深空探测器大口径天线指向在轨标定方案
2018-04-12 01:02:14熊亮王锦清孙骥关轶峰陆波
深空探测学报 2018年6期
熊亮,王锦清,孙骥,关轶峰,陆波
(1.航天东方红卫星有限公司,北京 100094;2.中国科学院 上海天文台,上海 200030;3.北京控制工程研究所,北京 100094)
引 言
深空探测是当今世界高新科技中极具挑战性的领域之一,是众多高新技术的高度综合,也是体现一个国家综合国力和创新能力的重要标志,对促进国家科技进步、推动产业发展、提升国际影响力具有重要的意义。
为了尽可能降低探测器的研制复杂度,深空探测中的器地通信,通常通过采用地面超大口径天线的方式,实现地球与深空探测器的通信联络,保证链路的通信裕度[1-3]。
随着人类深空探测脚步逐渐迈向更远的太空,深空探测器与地球的距离越来越远,信号衰减不断增大,同时探测器间的通信需求也在不断增加,为了保证探测器与地球、探测器间的畅通联络,深空探测器逐步开始安装了大口径天线,以获得更好的通信效果,为了保证良好的通信链路,大口径天线需要准确指向地球或目标飞行器,因此对天线指向精度提出了更高要求,探测器通过高精度的指向控制,可以使天线精确指向地球或目标飞行器,但是为了对探测器天线的在轨指向精度进行评估和确定,需要对大口径天线的指向进行在轨标定。
本文针对深空大口径天线的指向精度问题,分析了探测器天线指向误差情况和指向标定测试的约束条件,针对误差和约束条件提出了基于射频信号测量的探测器天线指向在轨标定方案。分析了标定的精度,以及要达到相关精度需要满足的前提条件,最后对测量误差进行了分析。
1 天线指向误差
天线指向的误差会使得探测器天线对地球或其他探测器的天线指向增益发生变化,从而影响探测器天线与地球或探测器间的通信效能,对任务控制和实施流程带来直接约束。探测器天线的指向误差受探测器姿态指向偏差、天线电轴偏差、轨道计算等诸多因素影响,各项影响因素综合起来都反映到了天线指向的偏差上,对于大口径天线通常以3 dB波束角作为指标,对于深空探测器,希望获得更大的系统性能,根据实际需求会考虑以2 dB波束角作为使用约束条件,因此对天线指向误差的要求在0.2°以内。
