
非同轴两轮机器人的自平衡分析与控制策略
2018-03-23 06:32李亚锋王卫军侯至丞
自动化与仪表 2018年3期
李亚锋 ,王卫军 ,2,张 弓 ,侯至丞 ,杨 根
(1.广州中国科学院先进技术研究所,广州 511400;2.深圳中科德睿智能科技有限公司,深圳 518109)
两轮平衡机器人是载人移动机器人领域的研究热门之一,有同轴两轮(左右布置)和非同轴两轮(前后布置)两类。同轴两轮机器人采用被动平衡方式,即需要依靠前后运动来实现动态平衡(类似倒立摆系统),已取得很多研究成果和应用如大名鼎鼎的Segway[1]。非同轴两轮机器人是一个欠驱动、非线性、侧向不稳定系统,其动力学与控制研究极具挑战性,目前仍处在实验室研发阶段[2]。1998年俄罗斯莫斯科国立大学,利用陀螺效应产生的进动力矩实现侧平衡,设计了一款具有自平衡功能的自行车[3]。2005年日本村田公司推出了会骑自行车的“村田男孩”,依靠安装在其胸部的一个垂直惯性轮实现左右平衡[4]。2011年美国LIT汽车公司,申请了利用2个飞轮的陀螺效应来保持平衡的载人摩托车专利[5]。2014年美国俄亥俄州立大学以拉格朗日方程建立系统动力学方程,设计一阶滑模控制器并在自行车上开展试验,具有较好的鲁棒性[6]。
与同轴两轮机器人相比,非同轴两轮机器人具有动作灵活,良好的爬坡和越障能力,安全性好等优点,有望应用于载人交通工具、自主巡逻、侦查等领域。目前非同轴两轮机器人车仍面临一些技术问题:平衡鲁棒性欠佳;抗撞击能力弱;高速行驶、小半径转向、爬坡等运动的稳定性不高[7-8]。在此,介绍一种载人非同轴两轮自平衡机器人,依靠一对陀螺转子同步进动产生的陀螺力矩实现自平衡。
1 原理与结构
单个陀螺转子进动产生的陀螺力矩τ,如图1所示,满足的公式[9]为
式中:Jz为陀螺转子的转动惯量;ωz为陀螺转子自转角速度;ωy为陀螺转子进动角速度。陀螺力矩的方向符合右手定则(即图中x轴负方向),并随进动角的变化而变化。

图1 陀螺转子陀螺效应原理Fig.1 Gyroscopic effect principle of gyro rotor
由于进动角的存在,陀螺力矩可分解为翻滚力矩和航向力矩,前者是起平衡作用的有效力矩,后者则是影响平衡稳定的干扰力矩,因此单陀螺平衡的效果很差。文中所采用双陀螺平衡的结构如图2所示。为了使两陀螺转子的翻滚力矩作用叠加、航向力矩相互抵消,应保证两陀螺转子的自转方向和进动方向都相反。
由图可见,车身机体坐标系O1x1y1y1,陀螺转子坐标系O2x2y2z2和陀螺转子坐标系O3x3y3z3这3个坐标系处于同一平面内(即y1,y2,y3轴的方向相同,由纸面朝外),其中x1轴为车身前进方向。为便于分析,令2个陀螺的进动角速度大小相等、方向相反。假设某刻两陀螺的进动角为α,则双陀螺转子进动过程中在x1轴方向产生的翻滚力矩τro为
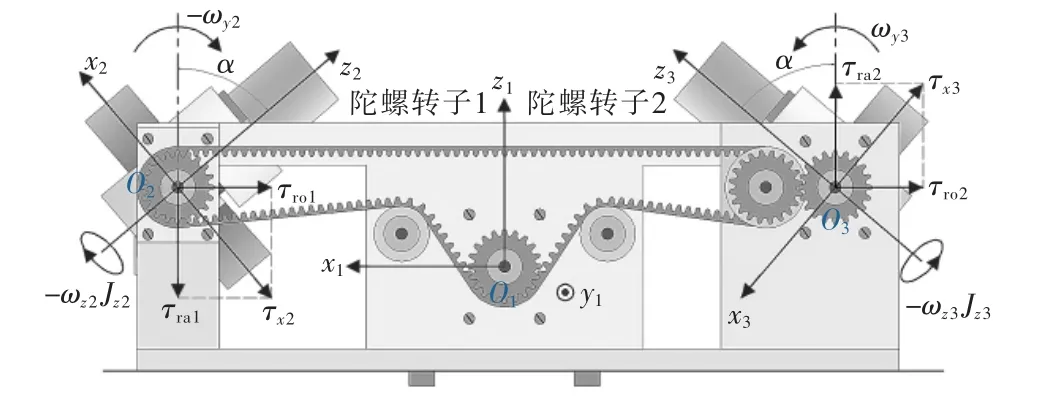
图2 陀螺装置平衡机理分析Fig.2 Analysis of balance mechanism of gyroscope

