高超声速飞行器的神经网络PID控制*
2018-04-02 02:09:47和志伟戈新生
航天控制 2018年1期
管 萍 和志伟 戈新生
北京信息科技大学自动化学院,北京100192
高超声速飞行器具有反应敏捷,机动灵活,攻击准确等优点,已逐步成为各国关注的焦点[1-3]。不同于传统飞行器,高超声速飞行器受其飞行速度、高度以及飞行条件的影响,飞行器气动参数可能发生无法确定的非线性变化,很难建立精准的数学模型。因此,传统的控制算法很难满足高超声速飞行器姿态控制要求。目前,国内外在高超声速飞行器姿态控制方面已经取得了一定的突破。文献[4]采用非线性设计方法,扩张状态观测器能估计系统未知不确定性进行动态补偿,动态面控制可避免对虚拟指令直接微分,调节速度快,稳态精度高,有较强的强鲁棒性。文献[5]提出状态相关黎卡提方程方法设计控制器,能够自适应改变调节速度,优化输出。文献[6]采用模糊模型参考自适应控制方法,通过跟踪参考模型,保证控制效果,对模型变化有较强的自适应性及鲁棒性。然而上述方法未考虑飞行器飞行过程中气动参数的剧烈变化,未验证飞行器的姿态控制系统对气动参数摄动的鲁棒性。
本文针对高超声速飞行器飞行过程中气动参数变化导致的不确定性,将神经网络PID控制应用于高超声速飞行器纵向通道的姿态控制中,传统PID控制具有可靠性高、结构简单的特点,而将神经网络与PID控制相结合形成的神经网络PID控制既具有传统PID控制的特点,又具有神经网络的自主学习、自适应的特点,能够对PID控制参数进行合理推理计算和在线优化,增强控制系统的鲁棒性。针对高超声速飞行器动力学模型和运动学模型设计了高超声速飞行器的单神经元PID控制器和PID神经网络控制器,并推导了权值调整的学习算法。在线优化控制器的参数,使得高超声速飞行器的姿态控制系统能有效地抑制气动参数的变化,仿真结果也验证了该控制方法的有效性。
1 高超声速飞行器的纵向模型
对高超声速飞行器的运动特性进行解析,得到高超声速飞行器俯仰通道的数学模型为[7]:
(1)
(2)

某高超声速飞行器的气动参数如下[8]:
CL(α)=-8.19×10-2+4.70×10-2×Ma+
1.86×10-2×α-4.73×10-4×(Ma×α)-
9.19×10-3×Ma2-1.52×10-4×α2+5.99×

1.-7×(Ma×α)2+4.617×10-5×Ma3-
7.887×10-5×α3;
CM(q)=-1.36+3.86×10-1×Ma+7.85×
1.-4×α+1.40×10-4×(Ma×α)-5.42×
1.-2×Ma2+2.36×10-3×α2-1.95×10-6×
(Ma×α)2+3.80×10-3×Ma3-1.48×10-3×α3;
CM(δe)=-5.67×10-5-1.51×10-6×
Ma-6.59×10-5×α+2.89×10-4×δe-
4.46×10-6×(Ma×α)-5.87×10-6×(Ma×δe)
代入式(1)和(2)可得系统的运动学方程和动力学方程为:
(3)
(4)

