“嫦娥4号”中继星任务分析与系统设计
2018-04-12 01:02:04张立华熊亮王鹏孙骥周文艳高珊刘适王晓磊关轶峰张爱兵徐进陈国辉
深空探测学报 2018年6期
张立华,熊亮,王鹏,孙骥,周文艳,高珊,刘适,王晓磊,关轶峰,张爱兵,徐进,陈国辉
(1.航天东方红卫星有限公司,北京 100094;2.北京空间飞行器总体设计部,北京 100094;3.北京控制工程研究所,北京 100094;4.空间电子信息技术研究院,西安 710100)
引 言
“嫦娥4号”任务的着陆器和巡视器着陆在月球背面的“艾托肯”(Aitken)盆地开展科学探测,由于无法直接与地面进行通信,必须研制发射一颗中继通信卫星,将着陆器和巡视器获取的科学数据传回地球,并通过中继提供着陆器和巡视器在落月和月面工作期间的测控支持[1]。
“嫦娥4号”任务的中继星将运行在绕地月L2平动点的Halo轨道上为着陆器和巡视器提供中继通信服务,因此与地球轨道的中继通信卫星不同,也与月球轨道的探测器差别较大,是一个全新的任务,面临一些技术上的挑战,需要提出有效的解决方案,才能为“嫦娥4号”月球背面着陆探测任务提供稳定可靠的中继通信保障。
1 月球中继通信任务面临的技术挑战
“嫦娥4号”中继星是“嫦娥4号”月球背面着陆和巡视勘察探测任务的重要组成部分,根据任务要求,中继星与运载火箭在地月转移轨道分离后,需要利用自身的推进系统实现到地月L2点的转移,完成绕地月L2点Halo任务轨道的捕获,并在使命轨道上长期稳定运行;实现与月球背面“嫦娥4号”着陆器、巡视器与地面测控站和应用站前向/返向的实时和延时中继通信,中继通信原理如图1所示,中继星工作寿命要求3年以上。在完成中继通信任务的同时,中继星上还携带一些科学和技术试验载荷,开展科学探测和新技术试验。
由于首次采用环绕地月L2点Halo轨道,在轨道设计、轨道转移和轨道维持方面都面临一些新的问题;另外,中继通信系统为全新研制,大口径伞状可展开抛物面天线首次在轨应用,也需要解决一些技术难题。
“嫦娥4号”中继星主要面临以下8个方面的技术挑战:
1)适合月球背面中继通信任务的轨道选择和设计;
2)如何快好省地到达使命轨道;
3)确保长期稳定运行的轨道维持控制策略设计;
4)推进系统方案选择;
5)中继通信体制选择;
6)中继通信频率选择和电磁兼容设计;
7)中继通信天线选择和设计;
8)中继通信天线跟踪指向控制;
上述技术问题是“嫦娥4号”中继星任务分析和系统设计的关键,特别是中继星的研制还面临可靠性要求高、重量约束严、研制周期短等各方面的约束限制条件,必须在深入分析“嫦娥4号”中继星任务特点的基础上,综合权衡,统筹兼顾,提出合理可行的解决方案,最终确定中继星的总体设计。
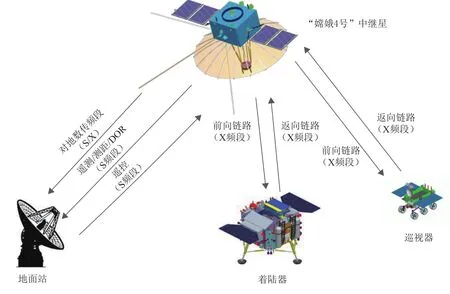
图1 中继星的测控与中继通信链路Fig.1 Relay communication links of Chang’e-4 lunar relay satellite
2 系统设计需要解决的关键问题
2.1 使命轨道的选择和分析
虽然环月轨道用于月球中继通信,具有实现方式较为简单、月面距离近等优点,但是其运动特点决定单颗卫星无法实现对月球背面探测器的连续通信,如果利用多颗卫星组成星座,又会带来测控复杂和成本增加等问题。月球面向地球的总是同一面,如果将中继通信卫星放置于绕地月L2平动点运行的轨道上,借助平动点轨道运动特性,利用单颗卫星即可实现地面站与月球背面的着陆器、巡视器之间的连续不间断中继通信。
