基于FMEA和FTA的脚踝康复机器人可靠性分析
2018-03-08 05:38:45邓超陶志奎
机器人技术与应用 2018年1期
邓超 陶志奎
(华中科技大学机械科学与工程学院,武汉,430074)
0 引言
随着康复理论和康复机器人技术的发展,脚踝康复机器人应运而生[1-2]。踝关节扭伤是骨科临床常见的运动伤,其发生率在下肢扭伤中居第二位。这是因为:一方面踝关节的生理结构较为灵活,另一方面踝关节在剧烈运动中承受了较大的载荷和冲击,使得踝关节扭伤在日常生活中较为常见。
近年来,针对踝关节的康复运动问题,国内外很多高校和医疗机构都开展了相关研究工作,并取得了一些有价值的研究成果。美国罗格斯大学(Rutgers University)研制出六自由度脚踝康复系统,该系统采用气压驱动方式,通过电子阀控制康复器各参数,从而实现人体踝关节跖屈/背屈、内翻/外翻和内收/外展动作模拟[3];新西兰奥克兰大学研制出三个旋转自由度脚踝康复训练机器人;韩国庆尚大学研制出可重构气动双运动平面四自由度踝关节康复机器人[4]。
在中国,浙江大学研制出三自由度踝关节康复医疗外骨骼系统,河北工业大学研究出3-RSS/S踝关节康复并联机器人,山东省青岛市第四人民医院研制出踝关节CPM康复仪[5-7]。
这些脚踝康复机器人一般采用患者与机器人直接接触的训练方式,由于机器人系统结构复杂,自由度较多,再因多采用气压传动,输出功率不稳定等因素,常见综合导致康复机器人运动精度不稳定等问题。这些问题都是患者在使用脚踝康复机器人过程中的故障隐患,一旦机器人发生故障或者停止工作,可能对患者脚踝造成更严重的损伤。因此,机器人的安全性、运动平稳性、可靠性对于特殊使用对象尤为重要。
本文以奥克兰大学研制的脚踝康复训练机器人[8]为研究对象,基于FMEA分析法和FTA分析法,对脚踝康复机器人系统进行可靠性分析,明确关键故障模式、故障原因和关键零件,并提出改进意见,以降低机器人故障概率,减少其对患者产生损伤的可能性。
1 结构功能分析
脚踝康复机器人具有三个旋转自由度,可以帮助患者进行脚踝康复训练,在训练过程中能实时监测运动数据并控制运动参数(速度和角度等)[9]。