5.87×10-6×Ma);g1为常数;f1(α)为随攻角α变化的非线性函数;g2为与飞行马赫数Ma有关的常数,当飞行马赫数Ma确定时,g2也为确定的常数;f2(α,q)为随攻角α和俯仰角速度q变化的非线性函数。
高超声速飞行器的纵向通道呈现非线性、强耦合性,当气动参数(CL,CM)大范围变化时,很难建立精准的数学模型。因此,控制的主要目标是设计一个合适的控制量即舵偏δe,使高超声速飞行器在气动参数(CL,CM)大范围变化时能快速精准的跟踪攻角指令信号。
2 神经网络PID控制器设计
基于多时间尺度,将高超声速飞行器的姿态模型划分为快回路和慢回路,控制系统结构如图1所示。快回路为俯仰角速度反馈,变化迅速,采用神经网络控制器,产生控制力矩;慢回路为攻角反馈,变化缓慢,采用传统的PID控制器,产生快回路制导指令。在外环控制器设计过程中,以预期攻角指令信号作为输入,攻角预期值αref与实际值α的偏差作为外环控制器的输入,外环控制器的输出即俯仰角速度qref作为内环的输入;内环输入的角速度信号qref与实际的角速度q的偏差作为神经网络控制器的输入,输出为控制力矩δe,作为高超声速飞行器动力学模型的输入。通过控制飞行器的舵偏δe来实现对给定攻角指令信号的稳定跟踪。针对这2个回路分别设计PID控制器和神经网络PID控制器。
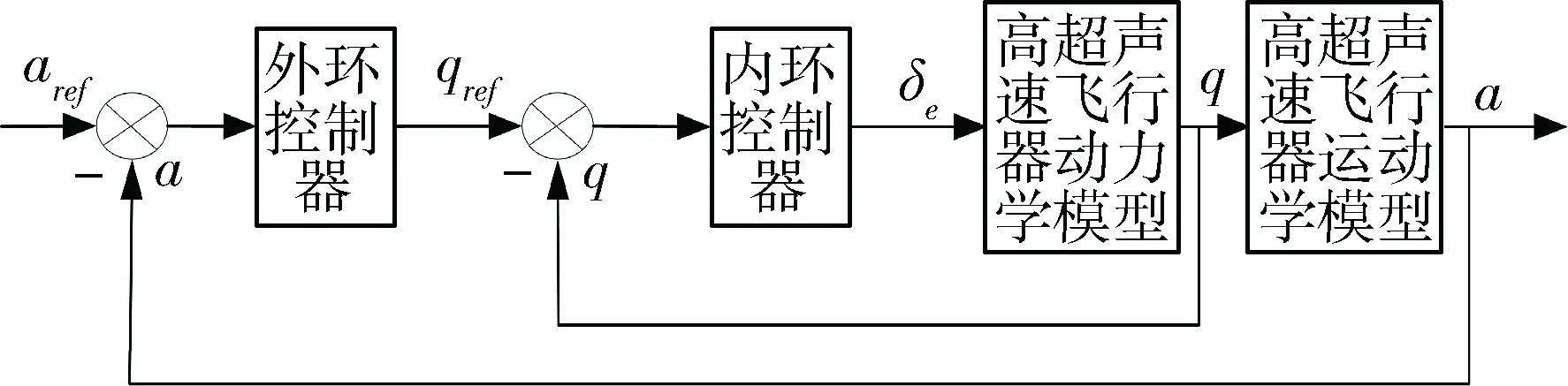
图1 高超声速飞行器神经网络PID控制系统结构图
2.1 外环回路控制器设计
给定攻角预期值αref,反馈的实际攻角值为α,则此时攻角的误差eα为
eα=αref-α
(5)
eα作为外环PID控制器的输入,控制器的系数分别为kp,ki和kd,外环控制器的输出qref为
(6)
2.2 内环回路控制器设计
俯仰角速度期望值为qref,实际值为q,则俯仰角速度的偏差eq为
eq=qref-q
(7)
针对高超声速飞行器的内环控制器设计,分别采用单神经元PID控制和PID神经网络控制。
2.2.1 单神经元PID控制器设计
将单神经元与PID相结合,构成高超声速飞行器的单神经元PID控制器[9]。
PID的位置式控制为
(8)
由式(8)得到PID的增量式控制为

(9)
由此得到高超声速飞行器的单神经元PID控制算法,单神经元PID控制结构图如图2所示。

图2 单神经元PID控制结构图
(10)
式中,x1(k)=eq(k);x2(k)=eq(k)-eq(k-1);x3(k)=eq(k)-2eq(k-1)+eq(k-2);K为神经元的比例系数;wi是神经元的权值。
采用Hebb学习规则,得到权值调整的学习算法:
w1(k)=w1(k-1)+ηIeq(k)δe(k)x1(k)
w2(k)=w2(k-1)+ηPeq(k)δe(k)x2(k)
w3(k)=w3(k-1)+ηDeq(k)δe(k)x3(k)
(11)
对积分、比例和微分项中的权值wi分别采用了不同的学习速率ηI,ηP,ηD,以便对不同的权系数分别进行调整。
2.2.2 PID神经网络控制器设计
将神经网络与PID结合,构成高超声速飞行器的PID神经网络控制器。
PID神经网络的结构如图3所示:

