
基于高速列车转向架系统的数值模型修正
2018-03-19 09:48杨丹丹郭勤涛张令弥李海涛陶言和
机械制造与自动化 2018年1期
杨丹丹,郭勤涛,,张令弥,李海涛,陶言和
(1. 南京航空航天大学 机电学院,江苏 南京 210016; 2. 中车青岛四方机车车辆股份有限公司,山东 青岛 266111;3. 南京杰弗科机械技术有限公司,江苏 南京 210007)
0 引言
在机车的结构动力学设计中,转向架等复杂机械结构的动力学特性对车体、悬架以及整车的动力学特性具有重要的影响。有限元模型修正技术[1-2]基于试验结果对有限元仿真模型进行调整,缩小仿真和试验对应响应之间的误差,已达到提高有限元仿真模型的可行度的目的,现已在机械、土木及航空航天等领域得到广泛应用。模态试验[3]和修正方法[4-5]是有限元模型修正的两个主要方面。基于锤击法的试验模态分析是最为常用的方法,通过如频响函数交叉检验、频响曲线拟合等可以准确辨识出结构的模态频率、频响函数等重要的结构特性。大量的学者也对修正方法做了研究,主要包括基于灵敏度分析的方法、传统优化算法以及智能优化算法。本文建立了转向架的预修正模型,在锤击法模态试验的基础上,采用灵敏度分析方法对机车转向架模型中的参数进行了修正。
1 有限元模型修正技术的基本理论
基于模态特征值或模态特征向量的灵敏度分析[6]是解决大自由度结构动力学模型修正的主要方法。该方法的基本理论发展成熟,主要的步骤和公式如下。
已知结构的有限元模型共有n个设计参数,其中前m个为待修正的参数,则设计参数可以表示为:

(1)
则结构的总体刚度阵和质量阵可以用设计参数P的函数表达:
K=fK(p),M=fM(p)
(2)
则对应的特征量可以表示为设计参数的函数:
f=F(K,M)=F(fK(p),fM(p))=fp(p)
(3)
其中:f可以是任意的特征量,如模态频率、模态振型等,或者它们之间的组合。模型修正问题转化为如下的优化问题:
(4)
其中fe和fp(p)分别代表结构动态特性的实验值与分析值;R(p)称之为误差项;VLB、VUB分布代表结构设计参数变化的上下限;Wf代表结构各个特征量之间的加权矩阵。
通常情况下,fp(p)为制定设计参数的非线性函数。为将非线性问题转化为线性问题,在初始设计点将fp(p)展开成待修正参数的一阶泰勒表达式:
fp(p)=fp(p0)+SΔp
(5)
其中:p0是设计参数初始时的值。
(6)
式中的S代表特征量对设计参数的灵敏度矩阵,Δp=p-p0代表设计参数的误差。
特征值对参数的灵敏度如式(7)所示:
(7)

(8)

使用拉格朗日乘数法将极值问题转化为一个线性问题,如式(9)所示:
WfSΔp=Wf(fe-fp(p0))
(9)
式(9)是一种常见的模型修正方程,且是一个迭代优化的过程,一般情况下可以得到合适的结果。当加权矩阵和灵敏度矩阵的条件数较少时,需要对式(9)进行正则化。当参数的数目较大时,需要使用优化的搜索方法。本文采用SQP(sequential quadratic programming)的方法搜索置信区间。
2 组件及半转向架系统的修正
转向架结构系统是高速列车系统动力学的关键。转向架结构的精确建模在其振动响应加速度分析、结构强度改善等方面至关重要。根据高速列车转向架结构系统的特点,可以将整个系统分为3个部分,其中包括轮对子结构(下部支撑)、构架子结构以及由刚性质量块模拟的车体。为了获得高精度的模型,需要依次对构架、轮对的子结构模型进行修正,然后对整备状态下的转向架系统(含模拟的车体)进行修正。
2.1 构架子结构的有限元模型修正
图1为构架[8]总体的有限元模型图。其中空气弹簧支撑梁、侧梁、横梁、齿轮箱吊座、制动盘吊座、横梁连接梁采用板单元建模,电机、电机吊座采用四面体单元建模,构架上导管、电机与电机吊座之间的螺栓连接采用梁单元建模。
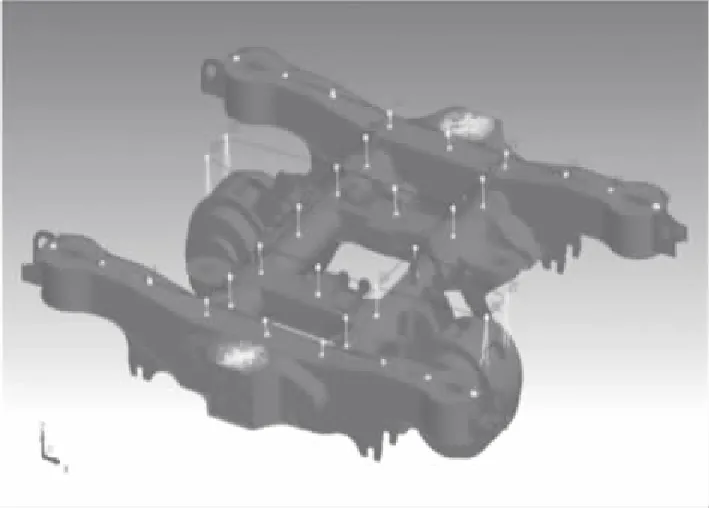