2 天线指向在轨标定约束条件分析
通过对探测器天线指向误差的分析,可知探测器天线在轨指向标定的精度要求,需要在0.1°以内,才能保证测量结果的有效性,需要考虑的因素包括:系统测量链路情况,探测器对测量方案的支持能力,天线的方向图特性、接收系统性能等。
2.1 系统测量链路
利用射频信号进行天线指向标定的方法,需要地面测量系统接收探测器发送的射频信号。由于深空探测器距离地球都在几十万千米以上,空间链路损耗造成的信号衰减对射频信号的接收提出了很高的要求。
以深空探测常用的X频段单载波信号作为地面标定信源,以器地通信距离为36万km,X频段单载波信号EIRP(Equivalent Isotropically Radiated Power)50 dBW为例,地面系统接收电平估算见表1。
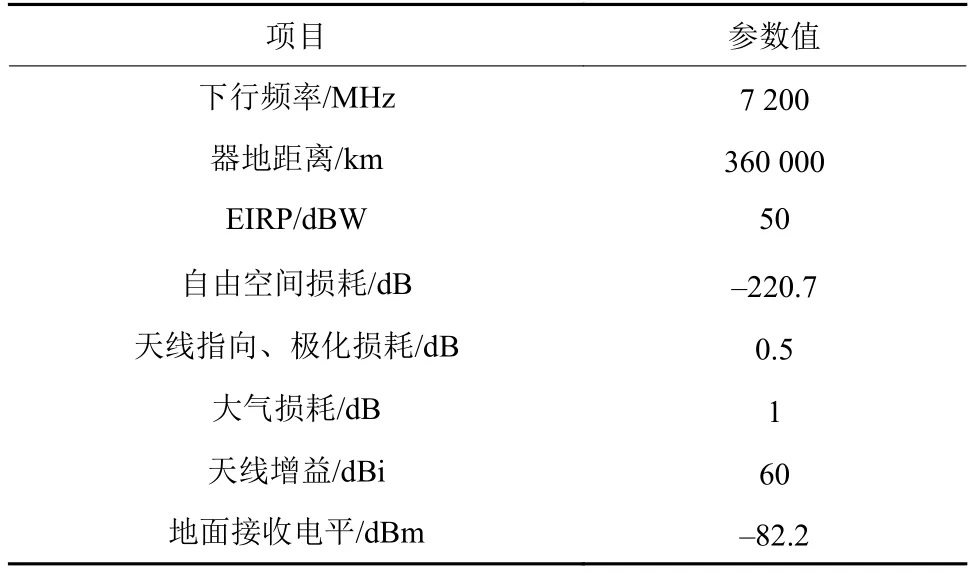
表1 接收电平估算表Table 1 the table of signal link budget
因此,地面测量系统需要具备60 dB以上的天线增益和-90 dBm以上的信号接收能力,才能开展标定工作,需要高性能的接收系统才能完成信号的接收和测量。
2.2 探测器支持能力
为了标定出探测器的天线指向精度,探测器需要具备对标定测量系统的指向跟踪和扫描能力。
探测器的指向跟踪能力会影响其天线指向精度,跟踪的稳定度会带来天线绝对指向的偏差,跟踪稳定度越高,天线指向越准确,标定的精度也越高。探测器的跟踪稳定度由其控制稳定度决定,现今的卫星姿态控制可以较容易地实现0.05°以内的指向控制精度,能够满足标定的精度要求。为了支持在轨标定,还需要探测器具备对目标进行扫描的工作模式。
另外,天线指向标定采用单载波信号测量方式,需要探测器具备发送稳定射频单载波信号的能力,同时根据空间链路的计算可以看出,对于单载波信号的发射功率强度也有一定的要求。
2.3 天线的方向图特性
根据天线特性,探测器所采用的大口径天线方向图具有高增益、窄波束、大滚降特点,在主瓣内,天线增益对角度变化敏感。以4 m口径天线为例,其天线增益方向如图1所示,从图1中可以看出,0.5°的角度变化就可以带来约6 dB的增益变化,角度越小,天线增益变化越小,对测量精度的要求也越高。如果飞行器具备0.05°的姿态控制能力,姿态指向误差带来的增益变化在0.05 dB以内。
