“嫦娥4号”中继星中继通信方案研究与分析
2018-04-12 01:02徐进张爱兵贺一峰杨光文
深空探测学报 2018年6期
徐进,张爱兵,贺一峰,杨光文
(空间电子信息技术研究院,西安 710100)
引 言
月球自转周期与绕地球公转的周期相同,所以它永远以同一面朝向地球。作为天基测控系统,数据中继卫星大大提高了对用户星的覆盖率,减少了地面布站的数量,节约了成本,是各主要航天国家重点建设的航天系统之一。在月球背面着陆的“嫦娥4号”着陆器和巡视器与地面测控站不仅相隔遥远,而且还由于月球遮挡无法进行通信联系,这就需要中继通信卫星的支持来解决测控和数据传输问题[1]。
地月L2平动点位于地球至月球连线的延长线上,与地球、月球的位置相对固定。中继星在地月L2点附近可进行长期环绕飞行,对月球背面一直连续可见。因此,发射一颗环绕地月L2点的中继星,即可建立地球与月球背面探测器的中继通信链路,从而有效支持月球背面着陆探测任务[2],如图1所示。
2018年5月21日,在西昌卫星发射中心用“长征4号”丙运载火箭成功将探月工程“嫦娥4号”任务“鹊桥”号中继星发射升空。中继星为“嫦娥4号”任务提供中继通信服务[3-4],中继通信分系统是最核心和关键的部分。考虑到深空探测任务的复杂性和中继通信的可靠性,本文就中继通信系统进行了分析,并给出了设计中的难点问题及其解决方案并进行了仿真验证,结果表明方案满足中继通信的要求。
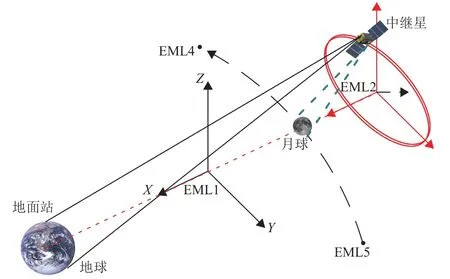
图1 中继星与地球、月球几何关系图Fig.1 The geometric diagram between relay satellite and Earth,Moon
1 中继通信系统组成及功能
“嫦娥4号”中继星的中继通信分系统由对月前向链路、对月返向链路、对地数传链路组成。其中,对月前向链路可完成对“嫦娥4号”的测控指令发送及数据注入;对月返向链路完成接收“嫦娥4号”的载荷和遥测数据回传;对地数传链路可实现将“嫦娥4号”的载荷和遥测数据及中继星自身搭载的科学载荷数据传回地面,中继星中继通信分系统原理如图2所示。
1.1 对月前向链路
对月前向链路由对月UXB(Unified X-band)调制器、X频段20 W固放、前向波导开关、X频段同轴开关及前向双工器组成,可完成对“嫦娥4号”的着陆器和巡视器测控指令发送和数据注入任务。
中继星接收到地面发送的遥控信息,星务分系统将其解调后转发给对月UXB调制器,识别出发往“嫦娥4号”着陆器和巡视器的遥控指令/数据后,分别对其进行校验判断、调制,按照相应频率发送给X频段20 W固放进行信号放大,再通过中继通信天线发往“嫦娥4号”着陆器和巡视器。
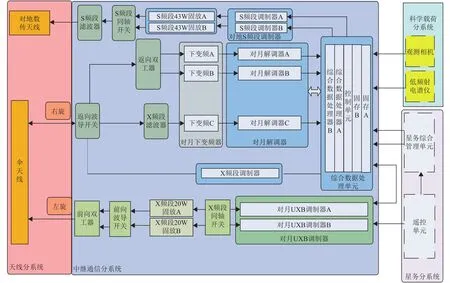
图2 中继星中继通信分系统原理框图Fig.2 Principle block diagram of relay communication subsystem
1.2 对月返向链路