该机器人系统主要包括机械系统、气动系统和电控系统三大部分,其中电控系统和气动系统为气动件提供电力和空气压力,从而控制气动件的长度,并根据四根气动件的长短变化带动脚踏板运动,从而使踝关节能够进行背屈/趾屈、内翻/外翻、内收/外展以及三自由度的混合训练,同时还可根据检测结果调整运动参数,以达到踝关节康复训练效果。
机械系统主要由支座组件、驱动组件和活动组件三大部分组成,如图1所示。支座组件是整个系统的框架,为驱动组件和活动组件提供支撑;驱动组件通过空气的传输带动气动件的伸缩,进一步将动力转送至活动组件;活动组件将驱动组件的动力进一步转化成机器人三自由度的运动,从而带动病人进行脚踝康复训练。
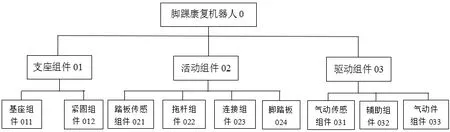
图1 脚踝康复机器人结构树
分析脚踝康复机器人各功能单元的工作情况、相互影响及相互依赖关系,建立其功能框图(如图2所示),以逐层分析故障模式对其产生的影响。
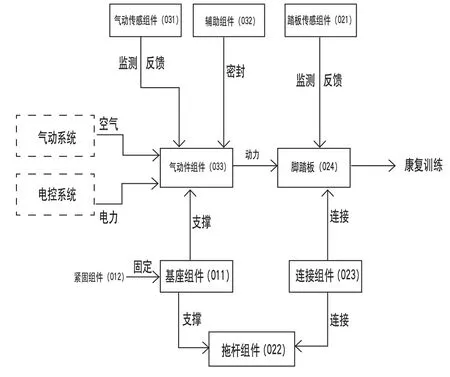
图2 脚踝康复机器人各功能单元工作示意
2 FMEA 分析法
故障模式影响及危害性分析(Failure Mode Effects and Criticality Analysis,简称FMECA或FMEA)是分析系统中每一构件所有可能产生的故障模式及其对系统造成的所有可能影响,并根据每一个故障模式的严重程度、检测难易程度以及发生频度予以分类的一种归纳分析方法。本文中,该分析方法通过对康复机器人系统中的所有组成部分进行故障模式、故障影响和危害度分析,明确系统设计的关键部分和薄弱环节,并提出相应改进意见和措施,为系统可靠性分析提供基本依据[10]。
2.1 故障模式分析
本文首先约定脚踝康复机器人的严酷度类别和故障模式发生概率等级。
严酷度类别是由脚踝康复机器人的安全性、功能性丧失或功能性下降等方面总结而来(如表1所示)。
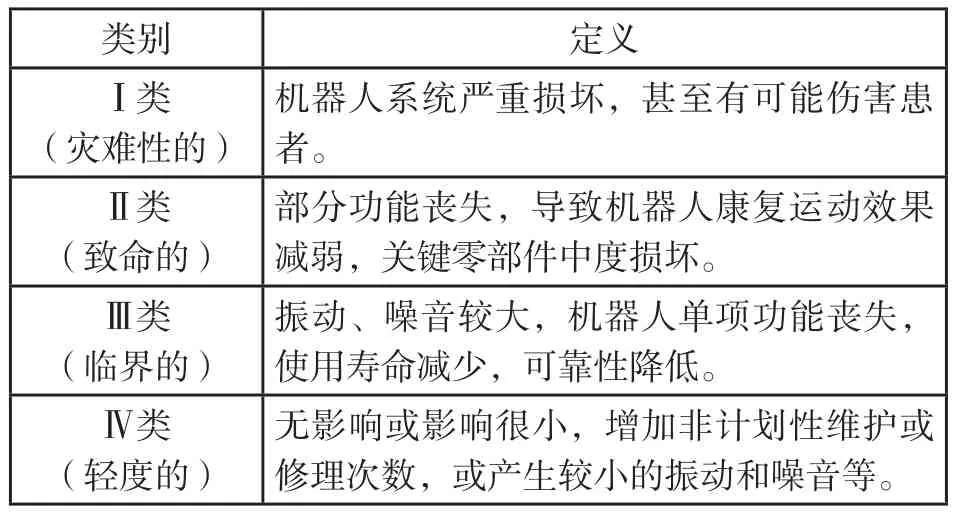
表1 脚踝康复机器人严酷度类别及定义
