偏导射流伺服阀建模及动态特性研究
2018-04-11 07:48王书铭左哲清延皓许玲玲董立静
兵工学报 2018年3期
王书铭, 左哲清, 延皓, 许玲玲, 董立静
(1.北京交通大学 机械与电子控制工程学院, 北京 100044;2.北京精密机电控制设备研究所, 北京 100076)
0 引言
电液伺服阀是伺服控制系统的核心部件[1],偏导射流伺服阀是电液伺服阀的一种,一般由力矩马达、偏导射流前置级和功率级液压放大器组成[2],是从射流管伺服阀发展演变而来的。偏导射流伺服阀具有抗污染能力强、稳定可靠等特点[3],在军工和民用工业领域均有广泛的应用。
目前,国内外针对喷嘴挡板伺服阀已有相对成熟的理论[4],但对于偏导射流伺服阀的理论研究较少。王传礼等[5]提出了偏导线性化流量方程,并利用构建的模型对动态特性进行了仿真,验证了动态数学模型的准确性,该成果对偏转射流伺服阀的前置级特性研究提供了很好的借鉴。訚耀保等[6]推导得出了接收口、供油压力等因素对压力特性的影响规律。杨月花[7]通过数值仿真得出了不同形状前置级的流场分布,同时通过可视化试验对其进行了验证。江林秋[8]用一种基于湍流理论的新方法对偏导射流前置级进行了分析,并对其结构参数进行了优化。Dhinesh等[9]采用双向压电晶体控制偏导板位移的方式改善了偏导射流伺服阀的性能。此外,Zhu等[10]基于大磁致伸缩材料设计了一种具有高频响的新偏导射流伺服阀。Shang等[2]建立了偏导射流伺服阀前置级的3D模型,分析了其压力特性并优化了其关键参数。蒋大伟等[11]结合专业网格划分软件ICEM与专业流体仿真软件Fluent,构建了偏转板射流伺服阀的前置级流场分析模型,分析了其压力特性。刘增光等[12-13]运用计算流体动力学(CFD)软件对某偏转板射流阀内部不同阀口参数组合下的压力特性进行了数值计算和分析,还利用Fluent 软件仿真分析了喷嘴宽度对射流效率的影响。宁月光[14]利用CFD和AMESim软件建立了偏导射流伺服阀联合仿真模型。延皓等[15]和Yan等[16]提出了基于矩形喷口和接收器的前置级节流模型,推导得出了液动力简化计算公式。
综上所述,目前在偏导射流伺服阀研究方面有很多借助流场仿真分析软件,它们主要是对其前置级流场分布、压力特性、动态特性方面进行研究。这些研究大部分并不以偏导射流液压放大器内部结构参数为基础,从而无法得知这些内部结构参数与整阀动态特性的关系,并且模型没有考虑前置级液动力,这显然会影响模型的准确性。鉴于目前缺少基于偏导射流液压放大器内部结构参数并考虑前置级液动力的整阀数学模型,而且这些结构参数对整阀动态特性影响方面的研究也存在不足,本文以某型偏导射流力反馈两级伺服阀为研究对象,建立了包括力矩马达、偏导射流液压放大器、功率级滑阀在内的完整数学模型;根据动量定理,基于偏导射流液压放大器中射流口和接收口之间的流量关系,推导得出了液动力的近似计算公式;对偏导射流伺服阀频率特性进行了研究,对比了不同偏导射流液压放大器结构参数对整阀频率特性的影响;进行了针对性试验,验证了模型的有效性和准确性。
1 偏导射流伺服阀数学模型建立
1.1 基本描述