图1 构架总体有限元模型图
电机下端与电机吊座之间螺栓连接的局部放大图如图2所示。
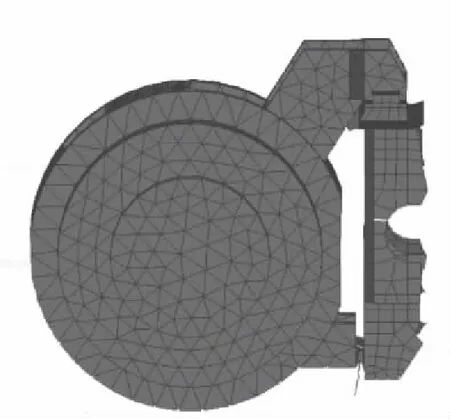
图2 电机下端与电机吊座之间螺栓连接局部放大图
对上述有限元模型采用模态分析模块的Lanczos方法提取特征值和特征向量。通过试验获取构架的模态,以试验测试的1~12阶结构模态为基准,选择有限元模型中的1~20阶结构模态与其匹配。在匹配过程中,取x,y,z3个方向的平动自由度,选取了34个节点进行MAC计算,其中x向为车长方向,y向为车宽方向,z向为车体竖直方向,下文中提到的方向与此处一致。初始的MAC匹配结果如图3所示。

图3 构架MAC匹配三维柱状图(修正前)
前3阶主要模态振型图如图4-图6所示,其中内部红色线条为试验模型,蓝色框架为有限元模型(因本刊为黑白印刷,插图中有色部分,可咨询作者,下同)。
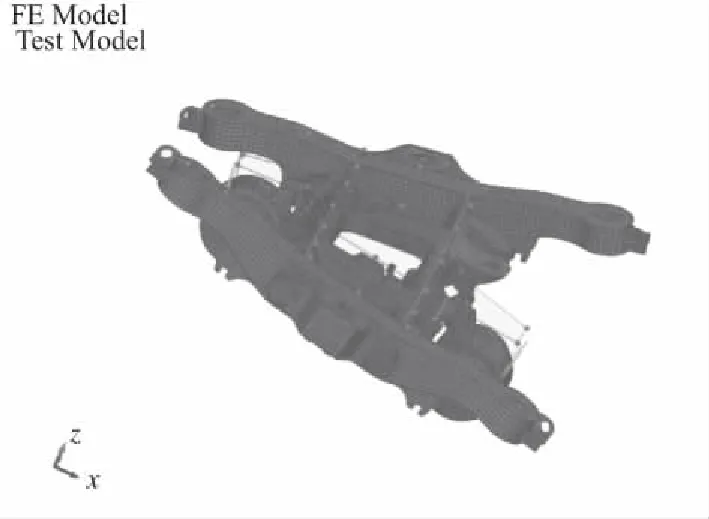
图4 计算与试验振型匹配图1
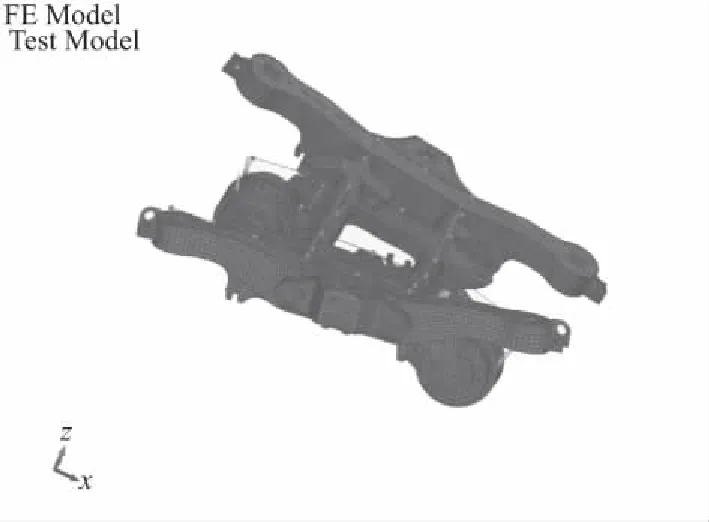
图5 计算与试验振型匹配图2
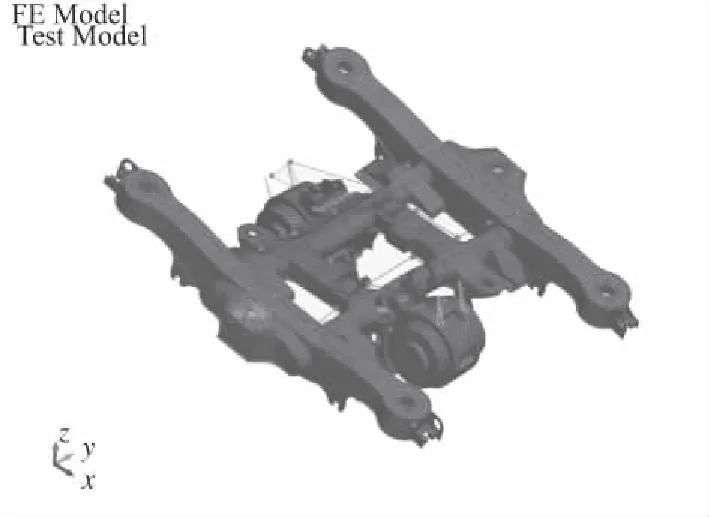
图6 计算与试验振型匹配图3
从图4-图6中可以看出,计算仿真与试验的振型变化一致。
根据MAC匹配顺序,选择试验的9阶模态频率作为修正目标。通过工程经验及尝试选取了9个参数,采用QP优化方法进行迭代,迭代步长为0.02,迭代18步。各阶频率对9个参数的灵敏度柱状图如图7所示。
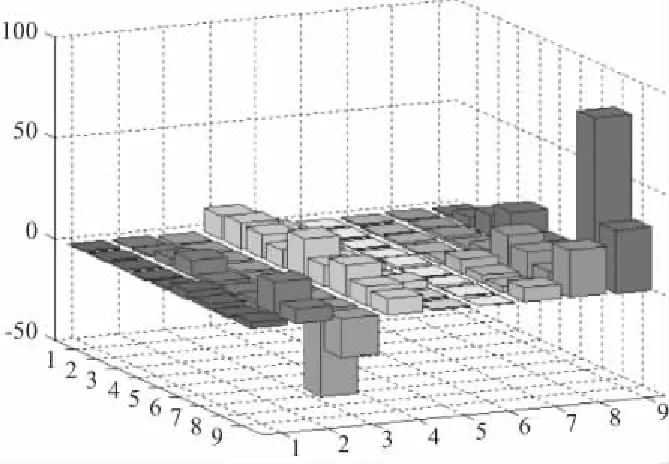
图7 9阶模态频率对9个修正参数的灵敏度柱状图
表1列出了构架模型修正参数的名称及修正前后参数的变化,参数的修正范围由工程经验及材料的属性联合确定。
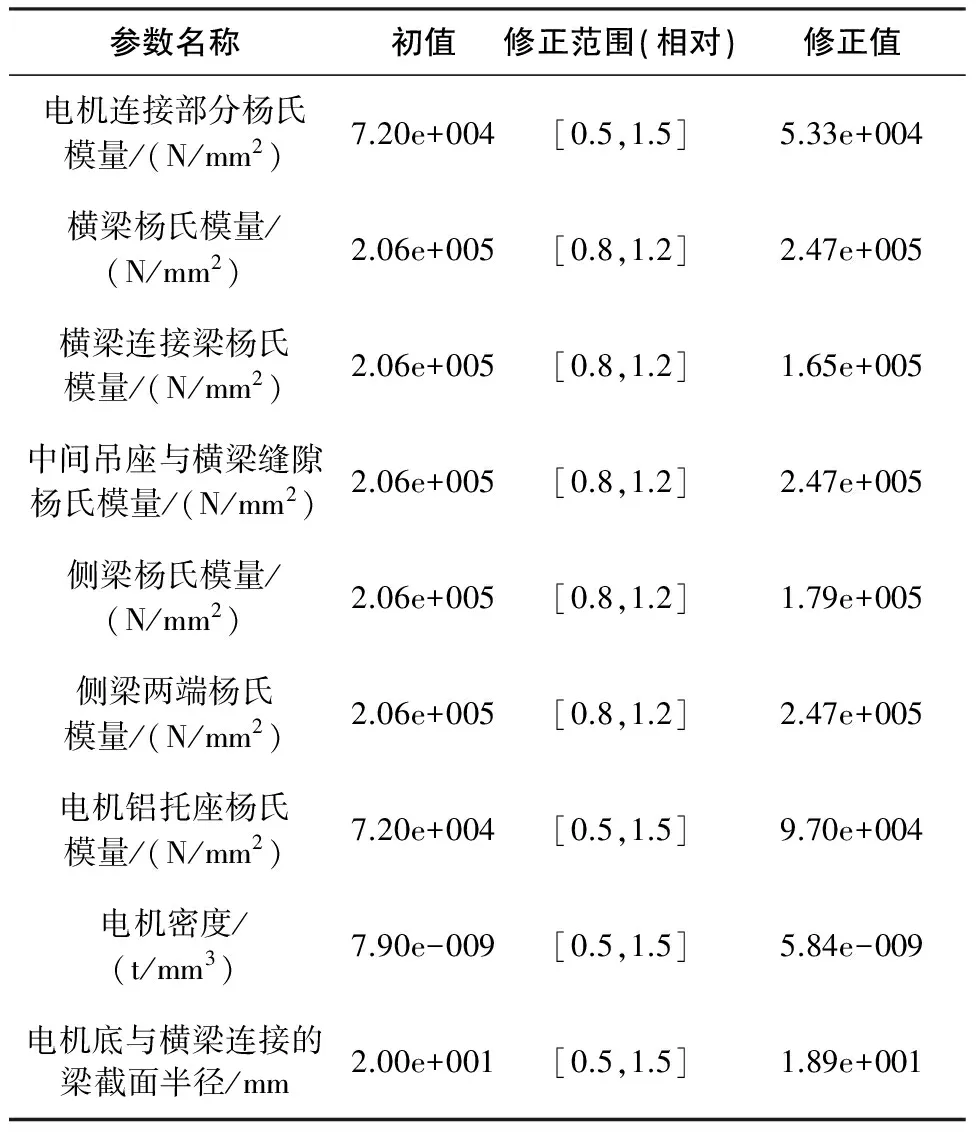
