浅谈神奇的柔顺领域
2018-03-28 07:44供稿王晶琳邱丽芳WANGJinglinQiuLifang
金属世界 2018年2期
供稿|王晶琳,邱丽芳 / WANG Jing-lin, Qiu Li-fang
提起柔顺领域,或许大家都有些陌生,但是实际上我们在日常生活中却频繁地和具有“柔顺”特点的物品打着交道。如图1所示,“百折不挠”的洗发液盖子、简单实用的折叠发夹、弹性十足的运动鞋底等都让我们享受着“柔顺”带来的便捷。它不再只是机械字典里的一个高冷词汇,而是在实际生活中随处可见的,并且往往能够通过屡次“变身”来显示“柔顺”的价值。与传统机械不同,柔顺机构是积极地利用机构中构件自身的弹性变形来完成运动和力的传递及转换的。
柔顺机构
自然界中很多生物都为“柔顺”的衍生发展带来了灵感。如图2所示,鸟类之所以能自由地飞翔,正是利用了翅膀的柔顺性。因此,柔顺机构在仿生领域也有着广阔的应用前景[1],可用来模仿自然界中生物的关节和肌肉等。例如仿壁虎机器人[2]、微型仿生扑翼飞行机器人[3]、微型仿生鱼[4]、微型机器蜜蜂[5]等。
尽管现代科学家对柔顺机构的研究历程并不悠久,但是早在远古时期柔顺机构便得到了应用。例如人类的狩猎活动利用的弓箭。弓箭作为一个简单的柔顺机构,能够将弓和弦的弹性变形转化成推动箭矢的动力,造成巨大的杀伤力,从而捕获大型猎物。随着时代变迁,柔顺机构开始以更多样的形式出现在人们的视野中,研究者已经将研究成果成功地应用于各种领域。
机械领域
剥线钳是一种用于剥去电线绝缘覆皮的手持工具,如图3所示。然而这种刚性结构的剥线钳却存在一些问题,例如成本较高、结构复杂、摩擦磨损等。由于剥线钳在运动过程中自由度会发生变化,因此将变胞变换的思想与柔顺五杆机构相结合,设计了一种新型的柔顺剥线机构。图4所示为聚丙烯加工的柔顺剥线机构样机剥离电线覆皮的过程。可以看出,转换得到的柔顺机构不仅结构形式得到了大大简化,零件数目有效减少,并且由于无需刚性运动副,从而妥善解决了机构的润滑问题,操作起来也十分方便[6]。

