
基于QD75P4定位模块三轴运动控制的设计与实现
2018-03-14 03:44:23
制造业自动化 2018年2期
(华南理工大学广州学院 电子信息工程学院,广州 510800)
0 引言
运动控制是指对机械运动部件的位置、速度等进行实时的控制,使其按照预期的运动轨迹和规定的运动参数进行运动。目前,运动控制器在工业上的应用越来越多,主要涉及到的应用领域有产品的加工、装配、以及后期组装等。
QD75P4定位模块是三菱公司4轴开路集电极系统脉冲输出定位控制器,具有定位范围广,定位精度高(微米级)、速度快(200kHz)、启动时间短(0.2毫秒)等特点,可实现位置、速度控制与PLC、驱动装置组合实现复杂的逻辑控制和运动控制要求。
1 系统控制要求
系统将由前工序运送来的物品从某固定初始位移动到指定位进行码垛摆放整齐,系统结构图和物品码放示意图如图1所示。
系统由三个互相垂直的丝杠组成,采用三台伺服电机负责带动三个方向的丝杠进行运动。分别实现X、Y、Z三个方向上的运动,其中X、Y两轴负责平面运动,Z轴负责上下运动。
系统控制要求:1)系统精度达到毫米级;2)系统具有良好的操作性;3)系统可实现任意的直线插补;4)系统具有快速响应性。
2 PLC控制系统设计
1)硬件设计

图1 系统结构图和物品码放示意图

图2 控制系统硬件的结构图

图3 PLC控制系统硬件设计接线图
以Q03UDE CPU PLC为主控制器,对整个系统的逻辑和定位运动进行控制和管理;智能定位模块QD75P4执行对定位参数进行设置,输出指令脉冲发送给三个伺服放大器,轴2、3、4分别控制X、Z、Y方向运动;伺服放大器MR-J3-10A负责驱动伺服电机HF-KP13,以完成三个方向上的运动,电机编码器的分辨率为262144脉冲/转的绝对位置编码器。控制系统硬件结构图如图2所示。
PLC控制系统硬件设计接线图如图3所示。
2) 软件设计
包括两部分:PLC程序设计和定位模块QD75P4参数设置,其中PLC程序完成系统的逻辑和定位运动进行控制。物品码放流程图如图4所示。
QD75P4参数设置的方法有两种(监视数据用户不能修改):1)PLC顺控程序设置;2)专用软件(GX Configurator-QP、GX Works2软件等)设置。若采用PLC顺控程序设置参数将会使程序变得复杂,增加扫描时间。
本系统采用GX WORKS2 软件,其优点:既可以进行PLC程序编程,又带QD75P4定位参数设置功能。
3 三轴运动控制QD75P4参数设置

图4 物品码放流程图
QD75的常用参数包括基本参数、详细参数、回零(OPR)参数以及定位数据和块启动数据。现将三轴运动控制重要参数和数据加以说明,其中轴2和轴4两台电机负责X、Y两个方向上的动作,轴3负责Z方向的动作。
3.1 主要参数
Pr.1单位设置:3(单位:脉冲数);
Pr.2电机每转脉冲数(Ap): 4000(单位:脉冲数);
Pr.3电机每转移动量(Al): 4000(单位:脉冲数);
Pr.43 OPR 方法:0(近点狗方法);
Pr.44 OPR 方向:0(正方向);
Pr.46 OPR 速度起动:1(单位:pulse/s);
说明:对于Pr.2和Pr.3参数的设定,要结合驱动器MR-J3-10A的参数和HF-KP13电机参数而定。设伺服放大器电子齿轮比CMX/CDV=8192/125(计算方法见后),则对于QD75P4,对应的电机每转脉冲数Ap为:

在GX WORKS2软件中设置QD75P4模块基本参数、详细参数和原点回归参数如图5所示。

图5 QD75P4模块基本参数、详细参数和原点回归参数
3.2 定位数据和块起动数据
用于设置“主要的定位控制”用的数据,建立独立动作过程。各个轴可以设置1~600个定位数据项目,定位数据项目包括:运行模式、控制方式、插补对象轴、加速时间、减速时间、定位地址、圆弧地址、指令速度、停留时间、M代码。三轴定位数据如图6~图8所示。

图6 X轴的定位数据

图7 Y轴定位数据
控制方式为ABS直线(3-轴线性插补控制),只需设置X轴即轴2的块起动数据。具体参数设置如图9所示。
4 伺服放大器重要参数设置
已知HF-KP13伺服电机转速为N0=3000转/分钟,编码器分辨率为Pt=262144pulse/每转;f为伺服放大器的输入脉冲频率(pulse/s),QD75P4为集电极开路方式,最大输出脉冲为200kpulse/s,即f=200kpulse/s。
为使在QD75的最大输出脉冲指令下使伺服电机转动,使用伺服放大器的电子齿轮,设定电子齿轮如下:


图8 Z轴定位数据

图9 X轴的块起动数据

伺服放大器重要参数设置:PA01: 0,位置控制模式、PA06:32767,电子齿轮分子、PA07:500,电子齿轮分母。
5 X轴定位控制PLC程序
X轴高级定位起动数据控制程序如图11所示。
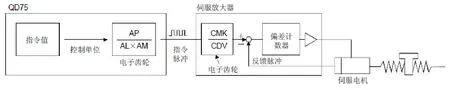
图10 电子齿轮比示意图

图11 X轴定位控制PLC程序
【】【】
6 结论
三菱QD75定位模块可以准确定位和运行,但其参数和程序较复杂,三菱交流伺服驱动的性能非常优良,功能强大,使用灵活,通过QD75定位模块可以实现多轴复杂控制和运动控制要求,控制准确,运行可靠程度高。
[1]范其明.基于QD75MH4的三轴运动控制系统设计[J].科技创新 2013.
[2]赵乃辉,赵子龙.基于QD75D4 定位模块点胶图形的开发[J].电子工业专用设备,2011.
[3]曾志清,毛虹,韩永刚.QD75定位模块在成型机上的应用[J].轮胎工业,2004.
猜你喜欢
微特电机(2020年11期)2020-12-30 19:42:32
中国设备工程(2020年16期)2020-08-28 09:04:16
科学技术创新(2020年20期)2020-08-11 04:10:38
通信电源技术(2018年8期)2018-10-15 07:02:20
电子制作(2018年17期)2018-09-28 01:57:00
通信电源技术(2018年3期)2018-06-26 06:33:36
电脑知识与技术(2016年22期)2016-10-31 20:38:41
工业设计(2016年6期)2016-04-17 06:42:53
江西通信科技(2015年3期)2015-12-05 05:52:05
山西大同大学学报(自然科学版)(2014年6期)2014-01-23 02:00:17