与绕月运行轨道相比,绕地月L2点运行的轨道有如下一些优势:
1)能与月球背面连续可见,对着陆器和巡视器中继通信的覆盖率高;
2)采用大振幅的轨道,能够与地球一直可见,便于对地通信和地面站对卫星的跟踪控制;
3)地球或月球遮挡少,基本是全光照,对卫星电源系统设计有利;
4)进入使命轨道所需的速度增量较小;
5)轨道不稳定,需要定期维持,但维持代价比较低。
相对于环月轨道,该轨道用于中继通信任务的不足之处是与月面探测器的通信距离较远,需要大口径的通信天线和较大的发射功率。
早在1966年,美国的Robert W.Farquhar就提出了地月L2点Halo轨道的概念及在这一轨道上放一颗中继卫星对月球背面着陆的探测器提供中继通信的想法[2-3],近年来,美国和欧洲等都论证提出了多个针对月球背面和两极地区的着陆探测任务,其中的中继通信卫星也大都采用了绕地月L2平动点的Halo轨道。
鉴于绕地月L2平动点轨道能够保证中继星与月球背面的着陆器和巡视器连续可见,考虑到“嫦娥4号”着陆器和巡视器的数据传输码速率不高,“嫦娥4号”中继星最终选择了绕地月L2平动点运行的轨道[4]。
地月平动点附近存在多种类型的周期和拟周期轨道,Lissajous轨道和Halo轨道是月球中继通信任务方案可选择的2种类型。在方案确定过程中,针对对地通信链路覆盖特性、阴影情况、使命轨道进入和维持代价等方面进行了详细的比较分析,最终选择了Halo轨道,该种轨道还未在地月平动点轨道航天器上采用过,曾在地月平动点轨道上飞行过的“ARTEMIS”和“嫦娥5T1”采用的都是Lissajous轨道[5-6]。
根据对中继通信效能和卫星设计各方面影响的综合分析,中继星采用了南族Halo轨道,轨道的x向振幅约1.25万km,y向振幅约3.7万km,z向振幅约1.3万km,轨道的平均周期约为14天。2018年6月14日,中继星经轨道捕获控制后形成的使命轨道如图2所示。该轨道与月球背面的着陆器和巡视器一直可见,与单个地面站的可见时间平均约为10 h,考虑到有喀什、佳木斯和南美3个深空站执行任务,每天的可测控时间能够达到23 h以上。
2.2 使命轨道的可靠到达
使命轨道一旦确定,就要解决如何安全可靠到达的问题,由于整星重量约束限制,推进剂消耗量也是设计中需要考虑的一个重要因素。
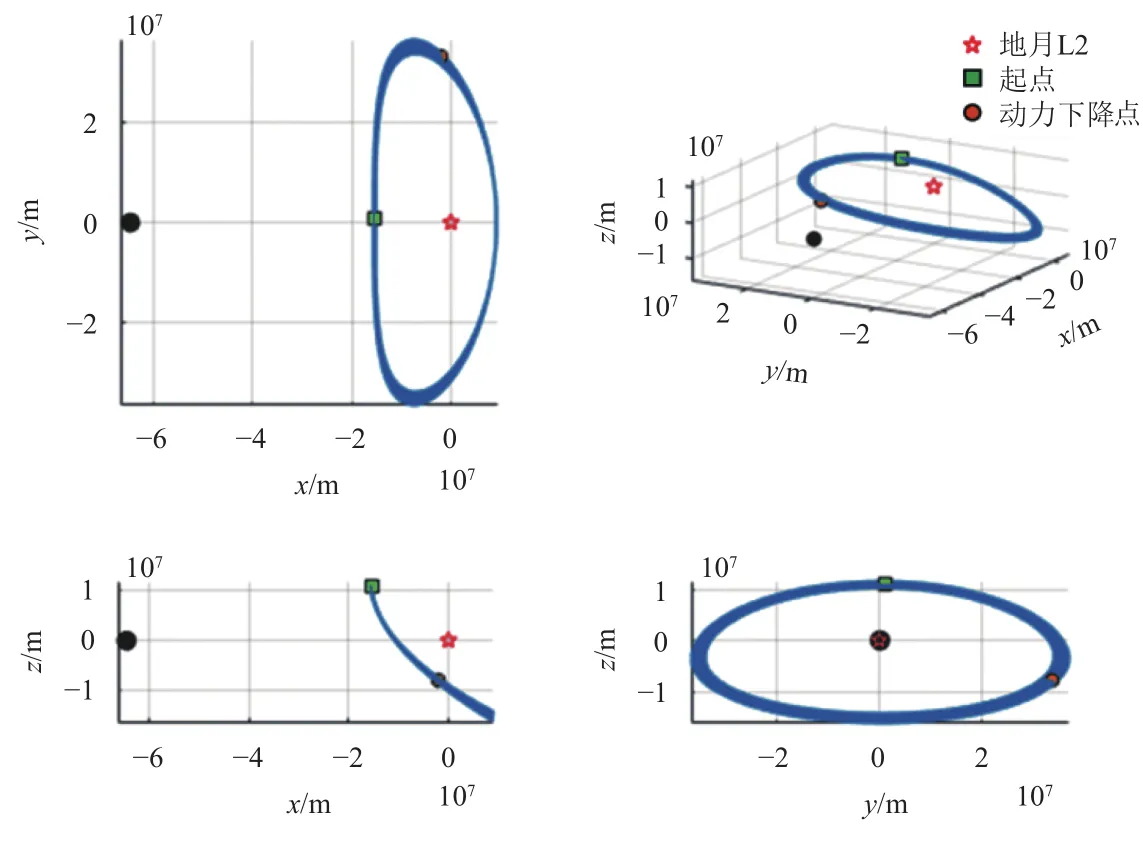
图2 轨道捕获后形成的中继星使命轨道飞行轨迹Fig.2 The trajectory after relay communication satellite capturing the mission orbit
“嫦娥4号”中继星首先由运载火箭送至近地点200 km、远地点40万km、倾角28.5°的地月转移轨道,从星箭分离点到达绕地月L2点使命轨道的转移途径主要包括3种:①直接转移(直接由地球转移至地月L2点);②月球近旁机动转移(利用一次月球近旁借力再转移至地月L2点);③低能转移(通过轨道流形拼接转移至地月L2点)[7]。