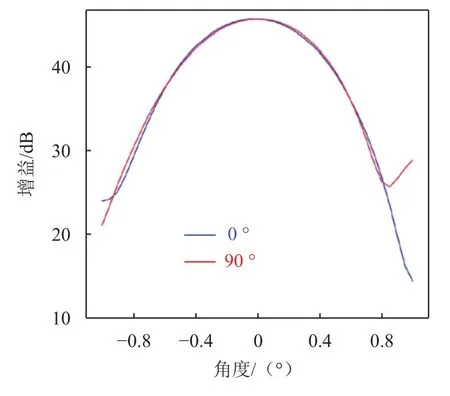
图1 天线增益图Fig.1 The figure of antenna gain
2.4 接收系统性能
根据空间链路计算分析,由于探测器发送的射频信号,经过长距离的空间衰减,地面接收到的信号强度已经很低,需要接收系统具备低电平信号接收能力,同时在对接收信号进行放大处理时,要保证良好的增益稳定性,否则将引入测量误差,影响对接收信号强度的判断,从而影响对指向精度的测量分析结果。
由于地球不断自转运动,在探测器指向地面测量系统的同时,地面测量系统也要精准地指向探测器,才能保证系统标定的测量精度。根据天线方向图的特性,0.1°波束角的增益变化在0.3 dB,要通过射频信号测量准确标定天线指向,需要接收系统的射频信号稳定度在0.3 dB以内。
3 天线指向标定实施方案
3.1 标定试验基本思路
天线指向标定采用天线指向标定地面站,地面站对接收到的探测器前向信号进行观测,探测器按照程序对地面站进行指向扫描,根据地面站接收到的信号与探测器姿态的关系,对比地面测量的天线方向图,分析确定天线指向状态。
3.2 接收系统的选择
射电望远镜用于观测和研究来自天体的射电波,可以测量射电体的强度、频谱及偏振等观测量,大型射电望远镜具有接收灵敏度高,指向精度高,增益控制稳定、工作波段覆盖宽等特点。
上海天文台65 m天马站射电望远镜在7.2 GHz上3 dB波束宽度为160″,C波段覆盖频率4~8 GHz,为了保证天线指向标定测量的稳定性,建立了副反射面随动模型,用以补偿不同仰角下,由于地球重力带来的天线反射面变化造成的天线效率变化。在整个观测俯仰角上,测试了天马望远镜7.5 GHz左右旋接收效率曲线,结果如图2所示。
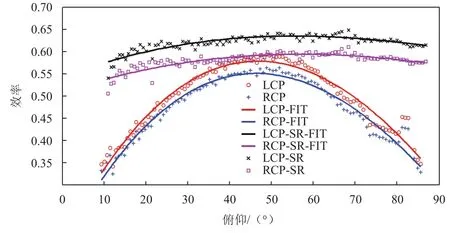
图2 C波段7.5 GHz左右旋全俯仰上效率Fig.2 The efficiency curve of C band at 7.5 GHz
