激光星间链路快速捕获技术综述
2018-02-28 00:44林益明程竟爽何善宝王海红
航天器工程 2018年1期
林益明 程竟爽 何善宝 王海红
(1 中国空间技术研究院,北京 100094)(2 北京空间飞行器总体设计部,北京 100094)
激光星间链路(以下简称激光链路)具有精密测距与高速数传能力等特点,已成功应用于遥感卫星与中继卫星以及中继卫星之间的信息传输[1-2]。随着我国导航卫星全球组网的深入开展,激光链路将成为未来导航星座构建星间链路物理层的优选方式[3-4]。导航星座激光链路对建链时间要求很严(如采用时分体制的星间链路方案分配给单一链路的时隙小于10 s[5]),目前尚无应用于导航星座激光链路的快速捕获技术;而已有的激光链路捕获技术所需的捕获时间长达数十秒到上百秒[6-7],难以满足快速捕获要求。因此,有必要在对现有激光链路捕获技术进行调研分析的基础上,研究适合导航星座激光链路的快速捕获技术。
激光链路的建立过程一般分为初始指向、捕获与跟踪3个阶段[8],而其快速捕获的实现依赖于初始指向阶段激光星间终端(以下简称激光终端)的高精度指向和捕获阶段激光链路的快速扫描捕获。要提高激光终端的初始指向精度,就需要建立合理的激光终端指向误差模型,并采用合适的在轨标定方法对模型参数做出准确估计;要缩短激光链路的扫描捕获时间,就需要优化扫描捕获过程的相关参数,并针对中断恢复等特殊工况研究快速重捕获方法。
本文首先介绍激光终端的组成、工作原理及激光链路的建立流程,然后分别从激光终端指向误差分析与建模、激光终端指向误差在轨标定、激光链路扫描捕获参数优化以及激光链路中断恢复重捕获4个方面对国内外激光星间链路快速捕获技术进行综述,最后结合导航星座星间链路的特点提出研究建议,以促进激光链路快速捕获技术的发展和应用,为我国导航星座激光星间链路快速捕获的工程实现提供参考。
1 激光终端组成与工作原理
目前,激光终端按照其工作原理的不同可分为机械式激光终端和非机械式终端两类,其中机械式终端已成功在轨应用,而非机械式终端则处于地面研制阶段,尚未在轨应用,本文着重介绍机械式终端。典型机械式激光终端的组成如图1所示[9]。
激光终端的信标光路包括接收与发射光路两部分。其中,接收光路一般由布置在光学平台上的望远镜、粗指向机构平面反射镜、精指向机构快速反射镜及光学中继元件、图像传感器等元件及其光路部分构成,而发射光路一般由信标光源、预指向机构快速反射镜、光路中继元件、精指向机构快速反射镜、望远镜和粗指向机构平面反射镜等元件及其光路部分构成,其中信标光源位置与激光终端具体设计相关。激光终端控制电路控制各指向机构转动,使得入射光沿接收光路传输并在图像传感器上成像,而出射光则沿发射光路传输并指向特定位置。
激光终端之间建立激光链路时,采用的捕获模式有凝视/凝视、扫描/凝视、扫描/扫描等模式,其中以扫描/凝视模式最为常见。参考欧洲航天局(ESA)半导体激光星间链路实验(SILEX)项目中欧洲通信卫星阿蒂米斯(ARTEMIS)与法国近地轨道对地观测卫星斯波特-4(SPOT-4)激光星间链路的建立过程[6],激光终端之间采用扫描/凝视模式建立链路的典型捕获时序如图2所示。
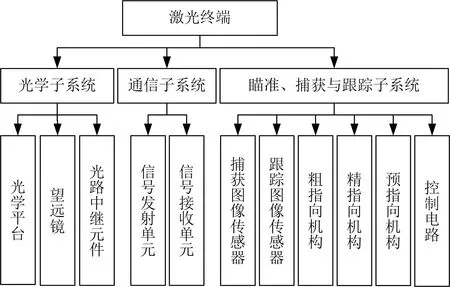
图1 机械式激光终端组成Fig.1 Configuration of mechanical laser communications terminal
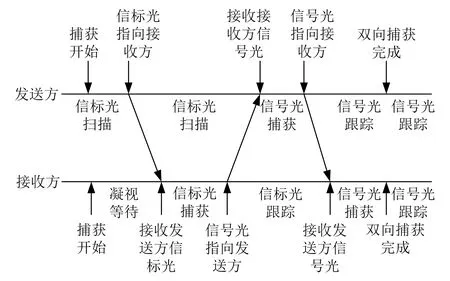
图2 基于凝视/扫描模式的激光终端捕获时序Fig.2 Acquisition timeline for laser terminals based on stare/scan mode