故障模式发生概率等级分为A、B、C、D、E 五个等级。判断公式为:

故障模式发生概率等级由μ值决定,其判断标准如表2所示。
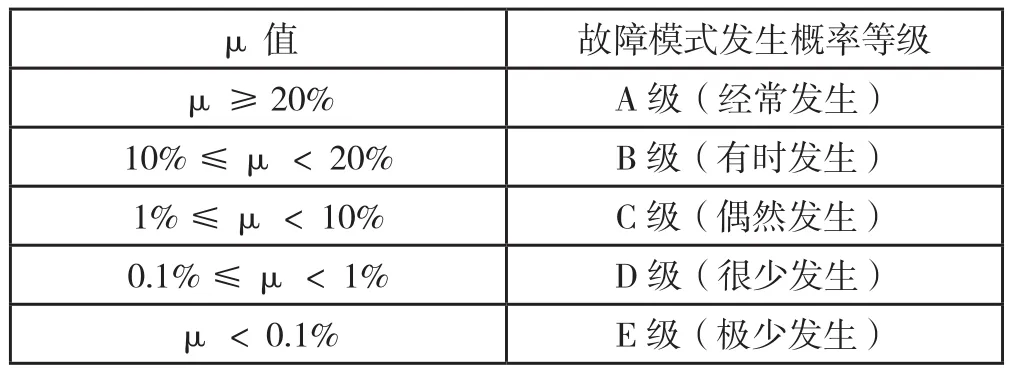
表2 故障模式发生概率等级判断标准
2.2 故障模式影响分析
脚踝康复机器人故障模式影响分析和故障影响概率推荐值,如表3、表4所示。
2.3 危害度分析
危害度分析是对脚踝康复机器人每一个故障模式的严重程度及该故障模式发生的概率所产生的综合影响进行分类,以全面评价机器人系统中所有可能出现的故障模式造成的影响。
假设脚踝康复机器人的故障模式危害度 是第 个故障模式所发生的某严酷度等级下的危害度,则有:

式(1)中,故障模式百分比 表示故障模式 发生故障的百分比,各故障模式频数比可根据故障率原始数据、经验、使用数据及查询相关手册得到。通过查询故障模式分布手册(Failure Mode/Mechanism Distributions 1991, 简称FMD-91),可以得到角接触轴承各故障模式频数比为:疲劳形变13.36%、疲劳断裂13.36%、胶合44.4%、磨损28.8%。
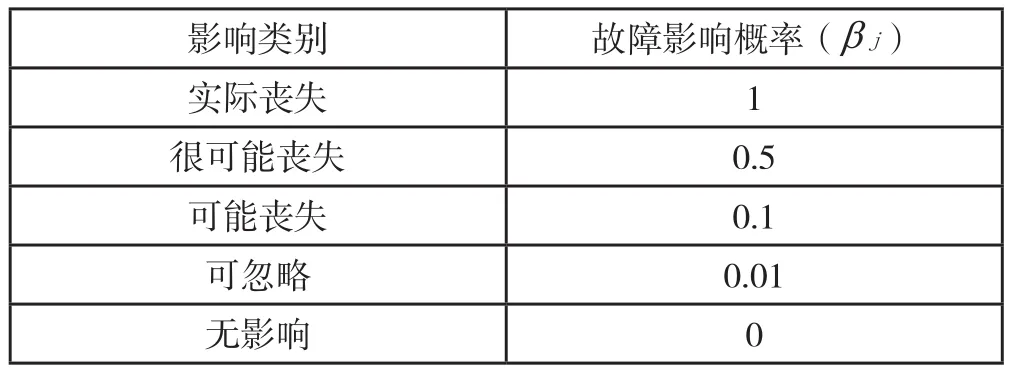
表4 脚踝康复机器人故障影响概率推荐值
是故障模式 发生故障而导致脚踝康复机器人任务失败的条件概率,其值通常可按照表4中推荐值进行定量估计。如“疲劳形变、疲劳断裂、胶合、磨损”的故障影响概率可分别表示为:
危害度 是脚踝康复机器人在给定的严酷度类别和任务阶段下的各种故障模式危害度之和。脚踝康复机器人故障模式危害度分析如表5所示。
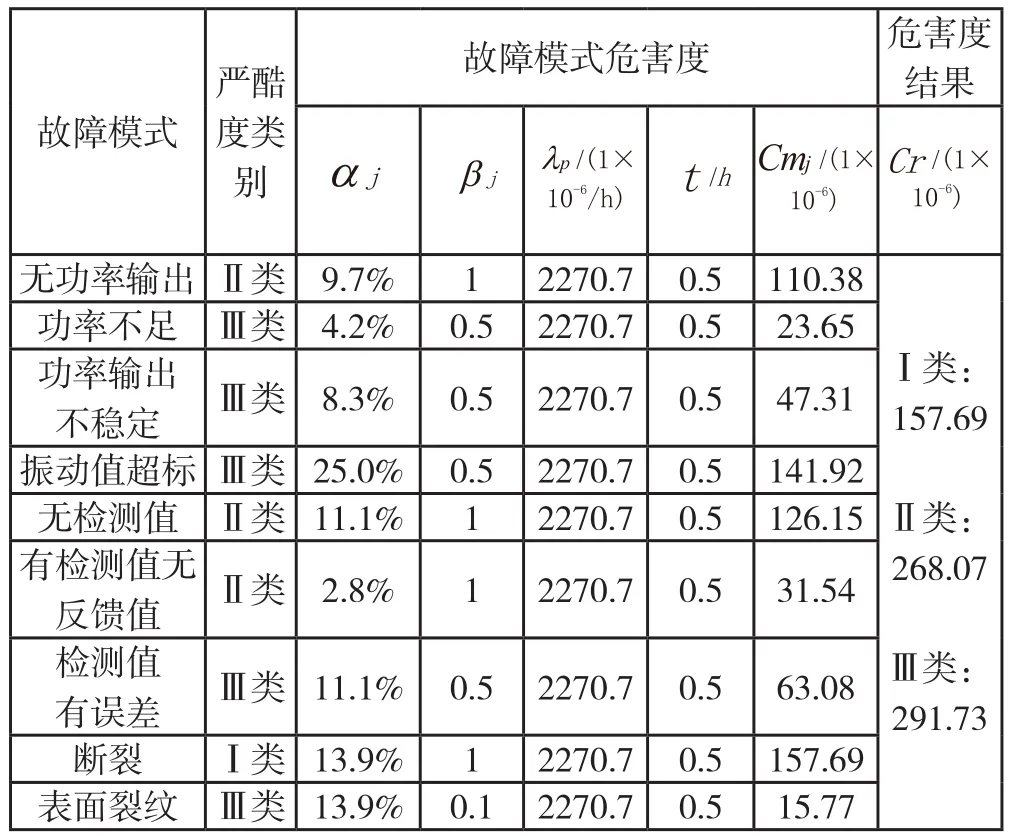
表5 脚踝康复机器人故障模式危害度分析
根据表5中脚踝康复机器人故障模式危害度和危害度结果,可以对脚踝康复机器人的故障模式危害性进行定性分析和定量分析。定性分析方法是将每个故障模式发生的可能性分成离散的级别,然后分析人员按所定义的等级对每个故障模式进行评定。