图1 “柔顺”在生活中的简单应用

图2 鸟的翅膀——柔顺性的展示

图3 常用剥线钳
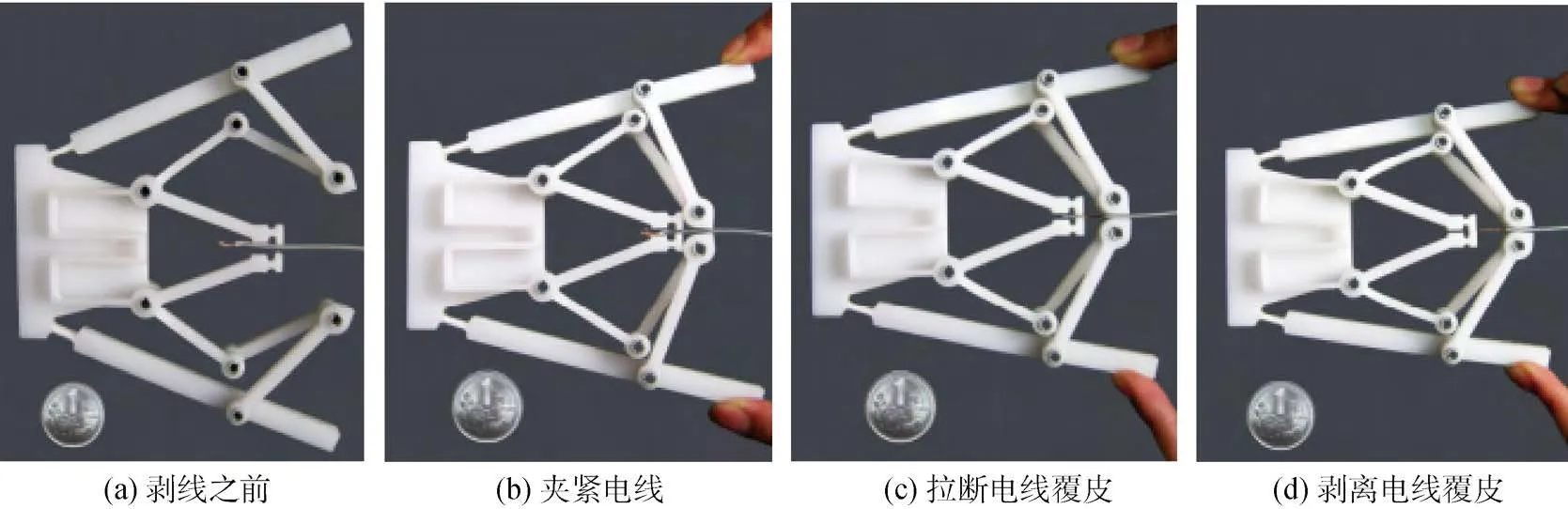
图4 聚丙烯柔顺剥线钳剥离电线覆皮的过程
航空领域
分布式全柔顺机构通过自身的机构变形可实现连续平滑的形状变化,并且能够使机构应力集中现象得到有效缓解,因此对自适应形状飞机机翼和柔顺天线放射器等需要形状变化的系统而言尤为适用。在实际中,为促进可控性的提升、减少能耗、简化结构,Kota教授和Kikuchi教授将柔顺机构应用到飞机机翼的设计中[7],如图5所示。

图5 试飞中的柔顺机翼
医学领域
目前对于外骨骼和肌肉的研究已经验证了提高柔顺性、耐磨性以及减轻整体重量的可行性。柔顺机构中的铰接多刚体系统为外骨骼设计提供了轻量级、刚度可调节的方案。在验证方案的过程中,为了更接近实际,研究人员引入了平行耦合柔顺板机构(Parallel Coupled Compliant Plate Mechanism,简称PCCP)以及松紧带弹簧机构(Pennate Elastic Band Spring,简称PEB)充当肌肉,这两种机构为用户提供了一定的膝关节刚度和柔度选择范围,并能进行自主调节,无需使用有源器件或有源传感器[8]。图6和图7分别为构建的弯曲模型以及膝关节在有肌肉和无肌肉两种情况下的实物样机。在这里,柔顺机构成为了柔顺膝关节假肢的重要设计构件。

图6 平行耦合柔顺板机构的梁弯曲模式与固定导向弯曲模式
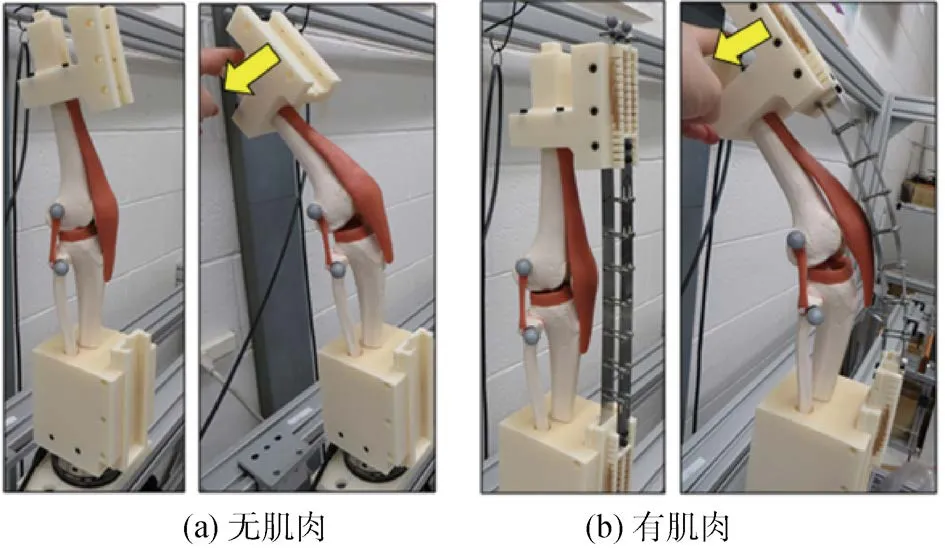
图7 骨模型测试
折纸机构
折纸艺术作为传统艺术之一,可以通过各种各样的折痕构造出不同的艺术构型,这使得由二维到三维的几何创造成为可能。折纸的折痕可以看作是纸张沿折痕轴刚度的减小,因而可等效为一个柔顺机构中的柔顺铰链,而纸张则被视为刚体[9]。
由此形成的折纸机构便是通过简单的元素组合以达到实现复杂的空间运动的目的。折纸灵感可以用于制作精美的艺术品。图8所示为一种纸雕贺卡,这样的纸面弹出机构,收起状态时如同一片信笺便于存放,对内部结构起到很好的保护作用,而在展开状态之下能够将侏罗纪时代的自然世界栩栩如生地展现出来。