图3 PID神经网络结构图
输入层: 输入[qref,q],输出与输入相等。
隐层: 输入
xi(k)=qred-q,i=1, 2, 3
(12)
输出
q1(k)=x1(k)
(13)
q2(k)=q2(k-1)+x2(k)
(14)
q3(k)=x3(k)-x3(k-1)
(15)
输出层:
(16)
高超声速飞行器的PID神经网络控制器采用反向传播学习算法,设准则函数
(17)
在要求的限度之内,经由k步迭代后,权值调整算法为:
(18)
(19)
(20)
等效替代,它的正负可以决定其在权值调整算法中对收敛方向所起的作用。式(19)可化为
(21)
将式(21)代入式(18)得
w1(k+1)=w1(k)+η2·eq(k)·q1(k)
w2(k+1)=w2(k)+η2·eq(k)·q2(k)
w3(k+1)=w3(k)+η2·eq(k)·q3(k)
(22)
式中,η2是学习步长,对隐层至输出层的权值进行调整。
单神经元PID控制实质上用单神经元实现了PID增量式控制,PID神经网络控制用神经网络实现了PID的位置式控制,二者都借助神经网络的学习使PID神经网络既具有PID控制的鲁棒性,又使PID参数能够在线调节,具有较强的自适应能力。
3 仿真研究
分别将单神经元PID控制器和PID神经网络控制器应用于高超声速飞行器纵向通道的姿态控制中,进行仿真研究。取高超声速飞行器飞行马赫数Ma=5,飞行高度为36.576km。外环控制器参数kp=50,ki=0.6,kd=0.1。仿真过程中,采样周期τ=0.001s。在不同的控制律下,攻角的阶跃响应曲线如图4所示,攻角的方波响应曲线如图5所示,阶跃响应时的舵偏响应曲线如图6所示,方波响应时的舵偏响应曲线如图7所示。

图4 攻角阶跃响应曲线
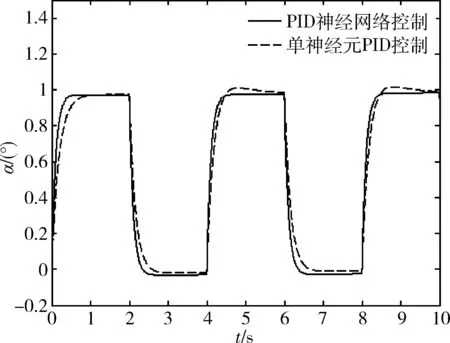
图5 攻角方波响应曲线
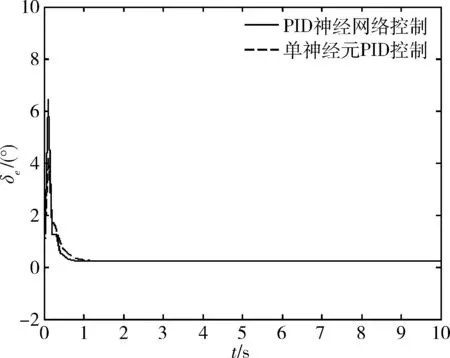
图6 阶跃响应时舵偏角的响应曲线

图7 方波响应时舵偏角的响应曲线
从仿真结果可看出,PID神经网络控制系统与单神经元PID控制系统都能够在保证没有超调的情况下快速跟踪攻角指令信号,但单神经元PID控制系统调节时间约为1.0s,而PID神经网络控制系统的调节时间小于0.5s。由此可见,PID神经网络控制系统无超调,调节时间短,无稳态误差,具有更好的动静态性能和较好的控制品质。
由于高超声速飞行器恶劣的飞行环境,气动参数变化范围大,因此要求高超声速飞行器的控制器要具有较强的鲁棒性。为了检验PID神经网络控制系统在气动参数变化范围大情况下控制系统的稳定性,分别在气动参数变化±30%和±50%的情况下进行仿真研究。气动参数变化+30%、+50%、-30%和-50%时不同控制器下攻角的阶跃响应曲线分别如图8~11所示。

