结合自适应梯度分类匹配的改进Criminisi图像修复算法
2018-03-27 01:28:00张从飞邵利平
小型微型计算机系统 2018年2期
张从飞,邵利平,师 军
(陕西师范大学 计算机科学学院,西安 710119)
1 引 言
图像修复是对图像破损区域修复重建或信息填充,使修复后图像满足一定视觉质量,在文物保护、图像复原、目标障碍物剔除以及高分辨率图像再现上有着重要应用价值.
基于变分PDE和纹理合成的图像修复技术是2类主要的图像修复策略.其中,变分PDE图像修复技术本质是一种偏微分方程(partial differential equation,PDE)修复算法[1-3],主要思想是利用物理学热扩散方程将待修补区域周围信息传播到待修补区域,这类方法能很好地保留图像线性结构,在小尺度破损图像修复上有较好的修复效果,但对大范围破损或富纹理缺失区域修复质量则整体较差.
针对以上问题,基于纹理合成的图像修复方法被广泛提出,其中典型的方法是Criminisi图像修复算法[4].Criminisi算法主要由修复区域优先权计算、修补块全局匹配搜索和匹配块填充3步组成,其主体思想是从待修补区域边界上选取修复优先权最高点,以该点为中心建立待修补块,利用待修补块已知信息在已知区域(含已修补区域)内寻找与该块纹理最接近的块,利用块内已知信息来对待修补块中未知信息进行填充.尽管该算法能够对大范围缺失信息图像产生较好修复质量,但依然存在很多不足:①优先权模型中置信项在多次迭代后急剧下降趋于零值,而数据项保持平稳变化,使得数据项受制于趋于零值的置信项,优先权计算不再可靠,导致错误填充顺序;②在修复时并未对待修补块信息进行具体分析,易将纹理部分误认为边缘部分而出现纹理延伸;③在图像已知信息区域(含已修补区域)寻找合适匹配块会带来高昂匹配代价.
针对Criminisi算法优先权模型设计不合理导致错误填充顺序问题,文献[5,6]在优先权模型[4]上附加结构信息增益项.文献[7]将优先权模型[4]修正为加法模型,并对数据项和引入伸缩因子的置信项赋予简单权重.为保持优先权模型置信项和数据项平衡,文献[8]给出了基于伸缩因子的改进置信项和数据项优先权模型.结合文献[7]工作,文献[9]给出了数据项与改进置信项乘积的优先权模型来避免置信项为0时优先权趋近于0.文献[10]引入补偿因子和加权系数根据整幅图像纹理结构信息来动态调节补偿因子和加权系数,使得不同图像对应于不同优先权模型.文献[11]将置信项改为指数函数形式并根据图像结构纹理信息来人为选取权重因子控制置信项与数据项比例.以上文献[5-11]是通过引入不同控制参数来对优先权模型[4]中置信项和数据项进行加权调控,但仅能起到有限的调控作用,且在调控时未对图像中边缘和纹理进行仔细区分,易导致属于纹理部分的图像块优先修复,造成纹理延伸并影响图像修复质量.
为避免Criminisi算法纹理延伸问题,文献[12,13]对待修补块采用均值差和方差差值两个因素来进行纹理边缘区分,但采用的方法是将待修补块已知信息按法线方向分割成两块,可能会导致分割后信息量不等从而降低计算准度.同时文献[12,13]也未对图像已知区域内所有信息进行仔细划分,因此依然无法有效地解决纹理延伸问题.
为缓解Criminisi算法全局搜索匹配导致的高昂匹配计算代价,文献[12,14]通过减少和限定匹配块搜索空间来提高搜索效率,但简单搜索空间限制,会导致合理匹配块丢失,若设定搜索空间或约束距离过大,则所述策略依然趋于全局匹配,所能缓解的计算代价十分有限.文献[12,13]尽管试图通过均值差和方差差值两个因素来对图像待修补块进行纹理边缘区分,但在匹配最佳目标块时并没有对待修补块进行分类搜索,因此依然不能有效缓解计算代价.
为提高匹配准度,文献[15]引入待修补像素熵来改进相似度计算方法,利用结构相似性来搜索与待修补块差异最小的目标块;文献[16]引入距离修正因子,将待修补块与目标块几何距离引入到相似性度量函数中,在搜索目标块时首先通过欧式距离相似性函数找出3个目标块,然后根据几何距离修正因子来找出最佳匹配块.
但以上文献[15,16]同文献[4-14]都是将更新后已知区域作为待修补块与目标匹配块搜索区域,随着修复过程不断进行,新更新已知区域可靠性不断下降,不仅增加了块匹配计算代价也降低了修复质量.
同以上文献不同,本文给出一种结合自适应梯度分块的改进Criminisi图像修复算法.所提方法首先对待修补图像的已知和待修补区域进行标记,对落入已知区域的所有像素计算梯度直方图并自适应地划分为平滑、纹理和边缘3种类型,采用优先权系数自适应加权策略,避免了文献[5-11]人为设定优先权权重和手动选择不同优先权计算模型所导致的低效率和无法进行自适应的优先权计算.其次,所提方法结合基于块分类的改进优先权函数来增强对边缘纹理部分的辨别能力,避免了文献[12,13]通过实验阈值采用均值差和方差差值对边缘和纹理进行强制划分的低效率.再次,同文献[12-14]不同,所提方法通过建立自适应块大小函数来保证不同类型块按不同块大小修复,并且只在对应类型中进行匹配来提高匹配效率.最后,同文献[4-16]不同,所提方法在修复过程中不更新已知区域,在避免修复误差传递的同时也减少了计算代价.
2 Criminisi算法及其改进算法