本文根据表2所列出的5个不同的等级,首先对脚踝康复机器人的故障模式发生概率等级进行评定,然后再应用危害性矩阵对每个故障模式进行危害性分析,如图3所示。
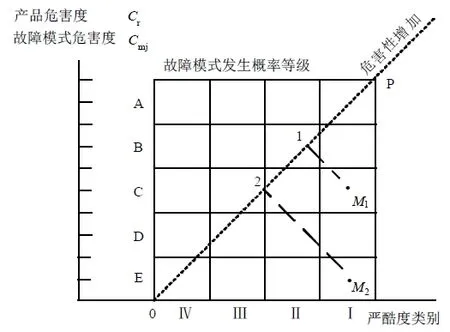
图3 脚踝康复机器人故障模式危害度矩阵
在定性分析方法中,横坐标轴中的Ⅰ类严酷度类别对应的横坐标长度应与纵坐标轴中故障模式发生概率等级A对应的纵坐标长度一致。在定量分析方法中,横坐标轴中的Ⅰ类严酷度类别对应的横坐标长度应与纵坐标轴中的最大故障模式危害度值或产品危害度值一致。图3中所标记的坐标点沿对角线到原点的距离 ,可通过几何推算得到如下计算公式:

按照公式(2)对故障模式分布点沿对角线方向到原点的距离进行计算,并对其排序,可得出脚踝康复机器人故障模式危害度分析表,从而找到危害度较大的故障模式,如表6所示。
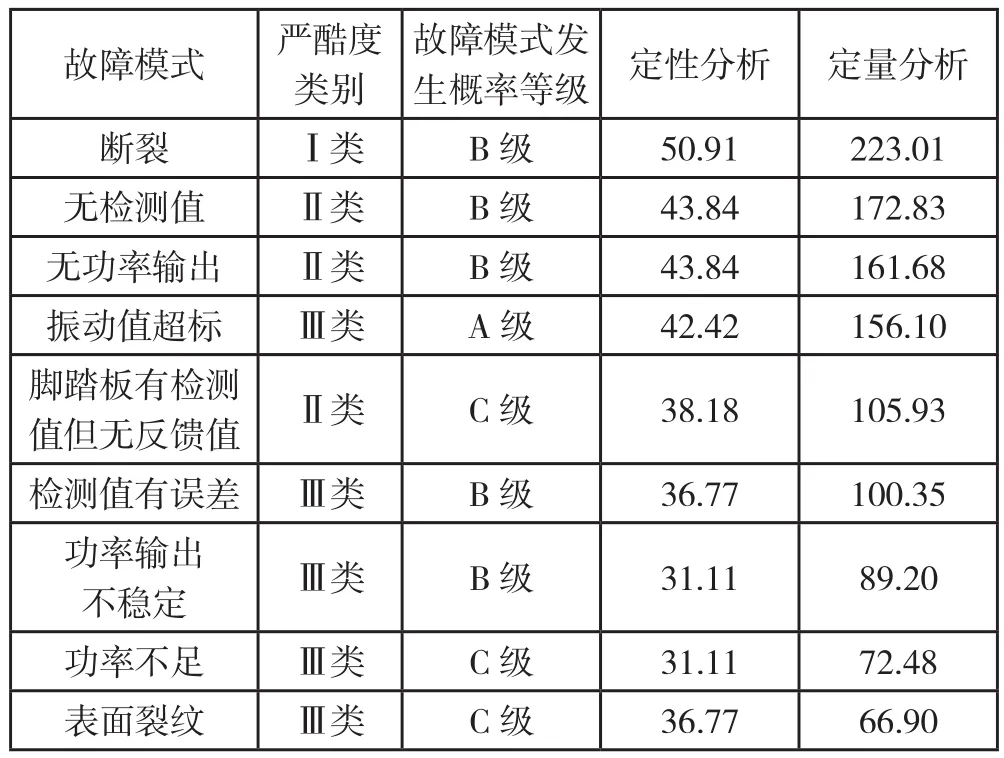
表6 脚踝康复机器人故障模式危害度分析
从表6中排序可知,应重点关注断裂、无检测值、无功率输出、振动值超标、脚踏板有检测值但无反馈值等故障模式。
3 FTA 分析法
故障树分析法(Fault Tree Analysis, 简称FTA)适用于大型复杂系统的可靠性和安全性分析,其通过定量和定性分析方法可确定系统故障形成原因的各种组合方式和发生概率。
FTA是以系统所不希望发生的一个事件(顶事件)作为分析目标,通过逐层向下追溯所有可能的原因,建立一棵故障树,再定性分析各底事件对顶事件产生影响的组合方式和传播途径,识别可能的系统故障模式,以及定量计算这种影响的轻重程度,从而推算出致使系统失效的概率[11-12]。
本文对脚踝康复机器人系统进行故障树分析时,重点分析脚踝康复机器人机械系统本身的潜在故障模式,因此对与气动系统和电控系统有关的故障事件作简化处理。在对潜在故障模式进行定量分析时,故障模式发生概率统一取值为