尽管直接转移的时间短,但所需的速度增量太大,近900 m/s,目前的卫星重量约束条件下无法满足。虽然低能转移的速度增量需求很小,但转移时间通常要3个月以上,也无法满足任务需求。而月球近旁机动的转移方式则是比较好的选择,既有直接转移飞行时间短的优点,又有低能转移推进剂消耗少的优点。月球近旁机动转移方式要求中继星和月球在合适的位置交会,近月制动控制点的选择非常关键,要综合考虑各方面条件,通过优化设计确定近月制动点速度的大小和方向。在到达近月点实施一次制动后,中继星减速进入飞向地月L2点附近的稳定流形,为确保中继星在到达地月L2点附近后能够顺利进入环绕地月L2点的轨道并通过捕获控制进入预定的Halo使命轨道,近月制动及后续转移段的控制机动均以保证到达地月L2点附近后第一圈轨道的稳定为目标。
由于近月制动速度增量达到200 m/s以上,相应的误差也较大,Halo使命轨道对误差影响非常敏感,图3给出了近月制动沿变轨方向不同大小的误差下飞行轨道的变化情况。从图3可以看出,近月制动后如果不进行中途修正,近月制动误差对到达地月L2点附近时的轨道影响很大,因此在月球至地月L2点转移段,安排了2次中途修正,用于修正近月制动的控制误差,以保证到达地月L2点后捕获段轨道的稳定性。
中继星在进入地月转移轨道时由于受到各种误差的影响,将会在随后的飞行过程中偏离预定的标称轨道。如果不及时进行修正,误差的扩散将会导致中继星到达近月点时严重偏离预定位置,因此也设置了中途修正。
为了提高轨道转移和轨道捕获的控制精度,中继星的制导、导航与控制(Guidance Navigation and Control,GNC)分系统采用了分段式的轨控方式实现高精度轨控,当剩余速度增量较大时,将采用20 N发动机工作,否则采用5 N发动机关调制控制方式。
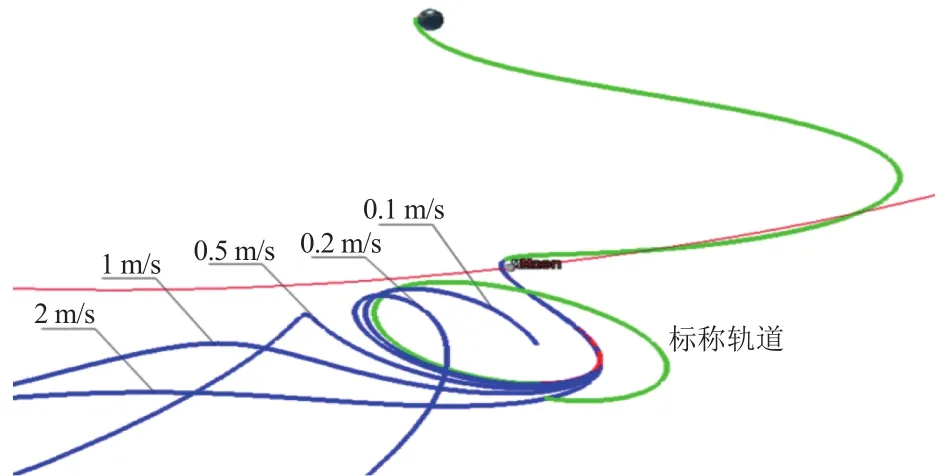
图3 不同近月制动误差条件下的飞行轨道Fig.3 The trajectory at different peri-lunar braking condtions
2.3 使命轨道的长期维持
地月L2平动点轨道是不稳定的,在真实轨道环境下,太阳及其他行星的引力,非限制性引力、太阳光压等摄动因素都会对三体动力学产生影响。此外,由于轨道测量与控制的误差也会使航天器实际飞行轨道出现偏差。在诸多误差因素作用下,若不进行维持控制,中继星将很快偏离标称轨道。与日地系统相比,地月系统平动点轨道动力学更复杂,轨道维持任务面临更大挑战[8-10]。
为了实现真实力模型下的中继星使命轨道维持,采用了连续环绕控制方法,制定了只维持振幅,而不维持其周期的控制策略。方案设计过程中,根据地月L2平动点轨道的测定轨精度和卫星轨道控制精度,经仿真分析,“嫦娥4号”中继星每年的轨道维持速度增量在35 m/s左右,具体见表1。
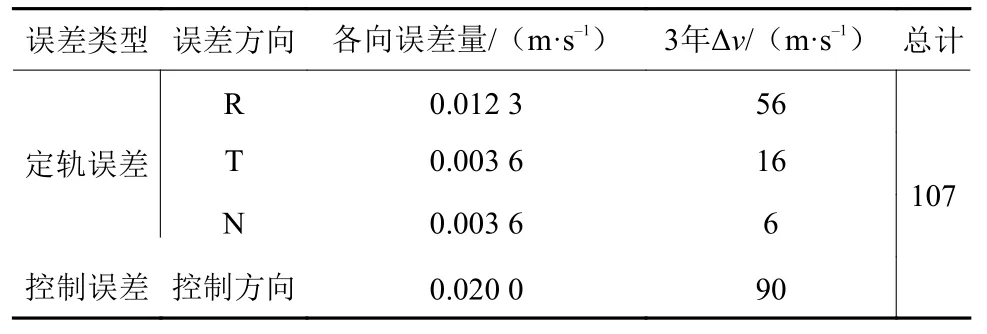
表1 轨道维持的误差量和速度增量需求Table 1 Control errors and Δv requirements of mission orbit maitennance
对于中继星使命轨道的维持,需要在显著降低推进剂消耗的基础上达到很好的轨道稳定保持效果。根据中继星在Halo轨道上6个月的实际在轨飞行控制结果,轨道控制的平均周期为9天左右,每年轨道维持的速度增量预期在20 m/s左右。后续通过数据的积累,能够进一步有效消除系统误差,轨道维持所需的速度增量有望进一步降低。
为了保证轨道维持控制精度,轨控姿态建立和轨控后的姿态恢复,采用动量轮控制方式,以减少5 N发动机姿控喷气对轨道产生的影响。
2.4 推进系统方案选择和推进剂预算
