
红外脉冲激光测距仪发收光轴一致性测试方法研究
2018-03-29 05:12:15王若帆张国玉曹秒王卉吴畏
长春理工大学学报(自然科学版) 2018年1期
王若帆,张国玉,曹秒,王卉,吴畏
(1.长春理工大学 光电工程学院,长春 130022;2.长春理工大学 生命科学技术学院,长春 130022;3.中国人民解放军驻一三三厂军事代表室,长春 130022)
脉冲激光测距是当前最便利、技术成熟度最高的测距手段,它不需要合作目标,对非镜面目标都可以直接测距。脉冲激光测距模块应用很广,在许多现代测量仪器上都有应用,例如电子全站仪、武器火控系统、汽车防撞雷达等设备上都有脉冲激光测距模块[1]。脉冲激光测距仪的激光发射、接收光轴一致性是其测距性能的保障,发射、接收光轴一致性不好的测距仪,其对较远测距目标的准测率不会太高[2]。因此,脉冲激光测距仪的发射与接收光轴一致性检测非常重要[3]。本文研究“红外脉冲激光测距仪发、收光轴一致性测试方法”,可为相关设备生产厂家提供生产组装环节的质量保证、出厂检验等提供检测手段。
1 发收光轴一致性检测系统设计
1.1 测试原理
本项目以离轴抛物面反射镜为主体构建一个牛顿式反射平行光管系统,为被测试红外脉冲激光测距仪提供无穷远靶标(光源)。该靶标是位于离轴抛物面反射镜焦点处的激光上转换板,可接收红外脉冲激光光斑并转换为可见光光斑,确定红外脉冲激光测距仪的激光发射轴;或者安装自发激光衰减反馈组件输出端平移扫描机构,延迟被测试红外脉冲激光测距仪的自发激光脉冲作为光源,去测试激光接收光轴的位置。结构原理图如图1所示。
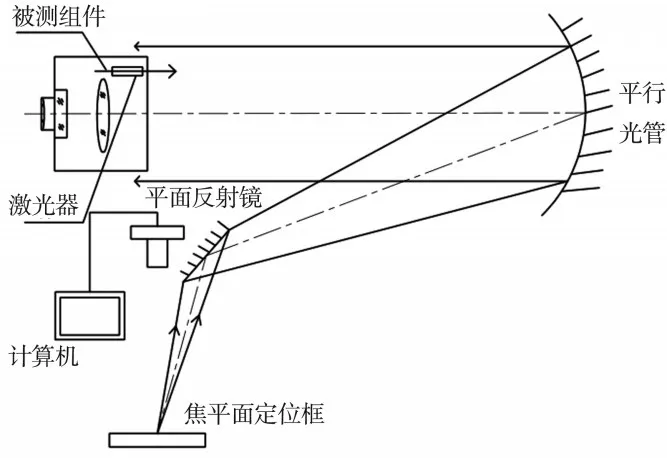
图1 发、收光轴一致性测试仪结构原理图
1.2 光学结构设计
检测系统采用离轴牛顿反射式平行光管,利用离轴抛物面反射镜对红外激光进行汇聚及反射[4]。
离轴抛物面反射镜是本系统的重要组成部分,其光学参数为:焦距f=1500mm,离轴量Q=200mm,口径D=150mm。其光学系统如图2所示。

图2 离轴抛物面平行光管光学系统
1.3 图像采集及处理
检测系统利用CCD相机对图像进行采集,并对汇聚在上转换片上的光斑进行实时捕捉。控制计算机对接收到的图像和数据进行计算与测量,准确计算出光斑中心点,以及测量接收轴时的视场边缘,从而计算出红外脉冲激光测距仪激光接收视场中心点,并实时显示[5]。
2 发收光轴一致性检测系统应用
2.1 检测操作流程
如图3所示,当测量发射光轴时,将上转换板安装到焦平面定位框上,脉冲激光测距仪发射测距激光,激光经离轴抛物面反射镜反射后,再经平面反射镜反射汇聚到位于焦平面上的上转换板上,会形成可见光光斑,由测量相机拍摄并记录,可以求出光斑中心,坐标为(x1,y1),该位置可以表征激光发射轴。

图3 红外脉冲激光测距仪发射轴测试原理示意图
测量激光接收轴时,如图4所示,保持脉冲激光测距仪位置不动,将上转换板换下,将自发激光衰减反馈模块的光纤输出端子安装到焦平面定位框上,将被试脉冲激光测距仪稳定地架设在承载台上,通过离轴平面反射镜自发激光衰减反馈组件的输出端子,将被试脉冲激光测距组件设置为单脉冲工作方式,设置距离为最小值。发射多个激光脉冲,被试脉冲激光测距仪显示距离值与光纤长度应相对应,此时自发激光衰减反馈组件的输出端子在被试脉冲激光测距仪的接收视场内。
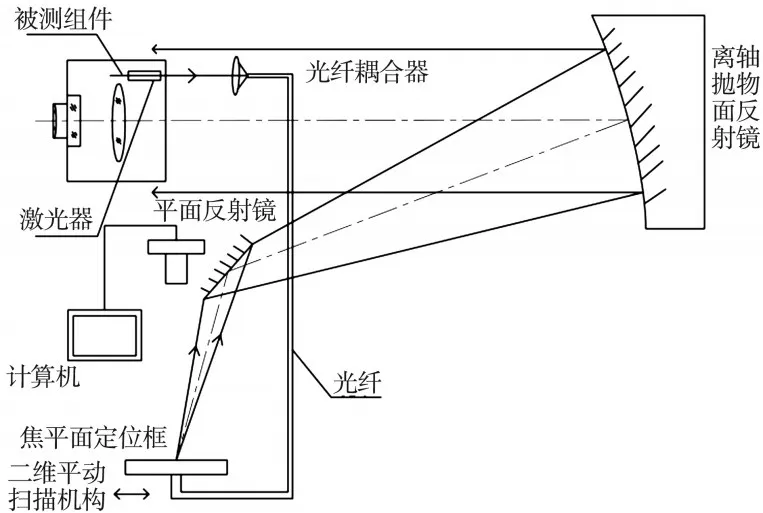
图4 红外脉冲激光测距仪接收轴测试原理示意图
控制光纤输出端在平行光管焦平面上沿上下进行移动,发射多个激光脉冲,直至每次都显示无回波,反向移动较小距离。重复上述过程,调整到被试脉冲激光测距仪能部分测得距离值,部分显示无回波。当回波率达到指标要求时,以测量相机拍摄记录此时自发激光衰减反馈组件的输出端子在焦平面定位框内的位置。
重复上述过程,分别向4个不同方向移动,获得4个接收视场边缘点。拟合出上述各点的圆心位置,坐标为,这个圆心位置可以表征被试脉冲激光测距仪的激光接收轴。
通过图像判读,可以得到上转换板上激光光斑中心与4个接收视场边缘点拟合圆心之间的距离Δx,如公式1所示。根据平行光管的焦距即可得到被试脉冲激光测距仪的收发光轴的偏差角。如公式2所示:

2.2 测试结果
采用上述方法对某台红外激光测距仪发、收光轴一致性进行多次测量,结果如表1所示,以多次测量的平均值为真值,并计算其标准差。

表1 发收光轴偏差表(mrad)
3 测量精度分析
决定激光发射轴测量精度的关键因素是测量相机,其次是数字图像判读软件的判读精度[6]。脉冲激光测距仪的激光束散角一般不大于2.5mrad,则在激光上转换板上显示的光斑直径一般不会超过4mm[7]。测量相机配以ZL0911镜头,其窄边视场不大于6.9mm。则每个像素对应的距离为:6.9/1024=6.74μm。通过一定的加权算法,可以实现亚像元判读,判读精度可以达到σ发≤3μm。即:激光发射轴的判读精度为:σ1≤3/1500=0.002mrad。
激光接收轴测量精度关键取决于自发激光衰减反馈组件输出端平移扫描机构的测控精度[8]。因为二维位移测量精度σ移动≤1.0μm,所以由此产生的激光接收轴测量精度为:
由于激光发射轴和激光接收轴的测量是在两个相互独立的坐标系中实现的[9]。所以在计算红外脉冲激光测距模块发、收光轴一致性时,必须进行两个坐标系的统一,这个过程就是通过测量相机判读自发激光衰减反馈组件输出端在相机视场中某一时刻的位置,从而将两个测量坐标系统一[10]。由此造成的误差主要是测量相机的判读误差以及测量相机的像素坐标系的横纵两轴与自发激光衰减反馈组件输出端二维平移方向的偏差所造成的。测量相机的判读误差较小,而两个测量坐标系横纵轴不平行的问题可以通过测量相机的姿态调整进行消减,但不能完全消除[11],由此所造成的位移判读偏差可以调节到:σ对准≤0.05mm,由此产生的坐标统一误差为:σ3≤0.05/1.5=0.033mrad。
所以红外脉冲激光测距模块发、收光轴一致性测量精度能够达到
4 结论
此测试方法利用离轴抛物面牛顿反射式平行光管设计技术、高精度位移测控技术、800nm~1600nm红外激光上转换技术、数字图像判读技术,有效测量红外脉冲激光测距仪发、收光轴一致性。此测试方法测量精度高,操作简单,完成了精度为0.05mil的技术指标。
[1]金伟其,王霞,张其扬,等.多光轴一致性检测技术进展及其分析[J].红外与激光工程,2010,39(3):526-531.
[2]刘建.光轴一致性测量技术原理与应用[J].云光技术,2010,42(1):33-36.
[3]柏公欣,安志勇,肖作江,等.激光瞄具多轴一致性检测系统研究[J].长春理工大学学报:自然科学版,2012,35(2):21-25.
[4]袁旭沧.光学设计[M].北京:北京理工大学出版社,1988:92-93.
[5]董健.通信侦察的高速数字信号处理[D].成都:电子科技大学,2007.
[6]陈弈,郭颖,杨俊,等.脉冲式高精度激光测距技术研究[J].红外激光工程,2010,31(6):236-238.
[7]Pierce DS,Morrison BR.A novel laser triangulation technique for high precision distance measurement[M].Industry Applications Society Annual Meeting,1992.
[8]Dminique Miller.Laser range finder based on fully digital phase-shift measurement[J].IEEE Instrumentation and MeasurementTechnology Conference,1999:1773-1776.
[9]Maatta K,Kostamovaara J.A high-precision timeto-digital converter for pulsed time-to-flight laser radar applications[J].IEEE Instrumentation and Measurement Technology Conference,1998,47(2):521-536.
[10]吴应明.便携式脉冲激光测距仪的研制[D].西安:西安电子科技大学,2009.
猜你喜欢
中国光学(2024年1期)2024-02-05 09:06:24
红外技术(2022年11期)2022-11-25 08:12:12
中国交通信息化(2022年12期)2022-02-11 12:05:14
摄影之友(2020年12期)2020-12-23 09:39:39
航空兵器(2019年2期)2019-05-30 00:00:00
测控技术(2018年12期)2018-11-25 09:37:26
价值工程(2017年8期)2017-03-25 10:16:21
卷宗(2017年1期)2017-03-17 09:14:36
光学精密工程(2016年1期)2016-11-07 09:01:05
科技视界(2016年16期)2016-06-29 20:57:07