表1 构架修正参数的选择及修正前后参数值的变化
将修正后的模态结果与试验结果进行对比,发现修正降低了仿真计算与试验结果之间的误差,修正效果较好。修正过程中的频率误差变化曲线如图8所示,MAC值变化曲线如图9所示,修正前后3阶主要模态的频率误差和MAC值如表2所示。
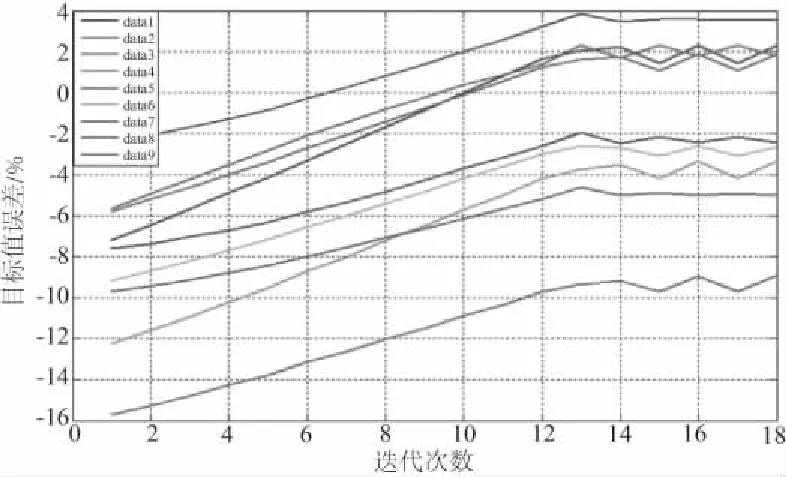
图8 修正过程中的频率误差变化曲线图
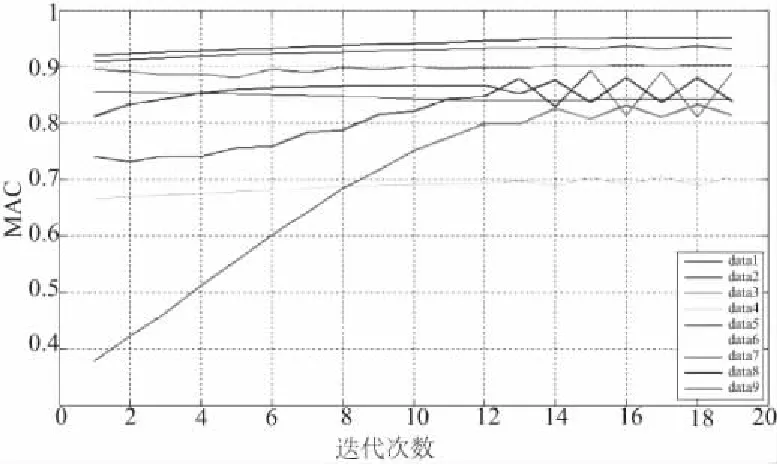
图9 修正过程中的MAC值变化曲线图

表2 构架模型修正前后3阶主要模态频率误差和MAC值
从表2中可以看出,构架模型修正后的频率误差由9.57%降至3.90%,修正效果较好,且修正后的MAC均值为0.91,比修正前的MAC略有提高,修正降低了仿真与试验之间的误差。
2.2 轮对子结构的有限元模型修正
采用商用有限元软件对轮对几何模型进行网格划分,得到的轮对有限元模型包含34 819个节点和22 948个单元,多数是六面体单元,计算精度较高,轮对有限元模型示意图如图10所示。为了获得与试验结果相一致的模型,轴承、齿轮轴和轴箱的参振质量以集中质量的形式添加,如图11所示。采用BUSH单元描述车轮和制动盘之间的螺栓连接,同时将BUSH单元的刚度作为待修正参数。考虑到轮盘外轮、轮毂内部和弹性轴等所采用的材料的差异以及模型简化造成的误差,将这3部分的材料属性定义为3种不同的材料参数。
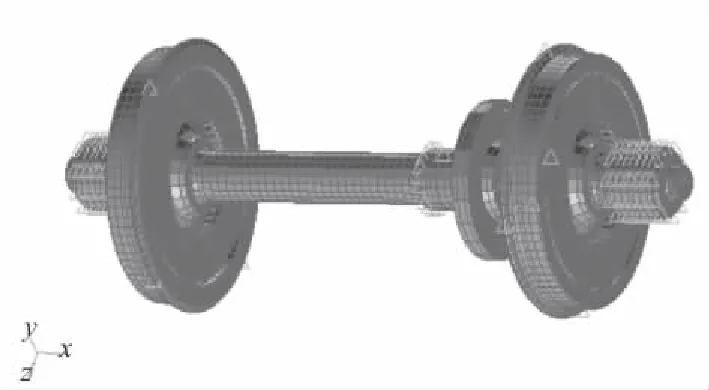
图10 轮对有限元模型示意图
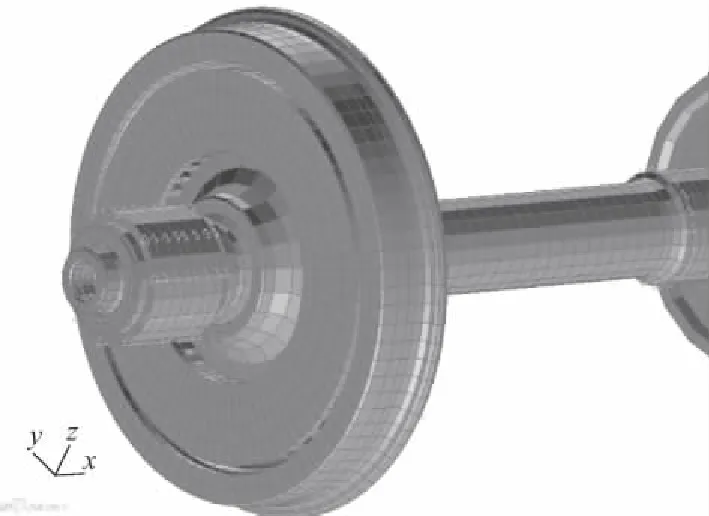
图11 集中质量的局部放大图
对轮对有限元模型进行模态计算,同样与试验测试结果进行振型相关分析。以试验测试的1~8阶结构模态为基准,选择有限元模型的1~20阶结构模态与其匹配。在匹配过程中,取x,y,z3个方向的平动自由度,选取了34个节点进行MAC计算,初始的MAC匹配结果如图12所示。
