
深度学习在接触网定位器缺陷检测中的应用
2018-03-29 02:21张毅
铁路计算机应用 2018年3期
张 毅
(中国铁路沈阳局集团有限公司 供电处,沈阳 110001)
接触网是电气化铁路上的主要供电装置,它通过钢筋混凝土支柱及软横跨、硬横跨等,以一定的悬挂形式将高压接触线架设在铁轨的上方。它的功能是通过与电力机车车顶受电弓之间的滑动接触将电能传递给电力机车(或电力动车组)[1]。正常情况下,接触线和受电弓之间采用滑动接触连接,当列车行驶速度过快、道路不平顺导致受电弓纵向起伏、强风导致接触线上下左右舞动、定位装置异常导致接触线高度超限等情况下,将导致受电弓取流不均匀、打弓、燃弧、火花放电、拉出值超限等异常现象。因此,有必要在列车运营过程中对接触网进行各种异常缺陷检测和识别。
基于图像处理技术的非接触式接触网缺陷检测系统是建立在图像处理、模式识别、计算机视觉、机器学习等技术之上的检测系统[2-3]。这种系统所需的所有信息全部通过相机来获取,具有检测方法简单、检测设备无磨损、不需要高低电压隔离、使用寿命长、易于维护、不必对受电弓进行改造、安全系数大等优点。但是,传统的基于图像处理技术的方法在接触网缺陷检测过程中存在检测精度低、误检率高等缺点。本文采用深度学习技术对接触网图像进行定位器缺陷的检测识别,相比传统图像处理方法,可以大幅提高缺陷检测的准确率[4-5]。
1 接触网定位器故障分析
接触网是通过接触线和定位器直接与受电弓相互作用。定位器、接触线与受电弓的动静态空间位置关系、相互作用力是确保弓网平稳受流的关键。
(1)定位器安装完成后,定位系统、接触网悬挂系统达到力学平衡,接触导线处于平直状态,此时定位器相对于受电弓平面的夹角为安装坡度。定位器安装坡度要考虑受电弓外形尺寸、受电弓最大摆动量、动态最大抬升量等因素的影响。
(2)定位器安装后处于力平衡状态,不可随意调整,否则定位点会产生人为的抬高或降低,形成硬点。
(3)安装坡度过小,可能发生受电弓与定位器碰撞;安装坡度过大,则要减少拉出值或增加第一吊弦距定位点的距离。
(4)减小拉出值会加速受电弓的不均匀磨耗,增大第一吊弦距定位点的距离会影响弓网受流质量。
因此,接触网定位器坡度应该保持在一个合理的范围内,坡度偏大或偏小都会破坏受电弓和接触线之间的力学平衡,严重时甚至会引起弓网事故。
2 深度学习原理
深度学习是通过构建具有很多隐层的机器学习模型和海量的训练数据,从而自动学习更为有用的特征,并完成最终的分类识别功能。
深度学习的概念源于人工神经网络的研究,含多个隐层的多层感知器就是一种深度学习结构,如图1和图2所示。深度学习通过组合低层特征形成更加抽象的高层表示属性类别或特征,以发现数据的分布式特征表示。深度学习采用了神经网络相似的分层结构,系统由输入层、隐层(多层)、输出层组成的多层网络,只有相邻层节点之间有连接,同层以及跨层之间相互无连接,每一层可以看作是一个逻辑回归模型;这种分层结构,是比较接近人类大脑结构的[7-8]。
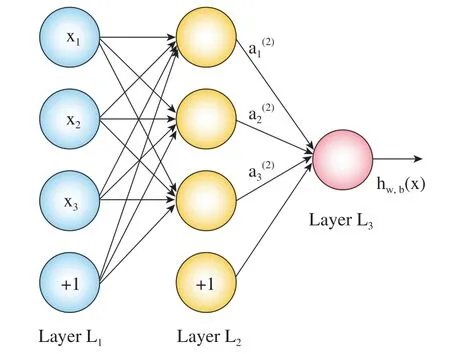
图1 神经网络模型