对月返向链路由综合数据处理单元、对月解调器、对月下变频器、返向波导开关、返向双工器及X频段滤波器组成,可完成对“嫦娥4号”的返向数据进行下变频、提取、解调、译码等功能,然后输出数据至综合数据处理单元。
返向链路接收来自“嫦娥4号”着陆器和巡视器的数据,数据分别进入独立的下变频器。下变频器对输入的射频信号进行放大、混频、滤波后输出中频信号,之后再进入到独立的解调器,解调器对数据进行同步、解调、译码等数字处理后,输出统一的数据格式后进入综合数据处理单元。
1.3 对地数传链路
1.3.1 对地S频段数传链路
对地S频段数传链路由综合数据处理单元、S频段调制器、S频段43 W固放、同轴开关及滤波器组成,可实现将着陆器、巡视器的载荷和遥测数据及中继星搭载的科学载荷数据通过S频段链路下传至地面的功能,对地S频段数传链路能够与对月中继通信链路同时工作。
1.3.2 对地X频段数传链路
对地X频段数传链路由综合数据处理单元、X频段调制器、返向波导开关组成,可实现将着陆器、巡视器的载荷和遥测数据及中继星搭载的科学载荷数据通过X频段链路下传至地面的功能。但由于对地X频段数传链路工作时,需要将中继通信天线指向地球,所以无法实现与对月中继通信链路同时工作。
对地S/X频段数传链路中,综合数据处理单元接收来自对月解调器的数据和来自科学载荷的数据及来自星务的中继星自身的遥测数据,对其进行编码、组帧、根据星务指令进行存储,或以不同码速率实时/回放至S或X频段调制器,然后进行调制及放大后下传至地面。
2 中继通信系统方案设计的关键点
2.1 系统频率设计
因中继星对地S频段数传链路,对月X频段中继返向链路,对月X频段中继前向链路,对地S频段测控链路需要同时工作,所以要考虑几个频段同时工作时相互之间的影响。
2.1.1 对月前向及返向中继链路的收发端隔离度设计
因中继前向及返向链路共用一个收发天线,且返向链路的信号衰减大、电平低,前向链路发射的功率大,所以,为了保证前向及返向链路工作正常,需要确保收发两端的隔离度满足要求。
中继通信天线接收端846 XMHz信号电平高于接收端收到发送端720 XMHz信号电平15 dB以上,接收端收到发送端846 XMHz底噪噪声功率谱密度也低于接收端本身底噪噪声功率谱密度20 dB以上,可以保证正常接收。
2.1.2 对中继星测控系统接收链路的干扰抑制设计
由于中继星的对地S频段数传和与S频段测控接收要同时工作,为了保证S频段测控接收正常工作,需要对地S频段数传发送端在S频段测控接收带内信号进行抑制。
设计结果表明,测控天线接收端204 XMHz信号电平高于接收端收到发送端228 XMHz信号电平20 dB以上,接收端收到发送端228 XMHz底噪噪声功率谱密度也低于接收端本身底噪噪声功率谱密度20 dB以上,可以保证正常接收。
经过了地面各个阶段的电磁兼容(Electric Magnetic Compatibility,EMC)试验及整星在轨测试,中继通信分系统的功能和性能正常,验证了设计的正确性,EMC现场测试如图3所示。