根据任务要求,推进系统尽量使用成熟的产品,以确保安全可靠地完成轨道控制任务。“嫦娥4号”中继星采用了小卫星平台,整星重量不超过450 kg,与双组元推进系统相比,采用单组元推进系统既简单,又可靠,重量更轻,因此中继星最终选择了单组元推进系统,其系统组成如图4所示。推进系统为落压工作模式,采用双分支结构,互为备份,具有极高的可靠性。
与以往的“嫦娥”系列探测器不同,中继星采用单组元的肼推进系统实现了近月制动等需要大速度增量的轨道控制,中继星共配置了4台20 N推力轨控发动机,2台20 N发动机工作也能完成任务,同时5 N姿控发动机也能起到一定备份作用,工作组合多,完成轨道转移任务的可靠性大大提高。
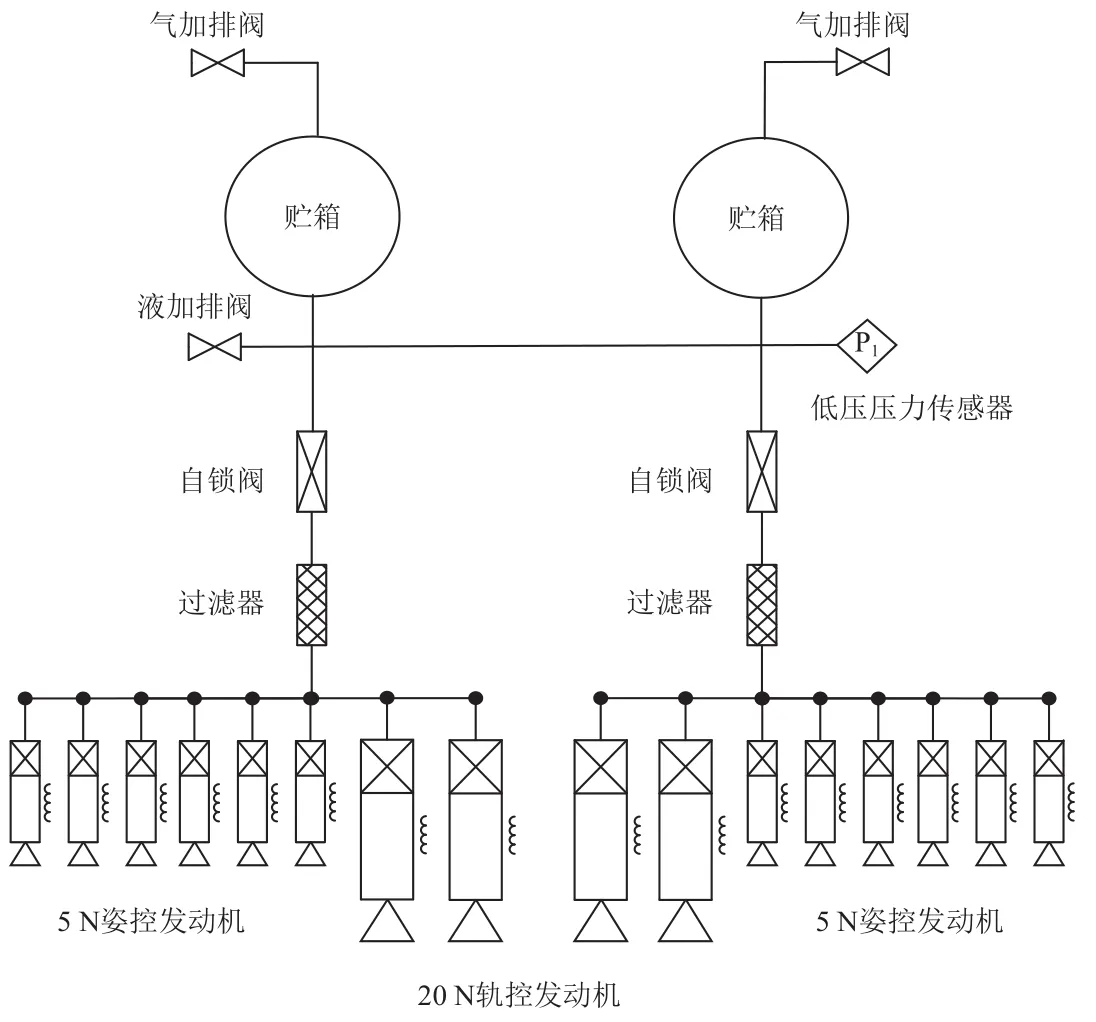
图4 中继星使用的单组元推进系统Fig.4 Hydrozine propulsion system of relay satellite
中继星的推进剂消耗主要在以下方面:地月转移轨道过程中的中途修正、近月制动和L2点Halo轨道捕获以及长期运行过程中的轨道维持,具体推进剂预算和在轨飞行实际的推进剂消耗量见表2。中继星采用2个70 L的推进剂贮箱,装载了105 kg的无水肼推进剂,由于轨道转移和轨道捕获过程的控制精度高,节省了大量推进剂,为确保卫星在Halo使命轨道上长期运行创造了条件。
2.5 中继通信体制选择
中继通信卫星的转发体制主要包括透明转发和再生转发两类,前者只是对转发的信号进行放大、变频等处理,后者除上述功能外,还具有射频波束交换、解调及再调制、基带交换等功能。它们的本质区别在于是否对接收到的信号作解调处理。
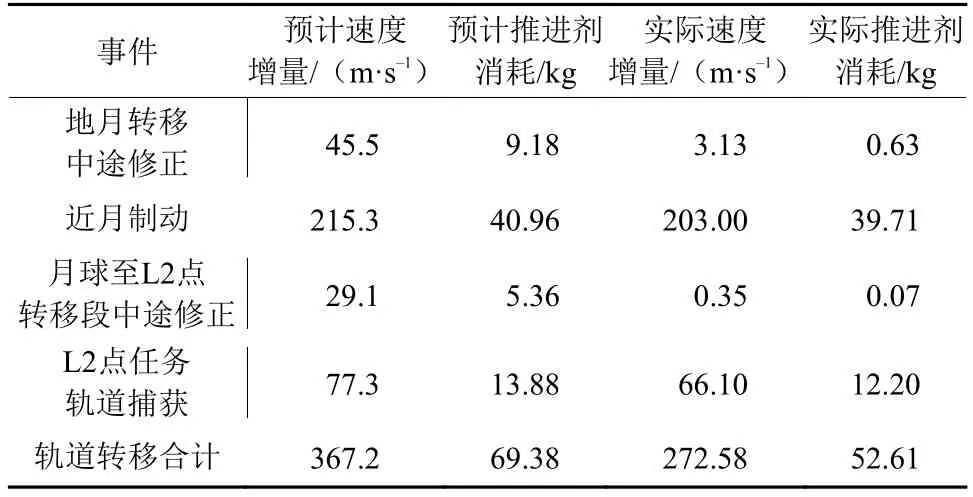
表2 轨道转移和轨道捕获的推进剂消耗Table 2 Propellant used for mission orbit capture and maitennance
透明转发方式简单灵活且易与各种通信协议兼容,适应性强。再生转发方式通过解调重生信号,不会引入转发噪声,在相同的链路增益下,可以减小发射功率和系统规模。
“嫦娥4号”中继星若采用透明转发体制,则深空站的链路总载噪比约为

其中:[C/N]Et为透明转发体制下的地面站接收载噪比;(C/N)u为接收探测器数据的中继返向链路载噪比;(C/N)d为中继星下行链路载噪比。
若采用再生转发体制,转发过程中经过解调后重生无噪声的数字信号,消除了中继返向链路的噪声影响,此时地面站接收系统输入端的信噪比约为

其中:[C/N]Er为再生转发体制下的地面站接收载噪比。
将式(1)和式(2)式相比整理,可得两种体制链路损失为

由式(3)可以计算透明体制链路载噪比相对于再生体制下降的程度,通常由中继星决定的中继返向链路载噪比并不会好于地面站决定的下行链路载噪比,因此,透明体制至少要引入3 dB转发噪声((C/N)u=(C/N)d)。根据“嫦娥4号”中继星的具体情况,若采用透明转发体制,会导致地面站实际接收信噪比相对再生转发体制下降约3.7 dB。考虑到中继星转发链路信号衰减大(总距离超过50万km),码速率要求也相对较高,最终采用了再生转发体制。
当采用再生转发模式时,中继星通过射频接收通道接收来自着陆器和巡视器的数据,对两路数据进行解调、译码、合路,再进行编码、调制,最后由射频发射通道将数据实时传输至地面站或星上存储后再延时转发。与单纯完成转发的透明式转发相比,再生转发不会引入转发噪声,减少了传输误码率,提高了中继通信效能。