图1 Criminisi算法修复过程Fig.1 Processing of Criminisi algorithm
在Criminisi算法中,边界点p的优先权P(p)被定义为式(1)所示的乘积模型,用于保证具有较多已知信息和较强结构信息的待修补块被优先修复.
P(p)=C(p) ·D(p)
(1)
式(1)中,C(p)为置信项,表示ψp中已知信息所占比例,D(p)为数据项,表示等照度线和法线方向余弦夹角,C(p)和D(p)具体定义如式(2)和式(3)所示:

(2)

(3)

(4)
(5)
(6)
Criminisi算法反复执行式(1)~(6),直至Φ=I,即完成最终修复.但在式(1)中,优先权P(p)等价为C(p)和D(p)乘积会导致2个问题:①当p点等照度线与法线趋于垂直时,D(p)趋近于0导致优先权不可靠;②C(p)在多次迭代后急剧下降,而D(p)保持平稳变化,会导致D(p)在P(p)计算中贡献率下降,同样使得优先权不可靠.基于此,文献[5,6]在文献[4]乘积模型上附加了结构信息增益项,使得当C(p)趋于0时,只考虑D(p),如式(7)所示,其中n为结构信息增益因子,文献[6]中取n=7.
P(p)=C(p)D(p)+n·D(p)
(7)
为避免D(p)或C(p)趋于0时,P(p)趋近于0,文献[7]引入加法模型,采用权重因子α和β来对引入伸缩因子ω的C(p)以及D(p)权重进行调控,如式(8)所示:
P(p)=α((1-ω)C(p)+ω)+βD(p),0≤α,β≤1
(8)
结合文献[7]加法模型,文献[10]给出了基于补偿因子和加权系数的优先权计算模型,如式(9)所示:
P(p)=(C(p)+α)+(γ×D(p))
(9)
式(9)中,α为补偿因子,γ是加权系数.
式(7)、式(8)和式(9)本质出发点是通过引入不同参数来对C(p)和D(p)进行加权,从而对式(1)起到一定调控作用,但所能起到的调控作用十分有限.同时文献[5-11]均未对图像边缘和纹理进行仔细区分,易导致属于纹理部分的图像块被优先修复从而造成纹理延伸.