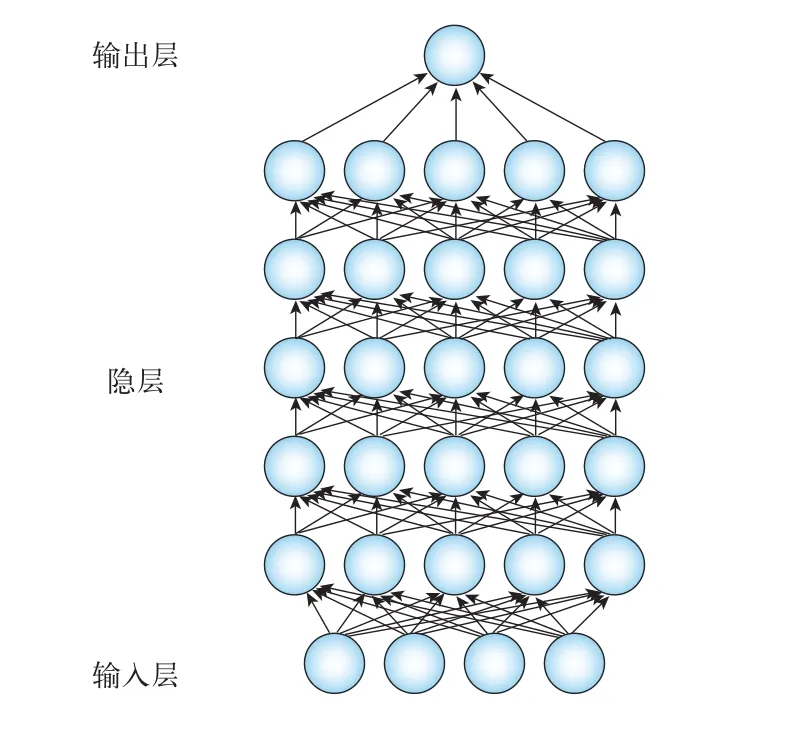
图2 深度学习模型
卷积神经网络是深度学习处理图像问题的一种典型架构。它模拟生物神经网络通过权值共享网络结构,降低了网络模型的复杂性,减少了网络参数的数量,提升了反向传播算法的训练性能,特别是卷积网络在处理多维图像时的表现更为优越。网络的结构与图像的拓扑结构相匹配,使得图像的原始像素点可以直接作为模型的输入,降低了数据的预处理要求,避免了传统模式识别算法中复杂的特征提取和数据重建过程。此外,卷积网络通过图像的小部分(局部感受区域)区域作为层级结构的最低层的输入,将信息依次传输到不同的层,每层通过一个卷积滤波器去获得输入数据的最显著特征。因为图像的局部感受区域允许神经元或者处理单元可以访问到最基础的特征,例如定向边缘或者角点,所以这个方法对平移、比例缩放、倾斜或者其他形式的变形具有高度不变性[9]。
基于区域的深度卷积网络是对深度卷积网络的进一步延伸。深度卷积网络解决了图像的分类问题,但无法得到图像中感兴趣目标的位置。基于区域的深度卷积网络通过备选区域生成算法图像中可能的目标区域,然后对可能存在的区域进行目标分类,实现了目标检测功能。通过目标检测,可以实现接触网定位器的快速定位。在包含定位器的局部图像区域内,对图像进行精密分析和比对,可以快速得到可能存在的定位器缺陷[10]。
3 接触网定位器缺陷检测系统构成
接触网定位器缺陷检测系统可以安装在接触网检测车上,也可以安装在运营电力机车或动车组上。系统由数据采集、数据分析、数据存储、报警缺陷传输、查询检索等模块构成,如图3所示。
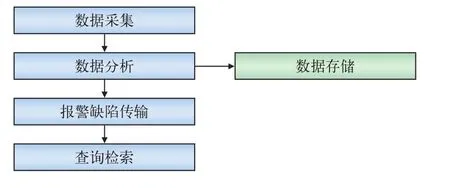
图3 定位器缺陷检测系统结构
(1)数据采集:由工业相机、补光灯、信号触发单元、图像采集卡等构成。其中,工业相机用于图像信息采集;补光灯在夜间、隧道等低照度环境下为接触线及其电气连接件提供照明;信号触发单元提供触发信号给补光灯和工业相机进行同步触发抓拍操作;图像采集卡接收来自工业相机的图像数据并进行简单的去噪、滤波、增强操作,同时还可以将图像数据进行有损压缩,从而节约数据存储空间。
(2)数据分析:由工控机、图形处理单元及相关的软件和算法构成。其中,工控机用于接收图像数据并运行相应的软件和图像处理、深度学习算法进行相应的数据分析处理操作。图形处理单元通常指代GPU,它在传统显卡的基础上增加了若干并行计算单元,非常适合深度学习算法的运行计算。
(3)数据存储:将工业相机采集到的图像信息、工控机、相机的温度、网络通信状态等信息进行存储,方便前端设备状态的跟踪与维护。
(4)报警缺陷传输:采用3G、4G等无线通信网络,将数据分析模块得到的缺陷报警信息传输到后端服务器。
(5)查询检索:将车载端检测生成的报警缺陷存储至数据库当中,方便后期查询检索和管理维护。
4 采用深度学习进行定位器检测定位
本文提出的深度学习算法主要应用于数据分析模块,具体来说,对数据采集模块得到的图像数据采用深度学习算法进行定位器的检测定位,进而对其进行坡度计算,从而实现定位器坡度是否超限的判断。
