
装载船吃水深度传感器气动头的研究与设计
2018-03-14 03:44:28
制造业自动化 2018年2期
(无锡气动技术研究所有限公司,无锡 214072)
0 引言
装载船是海上货运的基本运载工具,在世界各国的货运领域占据着极其重要的位置。装载船在海上安全航行的首要条件是船体的平衡性,为了达到这一平衡要求,在码头装货时必须要使船体各个部位的吃水深度基本一致,这就需要在装载货物时随时检测不同位置的吃水深度和平衡状况,装载船吃水深度传感器就是为这一目的而设计。传感器可分为二部分:一是气动头部分,它包括气泡发射装置、海水止回装置、过压保护装置,二是信号放大处理装置。而本文着重介绍的是这一传感器的气动头部分,它利用气动头发射气泡,将气泡直通船底海水,我们知道水越深气泡流过的气阻就越大,通过在气动头上测量气阻的压力大小,我们就能测出船底离水平面的深度。现在国内尚未有利用气动原理的测量传感器,为此我公司展开了此项研究。
1 装载船吃水深度传感器气动头的设计构想
如图1所示,将传感器气动头分成过压保护装置、气泡发射装置、止回装置。过压保护装置放在气动头的上层,在它的上方将安装信号放大处理装置,这样结构更为紧凑;气泡发射装置放在气动头的下层,以便发射的气泡便捷地通向船底;中层就放置气泡发射装置。这样整个传感器做成一个筒形,如果算上信号处理装置,这样一共是四层。
气泡发射装置的作用是将气源恒压稳流,输出恒压的大小处决于想要测量的装载船的最大吃水深度,吃水越深,输出恒压越高,反之越低,一般比最大吃水深度大0.05MPa即可。为了节约能源,降低成本,输出的气流不宜太大,只要保持最小的连续气流即可,如果流量不连续则测量精度就会受到影响。
船在海里,由于经常有海浪,它会使船体的吃水深度瞬间变大,而由海浪引起的吃水深度瞬间变大,其实不是真实的吃水深度,为了提高测量精度,我们应该将海浪屏闭,止回装置就是为此而设计。
虽然设置了止回装置,但是由于海浪的瞬间变化快,以及机械装置的反应相对滞后,仍有可能由于海浪冲击而使传感器的压力瞬间高于设定值,这样就有可能损坏信号放大器的处理芯片,过压保护装置就是为了把气动头的最大测定气压限定在一个规定的气压值以内,超过此值时使之无法测量但不会损坏传感器,当低于此值时又会全面恢复测量功能。这是避免因海浪引起传感器损坏的双重保护功能设计。
图1 装截船吃水深度传感器气动头原理图
2 气泡发射装置结构
进气口的压力一般在0.4MPa~0.6MPa,为了实现恒压稳流,必须进行精密调压设计,只有压力稳定流量才能稳定,因此就要利用减压阀的原理,使用膜片机构和闭路反馈系统,如图2所示,装置主要由上阀体1、上弹簧2、膜片组件3、阀芯4、下弹簧5、下阀体6、阀芯座7和节流阀8等组成,上下弹簧要经过精密计算和试验,使上弹簧作用在膜片组件上的力却好能顶开阀芯一定的距离,从而产生一个理想的输出压力。其工作原理是:如果输入口压力增加,阀芯将增加向上顶的力,从而减小阀芯口的开度,而使输出流量减小以保持压力不变;如果输入口压力降低,阀芯将减小向上顶的力,阀芯开度增加以提高输出流量,从而起到稳压作用。稳压后的气源经节流阀8调节后,变成一个持续的小流量气源送往下一节止回装置,并经止回装置流向船底海水之中。
图2 气泡发射装置
3 止回装置
止回装置主要由上阀体1、平衡活塞2、阀芯3、下阀体4、阀芯座5、平衡弹簧6组成。将作用在活塞上的压力和下面的平衡弹簧经过精确计算,确定平衡活塞直径大小,以保证作用在平衡活塞2上的压力能打开阀芯3,使气泡发生口、气泡发射口和过压保护装的三个气口相互连通,此时气泡发射装置经节流阀均匀流出的气流通过止回装置底部气泡发射口流向船的底部海水之中,如果船底处在水平面十米的位置,那么船底出气口的气阻就是0.1MPa,压力传感器将显示0.1MPa的气压,如果船底出气口的水深是水平面以下20米,那么压力传感器的示值应该是0.2MPa。由于装载船的承载量很大,各点吃水深度的变化即使很小,也会产生很大的重量偏差,因此传感器需要控制传感精度,这样仅依靠精密压力表就达不到使用要求,因此需要对压力信号进行信号放大处理以满足精度要求。