图8 一种简单的纸雕贺卡[10]
除此之外,研究者还能够将数学抽象模型附加到折纸灵感之上形成相应的机械结构。如图9所示,Howell等研究出来的用于航空航天的可折展太阳能电池阵在非工作状态下可以折叠起来从而节省发射及运输成本,而进入太空指定位置后,折叠的太阳能电池阵可以迅速外延伸展,将太阳能转化为电能为航天器供电。
微机电系统
微/纳米技术重要的研究方向之一便是微机电系统(Micmelectmmechanical Systems,简称MEMS),这种智能微型装置集成了传感技术以及微电子控制技术。它的发展使得微尺度领域的研究又上升到了一个全新的层次[11]。MEMS系统主要包括微型传感器、执行器、微处理电路、微能源四部分。这一系统可以采用光、电、磁等多种方式与外界达成通信联系,并显示相应的输出信号,另外也能够与其他系统协同工作构成一个更完整的系统[12]。
微电子学制造领域的飞速发展促进了MEMS研究的进步,它将普通芯片的机械可动结构和电气特性有机结合起来,进行批量生产,大大降低了成本,并且微电子器件的灵敏度也得到了提高[13]。MEMS的研究中,除机械技术外,还交叉融合了包括材料科学、生物医学、化学、物理学、电子技术等在内的多个学科技术,有着十分广阔的应用前景。
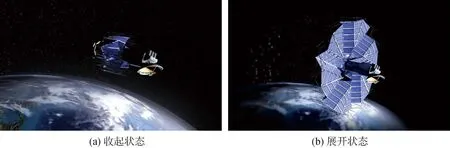
图9 可折展太阳能电池阵
目前,科学家正尝试将全柔顺机构应用在MEMS产品中,这样不仅可以解决传统机构中的间隙与摩擦等问题,而且也保证了精度,减少了装配时间,节约了装配成本,对于MEMS设计起着举足轻重的作用[14]。
与传统意义上的产品相比,非线性表面力会对MEMS产品的性能产生影响,这是过度追求尺寸效应所带来的负面效果。为了弥补这一不足,可以采用柔顺机构的设计思想,积极利用它的双稳态特性和定常力特性。杨百翰大学研制出的各种微型开关、微型阀等机构都是双稳态特性应用的实例[15]。如图10所示,宾夕法尼亚大学的Ananthasuresh教授还设计出了一些微型夹钳[16]。图11是一种微型机器人。

图10 微型夹钳
基于MEMS开发的微型武器,与传统武器相比,具有小型、不易被发现和行动灵活的特点。图12所示为佛罗里达大学研究过的一种固定薄膜翼微飞行器[17],在这种飞行器上搭载一些微型侦查设备就能够更稳隐蔽地执行侦查和攻击任务。

图11 一种微型机器人

图12 固定薄膜翼微飞行器
LET柔顺铰链
人体的运动是依靠膝关节、腕关节以及肘关节等通过转动实现的,并且它们还起到了连接四肢的作用,而在柔顺机构中,铰链的地位和这些关节是非常相似的,除了连接机构之外,它们还可以实现弯曲、扭转等功能。在某些特定的场合,仅仅是无需润滑这一特点,柔顺铰链被看作是刚性铰链的完美替身。
由于柔顺铰链有着众多结构和许多工程应用上的优点,因此,近年来不仅仅是微观领域,就连宏观领域也展开了一系列与之相关的探索,并取得了丰硕的成果,如:支撑机构、联接结构、微调整机构、光学平台、微定位和微位移等。平面折展机构中的扭转铰链(Lamina Emergent Torsional Joint,简称LET)是柔顺铰链的一种。图13所示为几种LET铰链,包括:外LET、内LET、扭转平行铰链、扭转平行弯曲铰链[18]。