(10)
(11)
文献[14]尽管通过式(10)对搜索空间进行限制提高了计算效率,但所能缓解的匹配代价十分有限.
同以上文献不同,本文依据Otsu阈值分割法,将已知区域所有像素点按梯度直方图细分为纹理、边缘和平滑区域.为避免Criminisi算法优先权计算模型不合理,本文提出了结合块分类的改进优先权函数来增强对边缘纹理部分的辨别能力,从而有效地避免纹理延伸.Criminisi算法在已修补区域寻找合适的匹配块会导致高昂匹配计算代价[4],针对此问题,本文建立自适应块大小函数来保证不同类型块采用不同大小块修复,并且只在初始已知区域对应类型块中进行匹配来提高匹配效率和避免使用可靠性不断下降的新增已知区域.
3 基于Otsu阈值分割和梯度直方图的已知像素和图像待修补区域分类策略
考虑到图像梯度信息可很好地反映出图像像素变化,一般梯度变化剧烈的像素往往位于图像分割边缘,梯度变化相对缓慢的区域则对应图像平滑区域,而介于两者之间的像素梯度信息则对应于图像纹理变化区域,这里可对图像已知区域所有像素进行梯度统计,通过梯度直方图来确定图像边缘、纹理和平滑像素,对图像已知区域像素纹理、边缘和平滑区域划分,也避免了文献[12,13]仅对含有缺失信息的待修补块进行边缘、纹理和平滑细分所导致的计算不准确.
Otsu法被认为是分割阈值自动选取的最优方法,其基本思想是通过类间方差最大值来确定最佳分割阈值.因此本文引入Otsu法来提高分割阈值的计算准度,并且Otsu法分割阈值可针对不同类型图像进行自适应地调整.
记G=(gi,j)m×n为待修补图像A=(ai,j)m×n的梯度图,将G初始化为(-1)m×n,B=(bi,j)m×n为标记矩阵,其中bi,j=1对应为已知区域Φ,bi,j=0对应为待修补区域Ω,记Φ′为已修复区域,初始化Φ′=Φ.
对∀ai,j∈Φ,可按式(12)计算ai,j的梯度值gi,j:

(12)
式(12)中,gx和gy分别是ai,j的x和y方向梯度,其计算方法如式(13)和式(14)所示:
gx=ai,j+1-ai,j-1
(13)
gy=ai+1,j-ai-1,j
(14)
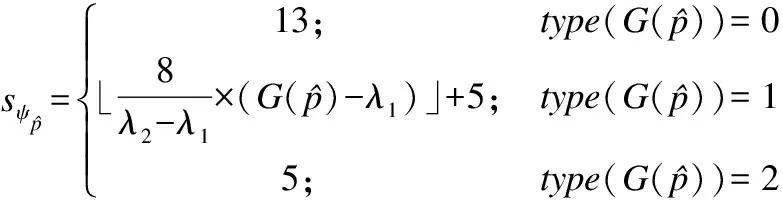
式(13)和式(14)中,若∃ax,y∈{ai,j+1,ai,j-1,ai-1,j,ai+1,j}且ax,y∈Ω,即bx,y=0,即存在不在Φ中像素ax,y,则用ai,j替代ax,y,从而保证每个像素ai,j∈Φ在G中都有梯度值并按式(15)划分为3种类型:

(15)
式(15)中,type(k)=0,1,2对应为平滑、纹理和边缘区域,λ1和λ2对应为分割阈值且满足0≤λ1≤λ2≤L-1,其中L为Φ中像素梯度阶数.