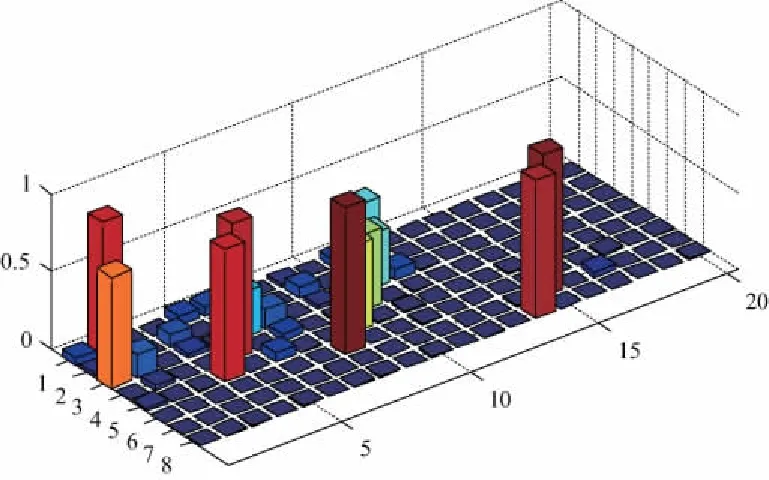
图12 轮对MAC匹配三维柱状图(修正前)
轮对前3阶主要模态振型图如图13-图15所示,其中内部红色线条为试验模型,蓝色框架为有限元模型。
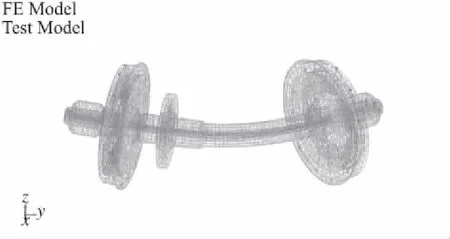
图13 计算与试验振型匹配图1
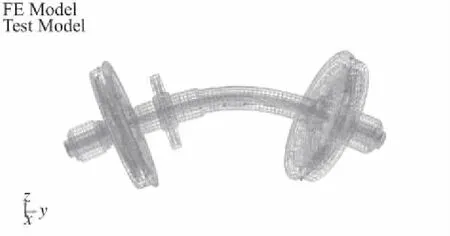
图14 计算与试验振型匹配图2
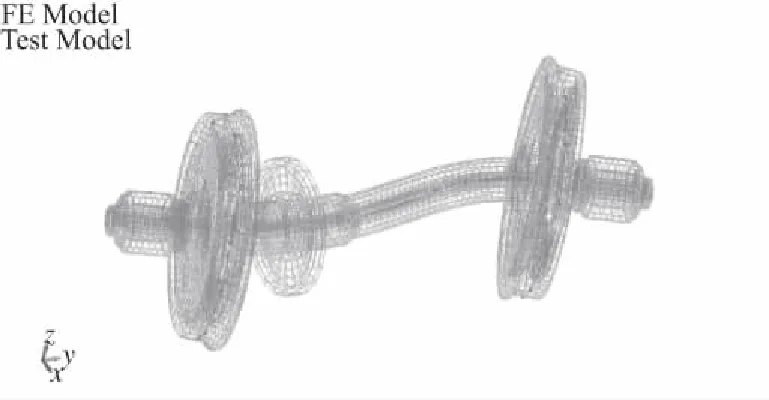
图15 计算与试验振型匹配图2
轮对有限元模型的修正思路与构架一致,以试验的7阶模态频率作为修正目标,通过工程经验及灵敏度分析计算选取了6组待修正参数,采用QP优化方法进行迭代。
迭代结束后各阶频率误差及MAC值均取得了较好的结果,迭代过程此处不再一一赘述。取模型修正前后3阶主要模态的频率误差和MAC值列入表3中。

表3 轮对模型修正前后3阶主要模态频率误差及MAC值
从表3中可以看出轮对结构的初始有限元模型有着较高的精度,频率误差的绝对值均值为10.17%,MAC均值为0.86。修正后的轮对有限元模型中,频率误差的绝对值均值降到3.87%,MAC数值有所提高。
3 模拟整备转向架有限元模型修正
基于修正后的构架与轮对模型,及连接组件的刚度参数初值,建立转向架有限元模型,如图16所示。在此前提下模拟车体质量,建立的模拟整备转向架有限元模型如图17所示,该模型共119 994个节点,116 262个单元。模拟车体质量32t,转向架质量7t。其中轴箱垂向减震器、轴箱定位节点、空气弹簧等都采用BUSH单元进行模拟[9]。
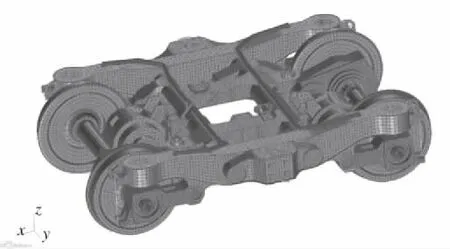
图16 转向架有限元模型图