式中:Jz2,Jz3为陀螺转子的转动惯量;ωz2,ωz3为陀螺转子自转角速度;ωy1为陀螺转子进动角速度。翻滚力矩τro的方向为x1轴负方向。2个陀螺在z1轴方向产生的航向力矩τra为

由上式可知,当两陀螺结构参数一致且进动速度大小相同时,航向力矩为零,因此双陀螺装置的优势在于,可以抵消因单陀螺进动而产生的干扰力矩,实现系统的平衡稳定。为保证两陀螺转子进动过程的同步性,平衡装置采用了机械方式即同步带传动机构。由此可知进动角速度与进动角是控制系统平衡的关键因素。
为进一步简化分析过程,假设机器人的前、后轮与地面的接触点都落在地理坐标系xyz的x轴上,且机体坐标x1与地理坐标x轴平行,其动力学模型为如图3所示。在忽略空气阻力、轮胎与地面之间力矩的前提下,当车身相对于z轴的倾斜角为θ时,平衡车动力学方程为

式中:Jx为车身相对于x轴的转动惯量;θ¨为车身左右倾斜的角加速度 (即翻滚角加速度);G为机器人所受重力;h为重心与O点的距离。

图3 系统简化力学模型Fig.3 Simplified mechanical model of system
非同轴两轮自平衡机器人机械结构的实物如图4所示,其整体结构由车头、车尾、车身3部分组成。车头部分包括橡胶轮、舵机与前轮转向机构等;车尾部分主要轮毂电机、减震机构等;车身包括双陀螺平衡装置与电控系统。双陀螺平衡装置由前后陀螺转子、无刷电机、陀螺转子同步机构、陀螺进动电机等构成。电控系统由主控制板、电机驱动器及传感器、锂电池组等构成。