(16)
式(16)中,λ为分割阈值,λbegin,λend分别为起始和终止梯度阶,hk为第k阶梯度阶出现频次,Pk为Φ中第k阶梯度阶出现概率,如式(17)所示;upart1,upart2,utotal分别对应为梯度区间[λbegin,λ],[λ,λend],[λbegin,λend]梯度阶期望,按式(18)、式(19)和式(20)进行计算.
(17)
(18)
(19)
(20)
将λbegin=h0,λend=hL-1代入式(16),可确定分割阈值λ1,将λbegin=λ1+1,λend=hL-1代入式(16),可确定分割阈值λ2,而待修补块梯度则可按式(21)确定:
(21)
式(21)中,q为待修补块ψp落入已修补区域Φ′的坐标,aq为A中对应像素.由式(21)可对待修补块梯度进行估计,然后按式(15)确定待修补块类型.结合待修补块梯度信息和块类型还可自适应地选择优先权计算策略和设定图像在已知区域搜索范围,从而进一步提高修复准度和降低搜索匹配代价.
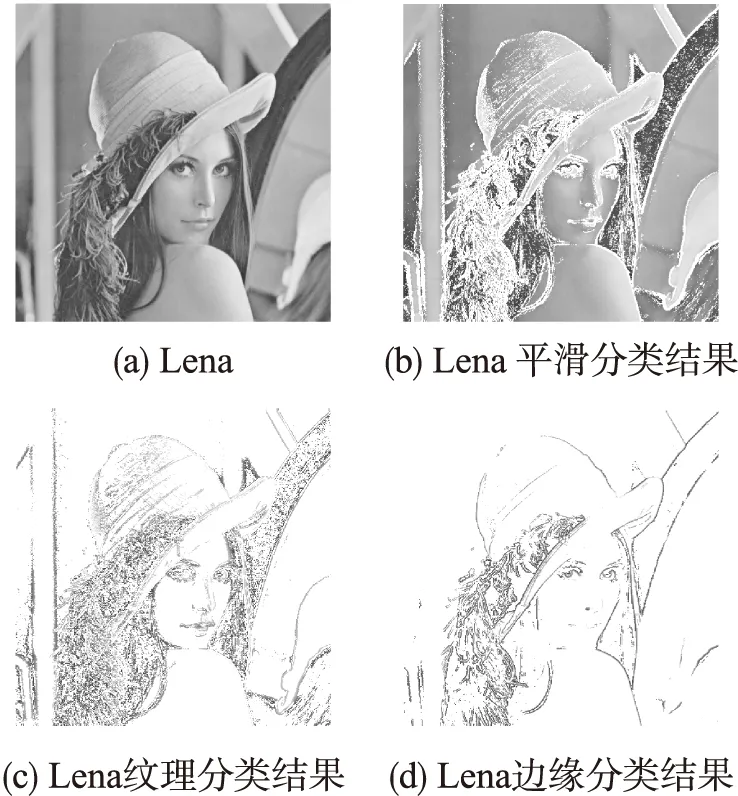
图2 分类结果图Fig.2 Classification results
图2是对分辨率为512×512灰度测试图像Lena按梯度分类策略进行平滑、纹理和边缘分类结果.从图2可看出,梯度分类策略可较好地把原图分为平滑、纹理和边缘3类.
4 结合梯度的改进优先权计算策略和初始已知区域分类匹配策略
考虑到梯度可作为纹理复杂程度的有效度量手段,当待补块处于边缘区域时,图像信息变化比较强烈,此时梯度项处于绝对支配地位,而当待补块处于近似平滑区域,此时梯度项趋近于0,而置信项处于绝对支配地位,因此可将优先权修正为式(22)并通过式(23)来确定权重α.
P(p)=αC(p)+(1-α)G(p)
(22)

(23)
由于直接确定不同梯度值下权重α非常困难,因此式(23)首先确定边界权重:即当G(p)=0,对应为梯度值最小情况,此时仅考虑C(p),因此α=1,而当G(p)=L-1时,即梯度值最大情况,此时仅考虑G(p),因此α=0,而当G(p)∈(0,L-1)时对应的权重系数,则由α=1和α=0的情况线性插值出来.因此改进优先权函数能自适应根据梯度信息改变优先权模型权重因子,增强边缘纹理辨别能力,提高优先权计算可靠性.
Criminisi算法通常采用固定大小的待修补块,但采用不同大小块会导致不同修复结果.图3是对分辨率为213×284的测试图像Bw采用Criminisi修复算法并设定不同大小块进行修复的实验结果.
从图3结果可看出由于标准Criminisi算法[4]优先权定义为置信项与数据项乘积,而采取不同大小块会影响待修补图像边界点置信项大小,即样本块中已知信息所占比例,从而导致图像修复时优先权顺序改变,进而影响图像视觉修复质量.

图3 采用不同大小块的标准Criminisi算法修复结果Fig.3 Standard Criminisi algorithm inpainting results with different block sizes

(24)
(25)
5 结合自适应梯度分块的改进Criminisi图像修复算法
结合第2节和第3节所完成工作,以下给出完整的结合自适应梯度分块的改进Criminisi图像修复算法.
第1步.对∀ai,j∈Φ,按式(12)计算Φ内所有图像像素点ai,j对应的梯度值gi,j;
第2步.将Φ中所有像素梯度值按式(16)采用Otsu阈值分割方法分割得到两个阈值λ1和λ2;
第3步.将Φ中所有像素梯度根据阈值λ1和λ2按式(15)划分为3种类型:平滑、边缘和纹理;