图2中同时给出了副面随动模型启动前后的情况,上面2条曲线为副反射面随动状态,下面2条曲线为副反射面固定状态,可以看到在副面模型启动后,效率可以控制到60%左右,如果副面模型不启动,在高低俯仰上效率明显下降,需要采用效率曲线对观测数据进行修正。
图3为上海天文台65 m天马射电望远镜在副反射面随动工作状态下,接收C波段射电源信号情况(蓝色为左旋,红色为右旋),可以看出,天马射电望远镜接收C波段信号的稳定度在0.1 dB以内[4]。
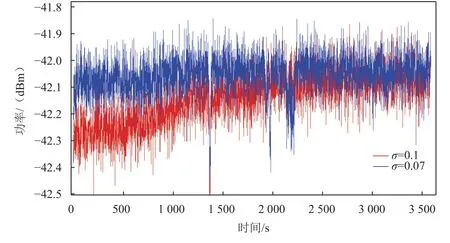
图3 射电源3C273B双圆极化测试结果Fig.3 The test curve of antenna polarization to radio source
3.3 姿态控制精度的确定
如果探测器采用整器指向控制方式控制天线指向,需要在标定前确定整器姿态控制的稳定性;若探测器天线采用机构主动控制方式控制天线指向,除了需要确定整器姿态控制的稳定性,还需要确定天线机构控制稳定性。
首先要对星敏感器进行标定,探测器通常安装有2个星敏感器,在飞行前已经进行了安装精度测量,获取了准确的相互精度关系,在轨飞行后,可以根据2个星敏的测量数据,对2个星敏的相对精度进行修正,将测量基准统一,作为姿态控制精度确定基准,星敏感器的精度优于±5″,远高于天线标定所需精度。
完成星敏校准后,需要根据星敏测量数据,确定姿态控制精度是否满足精度要求,同时还可以分析出姿态控制的精度情况。得到的整器姿态实际控制能力可以作为地面分析测量误差的依据。
3.4 扫描方式
天线指向标定采用对地面接收系统(地面站)进行扫描的方式,根据探测器天线的设计状态,可以采用整器姿态摆动的扫描方式或天线自摆动扫描方式,如图4所示。飞行器通过指向控制以地面测量站为中心按照一定速率,进行不同方向和角度的偏转,地面站根据飞行器轨迹指向飞行器,在飞行器进行偏转的同时,实时测量接收信号的幅度,之后,将收到的信号与飞行器偏转方位和角度信息进行匹配分析,计算出指向偏差,完成指向标定。扫描可以采用十字扫描或螺旋扫描两种方式。
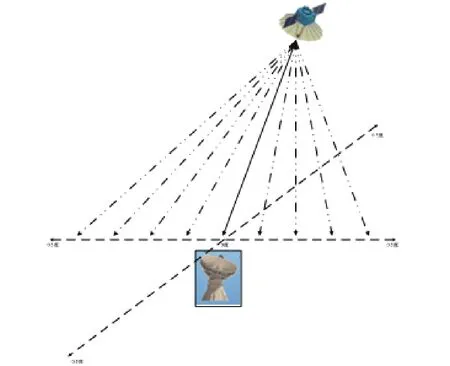