偏导射流伺服阀由力矩马达、偏导射流液压放大器(偏导板和射流盘)、滑阀副组成,结构如图1所示。
偏导射流伺服阀的核心部分为射流盘和偏导板,二者的位置关系如图2所示。由图2可见,偏导板在射流盘中沿x轴方向的运动为主要偏移方向。工作时,它存在两次液体能量形式的转换,射流口将液压压力能转化为动能,两个接收口将动能转化为驱动阀芯所需的压力能[17]。
1.2 偏导射流伺服阀数学模型
下面逐一分析偏导射流伺服阀各部分的模型,进而形成整阀模型。
1.2.1力矩马达模型
力矩马达的输入量为控制线圈中的信号电流,输出量为衔铁的转角。根据磁路相关原理,电磁力矩的简化表达式[18]为
Td=Kmθ+KtΔI,
(1)
式中:Td为电磁力矩;Km为磁弹簧刚度(N·m/rad);θ为衔铁转角(rad);Kt为力矩马达的中位力矩常数(N·m/A);ΔI为控制线圈中的信号电流(A)。
衔铁组件为伺服阀的反馈机构,其偏转前后反馈杆的位置如图3所示。图3中:a1为衔铁臂长;r为偏导板中心到衔铁组件旋转中心的距离;b1为偏导板中心到反馈小球的距离;xv为阀芯位移。
在偏导射流伺服阀工作时,衔铁组件受电磁力矩、惯性力矩、阻尼力矩、弹簧力矩以及负载力矩的共同作用,其运动平衡方程[18]为
(2)
式中:Ja为衔铁组件的转动惯量(kg·m2);t为时间;Ba为衔铁组件的黏阻系数(kg·s/m);Ka为弹簧管的刚度(N·m/rad);Tl为衔铁组件总负载力矩(N·m)。
又由(1)式可知:
(3)
总负载力矩Tl由射流盘处液流对偏导板的作用力产生的负载力矩Tl1和滑阀处反馈杆变形产生的负载力矩Tl2组成[19],其中Tl1=Fir,Fi为前置级液动力。由图3可得
Tl2=(r+b1)2Kfθ+Kf(r+b1)xv,
(4)
式中:Kf为反馈杆刚度。
力矩马达纯刚度为
Kan=Ka-Km,
(5)
则力矩马达摆角θ与电流ΔI的关系可表示为
(6)
(7)
(8)
式中:ωmf为力矩马达固有频率;ξmf为力矩马达阻尼比;s为传递函数中的拉普拉斯变换。
如图3所示,力矩马达摆角θ导致偏导板产生位移,偏导板的位移xi可表示为
xi=rθ.
(9)
1.2.2偏导射流液压放大器模型
图4为典型的偏导射流液压放大级工作原理图,图4中在供油与偏导射流液压放大器之间设置了供油阻尼孔,主要是为了降低偏导射流液压放大器入口压力、提高其稳定性,可以视实际需求确定其孔径。另外,在偏导射流液压放大器和回油之间也设置了回油阻尼孔,通过设置其孔径可以适当提高偏导射流液压放大器工作区的背压,在一定程度上提高其工作稳定性。
图4中:ps为供油压力;ps1为射流盘入口压力;prp为射流盘工作区背压;pk和vk分别为射流盘射流口出口的油液压力及流速;ph和vh分别为射流盘接收口入口的油液压力及油液喷射到入口前的流速;pc1和pc2分别为两个接收腔(控制腔)的压力;pr为回油压力;a为射流盘射流口宽度;c为偏导板喷射口宽度。当偏导板处于中位且负载通路截止时,

(10)

(11)
式中:kp和kv分别为压力损失系数和速度损失系数。
实际设计中,为了尽量避免压力损失,从射流盘接收口入口到两接收腔的油路通径较大,因此可以近似认为
ph=pc1=pc2.