第8步.反复执行第4步~第7步,直到图像中待修补区域Ω中所有像素点修复完毕,即B=(bi,j)m×n中所有元素都调整成bi,j=1,修复结束.
在上述算法中,步骤1~步骤3用于将待修补图像已知区域像素按Otsu法自适应地划分为平滑、纹理和边缘3种类型.步骤4用于对待修补块梯度估计并自适应地根据置信项和梯度项权重来确定优先权最大的边界像素点,从而相对于文献[4-11]未进行分类估计以及文献[12,13]仅依据待修补块信息进行不同区域细分提高了分类可靠性,同时依据不同区域自适应地计算优先权,增强了对图像边缘纹理部分的辨别能力,从而避免了文献[4-13]存在的纹理延伸问题.步骤5~步骤7用于对待修补块仅在初始已知区域中进行搜索匹配填充并依据待修补块类型来自适应地确定块大小,避免了使用可靠性不断下降的已修补区域[4-11]和避免简单搜索空间限制导致的合理匹配块丢失[12-14]以及全局搜索所带来的高昂计算代价[12-16].
6 实 验
以下通过4个实验:①结构图像修复对比实验、②小尺度样本缺失修复对比实验、③大尺度样本缺失修复对比实验、④时间代价对比实验来对所提算法性能进行检验并与文献[4,8,11,13,16]进行实验对比.由于文献[4,8,11,13,16]都采用固定大小块进行修复,为便于比较,将待修补块统一为7×7,其他参数都采用对应文献默认参数.实验中,采用的测试环境为Window10,CPU为Intel(R) Core(TM) i5-6600 4核CPU,单处理核心主频3.30GHz,内存为8.00GB,实验编码语言为JAVA.实验中使用PSNR来衡量视觉质量,按式(26)计算:
(26)

(27)
6.1 结构图像修复对比实验
为验证所提算法在结构图像上的修复性能,对分辨率为213×284的图像Bw按文献[4,8,11,13,16]所提策略和本文所述策略进行修复,修复结果如图4所示.
从图4可看出:Criminisi算法采用优先权乘积模型,置信项和数据项多次迭代会导致优先权趋近于0,使得即使数据项很大也得不到优先修复,因此图4(c)存在明显线性结构失真;文献[8,11]结合数据项权重因子提高周围结构丰富像素优先权,因此图4(d)-图4(e)相比于Criminisi算法有了一定提高,但仍然存在小块纹理延伸;由图4(f)-图4(h)可看出,文献[13,16]和本文所述策略在结构图像修复上具有较好修复质量,但整体性能差异不大,其中文献[13]和本文所述策略都可对图4(a)进行完整恢复,而文献[16]相对于文献[13]和本文所述策略存在少许偏差.因此引入图像待修补块平滑、纹理和边缘分块将有助于减少纹理延伸和提高修复可靠性.

图4 结构图像Bw修复结果Fig.4 Bw structure image inpainting results
6.2 小尺度样本缺失修复对比实验
为验证所提算法在小尺度样本缺失图像修复上的性能,对分辨率为256×256的Lena测试图像进行随机擦除,然后按文献[4,8,11,13,16]和本文所述策略进行修复,实验结果如图5所示.

图5 Lena小尺度样本缺失修复结果Fig.5 Lena small scale sample missing inpainting results
由图5可看出,标准Criminisi算法[4]在Lena图像脸部缺失区域修复时产生一定纹理延伸,同时在帽子以及图像右下角缺失区域存在明显误匹配现象(图5(c));从图5(d)-图5(g)可看出改进算法[8,11,13,16]对于强边缘区域相比于Criminisi算法有一定提高,但对于头发缺失区域存在纹理延伸问题,而本文算法则较好克服了上述问题,对于图像边缘和纹理区域都有着较好的图像修复结果.
6.3 大尺度样本缺失修复对比实验
为验证所提算法在大尺度样本缺失图像修复性能,对分辨率为206×308的Bungee测试图像和362×362 Truck测试图像进行大范围擦除,然后按文献[4,8,11,13,16]和本文策略进行修复,其实验结果如图6和图7所示.

图6 Bungee大尺度样本缺失修复结果Fig.6 Bungee large scale samples missing inpainting results
从图6可看出,文献[4]在河边区域存在明显纹理延伸(图6(c));文献[11,13]在房子缺失区域存在断裂(图6(e)-图6(f));文献[16]在房子顶部区域存在瓦块延伸(图6(g));以上修复结果在房子周围或河边都存在明显纹理延伸或结构断裂问题;文献[8]在对图6(b)缺失区域修复表现出了较好地修复性能,本文算法则稍逊于文献[8]修复结果,但依然能较好地保持整体结构性.从图7可看出,由于置信项和数据项权重分配不合理,导致文献[4,8,11,13,16]在修复过程中道路出现大范围纹理延伸(图7(c)-图7(h)).而本文算法结合自适应分类策略可有效地调控置信项和梯度项权重,更好地解决纹理延伸问题,相比于文献[4,8,11,13,16]道路上的纹理延伸明显减少,提高了修复视觉质量.