当船体遭受海浪冲击时,气泡发射口的气压将突然升高,使平衡活塞下端的气压上升,平衡活塞随即上抬,压力指示器接口与气泡发射口的联通被切断,使气泡发生口、气泡发射口和过压保护装的三个气口互不相通;当海浪过后气泡发射口气压下降,平衡活塞随之下移,阀芯下降,压力指示器接口与气泡发射口被重新打开,气泡发生口、气泡发射口和过压保护装的三个气口被重新联通。这就是止回装置的工作原理和功用。

图3 止回装置
4 过压保护装置
如图4所示,过压保护装置主要由调压螺钉1、上弹簧2、上阀体3、膜片组件4、缷压螺钉5、阀芯6、阀芯底座7组成,压力信号从下部气口读入,从顶部气口读出送信号放大处理。调节调压螺钉1,设定膜片的弹簧压力,使之在额定气压下产生一定的阀芯开度,上下气口相互贯通,从而将下部的读入气压经过阀芯开口从上部气口读出,形成正常的测量功能,但当下部输入气口的气压突然变大时,气压作用在阀芯下部,使阀芯向上顶的作用力加大,打破了原来由上弹簧2产生的平衡力,阀芯上移,阀芯与下阀体之间的阀嘴关闭,气压读入口与气压读出口的通路被切断,从而保护了信号放大处理装置,当读入口气压降低时,读出口相对于入口的高压将会通过缷压螺钉5排出,从而使传感器恢复正常工作。
图4 过压保护装置
5 测试结果
我们根据上述原理制作了图5样机,并对样机进行了相关测试;装载船的吃水深度通常不大于20米,为了确保测量的精度,我们将输出压力设定为0.25MPa,将气泡流量设定为167ml/min,然后从楼房的三楼向下竖起直径80mm,高10m的塑料管,塑料管内灌满水,记录水深。
根据管道直径与管内流量及速度的关系,计算出不受气阻影响的气泡发管直径,设定流量Q为167L/min,流速V为5mm/s,按计算公式:
D:气管管径(mm);
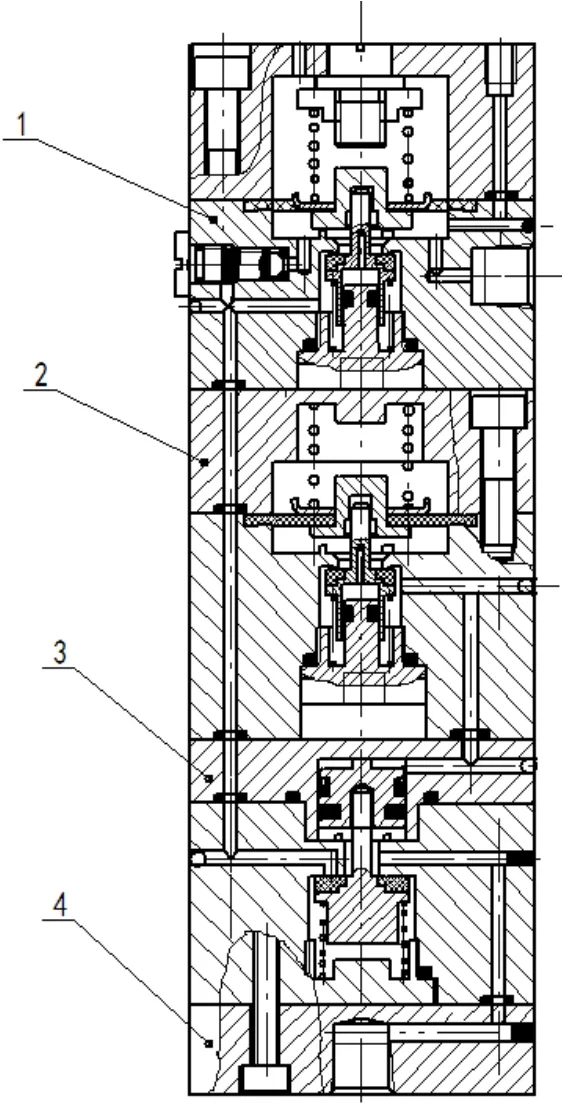
图5 气动头总装图
Q:在管道内的气流量(m3/h);
V:管道内的流速(m/s)。
计算得到管子直径应不小于8.4mm,如果小于该直径,气阻将对测量气压产生影响,故取插入塑料管内的管子内径为10mm的管子,直通塑料管底部,管子另一头接在气动头气泡发射口,然后通气向塑料管底部发射气泡,从气动头读取口读取压力信号。经多次测试比对,实际水深与读取的压力值误差小于2mm。
6 结束语
装截船吃水深度传感器气动头,巧妙地利用气压原理,方便地实现了吃水深度的测量,同时经过结构设计将测量和过载保护有机地结合在一起,它结构紧凑,布局合理,使用方便,实用效果良好。
[1]吴筠.气动工程手册[M].国防工业出版社,2000.
[2]徐炳辉.气动手册[M].上海科学出版社,2005.
猜你喜欢
欣漾(2024年2期)2024-04-27 15:19:49
微处理机(2024年1期)2024-03-04 05:11:02
幼儿画刊(2021年5期)2021-12-02 04:24:04
新潮电子(2021年7期)2021-08-14 15:53:12
建材发展导向(2021年13期)2021-07-28 07:14:48
模具制造(2019年4期)2019-06-24 03:36:46
儿童故事画报·发现号趣味百科(2019年9期)2019-02-02 04:12:19
四川水力发电(2018年6期)2018-12-10 05:00:52
通信电源技术(2016年1期)2016-04-16 04:57:24
浙江大学学报(工学版)(2015年7期)2015-03-01 01:18:55