图3 EMC试验测试现场图Fig.3 Field diagram of EMC test
2.2 轻量化设计
中继星轨道距离地球超过40万km,距离远、在轨工作寿命要求较长(5年)、重量指标要求苛刻,所以要求中继通信分系统和单机在设计过程中既要保证技术和产品可靠,又必须通过轻量化设计对重量进行严格控制。中继通信分系统采取减重措施如下。
1)中继通信分系统设计时在满足整星功能的同时尽量减少不必要的冗余设计。如:返向链路正常工作时中为2路,主份返向链路进行两器数据的实时传输,故障情况下,1路备份通道进行着陆器和巡视器数据分时传输,减少了1路通道备份的重量。
2)有源单机内部的器件也尽量选用成熟且集成度高的器件或芯片,进行小型化设计。在中继通信分系统的3个下变频器上采用了基于多芯片组件(Multichip Module,MCM)封装技术的新型频率源和小型化电源模块,在保证性能指标先进的前提下,产品高度集成化、体积小、重量轻。
3)中继通信分系统内部单机除高频微波单机外,其余单机均使用了镁合金结构,螺钉也采用了钛螺钉。
4)单机内部的连接器尽量选用了体积小、密度高、重量轻的连接器,微波有源单机内部MCM模块如图4所示。
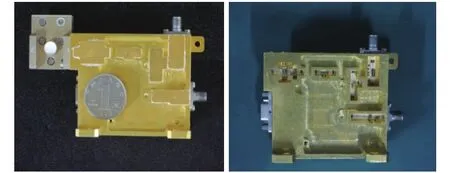
图4 微波有源单机内部MCM模块图Fig.4 MCM module diagram of microwave active equipment
2.3 分系统内部时延设计
中继星在给“嫦娥4号”着陆器和巡视器提供中继通信服务时,必须对接收转发数据的时延进行严格的控制,保障中继通信的时效性。中继通信系统在设计时对上述的对月前向、对月返向、对地数传链路的时延控制措施如下。
1)针对时延极小的无源类单机,如:开关、滤波器、双工器等。此类设备时延只有十几或几十纳秒,在研制过程中,采取多阶段测试,重点关注各个设备在不同阶段测试的时延的稳定性和一致性。
2)针对时延较小的有源类单机,如:固放、下变频器、调制器等。此类设备时延为几十或几百纳秒,在研制过程中,也是通过多阶段测试,确保时延的稳定性和一致性。
3)针对时延较大的数字类单机,如:对月UXB调制器、综合数据处理单元、解调器等。此类设备需对数据进行操作和处理,时延为几百毫秒,几秒甚至几十秒,整个系统时延主要体现在此类单机。在研制过程中,针对此类单机,通过提高载波锁定算法效率,优化帧同步算法策略,降低全部入锁时间来减小时延。在产品研制初期,重点是对单机软件状态进行梳理,保证软件语言中逻辑清晰、结构紧凑、减少不必要的处理过程。软件完成后加强软件用例测试,确保测得的时延覆盖了各种工况和边界条件。表1~3为中继通信分系统各个链路时延具体测试值。
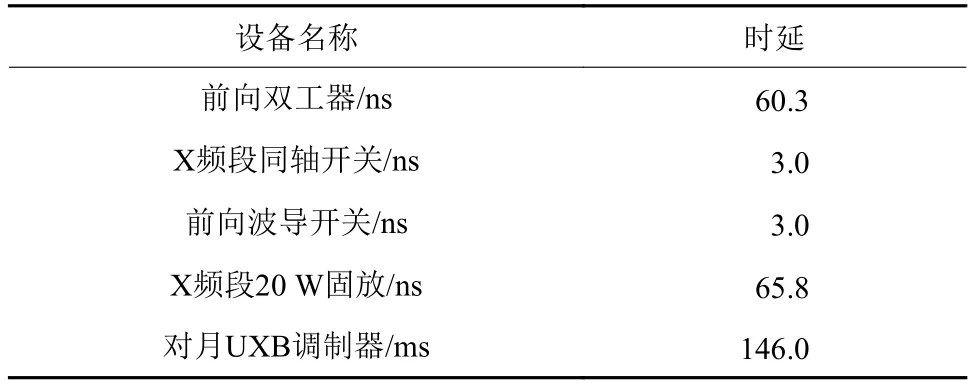
表1 中继通信分系统前向链路时延Table 1 Forward link time delay in relay communication subsystem
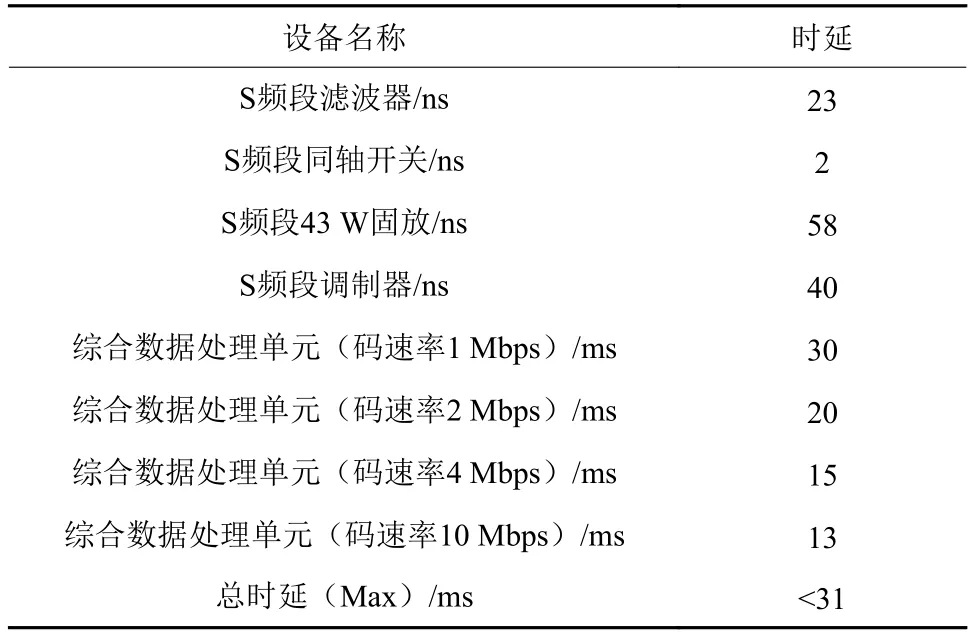
表2 中继通信分系统对地链路时延Table 2 The ground link time delay of communication subsystem

