、出单站遥控时刻为TOC1不变,其有效遥控区间仍为[TIC1,TOC1]。
2)测站B的出单站遥控时刻TOC2不变,修改对应测站B弧段的进单站遥控时刻为TIC2′=T1+△TCAP2。测站B对应弧段的有效遥控区间为[TIC2′,TOC2]。
3.3 测站上行点频和前向确定原则
3.3.1 测站上行点频确定原则
测控目标的上行路由和上行测站确定后,依据探测器天线对地指向判断选取的原则选取测站上行点频。假定月球探测器对称指向的两路测控天线分别对应测控f1和f2两个点频。如图6(a)所示,定义f1点频的对应天线轴与星站连线夹角为β角,则:
1)航天器的β≤90°时,采用f1点频;
2)航天器的β>90°时,采用f2点频。
3.3.2 中继星前向点频确定原则
着陆器、月面巡视器与地面通过中继链路进行通信时,依据探测器天线对中继星指向有利的原则确定前向点频。假定探测器对称指向的两路测控天线分别对应测控f1和f2两个点频。如图6(b)所示,定义探测器f1点频的对应天线轴与器星连线夹角为γ角,则:
1)航天器的γ≤90°时,采用f1点频前向通信;
2)航天器的γ>90°时,采用f2点频前向通信。

图5 搭接测站的控制权交接处理Fig.5 Uplink control transfer between overlapped stations

图6 β角与γ角示意图Fig.6 Flowchart of β angle and γ angle
4 月球中继测控资源分配方法
基于中继星前向链路在星上处理时段分配上的独占性,着陆器和月面巡视器须分时进行前向控制。考虑中继星测控上行通道的唯一性,正常情况下中继星、着陆器、月面巡视器均需通过中继星分时上行。需要对月球中继测控资源进行统一分配。本文设计了基于中继时间窗口的资源申请及分配方法。
1)基本概念定义
(1)中继可用窗口
中继星地面测控可见窗口扣除平台维护时段(中继星进出站设置等操作)的可用时段,形成“中继可用窗口”。使用中继可用窗口的各个用户的控制事件,其上行路由属性为中继星,对应“上行测站”为中继星的上行测站。
(2)中继使用需求
中继星、着陆器和巡视器各自工作时,占用中继通信的可用时段,各用户明确各自的中继使用需求,主要包括:事件工作内容、事件时长、事件开始时刻、事件优先级、时间敏感性等。中继使用需求的优先级事前按类型确定,必要时可调整。划分为高、中、低等多级优先级。
(3)中继使用窗口
中继窗口规划软件根据中继星跟踪弧段和中继星平台维护时段,计算中继星可用窗口;接收处理着陆器、中继星和月面巡视器工作中继使用需求,为其分配各自的“中继使用窗口”,中继星、着陆器、月面巡视器在分配给各自的中继使用窗口内工作。
2)中继使用窗口分配策略
(1)获得当前中继可用窗口及中继星、着陆器、月面巡视器使用需求。
(2)按优先级分配当前中继可用窗口。
(3)同优先级需求下,优先安排时间敏感事件和时间需求小的使用需求。
(4)按时间最大利用原则尽可能多地分配窗口直至可用窗口使用完毕或无法继续分配。
(5)分别输出已满足、未完全满足和未满足的使用需求,已满足和未完全满足的使用需求形成中继使用窗口。
(6)发布中继使用窗口、拒绝使用需求清单。
3)中继使用窗口的分配流程
结合月面工作段月夜和月昼的每月交替工作特点,月球背面探测任务的中继使用窗口按照一个自然月为一个分配周期。一个周期的分配划分为两个阶段实施。按月昼工作开始时刻为T结算,在此之前的分配流程如下:
(1)第1阶段:中继使用窗口预分配阶段(T-14天~T-7天):①T-14天,按当时轨道预报发布中继可用窗口;②T-12天,各用户提交中继使用需求;③T-11天,汇总使用需求,发布中继使用窗口预分配版;④T-7天前,各用户交互反馈分配调整意见。
(2)第2阶段:中继使用窗口正式分配阶段(T-7天~T-1天):①T-7天,按当前轨道预报更新发布中继可用窗口;②T-5天,各用户提交调整的中继使用需求;③T-3天,汇总使用需求,发布中继使用窗口建议版;④T-2天前,各用户交互反馈分配调整意见并微调;⑤T-1天,发布中继使用窗口正式版。
中继使用窗口文件发布后,作为后续各用户一个月昼内开展规划与上行控制的工作依据。
5 多目标协同控制规划模式
月球背面探测任务的多目标协同控制规划依据飞行/月面工作阶段的工作特性,分别采用标称计划工作模式和遥操作规划工作模式两种规划工作模式。
以着巡组合体落月时刻划分,落月前为着巡组合体按预定轨道运行的系列轨道控制及在轨试验,执行时刻基于轨道和姿态相关约束求解,结果相对确定,采用标称计划模式实施;落月后,着陆器和巡视器在地面控制下完成分离控制,该过程为中继星、着陆器和巡视器3个目标的耦合控制,控制时序确定,但执行时刻依赖于已执行过程所耗时长动态变化,采用标称计划模式实施;分离之后的着陆器和巡视器相互拍照过程,以及巡视器月面探测过程,均与月面非结构化环境高度相关,需要依据获取的月面地形感知图像进行动态规划,采用遥操作规划工作模式实施。
5.1 标称计划工作模式
标称计划模式主要适用于飞行控制过程相对稳定的阶段。在月球背面探测任务中,适用时段主要包括着巡组合体地月转移、环月飞行、动力下降和两器分离过程控制等飞行阶段及月面工作过程。