图8 气动参数变化+30%时的攻角响应曲线

图9 气动参数变化+50%时的攻角响应曲线

图10 气动参数变化-30%时的攻角响应曲线
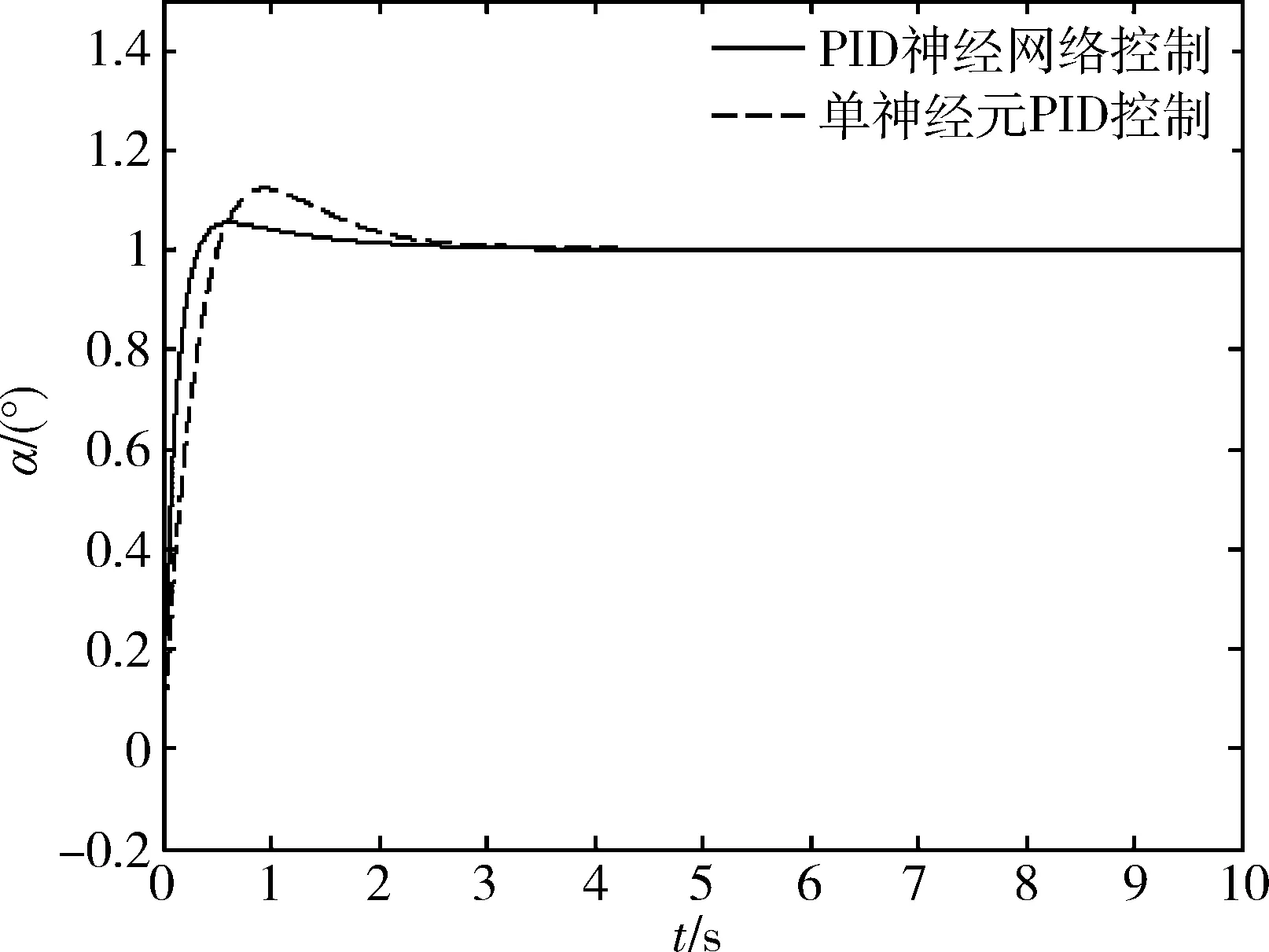
图11 气动参数变化-50%时的攻角响应曲线
从仿真结果可看出,2种控制器均能有效抑制气动参数变化。然而与单神经元PID控制相比,由于PID神经网络神经元个数增多,可调参数调整灵活,因此自适应能力更强。仿真结果显示,在气动参数剧烈变化的情况下,单神经元PID控制调节时间较长,超调量较大,而PID神经网络控制系统超调量小,能较快达到稳定,调节时间仍然较短,稳态误差也能达到控制精度范围,因此PID神经网络控制系统对气动参数的变化有较强的抑制作用。而且,PID神经网络与单神经元PID控制相比更易于调整参数,设计方法更加简单。
4 结论
将神经网络控制算法与PID控制相结合应用到高超声速飞行器纵向通道的姿态控制中,针对高超声速飞行器的动力学模型和运动学模型设计了单神经元PID控制算法和PID神经网络控制算法,并推导了权值调整的学习算法,实现了PID参数的在线优化,使其不依赖于被控对象精确的数学模型,并增强高超声速飞行器姿态控制系统对气动参数摄动的鲁棒性。仿真结果表明,高超声速飞行器的神经网络PID控制系统不仅有较好的跟踪性和稳定性,对攻角阶跃指令和方波指令有较高的跟踪精度和较快的跟踪速度,而且能抑制气动参数变化的影响,有较强的鲁棒性。神经网络PID控制算法简单,鲁棒性强,易于实现,具有广阔的工程应用前景。
[1] 陈亚飞, 陈敬一. 巴西14-X高超声速飞行器计划发展综述[J].飞航导弹, 2013, 8(8):9-12. (Chen Yafei, Chen Jingyi. Brazilian 14-X Hypersonic Aerospace Vehicle Project [J]. Winged Missiles Journal, 2013, 8(8): 9-12.)
[2] 安慧. 美国的高超声速计划[J].太空探索, 2013, 7(7): 22-27. (An Hui . Hypersonic Program in the United States [J]. Space Exploration, 2013, 7(7): 22-27.)
[3] 谭诗利, 王洁, 王鹏飞. 基于反演的高超声速飞行器动态面滑模控制[J]. 航天控制, 2016, 34(4): 23-28. (Tan Shili, Wang Jie, Wang Pengfei. The Dynamic Surface and Sliding Mode Controller Design for Hypersonic Vehicles [J]. Aerospace Control, 2016, 34(4): 23-28.)
[4] 刘晓东, 黄万伟, 禹春梅.含扩张状态观测器的高超声速飞行器动态面姿态控制[J].宇航学报, 2015, 8(36): 916-922.(Liu Xiaodong, Huang Wanwei, Yu Chunmei. Dynamic Surface Attitude Control of Hypersonic Vehicle Containing Extended State Observer [J]. Journal of Astronautics, 2015, 8(36): 916-922.)