(12)
当负载通路截止时,射流盘两个接收口都充满了油液。以一个接收口为研究对象,在油路上取两个剖面A和A′,如图5所示,其中A剖面为油液喷射到接收口的截止平面,A′剖面为油液喷射到接收口之前的剖面。两个剖面之间的流体可以近似为具有固定边界的控制体,设A剖面的油液压力及流速分别为ph和v0,A′剖面的油液压力及流速分别为p0和vh,液压油密度为ρ,则根据伯努利方程有:
(13)
显然,截止剖面A上的流速v0可以近似为0,同时,A′剖面周围通过回油孔连接回油区,考虑回油背压较小时,其压力p0也可以近似为0,则(13)式可简化为
(14)
设流过供油阻尼孔的流量为Q1,流过射流盘射流口的流量为Q2,则有:
Q1=Q2,
(15)
(16)
(17)
式中:C1、A1分别为供油阻尼孔的流量系数和过流面积;C2、A2分别为射流口的流量系数和过流面积。
如图6所示,设供油阻尼孔直径为d,射流盘厚度为b,则
(18)
A2=ab,
(19)
(20)
联立以上各式,可得
(21)
(22)
在以上分析基础上,下面给出描述偏导射流液压放大器性能的3个重要系数,随后对偏导射流液压放大器液动力进行分析。
1)偏导射流的压力放大系数kpi
压力放大系数由两接收腔(控制腔)压力pc1和pc2及偏导板位移xi决定,如图4所示,可以近似认为
(23)
(24)
则
(25)
2)偏导射流的流量放大系数kqi
如图4所示,流速及过流面积决定了两接收腔(控制腔)的流量Qc1和Qc2,因此可近似认为
(26)
(27)
则
(28)
3)偏导射流的压力流量放大系数kci
压力流量放大系数为压力放大系数和流量放大系数的比值,因此
(29)
偏导射流液压放大器的流量—压力特性可以反映偏导射流液压放大器负载流量Qli、负载压差pli、偏导位移xi三者之间的关系,根据以上各式,可得其线性化方程[20]为
Qli=Kqixi-kcipli.
(30)
4)偏导射流液压放大器液动力分析
图7为偏导射流液压放大器液动力分析图,对于偏导射流液压放大器来说,只有沿偏导板运动方向的液动力会对力矩马达形成力矩反馈[21],因此本文只对图中x方向的液动力进行分析。
图7中:α和β分别为两接收口与射流盘中线的夹角;Q3、Q4、Q5及Q6分别为接收腔1的流量、接收腔2的流量、接收腔1侧的泄漏流量、接收腔2侧的泄漏流量;v3、v4、v5、v6及v分别为接收腔1流速、接收腔2流速、接收腔1侧的泄漏流速、接收腔2侧的泄漏流速、射流盘射流口流速。如图7所示,当偏导板沿x轴方向偏转位移xi时,Q3、Q4、Q5及Q6共4部分液流流速和流向的不同会对偏导板产生x轴方向的液动力,4股液流对偏导板产生的液动力(向右为x轴正向,即力的正方向)分别为
F3=-ρQ3v3sinα,
(31)
F4=-ρQ4v4sinβ,
(32)
F5=-ρQ5v5,
(33)
F6=-ρQ6v6,
(34)
式中:F3、F4、F5、F6分别表示图7中Q3、Q4、Q5、Q64部分液流对偏导板沿x轴方向的液动力。又知:
(35)
(36)

则
(37)
(38)
结合上文的偏导射流液压放大器射流流量分析,可以近似认为:
(39)
(40)
偏导板受到的x轴方向前置级液动力Fi为
Fi=F3+F4+F5+F6.
(41)
综合(33)式、(34)式和(37)式~(41)式可以看出,在机械设计参数一定的情况下,偏导板所受的x轴方向前置级液动力与偏导板位移量及阀芯速度有关。
进一步将(31)式~(34)式和(39)式~(41)式进行综合,得

(42)
由于v5和v6符号相反,xi很小,(42)式后两项可以忽略,则(42)式进一步简化为
Fi=-ρQ3(v3sinα-v5)-ρQ4(v4sinβ+v6).
(43)
当阀芯静止时Q3=Q4=0,偏导板所受的x轴方向前置级液动力近似为0;当阀芯运动时,仔细分析液体流动,由于液流过流面积相对很大,沿x轴方向的流速v5和v6较小,可以将前置级液动力公式进一步简化为
(44)
1.2.3偏导射流伺服阀功率级液压放大器模型
功率级液压放大器中阀芯力平衡方程[18]为
(45)
式中:pli为阀芯两端压差;mv为滑阀质量;Bv为滑阀阀芯粘性阻尼系数;Fs为滑阀稳态液动力。
当压力一定时,滑阀稳态液动力为关于位移量的线性函数,记为Fs=Kvxv[22],代入(45)式可得
(46)
1.2.4整阀模型
根据(6)式、(9)式、(30)式、(44)式、(46)式,得到偏导射流两级伺服阀的方框图如图8所示。
图8中:Cd为滑阀节流边流量系数;w为滑阀面积梯度;Δp为滑阀节流边压差;Q为滑阀输出流量。
如果忽略由阀芯运动构成的压力反馈回路,则图8可进一步简化为图9.