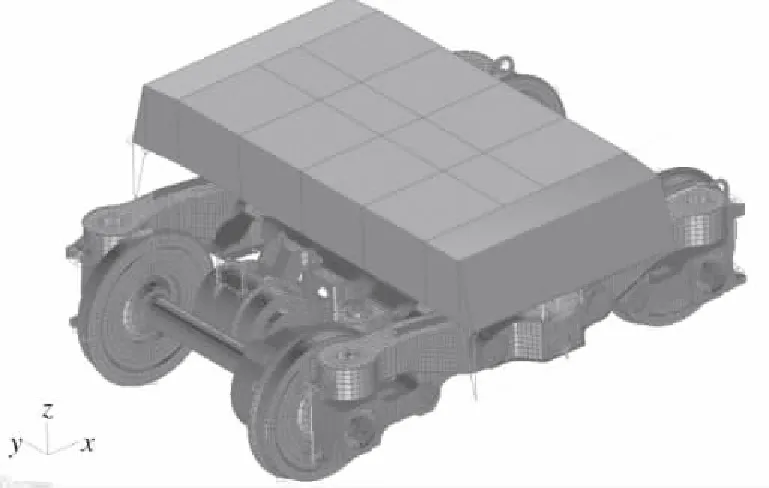
图17 模拟整备转向架有限元模型图
基于商用有限元软件,将轮对固定后的模拟整备转向架有限元模型进行模态分析,提取特征值,初始有限元模型计算的前3阶模态结果如图18-图20所示。
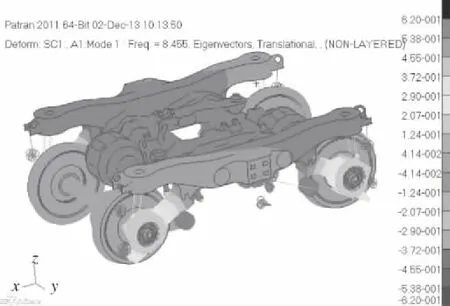
图18 构架浮沉(刚体模态)
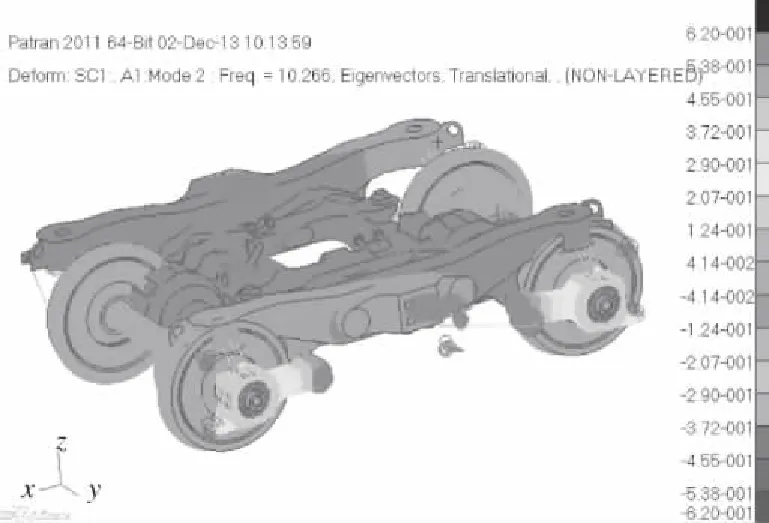
图19 构架侧移(刚体模态)
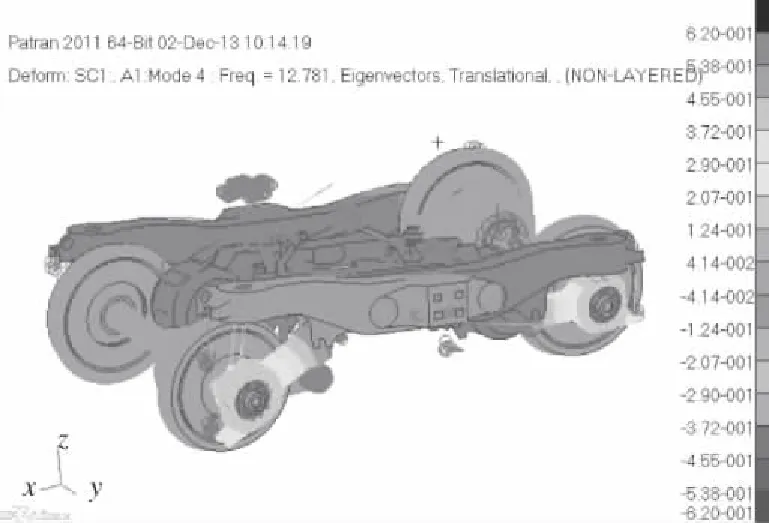
图20 构架点头(刚体模态)
以试验测试的1~6阶模态为基准(包含3阶刚体模态及3阶结构模态),选择有限元模型中的1~10阶模态与其进行MAC匹配。在匹配过程中,取x,y,z3个方向的平动自由度,选取了16个节点进行MAC计算,初始的MAC匹配结果如图21所示。
选择试验的6阶模态频率作为修正目标,通过工程经验及尝试先选取了12个参数,此时一般选为连接参数[10],各阶频率对12个参数的灵敏度柱状图如图22所示。
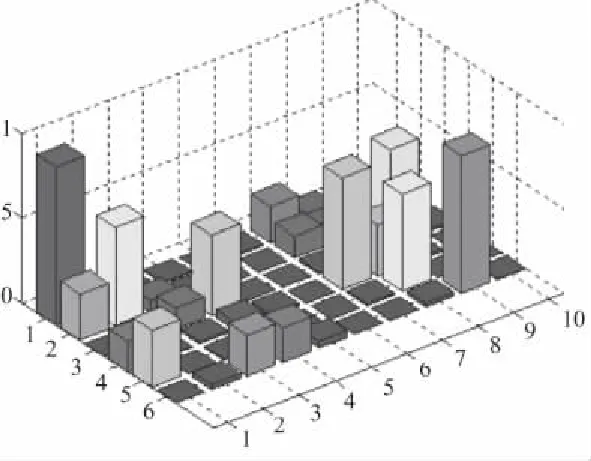
图21 转向架MAC匹配三维柱状图(修正前)

图22 各阶频率对12个参数的灵敏度柱状图
考虑到修正参数的实际物理意义,最终将参数筛选合并后分为6组,采用QP优化方法进行迭代,迭代步长为0.02,迭代50步。修正参数的名称及修正前后参数的变化如表4所示。。
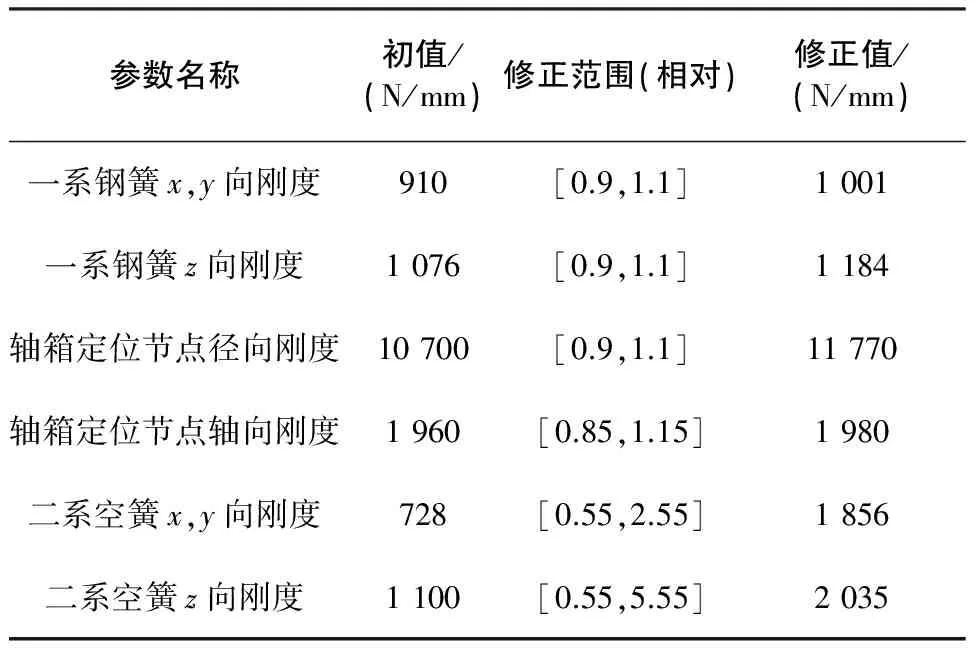
表4 修正参数的选择及修正前后参数值的变化
将修正后的模态结果与试验结果进行对比发现修正降低了仿真计算与试验结果之间的误差,修正效果较好。将主要关注的3阶刚体模态修正前后的模态频率误差及MAC值汇入表5中。

表5 转向架模型修正前后3阶刚体模态频率误差及MAC值