2.6 中继通信天线的选择
中继通信天线的尺寸直接决定了中继通信链路的性能,特别是对着陆器和巡视器的返向链路接收能力,主要由天线的尺寸决定,因此在满足各方面约束条件的情况下,应尽可能采用大口径的高增益天线。由于中继星运行在绕地月L2点Halo轨道上,离“嫦娥4号”着陆器和巡视器的最远距离达到7.9万km,并且受着陆器和巡视器的发射功率和天线口径的限制,为了保证中继通信链路的性能,中继星必须选择大口径的通信天线。
根据中继星对天线的高增益和轻量化要求,并结合目前国内大口径天线的研究基础,选择了固网结合的伞状抛物面天线方案,天线口径为4.2 m,增益达到45 dB。该天线也是迄今国内外深空探测任务中所采用的最大口径通信天线,天线发射时收拢,入轨解锁后采用弹簧机构展开,如图5所示。
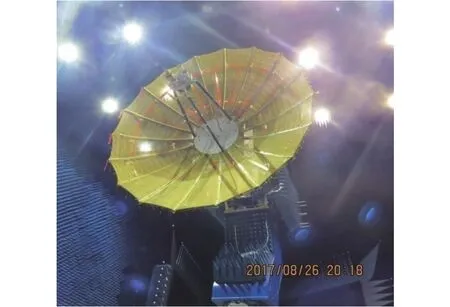
图5 用于中继通信的伞状抛物面天线Fig.5 Parabolic umbrella antenna for relay communication
该天线是中继星完成中继通信任务最关键的一个部件,并且是整星的单点环节,在研制过程中针对该天线的解锁释放、展开锁定、型面精度、耐低温等关键环节开展了大量的仿真分析和充分的地面试验验证,确保了天线的性能和可靠性。卫星发射后,天线顺利解锁展开,在轨标定测试结果表明,天线性能满足任务要求。由于口径大、重量轻、性能好,该天线在未来的深空探测及其它任务中具有非常广阔的应用前景。
2.7 天线指向跟踪控制方式
“嫦娥4号”的中继通信链路工作在超远距离下,为确保中继通信链路畅通,对中继通信天线的增益要求高,天线的可用波束范围窄,必须控制在 ± 0.2°范围内。由于中继通信天线尺寸大,天线自身带二维驱动机构进行指向跟踪控制的代价较大,无法满足重量约束条件,为此中继星充分利用了地月L2平动点轨道上运行的特点,采用了通过平台的指向控制来确保中继通信天线对着陆器和巡视器的高精度指向需求。而在中继通信天线指向着陆器和巡视器的同时,还要考虑对地数传天线波束对地球的覆盖。由于大口径中继通信天线的存在,对地数传天线也难以采用驱动机构来实现指向控制,因此在满足一定增益要求的前提下,对地数传天线的波束角要足够宽,对于中继星选用的Z向振幅1.3万km的Halo轨道,在中继通信天线对月指向着陆器和巡视器的同时,对地数传天线的波束角达到30°左右即可覆盖地球,图6给出了不同Z向振幅轨道下的地球-中继星-月球夹角,即EPM(Earth-Probe-Moon)角,因此对地数传天线选择了波束宽度为± 30°的S频段螺旋天线,这样在月球背面的着陆器和巡视器进行中继通信的同时,不采用驱动机构也可以保证中继星天线对地面站的覆盖。
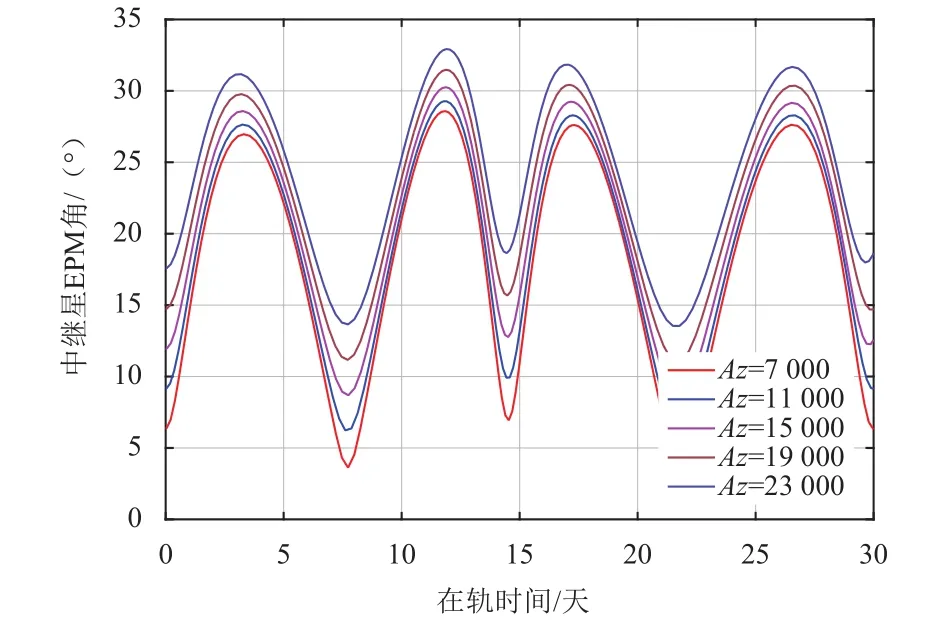
图6 不同振幅Halo轨道的EPM角变化情况Fig.6 EPM angle variation with different Z-amplititude of the mission orbits
采用平台指向控制方式大大降低了卫星的重量和控制的复杂性,规避了天线指向调节机构的使用,但通过卫星平台的指向控制来保证天线的指向,影响指向精度的因素多,精度要求较高。天线指向精度也是完成中继通信任务的关键,在研制过程中对影响天线指向精度的各个因素进行了详细的分析,对关键环节进行了量化控制,并开展了大量的仿真分析和试验验证,确保了天线指向精度满足要求。