表3 中继通信分系统返向链路时延Table 3 Backward link time delay in relay communication subsystem
2.4 环境适应性设计
中继星是首次在地月L2平动点轨道运行的通信卫星,需要对空间环境进行适应性分析。根据“嫦娥4号”空间环境的分析[3],从辐射环境来看,辐射水平与“嫦娥3号”相当,针对空间辐射环境主要是采取有效的抗单粒子设计措施,确保设备在轨运行的可靠性。
中继通信分系统中综合数据处理单元,对月解调器等数字类单机中采用了大规模集成电路器件FPGA(Field-Programmable Gate Array)。基于SRAM(Static Random Access Memory)型的FPGA采用了“三模冗余(Triple Modular Redundancy,TMR)+ 定时刷新”的抗单粒子翻转措施。每隔一定时间,定时刷新控制器(Actel FPGA)将配置和刷新PROM(Programmable Red-Only Memory)中的bit文件加载至相应的FPGA中,从而实现对FPGA中逻辑器件的刷新处理。
由于中继星在轨要经历较长时间的阴影,20 W固态放大器和43 W固态放大器的存储温度会比较低,最低超过零下50 ℃,在研制过程中需要考虑对低温存储环境的适应性问题,通过专项试验确保产品能够经受低温环境的考验。
3 中继通信系统设计的难点及解决方案
3.1 中继星通信系统设计的难点
通过对中继星任务的分析,中继通信分系统的技术难点集中在对月返向链路,主要存在以下两方面的技术挑战。
1)解调灵敏度要求高
由于“嫦娥4号”着陆器和巡视器自身天线增益、固放功率等的限制,发射端有效全向辐射功率(Effective Isotropic Radiated Power,EIRP)值很低,再通过7万多km的空间衰减后,信号电平值更低。且中继星由于重量、体积、可靠性等要求,接收天线增益有限,返向链路接收端所接收的信号电平很低,最低约为-136 dBm,接近电路器件的工作极限,对电路、算法的选择提出了较高要求。
针对高灵敏度接收要求,在器件选型方面,要选用极低噪声系数器件,尽量减少额外噪声。在电路设计中,处在接收前端部分使用独立的盒体和电源纹波系数极低的电源供电,后端数字处理部分采用信号识别和动态滤波的办法。信号识别采用平方频偏估计和FFT(Fast Fourier Transformation)结合算法,在识别中心频率后,根据相应的码速率动态调整滤波器(不同码速率下设置不同带宽的滤波器)进行匹配滤波,使解调性能最佳。
表4为中继通信分系统返向链路针对不同码速率的接收能力测试情况,可以看出链路裕量均大于3 dB以上,中继星在轨测试与地面测试性能基本一致。

