
GNSS接收机数据质量及常见问题分析
2018-03-19 08:34帅玮祎董绪荣李祯东
测绘工程 2018年4期
帅玮祎,董绪荣,王 军,李祯东
(1.装备学院,北京 101416;2.93787部队,北京 100076)
进入21世纪以来,卫星导航产业蓬勃发展,其应用领域涉及到国家发展、人民生活的方方面面。全球卫星导航系统(global navigation satellite system,GNSS)接收机作为接收GNSS卫星信号,实现定位、导航和授时功能的终端,是导航系统同用户的接口,联系的纽带[1-2]。GNSS接收机数据质量是接收机实现各项功能的基础,也是GNSS向用户提供各项服务的基础。根本上来说接收机数据质量直接反映了服务性能的优劣。通过数据分析也可以检测出导航系统、接收机及天线周围环境的各类问题,对系统建设和用户应用都具有实际意义[3-5]。
当前对GNSS数据质量的核验主要采用的是TEQC软件[6-8],方法和评价指标较为单一,并没有形成系统分析方法。因而本文给出了一种综合利用TEQC、GAMIT、RTKLIB三款软件进行GNSS数据质量核验的方法,给出了相应质量核验指标的定义;以北京市全球卫星定位系统网络内3个基准站上北斗三模接收机和GPS/GLONASS双模接收机数据为基础,利用本文提出的方法对数据进行了质量核验,并对各项指标结果进行了对比分析;最后结合分析结果和实地勘测结果,给出了个别基准站数据出现问题的原因,提出改善建议,并对改善后该站观测数据进行质量分析,验证建议的实用性。
1 GNSS数据质量分析指标基础理论
结合近年来国内外专家学者的研究工作,数据质量分析所采用的指标主要有数据利用率、多路径效应、周跳、信噪比等[9-10]。结合接收机数据的应用,本文采用5种参数作为评价接收机静态数据质量的指标。
1)数据利用率。数据利用率反映了数据的完好性和可用性[11],表征了卫星高度角大于或等于截止高度角上数据中码数据、载波相位数据的完整性。接收机故障或环境干扰可能导致数据利用率过低。
ratio=Obscomplete/Obspossible.
(1)
其中,Obscomplete为观测数据中的完整历元数,Obspossible为理论上可以观测到的历元数。
2)伪距测量噪声误差。伪距定义为信号接收时间tu(t)与信号发射时间t(s)(t-τ)之间的差异与光速c的乘积[12],考虑大气折射效应对光速的影响,伪距观测方程式为
ρ(t)=r(t-τ,t)+c(δtu(t)-δts(t-τ))+
cI(t)+cT(t)+Mρ+ερ(t).
(2)
其中,r为卫星和接收机之间的几何距离,τ为信号从卫星到接收机所需的实际传播时间,δtu为接收机时钟钟差,δts卫星时钟钟差,I为电离层延迟,T为对流层延迟,Mρ为多路径误差,ερ为伪距测量噪声量,代表了所有没有直接体现在式(2)中的各种误差总和。
3)载波相位测量值。接收机除了从卫星信号中获得伪距测量值以外,还有一个基本测量量为载波相位,其精度较高,在精密定位中起到了关键性作用[13]。其观测方程式为
φ=λ-1(r+δtu-δts-I+T)+N+mφ+εφ.
(3)
其中,φ为载波相位差,λ为载波波长,N为整周模糊度,mφ为多路径效应,εφ为载波相位测量噪声量。
4)多路径误差。多路径误差主要指的是卫星信号在传播过程中,受到环境地物的反射,使得信号经过多次反射才能到达接收机,因此产生的信号强度、延时或是相位状态的变化而引起的接收机测量值误差(Mρ和mφ)。多径效应会给伪距测量值和载波相位测量值同时引入不同程度的误差,考虑到实际测量中,载波相位测量值中的多径误差要远远小于伪距的多径误差。
5)周跳比。周跳是指载波相位测量中,由于卫星信号的失锁而导致的整周计数的跳变或中断。这种现象可能是由天线的遮挡或是接收机质量问题产生的,通常采用理论上历元数与周跳的比值来作为周跳的统计值。
o/slip=Obspossile/slip.