图13 几种LET铰链
设计带有柔顺铰链的机构的挑战在于,找到能够完成所需变形特征以及提供合适运动范围的铰链[19]。图14所示为一个简单的四杆机构,其中便应用了外LET铰链。

图14 柔顺四杆机构
除上述应用之外,平面折展机构(Lamina Emergent Mechanisms,简称LEMs)也是柔顺机构中具有代表意义的结构形式,它由薄板加工而成能够实现平面外运动,兼具了柔顺机构、平面正交机构及变胞机构的优点,能够实现简单运动,如四杆机构、曲柄滑块机构等,还能实现复杂运动,如球形四杆机构、斯蒂芬森机构等。图15为空间球面LEMs,其中(a)为该空间球面LEMs的平面状态,(b)为其运动状态[20]。
其实,设计柔顺铰链的最终目的就是借助它的变形来让机构更好地实现一系列复杂的运动,而柔顺铰链不仅仅可以在柔顺机构中发挥巨大作用,相关的研究成果也可以被应用在我们的生活之中。如图16所示是一种以万花筒构型为启发设计的柔顺四面体环,各旋转体之间采用内LET铰链连接,在旋转的过程中可以借助铰链的变形来储存能量,形成多种多样的立体形状[21]。
另外,如图17所示,串联多个外LET阵列并沿着圆滑弧线排列,依靠铰链的翻转和弯曲变形设计出了人形工艺品,作为立体摆件不仅简单大方,又具有观赏性。