从表5中可以看出前3阶刚性模态频率误差修正后显著降低,修正后最大的频率误差绝对值由10.88%降至4.48%,频率绝对值均值也由5.98%降至1.63%,MAC数值变化不大,但MAC均值偏低。总体结果满足模型修正的目的。
4 结语
本文利用模型修正的方法,对构架、轮对、连接部件的刚度参数等子结构部件进行修正,将修正后的子结构模型组合最终得到了与实际物理模型相似度较高的模拟整备转向架有限元模型,在此研究基础上可以进一步展开轨道车辆整车动力学模型的修正与确认工作,进而进行整车动力学特性的分析计算。
[1] Mottershead J E, Friswell M. I. Model Updating in Structural Dynamics: A Survey Journal of Sound and Vibration[J]. Mechamical and Signal Processing, 1993, 167(2): 347-375.
[2] R. Kenigbuch and Y. Halevi. Model Updating in Structural Dynamics: A Generalized Reference Basis Approach[J]. Mechanical Systems and Signal Processing, 1998,12(1):75-90.
[3] M Link, MI Friswell. Generation of Validated Structural Dynamic Models - Results of a Benchmark Study Utilising the GARTEUR SM-AG19 Testbed[J]. Mechanical Systems and Signal Processing, 2003,17(1), 9-20.
