
基于LabVIEW的自动焊接机焊接脚检测方法
2018-04-10 06:16汪成龙黄余凤陈铭泉林浩斌陈泽涛
制造业自动化 2018年1期
汪成龙,黄余凤,陈铭泉,林浩斌,陈泽涛
(惠州学院电子信息与电气工程学院,惠州 516015)
0 引言
随着人力成本的提升,国内制造业加快了自动化改革的步伐。在自动化焊接技术中检测焊接脚的正确与否,通常让工人肉眼进行品质检测,但人眼具有视觉暂留,视觉疲劳等特点,容易造成误判和检测效率低等问题,因此为提高焊机技术行业生产效率和品质检测准确率,亟待研究一种快速精准的检测方法。当代自动化技术融入焊接技术可以给焊接行业带来新鲜血液,因此自动化焊接技术逐渐成为焊接行业的主流[1]。相对之前的焊接机,自动化焊接机有很多优势,但自动焊接机焊接脚的检测仍然面临着许多难题。
目前,自动焊接机焊接脚检测仍然是以工人检测为主,但此方法效率低,准确率不高,因此有必要研究一种速度快、准确率高的自动检测方法。
本文首先对采集到的自动焊接机焊接脚图片进行预处理,将图片中的噪音消除并且将杂质过滤掉;然后利用模板匹配和建立坐标系对图片进行定位操作;接着通过图像掩模准确地从图像中提取需要的区域,将不需要的区域屏蔽;最后经过二值化和形态学处理显示出焊接脚中出错的区域。实验表明,该方法能准确稳定地检测出焊接脚错误区域,且检测速度快、准确率高。
1 图像预处理
1.1 灰度化图像
灰度化图像是将彩色图像转化成为灰度图像的过程。现在大部分的彩色图像都是采用RGB颜色模式,但这种方式占用内存比较大,在处理时需要分别对RGB三种分量进行处理。如果在进行图像处理时先将图像转化为灰度图像后再进行下一步的操作,会减少工作量。经过灰度化处理的图像,用0~255代表其灰度值,0是黑色,255是白色。中间的取值分别代表不同的灰色。
图像的灰度化处理有两种常用方法:
1)平均值算法,即将当前像素的R、G、B三个分量求平均值,即:

2)加权平均法,这种方法的特点在于人眼对于各种颜色的敏感程度不同,因此对三个分量取不同的权值来进行加权平均计算,而人眼对于绿色的敏感程度较高,红色次之,蓝色最低,因此,以下公式能更好的得到灰度化图像:

通过以上任一方法得到的Gray值就是灰度化值。
1.2 滤波处理
在获取图像时,由于外界因素的干扰,图像中不时会呈现少许噪声,干扰了对图像的下一步操作。故在竭力保存图像特点的情况下,需要消除其噪声,过滤掉干扰信号,让后续处理可以更加准确。中值滤波[2]是将目标区域内的最大最小值全部视为噪声,用中值代替他们,让周围的点更接近真实值。这种非线性滤波算法,可以保留图像细节特征。中值滤波的算法相对比较简单,速度快,而且除噪效果好,特别是针对椒盐噪声(脉冲噪声)时有很好的效果。

图1 中值滤波后的图像
2 基于模版配的图像定位法
模版匹配就是从图像中获取部分小图像作为模版,或者将已有的图片作为模版,然后根据小图像在大图像中搜索有相同图像的目标,并得到其相应坐标位置。设计参数可以使图像在相似度低一点、有一定旋转角度的图像也能定位出来。
模版匹配在图像处理中是一个很重要的过程,经过模版匹配对其某个部位进行定位。确定坐标系,使其他图片能被同样的程序进行操作,或者在同一图片中获取相同的部位,然后进行后续操作[3]。
模版匹配常用的算法有两种,分别是平方差匹配和相关匹配,平方差匹配是利用平方差来进行匹配,当匹配参数越接近0时,匹配值越高,反之越小。其算法 如下:

而相关匹配正好相反,其得出的匹配参数越大时,匹配值越高,反之越低,其算法如下:


图2 建立的模板和坐标系
3 图像特征提取
3.1 图像掩模
图像掩模,一般指的是用形状或者图像对需要处理的图像进行掩盖,保留掩盖部位的图像值,把掩盖区域外的图像值清零。图像掩模可以准确的从图像中提取出需要的区域,还可以把不感兴趣或者不需要处理的区域屏蔽掉。
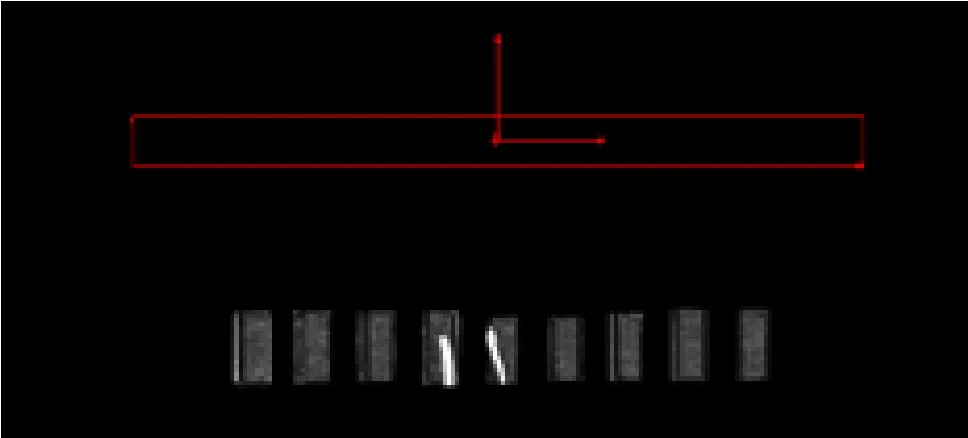
图3 图像掩模处理后的图像
3.2 二值化
将灰度化后的图像设定一个阈值A,图像中灰度值大于A的部分全部变成白色,小于A的部分全部变成黑色,就成了新的图像[4]。新的图像由灰度图像转化而来,使其0~255共256个灰度值减少到只有0和255两个灰度值,虽然会使图片信息数据丢失非常多,但相对于进行图像掩模后得到的部分区域是有用的。设置不同A的数值,获取的图像也不同,通过不断改变A的值而得到需要的二值化图像。图像在经过二值化处理之后,图像的数据就变少了,提高了图像处理效率。