根据图9,得到偏导射流两级伺服阀的闭环传递函数为

(47)
2 模型仿真与频率分析
以某型偏导射流伺服阀为研究对象,其具体设计参数见表1.
将某偏导射流伺服阀的设计参数代入仿真模型,给定25%额定幅值的信号,绘制空载流量与输入电流信号的伯德图,仿真结果如图10所示。由图10可以看出,该伺服阀-3 dB幅频为32.8 Hz,-45°相频为21.9 Hz.
2.1 射流口尺寸对整阀动态特性的影响
偏导射流伺服阀射流口宽度和射流盘厚度决定了射流口的过流面积[23],为了分析不同射流口尺寸对整阀动态特性的影响,在上述仿真基础上进行以下两方面仿真分析:
1)固定射流盘厚度b为0.6 mm,取射流口宽度a分别为0.14 mm、0.16 mm和0.18 mm;
2)固定射流口宽度a为0.16 mm,取射流盘厚度b分别为0.55 mm、0.60 mm、0.65 mm.
仿真结果分别如图11和图12所示。从仿真结果可以看出:
1)当射流盘厚度一定、射流口宽度在较小范围内变化时,射流口宽度越大,整阀频率的特性越差;

表1 某型偏导射流伺服阀设计参数Tab.1 Design parameters of jet deflector servo valve
2)当射流口宽度一定、射流盘厚度在较小范围内变化时,射流盘厚度越大,整阀频率特性越好。
偏导板喷射口宽度c是偏导射流液压放大器中的关键尺寸,它也会影响整阀的动态特性,图13为喷射口宽度c分别为0.13 mm、0.15 mm、0.17 mm时的仿真结果。从图13中可以看出,喷射口宽度越小,压力增益越大,整阀的频率特性越好。
2.2 非线性因素对滑阀不同开口量时的整阀动态影响分析
在偏导射流伺服阀中存在很多非线性因素,这些非线性因素对整阀特性会产生一定的影响。与喷嘴挡板伺服阀类似,偏导射流伺服阀中比较典型的非线性因素包括力矩马达磁滞、滑阀粘性阻尼、滑阀摩擦力等,这几类非线性因素对整阀特性的影响已有比较深入的研究,不再赘述。下面主要对偏导射流液压放大器中分流劈尖宽度u及偏导板与射流盘间隙δ导致前置级流量增益(即偏导射流的压力放大系数kqi)非线性,进而对整阀动态特性的影响进行简要分析。图14所示为分流劈尖宽度u及偏导板与射流盘间隙δ与喷射口等的相对关系。
由图14可知,当偏导板位移为xi时,由于分流劈尖宽度u及偏导板与射流盘间隙δ的存在,导致射入接收口的流体流速vh并不线性,随着xi的增大,液流向间隙泄漏得越来越多(Q5),进而导致Q3没有线性增大。于是,结合某型偏导射流伺服阀的历史试验数据,当偏导板位移为xi时,对(28)式进行粗略修正如下:

(48)
式中:kqir为修正后的前置级流量增益;ximax为偏导板最大位移。
将表1中的设计参数代入(48)式,得到阀芯分别为25%、40%及100%开口量时的kqir值,代入仿真模型后即可得到如图15所示的仿真结果。从图15中可以看出,由于前置级流量增益非线性,随着滑阀开口量的增大,整阀频响逐渐降低。
3 试验研究
3.1 偏导射流前置级测试
按照第2节给出的某型偏导射流伺服阀设计参数,根据(21)式和(25)式计算得:ph≈5.9 MPa,kpi≈158 MPa/mm. 为了验证这一计算结果的准确性,进一步对该偏导射流伺服阀进行测试,主要测试项目为整阀装配状态下偏导射流液压放大器的中位压力ph和压力放大系数kpi.