图4 非同轴两轮自平衡机器人Fig.4 Non coaxial two wheel self balancing robot
2 平衡控制方案
非同轴两轮自平衡机器人的控制系统硬件组成如图5所示。控制系统按功能分为5个单元,即上位机、主控单元、驱动器、传感器检测、电源管理。电机包括4种类型:陀螺自转电机、陀螺进动电机、前轮转向舵机、后轮前进驱动电机。
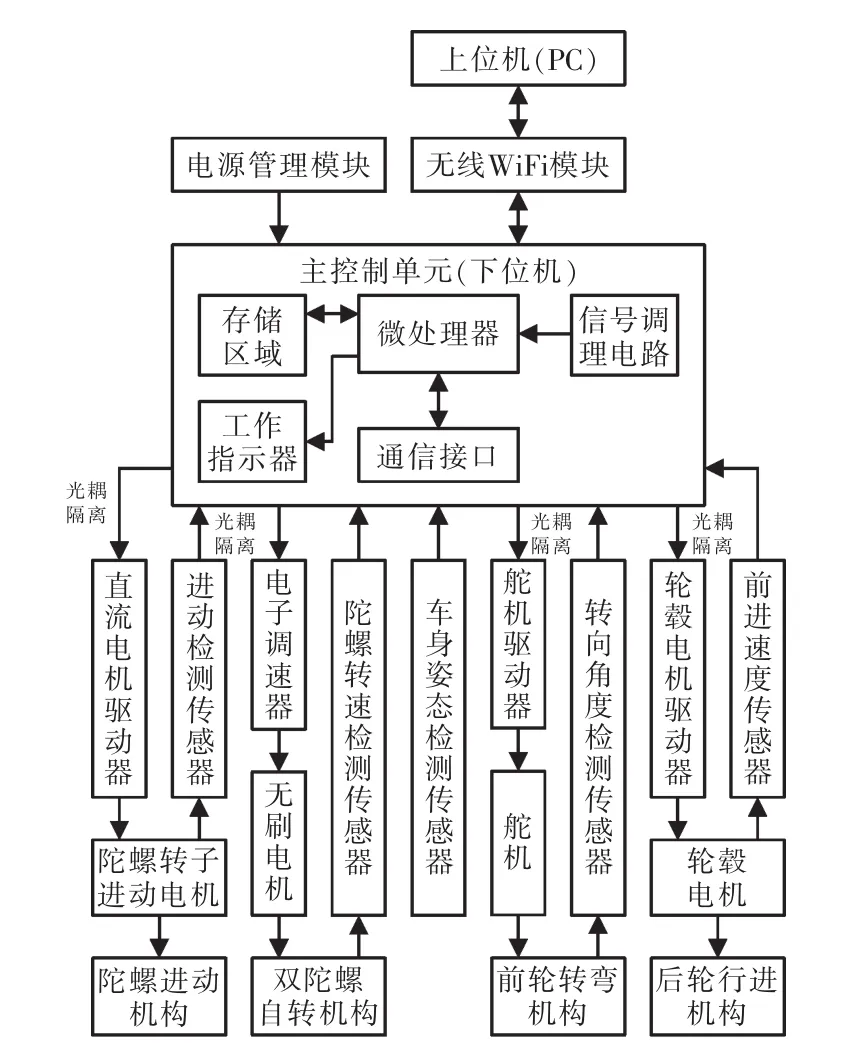
图5 控制系统硬件组成Fig.5 Hardware composition of control system
自平衡机器人系统最重要的参数是车身倾斜角θ。要实现平衡应使θ=0。单纯的PD控制可以使车身实现短暂的平衡,但无法持续稳定,系统容易震荡直至崩溃。究其原因,自平衡机器人是一个非线性、耦合的系统,而且为了抵抗车身外力矩(主要是重力矩)的存在,陀螺始终会朝一个方向进动,从而导致进动角过大,陀螺效应的平衡作用失效。
在平衡控制过程中,系统需要添加1个陀螺进动角归零补偿量θα,使陀螺进动角α趋向于零,否则车身会因陀螺效应失效而倾倒[10]。文中采用了模糊PD与增益调度来控制机器人的自平衡过程,如图6所示。平衡控制器通过增益调度来减小车身左右震荡,而这些参数值均由试验测试得到。

图6 非同轴两轮机器人的平衡控制Fig.6 Balance control for non coaxial two wheeled robot
由日常经验可知,以一定的速度驾驶自行车或摩托车转弯时,车身需要倾斜一定角度才能保证转弯不倒,这是因为转弯过程中需要车身提供一个向心力。考虑到该转弯因素,车身的左右动力学方程(4)变为

式中:Fc为车身转弯时产生的离心力。而转弯时,车身倾斜角θ与转弯角β之间的关系[11]为

式中:v为车身前进速度;d为前后轮胎着地点之间的距离;g为重力加速度;m为车身质量;M为总质量(加上负载);L为车身重心高度。
为解决转弯时的平衡问题,PD控制中需要再加入1个基于转弯离心力的倾角补偿量θβ(其大小与前轮转弯角和后轮转速相关)。
车身倾斜角的总补偿量为θα+θβ,由此得到车身倾斜角的偏差为