通过FMEA分析法,我们可以得到脚踝康复机器人系统的故障模式。其中,机器人功率输出不稳定,检测值有误差,脚踏板有检测值但无反馈值的故障模式危害度排序都比较高,分别为89.20,100.35和105.93,这些都可归结为脚踝康复机器人输出不满足训练要求这一事件,并将这一事件定为顶事件1。振动值超标的故障模式危害度为156.10,排序也很高,定为顶事件2——脚踝康复机器人振动幅度过大。 虽然无功率输出和功率不足的危害性排序也很高,但两者都为脚踝康复机器人输出功率不正常的输入事件,故定为顶事件3——脚踝康复机器人输出功率不正常。本文仅对顶事件1进行定性和定量分析。
3.1 顶事件1故障树的建立
在建立故障树时,根据顶事件的边界条件,零部件的底事件故障只需要分析至零件的故障模式即可。现做出如下条件约定:
1)不考虑人为操作失误引起的故障;
2)不考虑外部环境的影响,如温度变化、气压、介质温度等因素;
3)非机械系统(如气动系统、电控系统等)原因导致顶事件发生的原因事件在建立故障树时不再做进一步分析;
4)不考虑外部破坏引起的故障;
5)部分结构件牢固、可靠,故障率极低,建树过程中不考虑。
根据上述分析,导致顶事件1发生的第一层直接原因有:脚踏板不能运动或运动困难;脚踏板不按规定运动轨迹运行;机器人功率输出不稳定。
顶事件1的故障树及中间事件E19的故障树分别如图4和图5所示。
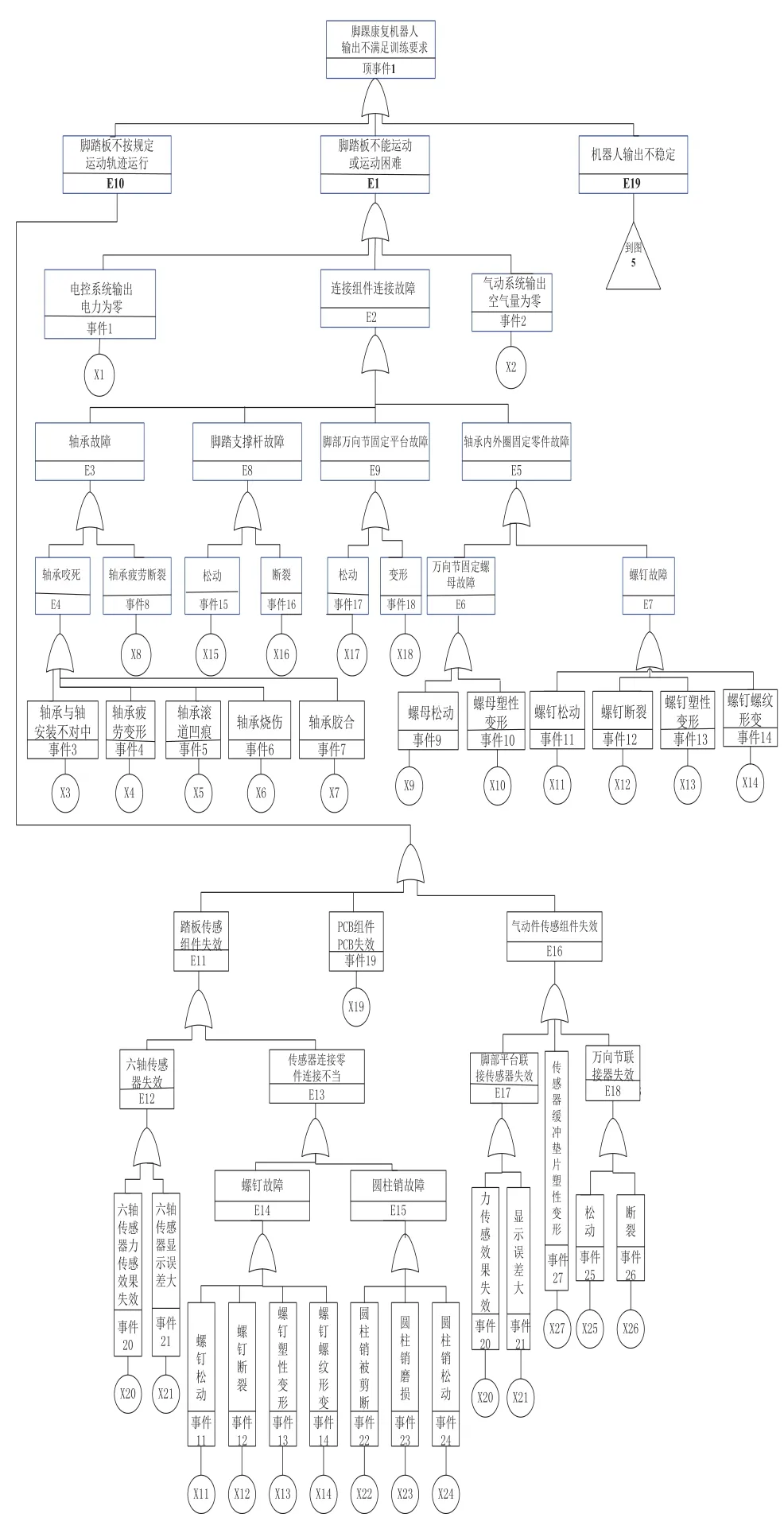
图4 顶事件1的故障树
3.2 顶事件1故障树的定性分析
故障树定性分析在于寻找导致顶事件发生的所有可能的故障模式,即导致顶事件发生的若干底事件的集合。当这些底事件同时发生时顶事件必然发生,这样的集合称为割集。如果割集中的任一底事件不发生顶事件即不发生,则称为最小割集。
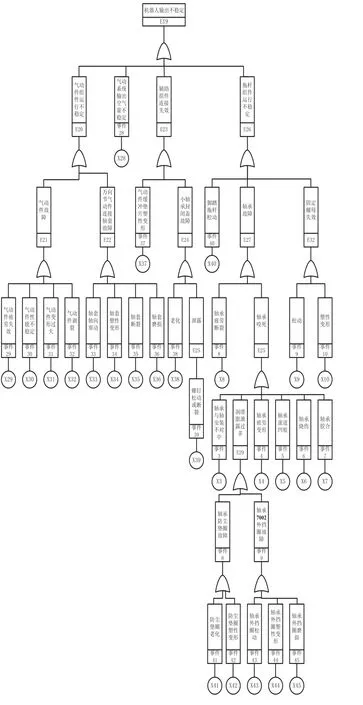
图5 中间事件E19的故障树
定性分析的主要任务就是确定所有最小割集,即包含最小数量且为最必须的底事件集。