实际在轨飞行结果表明,这种控制方式能够很好地满足任务要求。卫星入轨后,采用上海天马站的65 m射电天线进行了中继通信天线指向的测试标定,GNC控制卫星按照螺旋/十字交叉方式对天马站进行扫描,星上通过中继通信前向链路发送单载波信号,地面进行功率测量,根据接收到的电平信号,结合卫星姿态数据就可以计算出天线指向误差。不同轨道位置下的指向标定测试结果表明,中继通信天线的指向精度均在0.1°以内,满足小于0.2°的任务要求。
2.8 星上频率选择和电磁兼容分析
由于需要与着陆器和巡视器已有状态兼容,中继星各工作频点接近,并且中继通信距离远,卫星接收到的信号电平弱,射频发射功率也较大,根据任务要求,中继星的对地数传链路,中继返向链路,中继前向链路有同时工作的要求,需要考虑几个频段同时工作时相互之间的影响,对整星电磁兼容要求高。
着陆器和巡视器的测控和数传系统均采用了X频段,因此中继星的中继通信链路也必须与之匹配而采用X频段,但对地数传频段的选择则要考虑在实时中继通信模式下的电磁兼容问题。由于中继通信采用了X频段,对地数传如果也采用X频段,按照国际电联的规定,只能在8 450~8 500 MHz的50 MHz频率范围内选择,同时对着陆器和巡视器的中继返向链路的频点也在这一范围内,中继星返向接收电平将远大于其动态范围,会对中继返向接收链路造成强干扰而无法工作。在Ka频段尚不具备应用条件的情况下,对地数传选择了S频段。
除了中继通信分系统自身的电磁兼容性,还要考虑与测控系统的兼容性,为了避免与X频段中继通信发生同频干扰,中继星的对地测控选择了S频段统一载波体制。
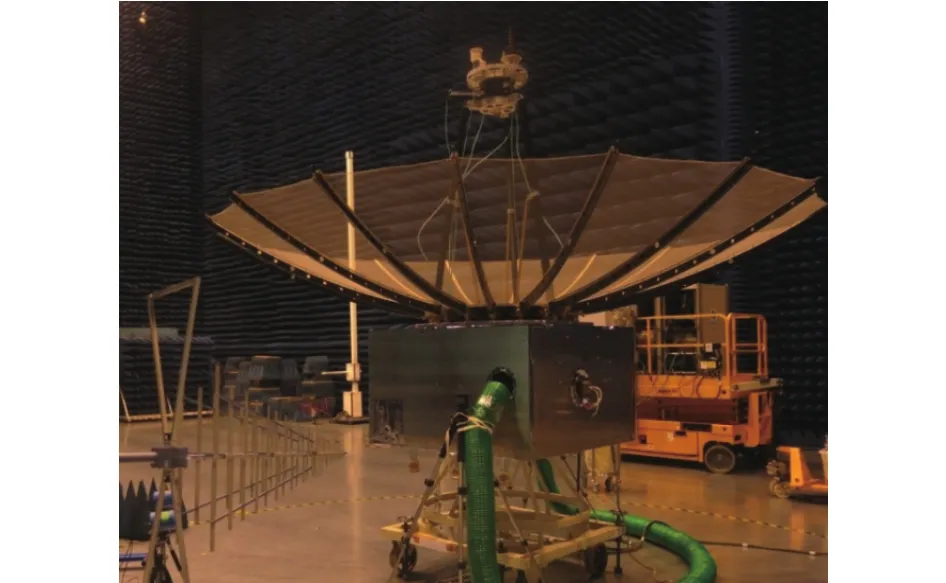
图7 正样星在微波暗室中进行EMC试验Fig.7 EMC test of fligh modal
中继星的对地数传有实时数传和延时数传两种模式。在实时数传模式下,为避免干扰X频段中继通信链路,对地数传只能采用S频段数传方式。延时数传模式下,对月中继通信和对地数传处在分时工作状态,不存在同频干扰问题,可以使用X频段数传系统。在S频段对地数传出现故障时,采用X频段数传可以起到异构备份的作用,提高了中继通信系统的可靠性。
由于中继星频点多,上、下行信号电平相差大,电磁环境复杂。在设计上通过上下行隔离、前返向隔离、天线间隔离等措施,确保了系统电磁兼容。对于测控上下行和中继前返向的射频信号首先采用不同旋向波束和不同频带进行隔离设计。对于测控信道采用上下行天线独立设计,并且布局上尽量远离,保证上下行测控信号的空间隔离,同时测控接收天线与应答机采用一对一设计,保证通道间的相互隔离;对地数传天线与测控天线布局上尽量远离,保证空间隔离度,同时对输出的大功率信号进行输出滤波,抑制干扰信号;中继通信的前向、返向链路除了采用不同旋向隔离外,还对前向链路大功率信号进行了带外抑制,保证其不会对返向链路信号产生干扰。
除了设计上采取措施还必须进行试验验证,在研制之初就规划制定了包括辐射模型星测试、整星电磁兼容试验等试验验证项目,且在设计阶段和正样研制阶段分别进行了验证,确保了整星电磁兼容性满足要求。
3 中继星总体技术方案概述