表4 中继通信分系统返向接收能力Table 4 Backward receiving capability of relay communication subsystem
2)大频偏接收范围、多种码速率、高多普勒动态扫描下连续解调
“嫦娥4号”着陆器和巡视器回传的数据有高低7种码速率,且还需考虑环月、落月和月面工作等多种工况下的空间多普勒带来的影响,需要适应返向接收频点扫描的工况,此时,仍然要求返向链路进行连续接收处理,具体要求如表5所示。

表5 中继通信分系统返向适应扫描要求Table 5 Backward scanning requirements for relay communication subsystem
3.2 中继星通信系统设计难点解决方案
针对大频偏接收范围、多种码速率、高多普勒动态扫描下连续解调,设计了相适应的捕获与跟踪算法。
1)搭建仿真模型图
利用Matlab Simulink建立了模型图,模型图由调制器、通道、解调器构成。调制器中包括伪随机序列的数据源,映射变换、正交调制模块;解调器中包括时钟环的搭建模型和通用载波环的搭建模型。系统仿真框图如图5所示。
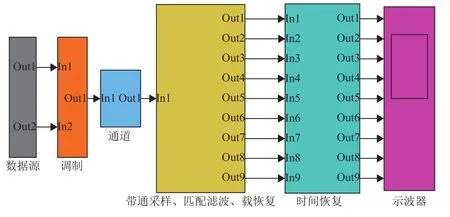
图5 并行解调的Simulink模型Fig.5 Simulink model for parallel demodulation diagram
由于数据源使用码型不同、速率相同的伪随机序列作为数据信息;将数据经过电平转换、低通滤波器,变成连续的波形后,送入调制模块,调制后变成调制信号发送出去。信号在传输过程中会受到噪声的影响,通道模型为信号添加高斯白噪声信号(星地传输为高斯白噪声信道),如图6所示。
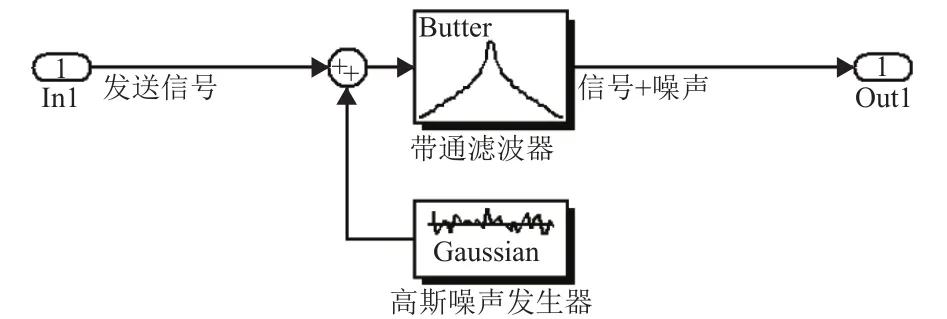
图6 通道模型Fig.6 Channel model diagram
接收到的信号与本地自由振荡器的输出进行混频滤波后,使用比特环提供的时钟进行采样、量化,如图7所示。根据比特环的定时误差检测算法,比特环的仿真模型如图8所示。
经中频采样得到的I,Q两路数据,在进入载波环之前由于相差与频差尚未消除,还不是最终的解调数据。载波环的功能就是利用I,Q两路数据的频差、相差信息,经过一系列的操作来消除频差和相差并得到正确的解调数据。具体而言,两路数据首先进行旋转变换,然后通过差频检测提取出一个误差信号,此信号再经过环路滤波器来提供正弦、余弦查找表的地址。这样循环往复,带有频差的数据最终被还原为真实的发送数据。载波环及载波锁定的模型图如图9~10所示。