(4)
2 主要软件介绍
本文采用TEQC软件为主,结合GAMIT/GLOBK、RTKLAB来进行质量检查。
TEQC(Translation、Editing、and Quality Checking)是功能强大且简单易用的GPS/GLONASS 数据预处理软件,最新的2016版本提供了BDS接收机数据接口。主要功能有格式转换、编辑和质量检核。质量检查可以用于检查接收机动态和静态数据的质量,反映出数据的可用性、电离层延迟、多路径影响、接收机周跳、卫星信号信噪比等信息,并实现了可视化。
GAMIT/GLOBK软件最初是由美国麻省理工学院(MIT)研制的,后又与斯克里普斯(SCRIPPS)海洋研究所(SIO)共同开发改进的一套基于UNIX/LINUX操作系统下的用于高精度GPS数据处理分析软件。处理长基线和连续时段静态定位相对精度可达10e-8~10e-9数量级,处理短基线的精度可达1~3 mm。不仅精度高、功能强大,而且开放源代码,用户可以根据实际需要进行人工干预进行数据处理[14]。
RTKLAB是一个用于GNSS精确定位的开源程序包,包含一个便携式程序库和多个应用程序[15],具有强大的图形输出功能,可以对接收机观测数据进行卫星可见性、天空视图和高度角等参数进行可视化显示。
3 数据质量结果及相关问题分析
首先选取北京市全球卫星定位系统网络内石景山、牛口峪和平谷3个基准站于2016-10-03—2016-10-09的观测数据,每天观测时间为24 h,采样间隔为15 s。采用GPS/GLONASS双模接收机和北斗三模接收机两款接收机数据用作对比分析。本文为了保证对比结果的科学性,只采用北斗三模接收机中接收到的GPS和GLONASS星的数据进行对比。
3.1 数据各项质量指标分析
1)数据利用率。从图1中可以看出,两款接收机反映出三个基准站数据利用率高低情况是一致的:数据利用率从高到低分别为平谷、牛口峪、石景,石景山站数据利用率平均在85%以下;对比两款接收机,北斗接收机数据利用率要低于GPS/GLONASS接收机。

图1 BDS、GPS/GLONASS接收机数据利用率对比图
2)伪距测量噪声误差。采用GAMIT进行解算时,伪距噪声误差结果会记录在名为autcln.sum.post的文件中,如图2所示。
由于现在GAMIT软件还不能处理GLONASS双频数据,因此这里只采用两款接收机的GPS数据进行处理,并进行对比分析。处理一周数据得到的伪距噪声误差如图3所示。
两款接收机反映出三个基准站伪距噪声误差情况是一致的,整体上看,北斗三模接收机数据的伪距噪声误差要大于GPS/GLONASS双模接收机,石景山站的伪距噪声误差要远远高于其他两站。

图3 BDS、GPS/GLONASS接收机伪距噪声误差对比图
3)相位测量误差。autcln.sum.post中同时给出了在不同高度角下载波相位测量值的噪声误差。结果如图4所示。
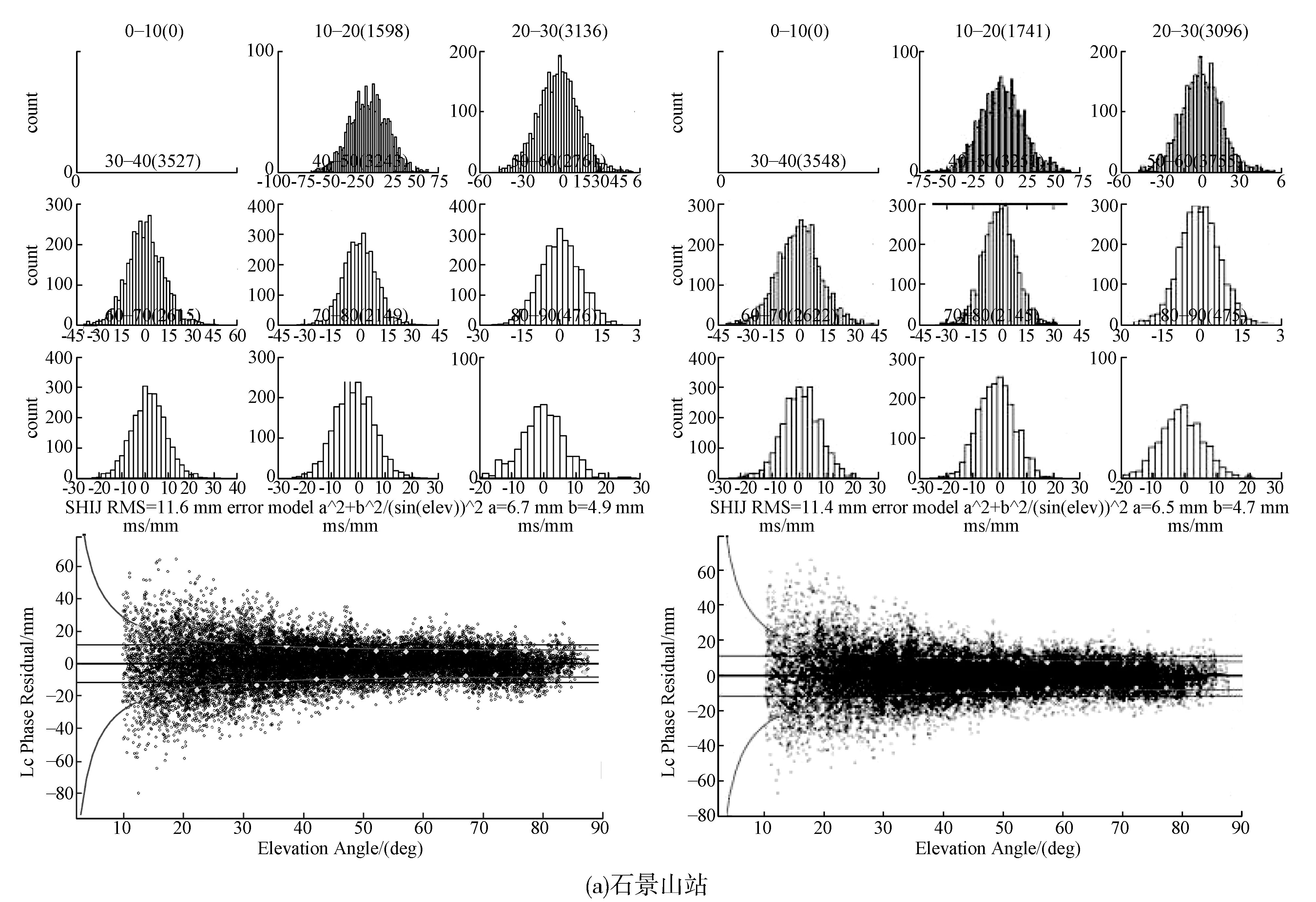
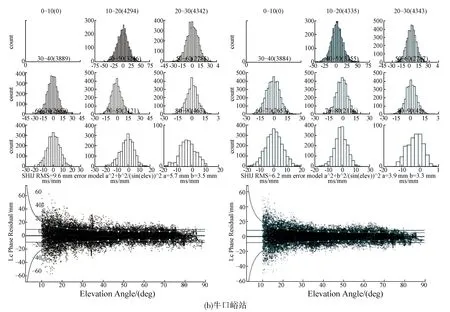

图4 BDS、GPS/GLONASS接收机相位噪声误差对比图(左侧为北斗接收机数据)