图4 天线指向标定扫描示意图Fig.4 The figure of calibration sweep
3.4.1 螺旋扫描
控制天线以地面站为中心进行等宽度的螺旋扫描,0.6°的螺旋扫描轨迹如图5所示。
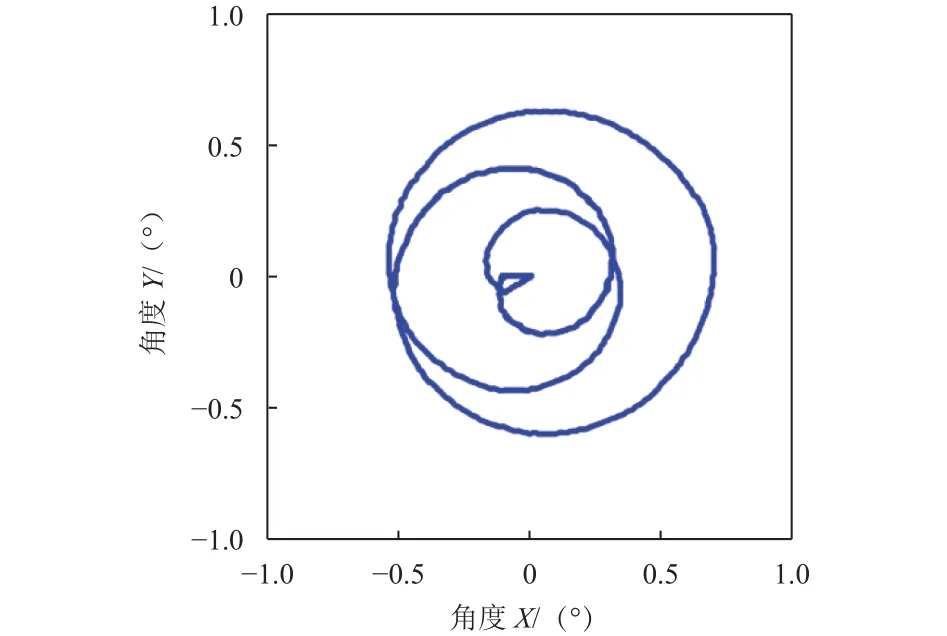
图5 0.6°的螺旋扫描轨迹图Fig.5 The figure of spiral scan(0.6°)
3.4.2 “米”字扫描
控制天线以地面站为中心进行等宽度的俯仰、滚动正交摆动扫描,还可以根据需要进行“米”字型扫描,以得到多个切面方向图的扫描数据,“米”字扫描如图6所示。
3.5 天线指向标定流程
按照上述扫描方式,天线指向标定测试的流程如图7所示。
1)注入地面站位置数据,注入参考时刻、恒星时角、地面站地心距、地面站经度、地面站纬度。
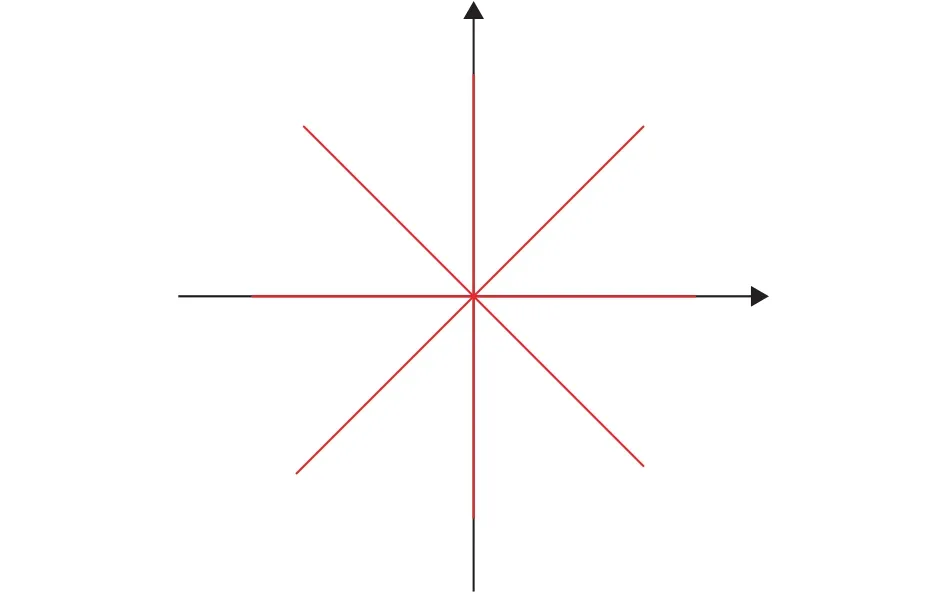
图6 “米”字扫描示意图Fig.6 The figure of cross scan
2)启动跟踪,①启动探测器跟踪地面站,注入跟踪目标姿态标志,指定+Z轴(天线指向轴)跟踪指向地面站;②地面站根据预先测量得到探测器轨道数据,控制地面站天线指向并跟踪探测器。
3)注入扫描数据,包括扫描角度和速度等扫描参数。
4)数据采集,①进行天线指向扫描,探测器根据地面注入的扫描数据,自主进行扫描姿态机动;②在探测器进行扫描时,地面站使用功率计、频谱仪等测量设备对接收到的单载波信号进行测量,并记录每个测试数据的测量时刻时间。
5)地面计算天线指向补偿误差角,扫描过程结束后,地面通过遥测得到扫描滚动角、扫描俯仰角,星上时与地面基准时相关后,根据接收信号电平测量值计算天线指向补偿误差角。
6)注入补偿误差角。如果测得的天线指向误差较大,则注入天线指向补偿滚动角、俯仰角,再次进行测量,直到满足指向精度要求。
4 标定测量误差分析
影响天线指向标定测试结果的因素包括地面标校系统误差和天线指向误差,地面标校系统误差包括地面站天线指向与跟踪误差、地面站天线型面精度、地面站增益稳定度和设备测量误差,如图8所示。
地面接收系统的系统误差小于0.2 dB,带来的波束指向测量误差不超过0.05°,小于0.1°的测量分辨要求,可以标定卫星高增益天线的指向。