在供油压力21 MPa下,选取10台产品进行测试,将10组实测数据取平均如表2所示。

表2 偏导射流液压放大器实测数据均值Tab.2 Measured data of jet deflector amplifier
从表2中可以看出,在21 MPa供油压力下,10台产品中位压力均值为5.5 MPa,与(21)式的计算结果基本吻合。此外,当被测产品衔铁位移测点与力矩马达旋转中心的距离为21 mm、射流盘与力矩马达旋转中心的距离r为12 mm时,结合表2中的数据计算得出压力放大系数均值约为149 MPa/mm,与(25)式的计算结果基本吻合。
3.2 偏导射流伺服阀动态测试
为了验证模型及仿真结果的准确性,在相同输入条件下,进一步对上文中的10台偏导射流伺服阀产品进行动态性能测试。
动态测试系统原理如图16所示。系统中活塞杆速度传感器的输出即为伺服阀流量输出,它和伺服阀控制电流同时输入频率特性分析仪,则伺服阀输出流量的动态响应可以直接从频率特性分析仪得出。由于伺服阀有零偏,零偏输出的流量经动态缸积分为活塞位移。如果没有位置反馈,则会使活塞渐渐地漂向一端而无法进行测试,因此系统中设置了位移传感器、建立了位置反馈以抑止活塞漂移。为使反馈只对活塞漂移起作用,保证反馈回路对于测试频率近似开环,回路中设置了低通滤波器,用于滤除测试频率信号。
按照规范要求,测试时输入25%额定幅值的控制信号,以5 Hz作为起始测试频率,逐渐增大信号频率值至40 Hz,频率特性分析仪采集到各个频率点的数据后,通过软件处理得到伺服阀的幅频和相频特性曲线,通过曲线可以读出产品的-3 dB幅频和-45°相频。
10台产品的实测数据如表3所示。从表3可以看出,实测-3 dB幅频范围为31.20~33.00 Hz,实测-45°相频范围为20.00~21.20 Hz. 进一步对10组数据取平均,-3 dB幅频为32.15 Hz, -45°相频为20.74 Hz,与图10中仿真结果(32.8 Hz、21.9 Hz)基本吻合。图17为测试现场和测试设备照片,其中1台产品的测试结果与仿真结果的对比如图18所示。
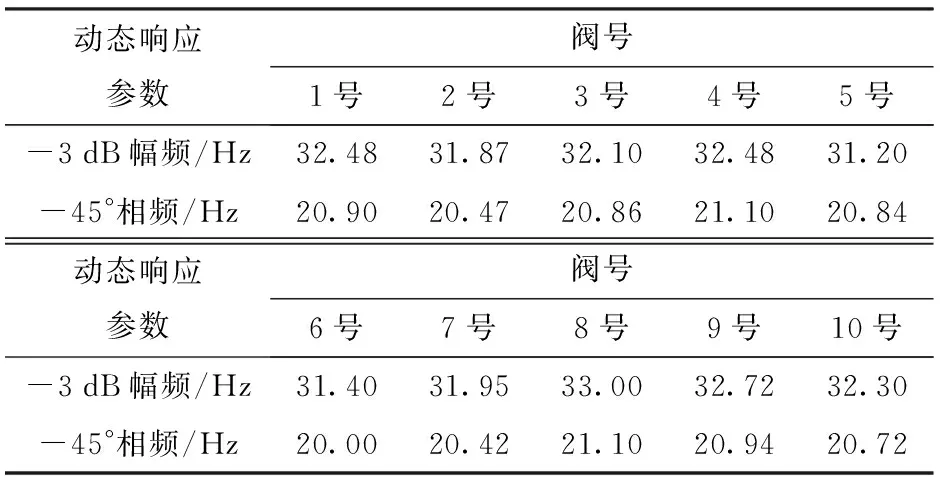
表3 实测动态数据Tab.2 Measured data of dynamic characteristics
4 结论
本文建立了包含偏导射流液压放大器内部结构参数的解析数学模型,提出了一种偏导射流液压放大器的液动力计算方法,研究了偏导射流液压放大器内部结构参数对整阀动态特性的影响、偏导射流前置级流量增益的非线性变化规律及其对整阀动态特性的影响,得出以下结论:
1)偏导射流伺服阀数学模型能够准确描述产品的特性,按照此模型开展的仿真分析可以指导实际产品结构参数设计。
2)当阀芯静止时,偏导射流液压放大器液动力可忽略不计;当阀芯运动时,偏导射流液压放大器液动力随阀芯运动速度的增大而增大。
3)射流盘厚度、射流口宽度、偏导板喷射口宽度均会对整阀动态特性产生影响,适当减小射流口宽度、增大射流盘厚度、减小喷射口宽度,有利于整阀动态特性的提高。
4)偏导射流前置级流量增益非线性与射流盘分流劈尖宽度有关,该非线性导致了整阀动态响应随滑阀开口的增大而降低。
参考文献(References)
[1]康硕,延皓,李长春. 偏转射流式伺服阀研究综述[J].北京交通大学学报, 2017,41(1):130-139.