图15 空间球面LEMs的不同状态

图16 柔顺万花筒
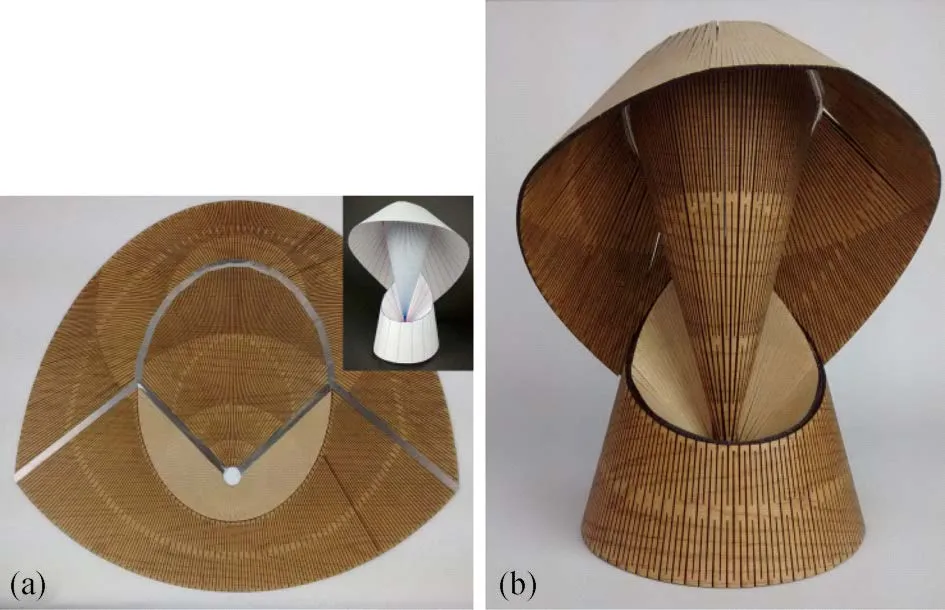
图17 立体摆件[22]
结束语
综上所述,我们可以发现“柔顺”总是能够通过各种各样的形式完成变身。其实,柔顺领域的奥妙不仅仅局限于此,我们的日常生活都受益于它的万般变化。相信经过研究人员的不断探索和研究,更多柔顺领域的宝藏会被发掘出来。希望与柔顺相关的一系列研究成果能为我们的生活带来翻天覆地的变化,造福于人类!
[1] 黄则兵,葛文杰,马利娥. 柔顺机构的研究现状及其在仿生领域的应用. 机械设计与研究,2004(增刊):279
[2] 王田苗,孟偲,官胜国,等. 柔顺杆连接的仿壁虎机器人结构设计. 机械工程学报,2009,45(10):1
[3] 于冰. 微型仿生扑翼飞行机器人飞行机理和控制方案研究[学位论文]. 南京:东南大学,2006
[4] 曹静文,赵宁. 基于压电双晶片驱动的微型仿生机器鱼的设计. 机械制造,2010 (8):25
[5] 孝文. 美研制微型机器蜜蜂:高度仅2.4 mm. 中国日报,2012-2-23
[6] 达选祥,勾燕洁,陈贵敏.一种基于变胞变换的柔顺剥线钳. 机械工程学报,2015,51(1):69
[7] Kota S,Ananthasyresh G K,Grary S B,et al. Design and fabrication of micro-electro-mechanical systems. Journal of Mechanical Design,1994,116:1081
[8] Jun S,Zhou X,Dan K R,et al. Smart knee brace design with parallel coupled compliant plate (PCCP) mechanism and pennate elastic band (PEB) spring. Journal of Mechanisms & Robotics,2015(7):1024
[9] Demaine E D. Folding and unfolding linkages,paper,and polyhedra// Revised Papers from the Japanese Conference on Discrete and Computational Geometry. Springer-Verlag,2000:113
[10] Sabuda R,Reinhart M. Dinosaurs:Encyclopedia Prehistorica.Walker Books LTD,2005
[11] 高世桥,曲大成. 微机电系统(MEMS)技术的研究与应用. 科技导报,2004,22(4):17
[12] 张威,张大成,王阳元. MEMS概况及发展趋势. 微纳电子技术,2002,39(1):22
[13] 冯帆. 微机电系统的发展与应用. 科技创新与应用,2015(19):117[14] 于靖军,宗光华,毕树生. 全柔顺机构与MEMS. 光学精密工程,2001,9(1):1
[15] Howell L L. Compliant Mechanisms. New York:John Wiley & Sons Inc,2001
[16] Ananthasuresh G K. Optimal Synthesis Methods for MEMS. Boston:Kluwer Academic Publishers,2003
[17] Stanford B,Ifju P,Albertani R,et al. Fixed membrane wings for micro air vehicles:experimental characterization,numerical modeling,and tailoring. Progress in Aerospace Sciences,2008,44(4):258
[18] Delimont I L,Magleby S P,Howell L L. A family of dual-segment compliant joints suitable for use as surrogate folds. Journal of Mechanical Design,2015,137(9)
[19] Jacobsen J O,Chen G,Howell L L,et al. Lamina Emergent Torsional (LET) Joint. Mechanism & Machine Theory,2009,44(11):2098
[20] Magleby S P,Jacobsen J O,Howell L L. Fundamental components for lamina emergent mechanisms// ASME International Mechanical Engineering Congress and Exposition. 2007.
[21] Safsten C,Fillmore T,Logan A,et al. Analyzing the stability properties of kaleidocycles. Journal of Applied Mechanics,2016,83(5):051001
[22] Nelson T G,Lang R J,Pehrson N A,et al. Facilitating deployable mechanisms and structures via developable lamina emergent arrays.Journal of Mechanisms & Robotics,2016,8(3):31006
猜你喜欢
计算机世界(2020年50期)2020-01-15
青年生活(2019年23期)2019-09-10
民用飞机设计与研究(2019年2期)2019-08-05
北京汽车(2019年6期)2019-02-12
汽车电器(2018年10期)2018-11-01
阅读与作文(小学高年级版)(2016年6期)2016-11-14
娃娃画报(2016年9期)2016-11-12
阅读与作文(小学高年级版)(2016年10期)2016-10-12
小学生导刊(低年级)(2016年6期)2016-07-02
中共南宁市委党校学报(2015年4期)2015-02-28