由于探测器在轨道上不断运动,指向地面站的偏差可以大概分为3类:①固定偏差(主要是安装偏差等);②长周期误差(主要包括天线热变形、星历误差、测定轨误差等长时间缓慢变化的误差);③短周期误差(主要是星敏测量误差、控制误差等)。固定偏差和长周期误差对短时间内(几个小时)内的探测器指向影响相对固定,测量结果影响也相对固定,只产生相对固定的稳定偏差,近似认为该两项误差为固定误差,短周期误差实时影响探测器姿态,对天线指向产生实时影响,是一种随机误差,探测器的姿态指向精度0.05°是实时测量不确定性的主要影响因素,0.05°的指向误差产生的天线增益变化小于0.05 dB,对测量误差的影响很小,因此,可以认为,除去接收测量稳定度0.2 dB带来的波束指向测量误差0.05°外,测试结果所对应的卫星指向偏差就是固定偏差和长周期误差带来的,消除该误差,就可以使卫星准确指向目标位置,达到指向要求。
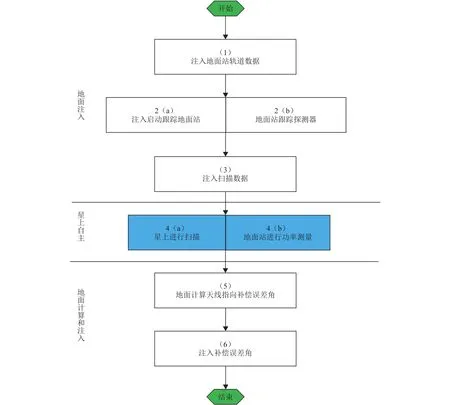
图7 天线指向标定流程图Fig.7 The flowchart of calibration
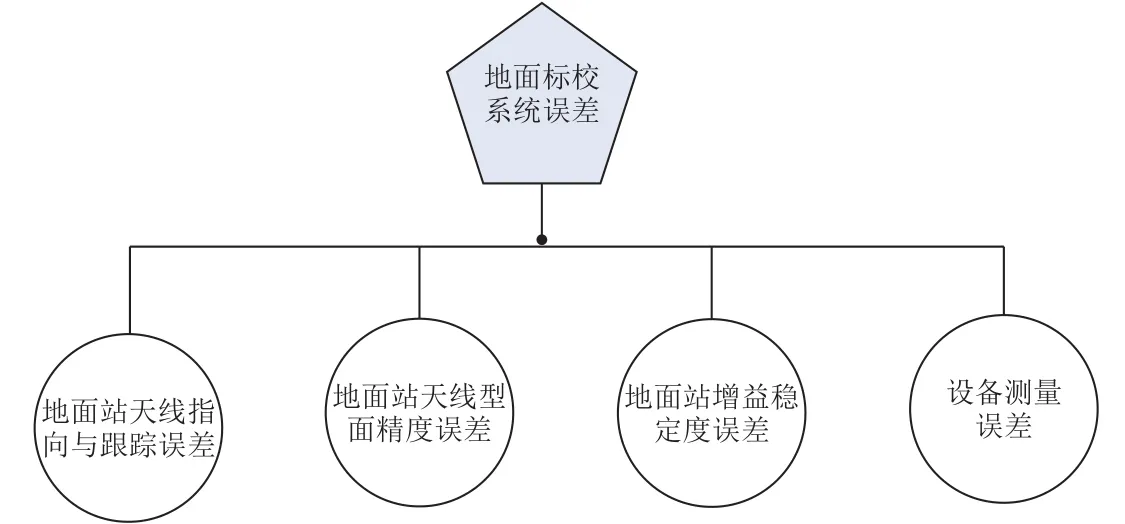
图8 地面标校系统误差项Fig.8 The figure of error statistics
根据天线方向图特性,当天线指向偏差很小(小于0.1°)时,测量结果应当与天线实际测试结果相似,只是在波束中心附近叠加了0.1 dB的不稳定度,使得测试得到的波束中心变得平坦了,如果天地回路大系统状态下的测量结果能小于0.3 dB,就说明探测器天线的指向精度已经优于0.1°的精度了;当天线指向偏差达到3 dB带宽波束角时,测量结果应当与天线实际测试相比出现不对称性,测量最大值不出现在中心指向处,而是出现在偏离中心的位置上,这时可以根据测试结果和天线方向图,判断偏差方向和角度;当天线指向偏差达到0.6°以上,测量结果会与设计电平值出现10 dB以上的偏差,这时通过地面电平可以判断天线指向出现大角度偏差,对探测器设置多个方向大的姿态角度修正后,通过多次测量判断指向偏差方向,再进行天线指向修正,然后进一步测量天线偏差,经过反复迭代修正,可以使天线指向精度满足要求。