式中:θd为期望的倾斜角;θe为倾斜角总补偿量。
那么,通过模糊PD控制器来控制前后2个陀螺产生的翻滚力矩为

式中:τro为前、后陀螺转子产生的总翻滚力矩;kP和kD为模糊PD控制器输出控制增益。
根据模糊理论,取倾斜角θ和倾斜角速度θ˙的模糊子集为{NB,NM,NS,Z,PS,PM,PB}。 根据模糊子集和自平衡机器人系统的动力学简化模型,模糊输入参数倾斜角误差eθ与角速度误差e˙θ的模糊论域为[-1,1],量化等级为{-1,0.5,-0.25,0,0.25,0.5,1},量化因子分别为0.3 rad和1 rad/s。模糊输出控制量的论域[-1,1],量化等级为{-1,0.5,-0.25,0,0.25,0.5,1},比例因子为10 rad/s。输入与输出隶属的函数如图7所示[12-13]。而模糊控制规则见表1。
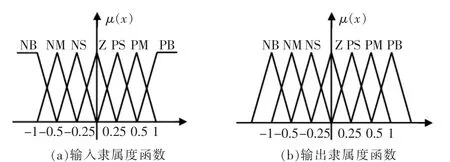
图7 输入输出隶属度函数Fig.7 Input-output membership function
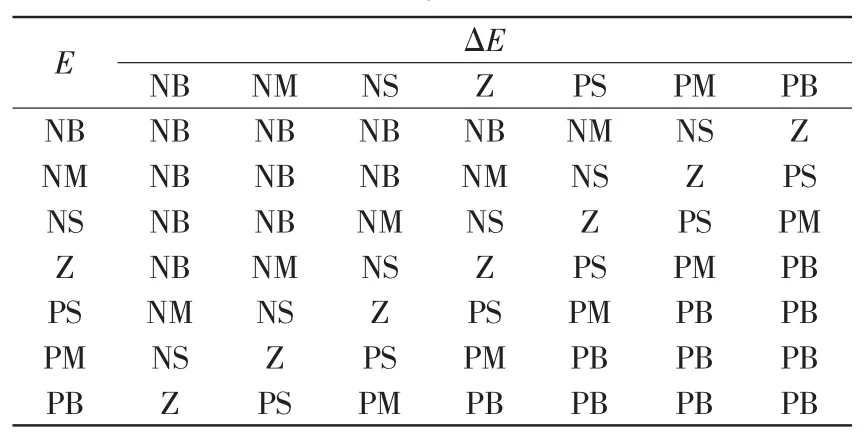
表1 模糊控制规则Tab.1 Fuzzy control rule
通过Matlab仿真,得到平衡机器人的动态数据时间响应曲线如图8所示,由仿真结果可以看出系统能够快速进入平衡稳定状态。

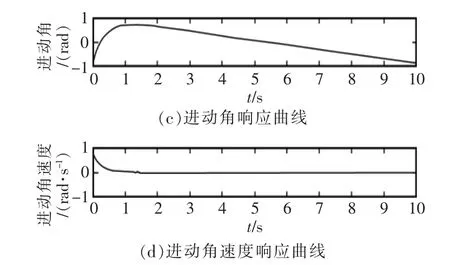
图8 车身自平衡过程中姿态参数响应曲线Fig.8 Response curve of attitude parameter in auto body self balancing process
3 试验与结果分析
文中针对非同轴两轮机器人的平衡性能开展了一些试验验证,分别采用PD和模糊PD增益调度方式在样机上进行了对比测试。试验样机的具体规格参数见表2,主控单元芯片采用ARM,数据采样率为100 Hz。