图7 Truck大尺度样本缺失修复结果对比实验Fig.7 Truck large scale samples inpainting results
6.4 时间代价对比实验
为验证所提算法在时间处理代价上性能,对实验6.1-6.3所进行的修复实验连续进行10次,统计其平均处理时间代价,如表1所示.其中表1为结构图像样本缺失图像修复时间代价对比数据,单位为S(秒).
从表1实验结果可看出,本文所提策略由于在匹配时仅根据待修补块块类型在对应块区域中进行匹配搜索,在简单结构图像,小尺度样本缺失图像以及大尺度样本缺失图像修复上比文献[4,8,11,13,16]计算效率上有了很大提高,具有最小的时间处理代价.
表1 修复时间代价对比实验
Table 1 Inpainting time cost comparative experiments

修复策略修复平均耗时(S)图4b图5b图6b图7b文献[4]221332234文献[8]211130220文献[11]201231215文献[13]221229223文献[16]211132230所提策略1071782
以上实验表明,本文所述策略相对于文献[4,8,11,13,16]具有较好修复性能且整体修复结果较为稳定可靠,同时由于仅根据待修补块块类型在对应块区域内匹配搜索,具有最小的时间处理代价.
7 结束语
以上本文给出了一种结合自适应梯度分类的改进Criminisi图像修复算法.所提算法对待修补图像落入已知区域所有像素按梯度直方图划分为平滑、纹理和边缘3种类型从而避免了文献[12,13]单纯依赖待修补块已知信息和使用手动设定阈值对待修补块进行纹理、边缘和平滑细分所导致的计算不准确.所提方法结合块分类自适应优先权计算函数增强了对边缘纹理部分的辨别能力克服了传统Criminisi图像修复算法[4-13]存在的纹理延伸问题.所提算法对待修补块仅在初始已知区域进行搜索匹配填充并依据待修补块类型来自适应地确定块大小,从而避免了使用可靠性不断下降的已修补区域[4-11]和避免简单搜索空间限制导致的合理匹配块丢失[12-14]以及全局搜索所带来的高昂计算代价[12-16].实验表明所提方法可较好地克服纹理延伸,时间复杂度高等问题,同现有Criminisi算法及其改进算法相比,在降低时间复杂度的同时也进一步提高了图像修复质量.
[1] Bertalmio M,Sapiro G,Caselles V,et al.Image inpainting[C].Proceedings of the International Conference on Computer Graphics and Interactive Techniques,2000:417-424.
[2] Chan T F,Shen J.Mathematical models for local nontexture inpaintings[J].SIAM Journal on Applied Mathematics,2002,62(3):1019-1043.
[3] Chan T F,Shen J.Nontexture inpainting by curvature-driven diffusions[J].Journal of Visual Communication & Image Representation,2001,12(4):436-449.
[4] Criminisi A,Perez P,Toyama K.Region filling and object removal by exemplar-based image inpainting.[J].IEEE Transactions on Image Processing,2004,13(9):1200-1212.
[5] Zhou Y,Li L,Xia K.Research on weighted priority of exemplar-based image inpainting[J].Journal of Electronics(China),2012,29(1-2):166-170.
[6] Nan A,Xi X.An improved Criminisi algorithm based on a new priority function and updating confidence[C].Biomedical Engineering and Informatics (BMEI),2014 7th International Conference on.IEEE,2015:885-889.
[7] Cheng W H,Hsieh C W,Lin S K,et al.Robust algorithm for exemplar-based image inpainting[C].The International Conference on Computer Graphics,Imaging and Vision (CGIV 2005),2005:64-69.
[8] Liang Shu-fen,Guo Min,Liang Xiang-qun.Enhanced Criminisi algorithm of digital image inpainting technology[J].Computer Engineering and Design,2016,37(5):1314-1345.
[9] Wang J,Lu K,Pan D,et al.Robust object removal with an exemplar-based image inpainting approach[J].Neurocomputing,2014,123(S1):150-155.
[10] Lin Yun-li,Zhao Jun-hong,Zhu Xue-feng,et al.An improved algorithm for image inpainting based on texture synthesis[J].Computer Applications and Software,2010,27(10):11-12.
[11] Liu Ye-fei,Wang Fu-long,Xi Xiang-yan,et al.Improved algorithm for image inpainting based on texture synthesis.[J].Journal of Chinese Computer Systems,2014,35(12):2754-2758.