“嫦娥4号”中继星基于航天东方红卫星有限公司的CAST100小卫星平台研制,整星重量约448 kg,太阳电池阵最大输出功率约800 W;卫星本体为长方体构型,本体尺寸为1.4 m × 1.4 m × 0.85 m,采用蜂窝夹层板式结构形式,星体两侧分别安装单轴驱动的太阳翼,星体底部采用Φ937接口与CZ-4C运载火箭相连,中继星发射前的状态如图8所示。
中继星采用了“星敏+光纤陀螺”定姿方式,配置了将光纤陀螺和加速度计集成在一起的新一代惯性测量敏感器,姿态控制采用整星零动量控制方式,可以实现对地、对月(着陆器/巡视器)、对日等任意惯性空间的三轴稳定控制,提供优于0.06°的指向精度和优于0.005°/s的稳定度;采用单组元推进系统,携带了105 kg无水肼推进剂,可提供超过550 m/s速度增量的轨道控制能力。配置12个5 N发动机和4个20 N发动机,满足姿态控制、到地月L2平动点Halo轨道的轨道转移和在使命轨道上的轨道维持需求。中继星进入使命轨道后的整个寿命期间,每隔1~2周对卫星的轨道进行维持控制。为了提高轨道转移和轨道捕获控制精度,GNC分系统采用了分段式的轨控方式,当剩余速度增量较大时,采用20 N轨控发动机工作,否则采用5 N姿控发动机关调制轨控方式,中继星在轨运行状态如图9所示。

图8 中继星发射前状态Fig.8 Relay satellite before launching
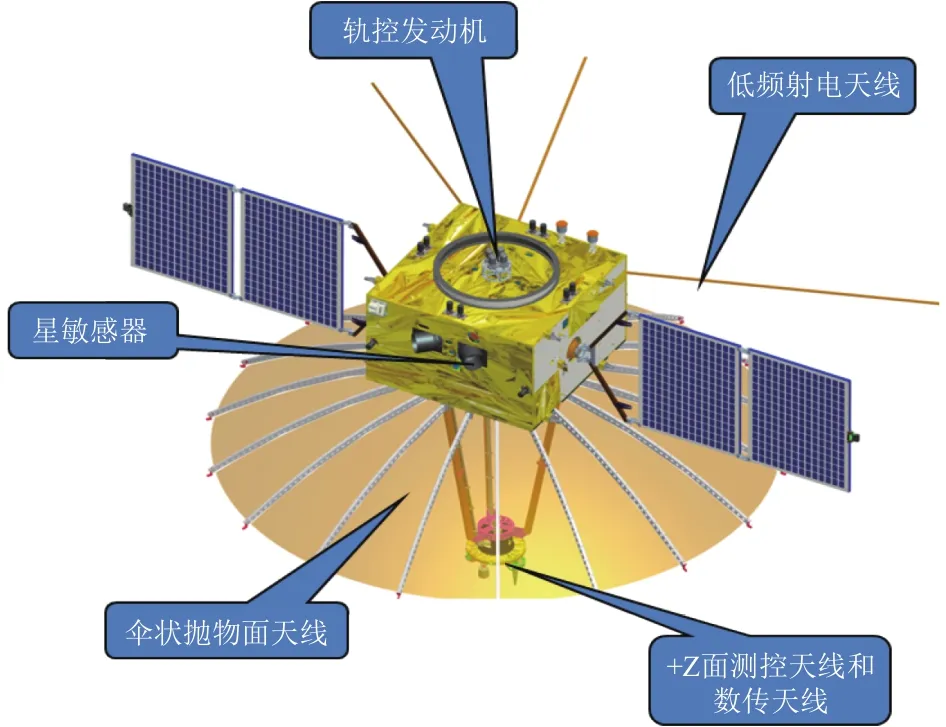
图9 中继星在轨运行状态Fig.9 Relay satellite configuration during on-orbit operation
卫星采用面积为3.8 m2的三结砷化镓太阳电池阵和45 Ah的NCA高比能量锂离子蓄电池组为星上设备提供能源,采用不调节供电母线及分散式的配电体制,非地影期间的母线电压可维持在29.5 ± 1 V。对地测控采用USB(Unified S-band)测控体制,两台模拟应答机和两台数字应答机实现双点频异构备份,配置两台10 W固放和6付低增益螺旋天线(4付接收天线和2付发射天线),上行遥控码速率为1 000 bits/s,下行遥测码速率为2 048 bits/s,数字应答机还支持再生伪码测距,能够大幅提升深空任务的测距能力。中继星利用控制器局域网络(Controller Area Network,CAN)总线形成了分布式的信息拓扑结构,各设备以节点形式与星上网构成功能密集、配置灵活的集散系统结构。以整星优化为目标,以硬件资源统一应用、充分发挥软件效用为原则,使星上各设备在星务综合管理单元统一管理下成为一体化有机整体。
中继通信链路采用对地链路统一,对月链路独立的设计方式,即地面发送的中继星与两器的上行指令与数据统一使用一条链路,中继星与两器的下传数据统一使用一条链路;中继星向着陆器和巡视器转发指令及数据分别使用一条独立的链路,中继星接收着陆器和巡视器数据时也分别使用一条独立的链路。为了与着陆器和巡视器现有状态兼容,中继通信链路采用X频段,使用口径Φ4.2 m的高增益伞状抛物面天线,发射时收拢,入轨后展开,收发共用,在 ± 0.2°波束范围内的增益大于45 dB;对月前向链路为PCM(Pulse Code Modulation)/PSK(Phase Shift Keying)/PM(Phase Modulation)调制方式,采用20 W固放,码速率为125 bits/s。