[4] W. L. Oberkampf, C.J. Roy: Verification and Validation in Scientific Computing[D]. Cambridge University Press:2010: 559-625.
[5] Friswell M I , Mottershead J. E., Model updating using robust estimation[J]. Mechanical Systems and Signal Processing, 2002, 16(1): 169-183.
[6] 李效法. 基于灵敏度分析的模型修正研究及其实现[D]. 南京:南京航空航天大学,2007.
[7] 郭勤涛, 张令弥, 费庆国. 结构动力学有限元模型修正的发展-模型确认[J]. 力学进展, 2006(1):36-42.
[8] 徐慕达. 机车转向架相似结构的模型修正及参数不确定性分析[D]. 南京: 南京航空航天大学, 2014.
[9] 陶言和. 整备状态动车相似结构的连接参数有限元模型修正[D]. 南京:南京航空航天大学,2015.
[10] 费庆国, 张令弥, 李爱群,等. 基于不同误差的动态有限元模型修正的比较研究[J]. 振动与冲击, 2005(4):24-26.
猜你喜欢
Journal of Palaeogeography(2022年1期)2022-03-25
快乐语文(2021年35期)2022-01-18
建材发展导向(2021年7期)2021-07-16
中华养生保健(2020年3期)2020-11-16
哈尔滨铁道科技(2020年4期)2020-07-22
制造技术与机床(2019年12期)2020-01-06
西南交通大学学报(2018年5期)2018-11-08
电子制作(2018年17期)2018-09-28
中华诗词(2018年1期)2018-06-26
摄影之友(影像视觉)(2017年1期)2017-07-18