KANG Shuo,YAN Hao,LI Chang-chun. Research review of the deflector jet servo valve [J]. Journal of Beijing Jiaotong University, 2017,41(1):130-139. (in Chinese)
[2]Shang Y X, Zhang X S, Hu C W, et al. Optimal design for amplifier of jet deflector servo valve[J]. Machine Tool & Hydraulics: Hydromechatronics Engineering, 2015, 43 (6): 11-15, 26.
[3]訚耀保,张鹏,岑斌.偏转板射流伺服阀前置级流场分析[J].中国工程机械学报,2015,13(1):1-7.
YIN Yao-bao,ZHANG Peng,CEN Bin. Pre-stage flow field analysis on deflector jet servo valves[J]. Chinese Journal of Construction Machinery,2015,13(1):1-7. (in Chinese)
[4]刘志会,王少华,曹伟.偏转板射流伺服阀的射流级优化设计方法[J].液压气动与密封,2015(9):19-21.
LIU Zhi-hui,WANG Shao-hua,CAO Wei. Optimistic design method of the jet stage for deflector jet servo valve[J]. Hydraulics Pneumatics & Seals,2015(9):19-21. (in Chinese)
[5]王传礼,丁凡,李其朋,等.射流盘伺服阀控电液位置系统的动态特性[J].重庆大学学报,2003,26(11):11-15.
WANG Chuan-li, DING Fan, LI Qi-peng, et al. Dynamic characteristics of electro-hydraulic position system controlled by jet-pan servovalve[J].Journal of Chongqing University,2003,26(11):11-15. (in Chinese)
[6]訚耀保,张鹏,张阳.偏转板伺服阀压力特性研究[J].流体传动与控制,2014(4):10-15.
YIN Yao-bao, ZHANG Peng, ZHANG Yang. Analysis of the pressure characteristics of deflector jet servo valve[J]. Fluid Power Transmission & Control,2014(4):10-15.(in Chinese)
[7]杨月花.伺服阀前置级射流流场分析及实验研究[D].哈尔滨:哈尔滨工业大学, 2006.
YANG Yue-hua.Analysis and experimental research of prestage jet flow field in hydraulic servo valve[D].Harbin:Harbin Institute of Technology,2006. (in Chinese)
[8]江林秋.新型偏转板射流液压伺服阀的设计与研究[D].南京:东南大学,2013.
JIANG Lin-qiu. Design and research on a new type of deflection plate jet servo valve[D].Nanjing:Southeast University,2013. (in Chinese)
[9]Dhinesh K S, Andrew R P, Christopher R B, et al. Modelling and experimental validation of a novel piezohydraulic servovalve[C]∥the ASME 2011 Dynamic Systems and Control Conference. Arlington, VA, US: ASME, 2011.
[10]Zhu Y C, Li Y S. Development of a deflector-jet electrohydraulic servo valve using a giant magnetostrictive material[J].Smart Materials and Structures,2014,23(11):1-19.
[11]蒋大伟,许明理. 基于Fluent 的偏转板射流伺服阀的前置级仿真[J].液压与气动,2016(4):48-53.
JIANG Da-wei,XU Ming-li.Simulation based on Fluent for pre-stage of deflector jet servo valve[J]. Chinese Hydraulics & Pneumatics,2016(4):48-53.(in Chinese)
[12]刘增光,杨国来,岳大灵,等.偏转板射流阀压力特性数值模拟分析[J].液压与气动,2016(2):76-79.
LIU Zeng-guang,YANG Guo-lai,YUE Da-ling, et al. Numerical simulation of pressure characteristics of deflector jet valve[J]. Chinese Hydraulics & Pneumatics, 2016(2):76-79.(in Chinese)
[13]刘增光,岳大灵,杨桢毅,等. 喷嘴宽度对偏转板射流阀射流效率影响的仿真分析[J].液压与气动,2016 (10): 27- 32.