本文针对定位器的检测与定位问题,提出了一种基于区域卷积神经网络的弓网图像检测算法。该算法可以高效地检测定位器在图像中的精确位置,而且该算法对图像抖动、噪声和光照等干扰都具有较好的鲁棒性[13]。
4.1 定位器区域定位
基于深度学习的定位器区域定位算法流程如图4所示。
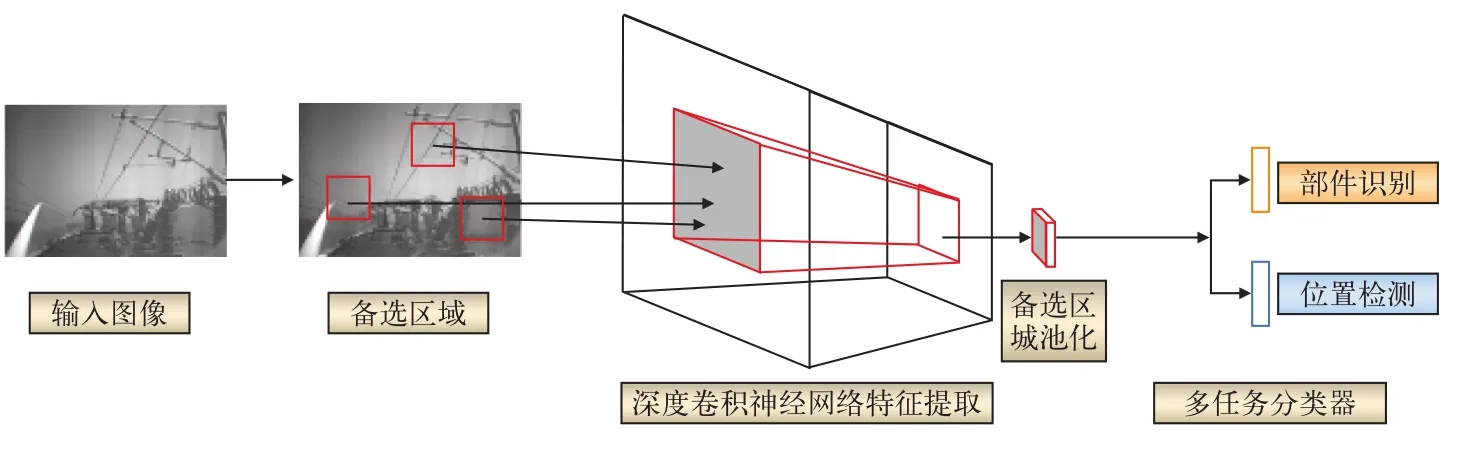
图4 定位器区域定位算法流程图
(1)生成备选区域,通过选择搜索算法实现,假设图像上有n个预分割的区域,表示为R={R1,R2, ..., Rn}, 计算每个区域与它相邻区域的相似度,这样会得到一个n • n的相似度矩阵(同一个区域之间和一个区域与不相邻区域之间的相似度可设为无穷大),从矩阵中找出最大相似度值对应的两个区域,将这两个区域合二为一,这时候图像上还剩下n–1个区域;重复以上过程(只需要计算新的区域与它相邻区域的新相似度,其他的不用重复计算),重复一次,区域的总数目就少一个,直到最后所有的区域都合并称为同一个区域,即此过程进行了n–1次,区域总数目最后变成了1。
(2)深度特征提取,通过深度卷积神经网络实现。
(3)特征降维,通过空间池化法来实现。假定备选区域池化层的输入维数为H • W,表示含有H行和W列。那么备选区域池化层可以表示为一族(r, c,h, w),它包括备选区域的位置(r, c)和它的长宽(h, w) 。为了得到确定的池化输出(H′, W′),我们动态改变池化的步长。对于每一个备选输出层而言,通常会基于(H′, W′)定义一个池化步长(s1, s2)=(h/H′, w/W′),那么就可以将不同尺度的输入图像归一化到一个相同尺度的池化层输出(H′, W′)。
(4)定位器检测定位,采用基于区域的卷积神经网络通过多任务分类器来实现。与传统神经网络类似,多任务分类器包含K+1个离散的神经元节点p=(p0,…, pk), 表示图像有K+1个类别,其中k=0表示背景,并采用Softmax函数作为输出函数。在目标检测层中,网络定义一个针对第k类别的区域边界回归问题tk=(tkx, tky, tkw, tkh)。tk表示第k类目标的备选区域与真实位置的中心点坐标(tx, ty),高度tw和宽度th的偏差。多任务损失函数L定义为:

式中,k*表示目标真实类别; t表示目标检测层输出的偏差,t*表示备选区域的真实偏差,αk表示图像中属于第k类目标的个数。分类损失函数采用标准的交叉熵损失Lcls(p, k*)=–logpk,pk表示分类输出层第k个节点的输出。
4.2 定位器直线检测
通过基于深度卷积网络方法可以获取包含定位器的局部区域,在局部区域内进行定位器轮廓提取可以高效的确定定位器的精确位置。主要方法如图5所示:(1)对局部区域图像进行Canny边缘提取;(2)对提取的边缘利用Hough变换进行直线检测。
Canny边缘检测考虑了图像噪声的影响,因此是一种很好的边缘检测算法。Canny边缘提取算法,它采用了一阶导数Sobel算子并且力图在抗噪声干扰和精确定位之间寻找平衡。
Hough变换是一种常用的直线检测方法,其基本原理在于利用点与线的对偶性,将原始图像空间的给定的曲线通过曲线表达形式变为参数空间的一个点。将原始图像中给定曲线的检测问题转化为寻找参数空间中的峰值问题,即把检测整体特性转化为检测局部特性。