表1 实验结果
3.3 形态学滤波
图像在经过二值化处理之后,由于图像干扰和噪声的存在,总存在着一些被错误分割出来的孤立点,于是需要用到形态学滤波[5]把这一部分小区域过滤掉,使图像的主体更能凸显出来。
形态学滤波的算法一般有四种:腐蚀运算、膨胀运算、开运算和闭运算。腐蚀运算可以消除图像中小的物体。膨胀是将物体与有和其他物体接触的地方合并到一起并且向外部膨胀。开运算可用于消除物体的边界使其变得平滑,但是又不明显地改变其面积。闭运算可用于填充物体内细小空洞、以及填充物体的边界,使其变得平滑但是又不明显地改变其面积。
图4~图6是采用不同的阈值进行腐蚀运算后得到的图像,经调试得知,当阈值设定为178时,图像最 清晰。

图4 阈值为160滤波后的图像

图5 阈值为180滤波后的图像
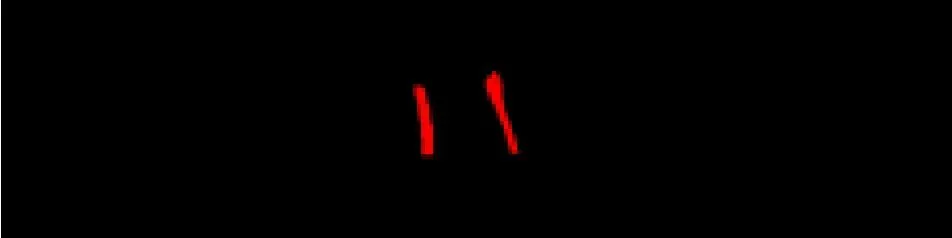
图6 阈值为200滤波后的图像
4 结论
以6张焊接脚图片为样本,利用LabVIEW编写检测软件,软件界面如图7所示。
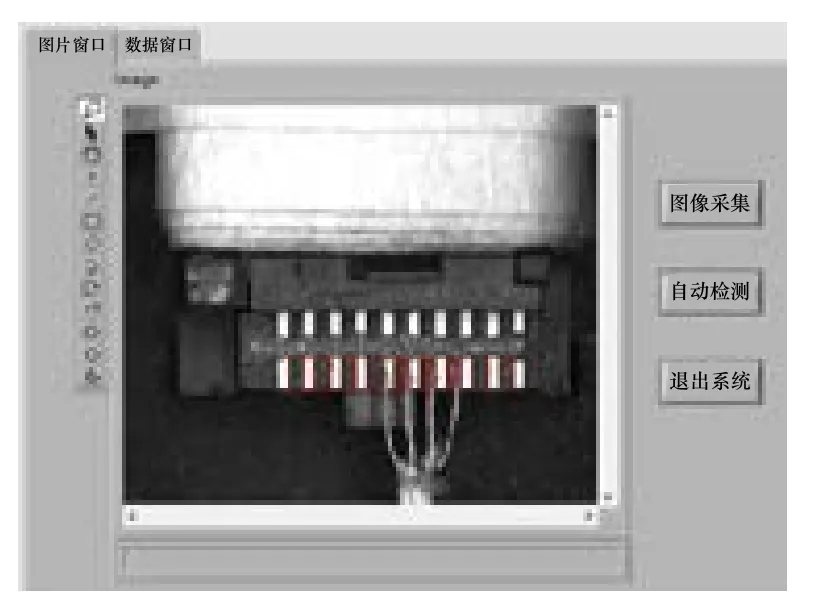
图7 焊接脚检测系统软件界面
表1表明,样本的匹配值都高于950,匹配相似度高,检测成功率都是100%。
得到结论如下:
1)检测稳定性高:对样本的定位准确,匹配 值高。
2)检测准确率高:对样本识别准确率达100%。
3)检测范围:该软件的编程过程简洁方便,在该软件平台基础上修改算法,可设计其他检测功能。
参考文献:
[1]王彬.我国焊接自动化技术的现状与发展趋势[J].焊接技术,2000,29(6):1-3.
[2]杨小静.基于LabVIEW和Matlab的图像去噪研究[D].2014:23-24.
[3]田娟,郑郁正.模板匹配技术在图像识别中的应用[J].传感器与微系统2008,27(1):2-3.
[4]朱军民,黄磊,刘昌平.图像二值化方法比较[J].2002:110-112.
[5]吴辰夏.二值化图像特征及其应用[D].2013:2-4.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
天津医科大学学报(2021年1期)2021-01-26
临床骨科杂志(2020年1期)2020-12-12
制造技术与机床(2019年9期)2019-09-10
电子制作(2018年16期)2018-09-26
自动化学报(2017年5期)2017-05-14
火控雷达技术(2016年3期)2016-02-06
探测与控制学报(2015年4期)2015-12-15
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05