“嫦娥4号”中继星采用了4.2 m大口径可展开抛物面天线与月球背面的着陆器和巡视器进行通信,为了保证通信链路裕度,需要天线指向精度控制在±0.2°内。“嫦娥4号”中继星天线指向在轨标定采用了上述方案,利用上海天文台65 m天马射电望远镜,通过进行多次“米”字型及螺旋扫描,实现了对中继通信天线指向的准确标定。图9为“嫦娥4号”中继星天线在轨标定波束扫描结果,波束在4个切面上对称性良好。测试结果表明天线指向精度优于±0.1°。
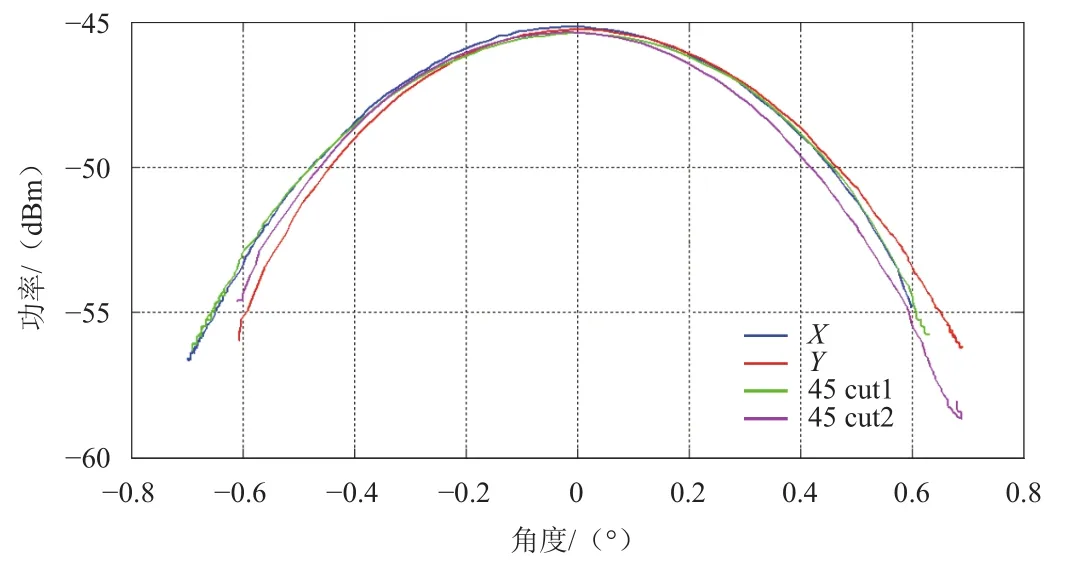
图9 ±0.6°米字型扫描结果Fig.9 The figure of cross scan result(±0.6°)
5 结 论
本文给出了深空大口径天线指向精度的标定测试方案和实施步骤,对影响标定的各项因素进行了分析,给出了标定各环节的指标要求,并对测量的误差进行了分析,给出了对不同天线指向误差状态下的处理方法。本方案已经应用在了“嫦娥4号”中继星任务中,取得了良好的标定测试效果,可为后续深空任务大口径天线的指向精度测试标定提供参考与借鉴。
猜你喜欢
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28 06:19:00
汽车维修与保养(2020年11期)2020-06-09 05:42:16
小学科学(2020年1期)2020-02-18 06:26:40
百科探秘·航空航天(2020年12期)2020-01-22 08:57:19
小学科学(2019年12期)2019-01-06 03:38:45
传媒评论(2017年8期)2017-11-08 01:47:36
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年3期)2016-11-07 09:03:34
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10 02:35:38
太空探索(2014年9期)2014-07-10 13:06:30