图7 计划工作模式执行流程Fig.7 Execution processes of scheduling work pattern
这种工作模式下,测控中心依据飞行程序、理论轨道,汇集飞控相关需求,按飞行时序编排各个控制目标飞行事件对应的测控计划。任务中依据实测轨道及对应的预报数据、控制参数生成各类运行计划,各系统按测控中心生成的测控计划协同完成任务的飞控工作。计划工作模式的示意图如图7所示。

图8 多目标计划联合编排及各目标计划调度运行过程Fig.8 Multiple-object joint nominal planning processes and separate dispatch and execution processes based on different categories and different objects
各目标的测控计划在设计阶段为多目标联合设计,各个控制目标的控制事件均需明确控制目标和上行路由目标。在生成验证阶段为多目标计划和单目标分类计划同时输出,计划生成时对指令计划中的上行路由和测控调度计划中的上行路由进行一致性比对。在运行实施阶段为各单目标计划分别运行,控制目标、上行路由及上行测站等属性传递给遥控处理软件,进行指令格式封装和上行测站选用;软件调度平台依据各目标调度计划实施软件进程调度运行;测控站依据测控站调度计划实施跟踪操作。多目标和单目标计划的设计、生成及运行过程如图8所示。
5.2 遥操作规划工作模式
遥操作规划模式适用于非结构化月面环境感知结果驱动的巡视探测任务规划。巡视器驶离着陆器之后的飞控过程主要包括:两器相互拍照、着陆器科学探测控制、巡视器巡视探测、两器休眠唤醒控制和中继星平台维护控制。其中,巡视器巡视探测采用遥操作规划方式实现探测行为规划及其指令序列自动生成。
遥操作规划模式下,由月面巡视遥操作系统完成月面巡视探测过程的地形建立、视觉定位、任务规划、路径规划、活动机构规划、规划验证、可视化操控和操控指令生成等功能。
月面巡视遥操作规划分为任务整体规划、探测周期规划和导航单元规划共3个层次的规划。在导航单元规划时,通过中继使用窗口获取上行路由和上行测站信息。通过各规划层之间的配合工作,最终生成指令序列,控制月面巡视器完成各项月面工作。遥操作规划主要工作流程如图9所示。
5.3 多目标协同上行控制模式设计
着陆器、月面巡视器在月面通过中继前向和返向链路进行上行指令接收和返向数据发送。在中继前向代传模式下,各航天器目标的代传指令、注入数据、指令链,与各器自传指令在标称计划中统一编排,生成多目标实施计划。遥控发令时,通过多目标协同计划中规划事件的控制目标和上行路由属性,区分自传指令和代传指令。根据自传和代传各自处理流程,实现遥控指令和注入数据的自动生成、指令码按时或按约束条件自动发往对应测站,最终透明上行到指定航天器。

图9 遥操作规划工作模式执行流程Fig.9 Execution processes of teleoperation planning work pattern

图10 多目标上行控制数据生成流程Fig.10 Multiple-object upload command data generation processes
整个过程中的关键步骤是中继前向代传着陆器和巡视器指令时,实现转发注入数据自动生成和指令自动发送。着陆器和月面巡视器遥控指令序列的指令发送前需经过自身组帧处理和代传组帧处理两级组帧处理,即着陆器、月面巡视器的遥控指令先分别经着陆器协议格式、月面巡视器协议格式进行指令和数据组帧处理,再经中继星协议格式处理,然后通过中继星目标的发令测站向中继星发送。具体实现流程如图10所示。
6 “嫦娥4号”任务应用
月球背面探测任务多目标协同控制模式已成功应用于“嫦娥4号”任务飞行控制软件系统和测控网资源调度系统。“嫦娥4号”任务实施过程中,以往探月任务的航天器和本次任务多个目标同在月球表面或绕月轨道附近,测控弧段基本一致。为保证多个任务目标控制过程协调一致性,需进行深空探测任务控制事件及资源的统一规划。任务准备和实施过程中,按各任务目标的控制需求优先级进行控制事件及资源的预规划和重规划。
在“嫦娥4号”任务内部,在月球背面着陆前按服务对象(着巡)控制优先、服务提供方(中继星)控制时机相对灵活的原则进行控制事件及测控资源的预规划。2018年5月21日,“鹊桥”中继星、“龙江1号”和“龙江2号”卫星共3个航天器进入地月转移轨道,测控中心应用该控制模式实施了3个目标的上行控制指令发送和测控网资源分配调度,实现了中继星在Halo轨道和“龙江2号”卫星在环月轨道长期安全在轨运行。在兼顾“嫦娥3号”月面着陆器月面工作、探月工程三期再入返回试验任务服务舱和“嫦娥4号”任务中继星、“龙江2号”卫星飞行控制的同时,2018年12月8日至12日,应用该控制模式相继实现了“嫦娥4号”探测器发射入轨段、地月转移段、近月制动控制;之后在环月轨道实施了着陆器与中继星的两个目标协同控制的前返向链路测试。
7 结 论
本文根据月球背面探测任务需求设计了多目标协同控制模式,重点解决了多目标天地协同规划和上行控制等技术难题,主要设计内容已在“嫦娥4号”任务中得到工程应用。“嫦娥4号”任务成功应用表明,所作设计是合理可行的。该协同控制模式可推广应用于后续的月球探测和火星探测等多目标复杂协同控制任务。
猜你喜欢
建材发展导向(2021年7期)2021-07-16
航天器工程(2019年4期)2019-11-11
中国外汇(2019年6期)2019-07-13
伙伴(2019年12期)2019-01-17
作文通讯·高中版(2017年11期)2017-12-20
北京航空航天大学学报(2017年4期)2017-11-23
太空探索(2015年1期)2015-07-18
中学科技(2015年7期)2015-07-03
太空探索(2014年12期)2014-07-12
太空探索(2014年11期)2014-07-12