通过对图4故障树进行定性分析,最后得到顶事件1的所有最小割集为:{事件X1},{事件 X2},{事件 X3},{事件 X4},{事件 X5},{事件X6},{事件X7},{事件X8},{事件X9},{事件X10},{事件 X11},{事 件 X12},{事 件 X13},{事 件 X14},{事件 X15},{事 件 X16},{事 件 X17},{事 件 X18},{事件 X19},{事 件 X20},{事 件 X21},{事 件 X22},{事件 X23},{事 件 X24},{事 件 X25},{事 件 X26},{事件 X27},{事 件 X28},{事 件 X29},{事 件 X30},{事件 X31},{事 件 X32},{事 件 X33},{事 件 X34},{事件 X35},{事 件 X36},{事 件 X37},{事 件 X38},{事件 X39},{事件 X40},{事件 X41},{事件 X42},{事件X43},{事件 X44},{事件 X45}。
从定性分析结果可以看出,顶事件1总共有45个一阶割集。当以上任一最小割集发生时,顶事件也将发生。
3.3 顶事件1故障树的定量分析
故障树的定量分析,即计算出底事件的相对概率重要度,相对概率重要度越大,说明该事件引起顶事件发生的可能性就越大。
根据式(3)可得出顶事件1的故障发生概率计算式:
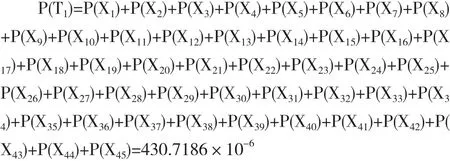
则顶事件1的故障概率函数为:
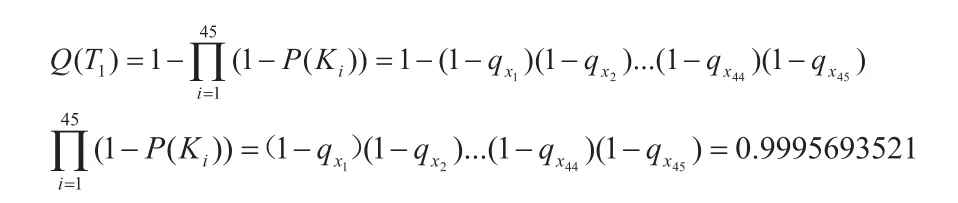
按照定性分析中对割集的排序,其各个割集的相对概率重要度计算公式如下:

其余割集的相对概率重要度可通过类似计算公式得出。
第i个底事件的相对概率重要度表示,当第 个底事件发生概率微小的相对变化而导致顶事件发生概率的相对变化率。
通过查表和计算,得出顶事件1的底事件相对概率重要度排行,如表7所示。从表7中可以看出,气动件和轴承零件的失效是导致顶事件1的主要原因,因此要重点控制气动件和轴承零件发生故障的概率。
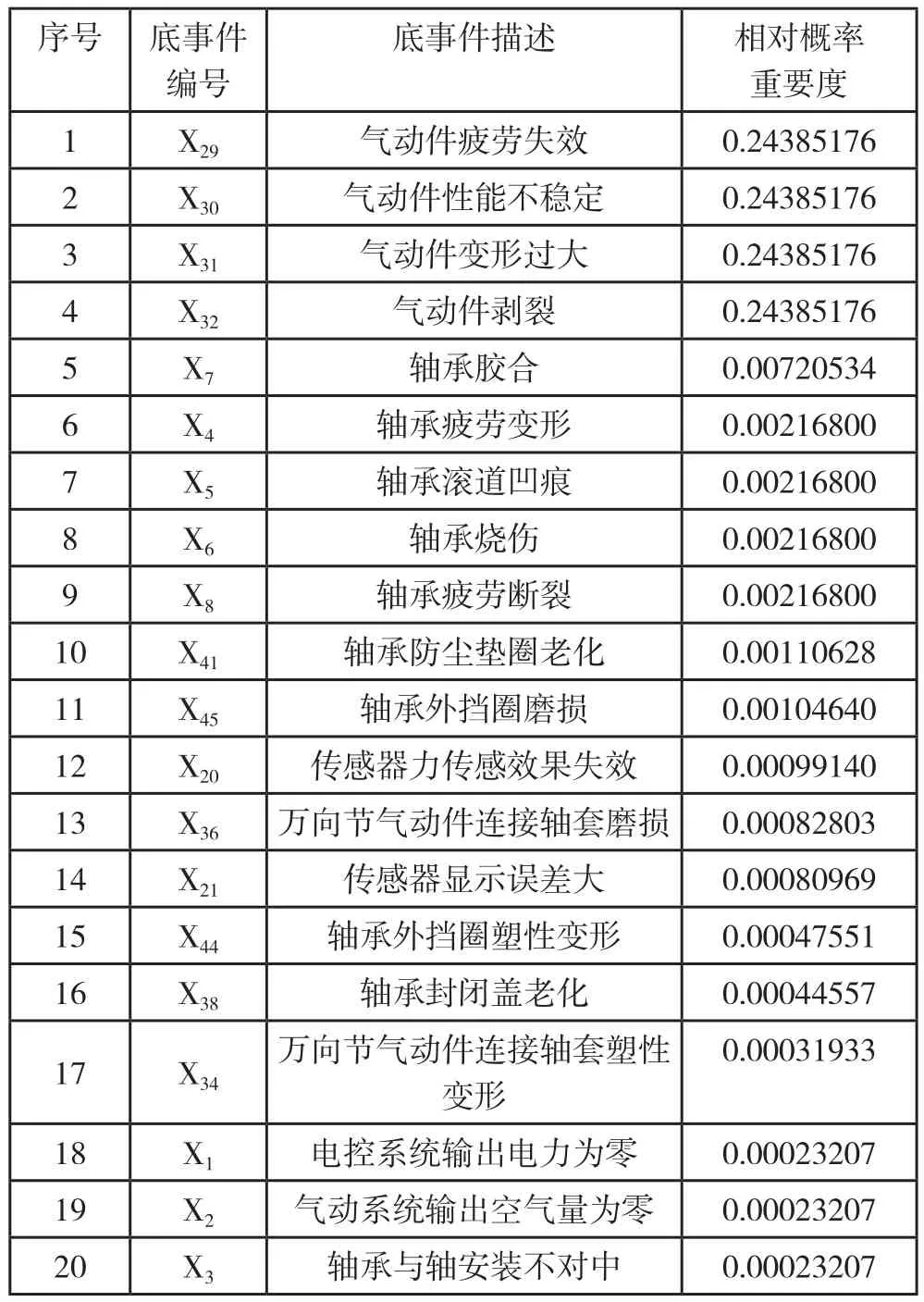
表7 顶事件1的底事件相对概率重要度排行
4 关键故障模式的改进意见