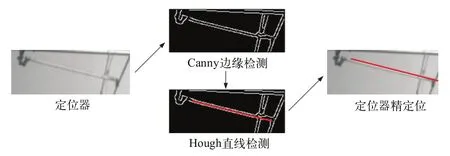
图5 定位器直线拟合
通过定位器区域定位和定位器直线检测两个步骤,我们可以获取定位器在图像中的精确位置,从而为将来进一步研究定位器坡度计算、定位器导向拉出值和定位器缺陷检测等工作打下了基础。
5 接触网定位器缺陷诊断
5.1 缺陷诊断方法
定位器一端固定在支座上,另一端用于固定接触线,使得两者安装后达到力平衡状态。直线区间定位器坡度应控制在8°~12°之间,超出该范围就认为定位器超限,需要进行相应的报警提示。曲线区间定位器应控制在6°~16°之间,超过该范围就存在定位线夹碰撞受电弓的风险,需要进行相应的报警提示。
5.2 故障诊断实例分析
这里先给出正常场景和隧道场景下的定位器检测效果示意图。从图6中可以看出,本文提出的定位器检测算法可以准确地给出定位器的局部区域并且精确检测定位器直线。
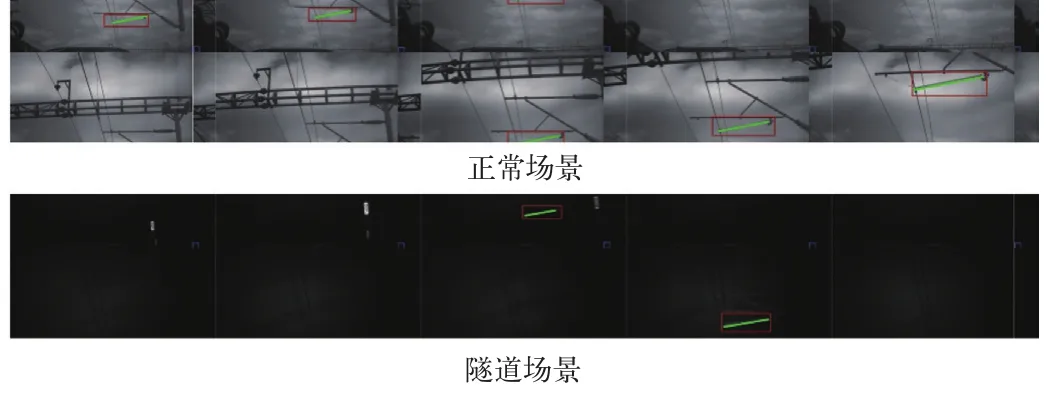
图6 典型场景下定位器检测示意图
在检测到定位器局部区域,并精确检测到定位器直线的情况下,就可以进行定位器坡度的计算了。图7、图8分别给出定位器坡度过大和过小的典型缺陷报警图片。
(1)图7所示为车辆通过直线区间时,定位器坡度为14°,超过规定的最大12°的限值。
(2)图8所示为车轮通过硬横跨时,定位器坡度为4°,超过规定的最小8°的限值。
6 结束语
本文利用深度学习技术进行接触网定位器区域的检测定位,利用Canny算子和Hough变换进行定位器直线拟合,进而计算得到定位器坡度,在此基础上做出定位器坡度是否超限的判断。然而,由于整个系统投入使用时间较短,尚需进一步改进优化,使得系统对图像过曝、欠曝、低照度、模糊等成像条件下的定位器检测定位精度更高,直线拟合准确性更佳。

图7 定位器坡度过大

图8 定位器坡度过小

参考文献:
[1]罗 健. 高速铁路接触网定位器坡度问题的深化研究[J],铁道工程学报,2013(1):76-81.
[2]Nasrabadi N M. A stereo vision technique using curve-segments and relaxation matching[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 1992(5): 566-572.
[3]Lowe D G. Distinctive image features from scale-invariant keypoints[J]. International journal of computer vision, 2004,60(2): 91-110.
[4]Felzenszwalb P F, Girshick R B, McAllester D, et al. Object detection with discriminatively trained part-based models[J].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32(9): 1627-1645.