[5] 晏资湘.基于SDRE方法的高超声速飞行器姿态控制[J]. 导弹与航天运载技术, 2015, 3(3): 10-12.(Yan Zixiang. Hypersonic Vehicle Attitude Control Based on SDRE [J]. Missiles and Space Vehicles, 2015, 3(3): 10-12.)
[6] 程仙垒, 刘鲁华, 汤国建. 高超声速飞行器模糊模型参考自适应控制方法[J]. 航天控制, 2014, 32(4): 13-18.(Cheng Xianlei, Liu Luhua, Tang Guojian. The Research on Fuzzy Model Reference Adaptive Control for Hypersonic Vehicle [J]. Aerospace Control, 2014, 32(4): 13-18.)
[7] 李惠峰.高超声速飞行器制导与控制技术[M]. 北京: 中国宇航出版社, 2012:54-85.(Li Huifeng. Guidance and Control Technology of Hypersonic Vehicle [M]. Beijing: China Aerospace Publishing House, 2012: 54-85.)
[8] Shahriar Keshmiri, Richard Colgren, Maj Mirmirani. Development of an Aerodynamic Database for a Generic Hypersonic Air Vehicle [R]. San Francisco:AIAA, 2005-6257,2005.
[9] 刘金琨.先进PID控制及其MATLAB仿真[M].北京: 电子工业出版社, 2003: 87-96. (Liu Jinkun. Advanced PID Control and Its MATLAB Simulation [M]. Beijing: Electronic Industry Press, 2003: 87-96.)
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01 06:29:48
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
农业机械学报(2020年2期)2020-03-09 07:35:30
宇航总体技术(2019年5期)2019-10-11 07:32:56
中华建设(2019年7期)2019-08-27 00:50:18
小哥白尼(趣味科学)(2018年5期)2018-06-21 06:24:32
北京航空航天大学学报(2017年7期)2017-11-24 05:27:22
项目管理技术(2016年12期)2016-06-15 20:29:33
西南交通大学学报(2016年6期)2016-05-04 04:13:11
振动与冲击(2015年2期)2015-05-16 05:37:34