LIU Zeng-guang,YUE Da-ling,YANG Zhen-yi, et al. Simulation analysis of the influence of nozzle width on the jet efficiency of deflector jet valve[J]. Chinese Hydraulics & Pneumatics, 2016(10):27-32.(in Chinese)
[14]宁月光.偏转板射流伺服阀的多软件联合仿真[J].液压气动与密封,2015(7):41-43.
NING Yue-guang. Multi-software integrated simulation on servo valve with deflector jet[J]. Hydraulics Pneumatics & Seals,2015(7):41-43.(in Chinese)
[15]延皓,康硕,王凤聚,等.偏转板射流式伺服阀前置级液动力计算方法研究[J] .兵工学报,2016,37(7):1258-1265.
YAN Hao,KANG Shuo,WANG Feng-ju, et al. Research on the calculation methods of fluid force in pilot stage of jet deflector servo valve[J].Acta Armamentarii, 2016,37(7):1258-1265.(in Chinese)
[16]Yan H, Wang F J, Li C C, et al. Research on the jet characteristics of the deflector-jet mechanism of the servo valve[J]. Chinese Physics B, 2017,26(4):1-9.
[17]冀宏,魏列江,方群,等.射流管伺服阀射流管放大器的流场解析[J].机床与液压,2008,36(10):119-121.
JI Hong,WEI Lie-jiang,FANG Qun, et al. Investigation to the flow of the jet-pipe amplifier in a servovalve[J]. Machine Tool & Hydraulics,2008,36(10):119-121.(in Chinese)
[18]李洪人.液压控制系统[M].北京:国防工业出版社,1988:50-107.
LI Hong-ren. Hydraulic control system[M]. Beijing:National Defense Industry Press,1988:50-107.(in Chinese)
[19]PHAM Xuan-hong-son, Chen T F. Mathematical model of steady state operation in jet pipe electro-hydraulic servo valve[J]. Journal of Donghua University,2013,30(4):269-275.
[20]李如平,聂松林,易孟林,等.基于CFD的不同工作介质下射流管伺服阀流场特性仿真研究[J].机床与液压,2011,39(3):10-12,29.
LI Ru-ping,NIE Song-lin,YI Meng-lin,et al.Flow characteristics simulation of jet pipe servo valve working in different medium based on CFD[J].Machine Tool & Hydraulics,2011,39(3):10-12,29.(in Chinese)
[21]朱海军.单级射流偏转板伺服阀失效保护及仿真建模[J].液压气动与密封,2015 (11):27-29.
ZHU Hai-jun.Simulation-modeling and fail-safe of single-stage deflector servo valve[J]. Hydraulics Pneumatics & Seals,2015(11):27-29.(in Chinese)
[22]马小良.偏导射流电液伺服阀工程化建模及仿真研究[J].液压与气动,2015(3):83-85,89.
MA Xiao-liang.Model and simulation for deflector jet electrohydraulic servovalve[J]. Chinese Hydraulics & Pneumatics,2015 (3): 83-85,89.(in Chinese)
[23]刘增光,杨国来,岳大灵,等. 进出油阻尼孔对偏转板射流阀射流流场的影响[J].机床与液压, 2017,45(5):133-138.
LIU Zeng-guang, YANG Guo-lai, YUE Da-ling,et al.Influence of the orifice on the jet flow field of deflector jet valve[J]. Machine Tool & Hydraulics, 2017,45(5):133-138.(in Chinese)
猜你喜欢
天津大学学报(自然科学与工程技术版)(2022年1期)2022-11-29
舰船科学技术(2022年11期)2022-07-15
煤气与热力(2022年4期)2022-05-23
兵器装备工程学报(2021年10期)2021-11-08
交通科技与管理(2021年19期)2021-09-10
科技资讯(2021年33期)2021-01-15
锻造与冲压(2020年5期)2020-03-18
中国美容医学(2017年7期)2018-02-02
科学与财富(2017年12期)2017-05-16
北京航空航天大学学报(2017年11期)2017-04-23