图5 BDS、GPS/GLONASS接收机数据mp1对比图
从图中可以看出,两款接收机反映出的3个站的相位噪声误差情况也是基本相同的,数据相位噪声误差随高度角变化的趋势大致相同,除了石景山站在高度角为10°~30°时分布较为散乱以外,误差大小及分布趋势3个站大致相同。从给出的不同高度角上的误差值对比可知,北斗三模接收机GPS数据的相位噪声误差要大于GPS/GLONASS双模接收机。
4)多路径误差。TEQC和RTKLAB软件都可以给出多路径误差结果,TEQC以数据文件格式给出,RTKLAB则直接给出可视化结果,为了便于数据对比分析,这里利用TEQC软件来计算多路径误差。2015年6月发布的TEQC版本已经可以处理北斗数据,因此这里采用两类接收机接收到的GPS和GLONASS数据进行对比。
根据国际公认的数据质量检测系统规定的惯用参考指标[16],本文采用mp1<0.5 m,mp2<0.75 m作为标准参考值,mp值越大,多路径效应越严重。结合图5、6中数据可以看出,石景山站mp1、mp2值89%以上天数均超标,多路径严重。牛口峪站上北斗接收机接收到的数据显示多路径严重,而GPS/GLONASS双模接收机数据正常。综合三个站mp1、mp2的值来看,采用北斗接收机数据计算出的多路径误差数值相对来说较大。

图6 BDS、GPS/GLONASS接收机数据mp2对比图
5)周跳比。采用的周跳比2 000,周跳比越小,表示周跳越严重。
由图7可知,3个站上北斗接收机数据显示的周跳比均在参考值之下,而平谷站GPS/GLONASS双模接收机数据中周跳比均远远高于正常水平,而石景山和牛口峪两个站点的周跳比则低于参考值。对比两类接收机结果,石景山、牛口峪两个站点数据周跳较为严重,而平谷站结果较差可能同北斗接收机自身硬件有关。
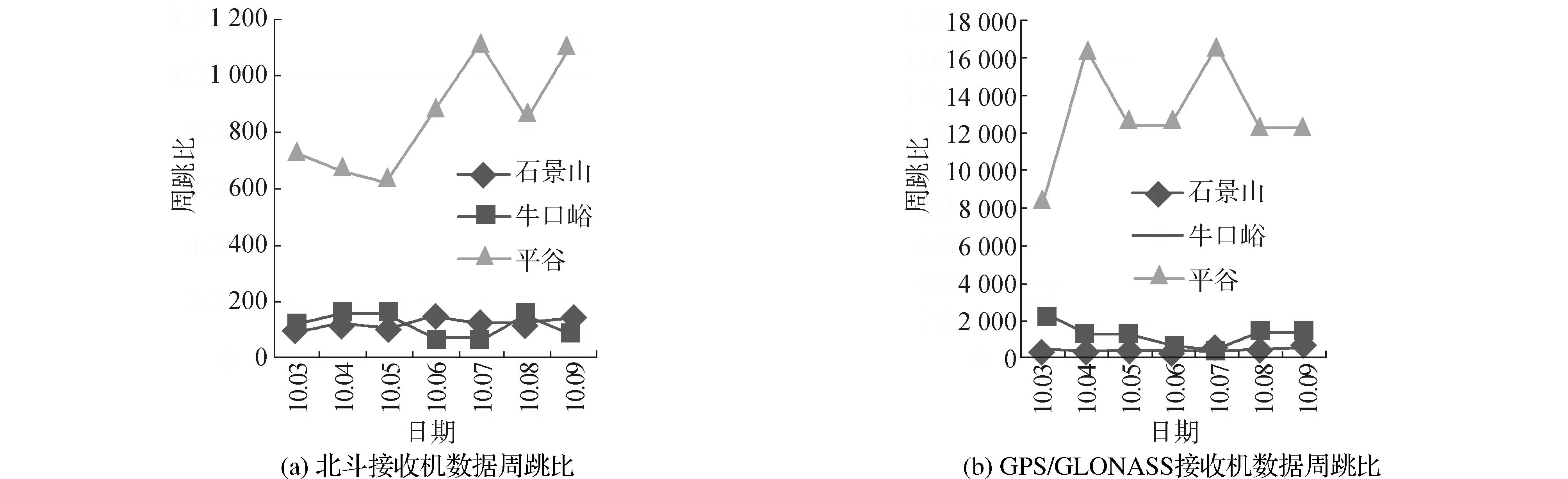
图7 BDS、GPS/GLONASS接收机数据周跳比对比图
3.2 质量结果分析
综合五项指标结果,分析得出以下结论:
1)石景山站两款接收机数据显示各项指标均较差,各类误差均较大,多路径和周跳现象尤为严重。综合各项指标,初步分析该站天线附近存在遮挡,且周围环境条件较差,同时可能存在电磁干扰等因素。
2)牛口峪站多路径和周跳现象较为严重,初步分析该站天线附近存在遮挡。
3)平谷站各项指标均在正常范围内,运行情况良好。
4)对比两款接收机结果可以看出,两款接收机反映出的数据问题情况基本一致,虽然在同一站点上北斗接收机接收到数据的各项指标都略差于GPS/GLONASS双模接收机,但这是接收机自身性能造成的,并不是该站点观测数据的问题。
为进一步确认石景山和牛口峪站天线附近是否存在遮挡,利用RTKLIB软件对两个基准站进行可见卫星数进行观测。图8为10月9日两个站点上空卫星分布图。
从图中可以直观看出,两个站点在东西方向都有部分区域接收卫星质量较差,出现失锁现象或中断,可以初步确定为天线存在遮挡。
4 实地勘测结果分析
对石景山和牛口峪两个站点进行了实地考察,现场实际情况如图9所示。