[12] Ren Shu,Tang Xiang-hong,Kang Jia-lun.Improved Criminisi algorithm with the texture and edge features[J].Journal of Image and Graphics,2012,17(9):1085-1091.
[13] Ren Shu,Tang Xiang-hong,Kang Jia-lun.An image inpainting algorithm combined with texture edge features[J].Journal of Computer-Aided Design & Computer Graphics,2013,25(11):1682-1693.
[14] Dai Shi-mei,Zhang Hong-ying,Zeng Chao.A fast algorithm of exemplar based image completion[J].Microcomputer and its Applications,2010,29(22):34-36.
[15] Vantigodi S,Babu R V.Entropy constrained exemplar-based image inpainting[C].Signal Processing and Communications (SPCOM),2014 International Conference on.IEEE,2014:1-5.
[16] Wang Xin-nian,Wang Zhe,Wang Yan.Improved Criminisi algorithm based on geometry distance[J].Computer Engineering and Design,2015,36(7):1835-1839.
[17] Wu Ya-dong,Zhang Hong-ying,Wu Bin.Digital image inpainting techniques[M].Beijing:Science Press,2010.
[18] Zhang Hong-ying.Research and application on digital image impainting[D].Chengdu:University of Electronic Science and Technology,2006.
[19] Xu Z,Sun J.Image inpainting by patch propagation using patch sparsity[J].IEEE Transactions on Image Processing,2010,19(5):1153-1165.
[20] Fan Q,Zhang L F,Hu X L.Exemplar-based image inpainting algorithm using adaptive sample and candidate patch system[C].12th IEEE International Conference on Electronic Measurement & Instruments (ICEMI),IEEE,2015.
[21] Liu Y,Liu C J,Zou H L.A novel exemplar-based image inpainting algorithm[C].International Conference on Intelligent Networking and Collaborative Systems(INCOS),2015:86-90.
[22] Li Hua-qiang,Yu Qing-cang,Fang Mei.Application of otsu thresholding method on canny operator[J].Computer Engineering and Design,2008,29(9):2297-2299.
[23] Jothi J A A,Rajam V M A.Effective segmentation and classification of thyroid histopathology images[J].Applied Soft Computing,2016,46:652-664.
附中文参考文献:
[8] 梁淑芬,郭 敏,梁湘群.改进的Criminisi算法的数字图像修复技术[J].计算机工程与设计,2016,37(5):1314-1345.
[10] 林云莉,赵俊红,朱学峰,等.改进的纹理合成图像修复算法[J].计算机应用与软件,2010,27(10):11-12.
[11] 刘业妃,王福龙,奚祥艳,等.改进的Criminisi图像修复算法[J].小型微型计算机系统,2014,35(12):2754-2758.
[12] 任 澍,唐向宏,康佳伦.利用纹理和边缘特征的Criminisi改进算法[J].中国图象图形学报,2012,17(9):1085-1091.
[13] 任 澍,唐向宏,康佳伦.纹理和边缘特征相结合的图像修复算法[J].计算机辅助设计与图形学学报,2013,25(11):1682-1693.
[14] 代仕梅,张红英,曾 超.一种基于样例的快速图像修复算法[J].微型机与应用,2010,29(22):34-36.
[16] 王新年,王 哲,王 演.基于几何距离的Criminisi图像修复算法[J].计算机工程与设计,2015,36(7):1835-1839.
[17] 吴亚东,张红英,吴 斌.数字图像修复技术[M].北京:科学出版社,2010.
[18] 张红英.数字图像修复技术的研究与应用[D].成都:电子科技大学,2006.
[22] 李华强,喻擎苍,方 玫.Canny算子中Otsu阈值分割法的运用[J].计算机工程与设计,2008,29(9):2297-2299.
猜你喜欢
中国毕业后医学教育(2021年3期)2021-12-02 02:24:20
中国毕业后医学教育(2021年3期)2021-12-02 02:24:18
陶瓷学报(2021年2期)2021-07-21 08:34:58
软件(2020年3期)2020-04-20 01:45:18
西部论丛(2019年25期)2019-10-21 05:42:40
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:00
Coco薇(2017年8期)2017-08-03 15:23:38
中国知识产权(2017年2期)2017-03-13 19:24:40
Coco薇(2015年5期)2016-03-29 23:22:15
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:29