本文利用FMEA和FTA分析法对脚踝康复机器人进行分析,根据零件故障模式危害性分析及故障模式严酷度类别综合得出导致机器人关键故障模式的因素。另外,从FTA分析法中,也发现导致顶事件发生的可能性很大的关键故障模式,本文针对关键故障模式,提出改进意见,如表8所示。
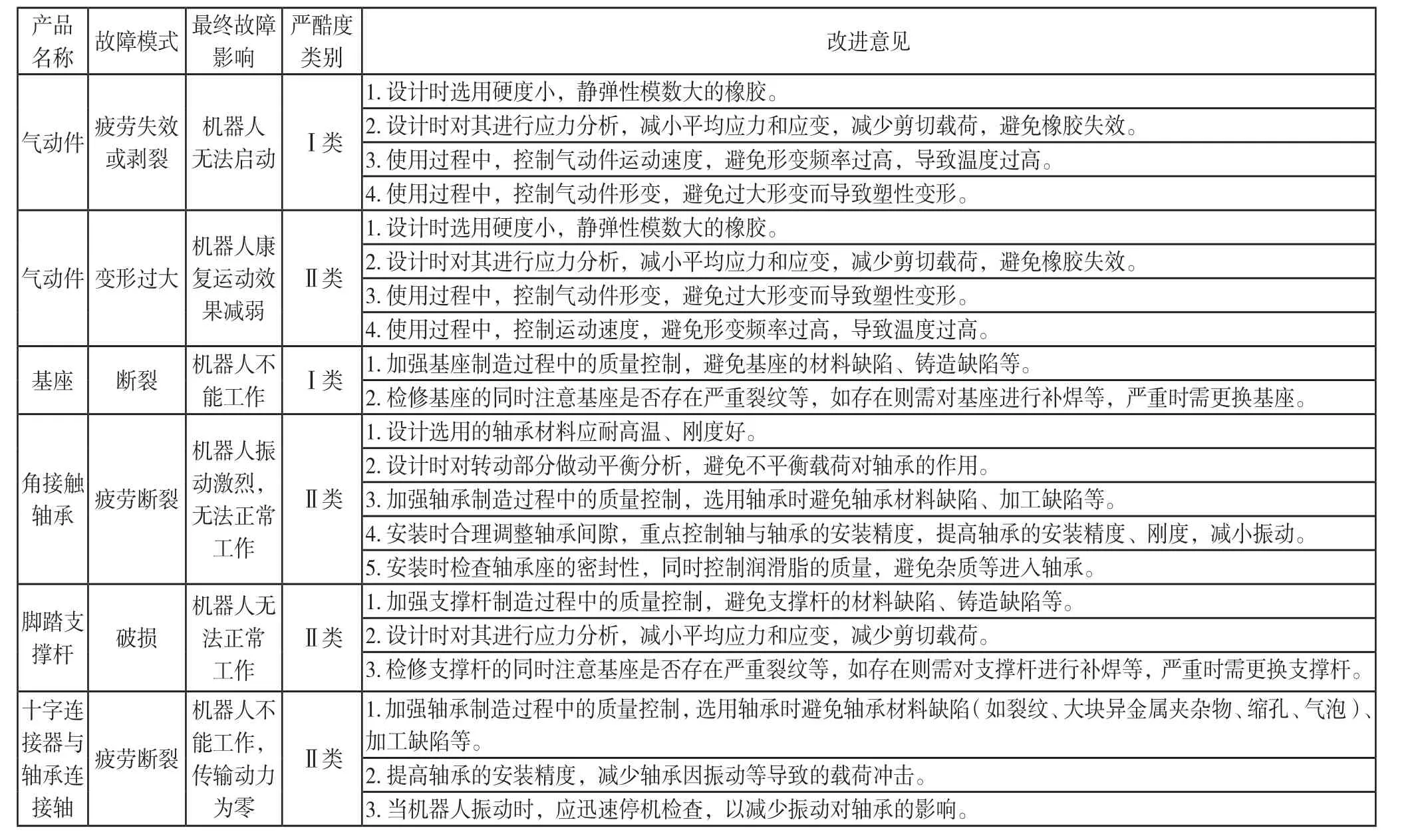
表8 脚踝康复机器人关键故障模式的改进意见
5 结论
由于脚踝康复机器人结构复杂,因此发现其关键故障模式并对相应故障模式进行分析非常困难。本文利用FMEA和FTA方法对脚踝康复机器人的可靠性进行分析,找到以气压为驱动方式的脚踝康复机器人的关键故障模式,即气动件和轴承零件的故障模式,并针对气动件和轴承零件的设计提出改进意见,为机器人系统的优化设计提供依据。
[1] 李光林,郑悦,吴新宇,等.医疗康复机器人研究进展及趋势[J].中国科学院院刊,2015 (6)∶793-802.
[2] 潘志超,徐秀林,肖阳.下肢康复机器人研究进展[J].中国康复理论与实践,2016,22(6)∶680-683.
[3] Yoon J,Ryu J.A Novel Reconfigurable Ankle/Foot Rehabilitation Robot [C].IEEE International Conference on Robotics and Automation, 2005∶2290-2295.
[4] Yakimovich T, Kofman J, Lemaire E D. Design and Evaluation of a Stance-Control Knee-Ankle-Foot Orthosis Knee Joint[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering,2006,14(3)∶361-369.
[5] 张煜.踝关节康复医疗外骨骼系统开发研究[D].杭州∶浙江大学,2010.
[6] 王瑞利.基于虚拟场景的踝关节主动康复策略研究[D].天津∶河北工业大学,2007.
[7] 纪庆龙.智能型踝关节CPM康复器的研究[D].青岛∶青岛大学,2012.