石景山站西侧有高层建筑正在施工,西、北两侧均有较高树木,牛口峪站周围也同样存在树木,因此对天线造成了干扰和遮挡,导致接收数据质量较差。对牛口峪站天线附近树木进行了砍伐,由于石景山站遮挡物无法进行移除,正在考虑更换站址。
为了验证牛口峪站观测数据是否恢复正常,下面给出砍伐树木后11月20日~11月26日一周数据的质量分析,前面的分析中已经排除了接收机硬件问题,仅分析GPS/GLONASS双模接收机数据质量,质量分析结果如表1所示。

图8 石景山、牛口峪站卫星分布图
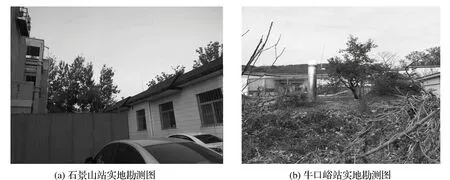
图9 石景山、牛口峪站实地勘测图

质量分析指标数据利用率/%伪距噪声残差/mm相位测量误差/mm多路径mp1/m多路径mp2/m周跳比11.2096858.5110.420.61206811.2198855.211.40.380.491206511.2298842.410.40.360.51207211.2396840.410.30.450.571205811.2498842.78.60.430.52965111.2599844.4100.390.514823211.2699837.78.50.340.4312059平均值97.7845.910.030.390.529238
将表中各项指标同前期平谷站(运行良好)各项指标参数值以及规定的标准值对比可以看出,牛口峪站观测数据各项指标均在正常范围内,该站运行恢复正常。
5 结 论
本文首先利用TEQC、GAMIT计算给出的五项质量分析指标,对数据质量进行分析,并分析超出正常范围的指标原因,同时结合RTKLIB给出的可视化结果对影响数据质量的因素进一步确认,通过实地勘测验证了分析结果及原因判断的准确性,进而验证了方法的实用性。
软件分析可以通过对基准站观测数据质量的分析来进行基准站常见问题的及时确认和排查,成本低、效率高,避免了不必要的人力物力浪费。此外本文给出的方法同时也可以用于GPS、GLONASS、BDS等单一卫星系统数据处理,实用性较强,对工程建设和实际操作应用都有一定的借鉴意义。
[1] 冯晓超,程晓滨,高帅,等.GNSS接收机观测数据多路径效应分析方法研究[J].全球定位系统,2010(1):11-15.
[2] 唐斌,刘富,张益青.GNSS接收机发展趋势与研究思路分析[J].导航天地,2011(1):82-84.
[3] 白锋.徕卡GNSSQC用于GNSS数据质量分析的研究[J].测绘通报,2010(6):72-73.
[4] 蔡华,赵齐乐,孙汉荣,等.GNSS实时数据质量控制[J].武汉大学学报(信息科学版),2011,36(7):821-824.
[5] 梁洪宝,顾焕杰,王友,等.GNSS观测数据质量对坐标解算精度的影响分析[J].测绘科学, 2016,41(5):5-9.
[6] 张涛,高玉平,张鹏飞,等.GNSS观测数据质量核验[J].时间频率学报,2016,39(1):1-7.
[7] 余文坤,戴吾蛟,杨哲.基于TEQC的GNSS数据质量分析及与处理软件的设计与实现[J].大地测量与地球动力学, 2010,30(5):81-85.