表2 系统规格参数Tab.2 System specification parameters

图9 车身自平衡过程中倾斜角及其角速度Fig.9 Tilt angle and its angular velocity in auto body self balancing
从静止倾斜倒地至自动恢复平衡过程中,车身的倾斜角与角速度变化曲线如图9所示。由图可见,车身刚开始处于左侧倾倒状态,由倾倒状态变成平衡状态只需要1~2 s内就可以完成。单纯采用PD控制方式只能使车身在平衡状态附近维持十几秒,然后很快出现高频震荡,直至系统崩溃倾倒在右侧。而采用模糊PD增益调度控制方式,能始终维持车身在平衡状态,超调量小且稳定状态下车身倾斜角θ为-0.02~0.02 rad,即偏差小于±1.5°。
在车身自平衡过程中,陀螺的进动角与角速度的变化曲线如图10所示。同样可见,当采用纯PD控制方式时,陀螺转子进动角在30 s时刻开始高频震荡直至陀螺力矩失效状态。而采用模糊PD增益调度方式时,陀螺进动角终态偏差处于-0.2~-0.1 rad,由图可见,陀螺进动角终态的偏差中心并未处于0线上,这是由于制作的样机重心偏向右侧形成偏心力矩所致,陀螺需要不断地朝一个方向进动来产生抵抗力矩。

图10 车身自平衡过程中陀螺进动角及其角速度Fig.10 Gyro precession angle and its angular velocity in auto body self balancing
4 结语
非同轴两轮机器人采用了主动平衡方式,具有良好的平衡鲁棒性、抗冲击性以及调速性,可在静止或移动中实现平衡,故安全性更好。所开发的非同轴两轮的载人交通工具原理样机能够实现自动平衡。由试验结果可知,非同轴两轮自平衡机器人采用纯PD控制平衡的效果并不理想,而采用模糊PD增益调度方式的平衡性能则表现很好,车身倾斜角与陀螺进动角都处在比较稳定、合理的范围内。
参考文献:
[1]“Segway”[EB/OL].http://www.segway.com.
[2]朱磊磊,陈军.轮式移动机器人研究综述.机床与液压[J].2009,37(8):242-247.
[3]Beznos A V,Formal'sky A M,Gurfinkel E V,et al.Control of autonomous motion of two-wheel bicycle with gyroscopic stabilization[C]//IEEE International Conference on Robotics and Automation.IEEE,1998,3(3):2670-2675.
[4]村田制作所[EB/OL].http://murata.com.
[5]丹尼尔·基勇·金,凯文·布莱特尼,安德鲁·L·曾.陀螺稳定式车辆:中国,80024268.3[P].2013-07-03.
[6]Yetkin H,Kalouche S,Vernier M,et al.Gyroscopic stabilization of unmanned bicycle[C]//American Control Conference(ACC).IEEE,2014:4549-4554.
[7]Karnopp D.Tilt control for gyro-stabilized two-wheeled vehicles[J].Vehicle System Dynamics,2002,37(2):145-156.
[8]李勇,耿建平,林群煦,等.基于双飞轮陀螺效应的两轮自平衡机器人的研制[J].机电产品开发与创新,2015,28(6):14-16,28.
[9]周龙加.一种基于陀螺进动效应的稳定装置研制[J].现代制造,2016,21(24):100-101.
[10]于法传.基于陀螺进动效应的独立机器人的研制[D].哈尔滨:哈尔滨工业大学,2015.
[11]张婷玉,陈清梅,邢红军.自行车转弯问题的研究[J].首都师范大学学报:自然科学版,2015,36(4):30-32.
[12]杨正才,吕科.基于模糊PD控制方法的两轮直立自平衡电动车研究[J].控制工程,2016,23(3):366-370.
[13]胡敬敏,阮晓钢.一种基于模糊控制理论的独轮机器人控制算法[J].控制与决策,2010,25(6):862-866.
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
家庭影院技术(2021年3期)2021-05-21
河北理科教学研究(2020年2期)2020-09-11
家庭影院技术(2020年1期)2020-06-24
北京航空航天大学学报(2017年1期)2017-11-24
弹箭与制导学报(2017年3期)2017-11-01
雷达学报(2017年1期)2017-05-17
现代防御技术(2014年4期)2014-07-10
客车技术与研究(2014年1期)2014-03-20
现代防御技术(2014年6期)2014-02-28