[8] Tsoi Y H,Xie S Q. Design and Control of a Parallel Robot for Ankle Rehabilitation[J]. Intelligent Systems Technologies and Applications , 2010,8(1/2/3/4)∶100-113.
[9] Zhang M M. Improving Effectiveness of Robot-Assisted Ankle Rehabilitation via Biomechanical Assessment and Interaction Control[D]. New Zealand∶The University of Auckland, 2016.
[10] 张蓉,王春洁.基于FMEA和FTA的三自由度直角坐标机器人系统可靠性仿真分析[J].机械科学与技术,2006,25(6)∶651-654.
[11] 贾哲,金光明,陶龙.FTA在机器人故障诊断中的应用[J].装备制造技术,2008(9)∶84-85,91.
[12] 王改云,梁芬,朱名日,等.基于故障树的焊接机器人可靠性分析[J].微计算机信息,2008,24(6-2)∶272-273,302.
猜你喜欢
今日农业(2022年15期)2022-09-20 06:56:12
中老年保健(2021年7期)2021-08-22 07:42:36
基层中医药(2021年12期)2021-06-05 06:56:32
海峡姐妹(2020年12期)2021-01-18 05:53:26
养生保健指南(2019年4期)2019-12-17 08:18:41
创新作文(小学版)(2017年34期)2017-04-09 06:15:18
民生周刊(2016年9期)2016-05-21 12:11:19
中华骨与关节外科杂志(2016年6期)2016-05-17 06:11:12
中国民族医药杂志(2016年5期)2016-05-09 07:43:57
Coco薇(2015年5期)2016-03-29 22:39:05