[8] 张显云,姚黔贵,张鹏飞,等.基于TEQC的GNSS数据质量可视化表达与分析[J].测绘通报, 2014,4:26-29.
[9] CHEN Liang,GENG Changjiang,ZHOU Quan.iGMAS GNSS data acquisition equipment quality compare and analysis[C]. China Satellite Navigation Conference 2012 Proceedings. 2012.05.
[10] TAN Yuan,YUAN Benyin,BAO Zhixiong.Research and implementation of the quality check of the GPS/BD/GLONASS Multi-constellation[C]. China Satellite Navigation Conference 2013 Proceedings,2013.
[11] 吴丹.GNSS观测数据预处理及质量控制[D].西安:长安大学,2015:9-13.
[12] MILLKIKEN R,ZOLLER C.Principle of Operation of NAVSTAR and System Characteristics[J].Navigation:Journal of the Institute of Navigation,1978,25(2).
[13] 谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2012:69-74.
[14] HERRING T A,KING R W,FLOYD M A,et al.GAMIT Reference Manual Release 10.6[M]. Department of Earth, Atmospheric, and Planetary Sciences Massachusetts Institute of Technology,2015.
[15] GITHUB.RTKLAB:an open source program package for GNSS positioning[EB/OL].(2014-12-05)[2015-03-28].http://www.rtklib.com/rtklib.htm.
[16] 邓清军.高精度GPS变形监测数据处理与分析方法研究[D].沈阳:东北大学,2008:20-25.
猜你喜欢
地理空间信息(2022年10期)2022-10-31
北京航空航天大学学报(2021年9期)2021-11-02
今日农业(2021年15期)2021-10-14
文萃报·周五版(2021年29期)2021-08-26
矿山测量(2020年6期)2021-01-07
中国交通信息化(2019年2期)2019-03-25
科学与财富(2018年27期)2018-10-19
测绘通报(2016年12期)2017-01-06
西安建筑科技大学学报(自然科学版)(2016年5期)2016-11-10
中国交通信息化(2015年10期)2015-06-06