返向链路采用BPSK(Binary Phase Shift Keying)调制方式,能够支持多个频点和多种码速率,对着陆器的返向接收码速率有1.4 kbits/s、50 kbits/s、280 kbits/s、555 kbits/s4种,对巡视器的返向接收码速率有0.7 kbits/s、140 kbits/s、285 kbits/s3种。对地数传采用S频段,BPSK调制方式,配置两台43 W固放和一付中增益螺旋天线(收发共用),码速率有1、2、4、10 Mbits/s4种,可根据需要选用;在分时工作模式下,卫星还可以通过姿态机动,利用对月中继通信的高增益抛物面天线实现X频段的对地数据传输,码速率为10 Mbits/s。
中继星的设计寿命为5年,在完成“嫦娥4号”中继通信任务的同时,还搭载了荷兰研制的低频射电观测仪器、中山大学研制的激光反射镜等搭载载荷,在轨可开展10 kHz~80 MHz范围内的低频射电天文观测、超地月距离的远距离激光测距[11]、地月成像观测、再生伪码测距等科学探测和技术验证试验,能够充分发挥中继星的效益。
4 结束语
“嫦娥4号”任务意义重大,将实现人类航天器在月球背面首次软着陆和巡视勘察探测,而中继星将首次实现地月L2平动点轨道上的中继通信。在深入分析“嫦娥4号”中继星任务特点的基础上,根据任务需求和各方面的约束条件,经过综合权衡和优化设计,解决了关键技术问题,确定了“嫦娥4号”中继星的总体技术方案。
经过两年多的艰辛研制,中继星于2018年5月21日由“长征4号丙”运载火箭在西昌卫星发射中心成功发射,经过5次精准的轨道控制后,中继星于6月14日进入了绕地月L2平动点的Halo使命轨道。随后顺利完成了卫星平台和有效载荷的各项在轨测试工作,卫星状态良好,各项功能和性能满足了任务要求,具备了为着陆器和巡视器提供中继通信服务的能力,也验证了卫星系统设计的正确性。“鹊桥”已经搭建好,等待“嫦娥4号”着陆器和巡视器的到来。
除了对着陆于月球背面的着陆器和巡视器提供中继通信支持外,在中继星方案设计中,充分考虑了拓展应用能力,一方面能够支持搭载的科学和技术试验载荷完成在轨的科学探测和技术试验任务;另一方面,卫星的设计寿命达到5年以上,在完成对“嫦娥4号”着陆器和巡视器中继通信任务的同时,还有望对未来其它国家月球背面或两极的着陆和巡视探测任务提供中继通信服务。
在未来载人登月及其它载人深空任务规划中,地月L2平动点是作为中转站的一个重要选择,“嫦娥4号”中继星在地月L2平动点Halo轨道长期运行中所获得的经验对后续的载人登月及深空探测任务也有很好的借鉴作用。同时地月平动点轨道在对地观测、导航、空间科学等领域还有重要的应用价值,中继星的研制和应用也为未来地月平动点的开发利用奠定了良好的基础。
猜你喜欢
计算机测量与控制(2021年8期)2021-08-23 09:02:16
航天器工程(2019年4期)2019-11-11 03:41:00
载人航天(2019年1期)2019-03-07 01:41:02
伙伴(2019年12期)2019-01-17 04:38:56
北京航空航天大学学报(2017年4期)2017-11-23 05:48:48
电信科学(2017年6期)2017-07-01 15:44:35
电子器件(2015年5期)2015-12-29 08:43:30
航天器工程(2015年3期)2015-10-28 03:35:28
中学科技(2015年7期)2015-07-03 05:44:32
电子设计工程(2015年16期)2015-02-27 12:07:46