图7 正交变换、采样、量化模型图Fig.7 Orthogonal transform、sampling、quantization model diagram
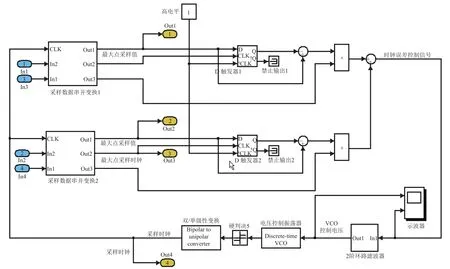
图8 比特环模型图Fig.8 Bit loop model diagram
2)仿真结果
为便于Simulink对实际系统进行仿真,仿真载波与真实载波频率相同,均为70 MHz,码速率为1.4 Kbps,信噪比为3 dB,采样时钟为16 MHz;载波变化率使用线性模型,变化率为150 Hz/s,时钟锁定仿真结果如图11所示,载波锁定如图12所示。
图13是大信噪比下开环时鉴频器和鉴相器的输出曲线,可以看出来鉴频器的输出是线性变化的,而鉴相器的输出是周期折叠的,并且鉴相器输出的折叠周期随着频率的增加而变短。
闭环测试以后,图14给出了时间从0~10 s内环路跟踪的输出,仿真时信噪比为3 dB。从仿真分析结果可知,在环路跟踪初始阶段,二阶锁频环路(Frequency Locked Loop,FLL)占据主导作用,然后FLL趋于平缓,三阶锁相环(Phase Locked Loop,PLL)占据主导地位。图14(b)中给出了稳定后环路输出与实际载波变化值的对比,图中环路输出的值能够跟上载波扫描的变化,但是由于噪声的影响,环路存在着一定的跟踪误差。

图9 载波环的模型图Fig.9 Carrier loop model diagram

图10 载波锁定指示模型Fig.10 Carrier lock indicator model diagram
图15中是多普勒变化率为150 Hz/s,信噪比为3 dB时载波环跟踪出来的星座图。从图15仿真结果可以看出,二阶锁频环加三阶锁相环可以跟踪150 Hz/s的载波扫描速率。
为了保证返向链路的接收性能,除对月解调器在调试及环境试验过程中测试高低温下的返向扫描捕获情况,中继通信分系统还增加了整个返向链路的高低温老炼试验,性能正常,并且在整星下也通过了环境试验考核,两器一星中继通信链路测试,入轨后还与地面的着陆器和巡视器进行了中继通信链路验证,结果表明中继通信返向链路性能稳定,该难点问题得到有效解决。

图11 时钟锁定示意图Fig.11 Clock lock simulation diagram

图13 开环鉴频器和鉴相器输出图Fig.13 Output diagram of open-loop frequency discriminator and phase discriminator

图14 载波环环路滤波器输出Fig.14 Output diagram of carrier loop filter

图15 载波跟踪前后BPSK星座图Fig.15 BPSK constellation before and after carrier tracking
4 结 论
中继通信分系统是中继星实现中继通信任务的核心分系统。该分系统经历方案论证、详细设计、生产、测试、环境试验、大系统联试以及最终的在轨飞行测试,各项功能和性能得到了充分验证,技术指标能够满足任务要求,具备了为“嫦娥4号”着陆器和巡视器提供中继通信支持的能力。
猜你喜欢
新疆钢铁(2021年1期)2021-10-14
计算机测量与控制(2021年8期)2021-08-23
航天器工程(2019年4期)2019-11-11
航天工业管理(2019年11期)2019-04-20
载人航天(2019年1期)2019-03-07
伙伴(2019年12期)2019-01-17
北京航空航天大学学报(2017年4期)2017-11-23
能源(2017年9期)2017-10-18
航空模型(2016年5期)2016-07-25
中学科技(2015年7期)2015-07-03