[5]LeCun Y, Bottou L, Bengio Y, et al. Gradient-based learning applied to document recognition [J]. Proceedings of the IEEE,1998, 86(11): 2278-2324.
[6]Krizhevsky A, Sutskever I, Hinton G E. Imagenet classi fi cation with deep convolutional neural networks[C]//Advances in neural information processing systems. 2012: 1097-1105.
[7]Sermanet P, Kavukcuoglu K, Chintala S, et al. Pedestrian detection with unsupervised multi-stage feature learning[C]//IEEE Conference on Computer Vision and Pattern Recognition(CVPR), 2013: 3626-3633.
[8]Gu C, Lim J J, Arbeláez P, et al. Recognition using regions[C]//IEEE Conference on. IEEE on Computer Vision and Pattern Recognition, 2009. CVPR 2009: 1030-1037.
[9]李文辉. 航拍视频中运动目标的检测与跟踪算法研究[D].西安:西安电子科技大学,2014.
[10]王海地. 基于显著性检测和分类器训练的航拍图像车辆检测[D].北京:北京交通大学,2015.
[11]Jia Y, Shelhamer E, Donahue J, et al. Caffe: Convolutional architecture for fast feature embedding[C]//Proceedings of the ACM International Conference on Multimedia. ACM, 2014:675-678.
猜你喜欢
中国应急管理科学(2022年2期)2022-05-23
铁道机车车辆(2022年1期)2022-03-24
仪器仪表用户(2022年2期)2022-02-18
云南画报(2021年10期)2021-11-24
科技创新导报(2021年33期)2021-04-17
云南画报(2020年12期)2021-01-18
铁道学报(2020年8期)2020-09-07
铁道建筑技术(2019年6期)2019-11-29
小学生作文选刊·低年级版(2017年4期)2017-06-07
电子制作(2017年1期)2017-05-17