2 激光终端高精度初始指向
激光终端初始指向是指激光终端根据双方所处平台的轨道和姿态信息,驱动自身指向机构转动,使得自身视轴能够指向对方位置[6,8]。激光终端指向误差则是指激光终端自身的视轴指向向量(真实指向)与视线向量(期望指向)之间的误差。激光终端的高精度初始指向是实现激光星间链路快速捕获的前提。实现高精度初始指向的主要手段之一是在对激光终端指向误差的影响因素进行分析的基础上,建立激光终端指向误差模型,通过在轨标定估计模型参数,进而修正激光终端指向机构转动角度,提高激光终端的初始指向精度。
2.1 指向误差分析与建模
激光终端初始指向误差一般由激光终端所在卫星平台的姿态与轨道误差、终端与平台间的安装与振动误差、终端自身指向误差等部分组成。其中,与星敏感器[10-11]、对地观测相机[12-13]等被动成像系统不同,激光终端自身指向误差的影响因素除包含终端轴系误差、内部元件安装及力与热形变误差、传感器测量误差以外,还包括终端控制系统误差、终端指向机构执行误差、终端收发光轴一致性误差等多种因素。因此,需要研究激光终端的物理运行机理或进行系统辨识,明确激光终端的指向误差与各误差因素之间的关系,从而建立适合激光终端的指向误差模型。
与地面望远镜[14]、光电跟踪系统[15]等类似,激光终端指向误差建模方法一般包括分项修正法和球谐函数法两类。基于分项修正法的建模过程包括:
(1)依据终端物理机制,将激光终端表述为一个包括平台、基座、方位与俯仰轴系的多体系统,建立各体及相应光学元件的局部坐标系。
(2)利用射线追踪法和坐标变换关系,建立终端输入输出光向量之间的关系,有
(1)

(3)在此基础上,将系统中各因素对指向误差的影响,表示为各局部坐标系之间额外的误差变换矩阵,得到激光终端最终指向误差与终端转动角度之间的关系,建立指向误差模型。将各误差因素的变换矩阵代入式(1),有
(2)

基于球谐函数法的建模过程则是依据历史数据,利用包含若干阶次球谐函数的多项式对球面上的任意指向误差函数进行拟合。与球谐函数法相比,利用分项修正法建立的模型中各参数具有明确的物理意义,模型的稳定性较好,因而该方法在激光终端指向误差建模中较为常用。
2009年,美国Aerospace公司Fields等人针对德国X频段陆地合成孔径雷达卫星(TerraSAR-X)与美国近场红外实验卫星(NFIRE)之间开展的激光通信试验中,NFIRE上搭载的激光终端建立了该终端的指向误差模型[16]。对该模型参数估计后修正终端指向误差,使得该终端的不确定区域由2000 μrad下降到200 μrad左右。上述模型考虑了终端轴系误差、内部光学元件安装误差、图像传感器测量误差等收发共用光路中的部分误差因素对指向误差的影响,但未涉及激光光源、预指向机构安装误差等预指向光路部分误差及收发光路一致性误差的影响。国内部分学者也针对激光终端指向误差建模进行了研究。2012-2017年,哈尔滨工业大学的于思源等人对潜望式激光终端中影响指向误差的机械轴系误差、终端发射光路元件安装误差及粗指向机构定位角误差等误差因素进行了分析,建立了包含上述误差因素的终端指向误差模型[17-20],并应用于星地激光链路的终端指向误差修正上[19-20],使得终端出射光束瞄准角度由8000 μrad缩小到800 μrad以内,星地链路平均捕获时间由40 s减小到5 s以内。另外,长春理工大学的赵馨等人也针对空间激光链路建立了包含外部安装误差的指向误差模型[21]。
综上,基于分项修正法建立的参数模型是描述激光终端指向误差的主要模型,建模时主要考虑的误差因素包括终端轴系误差、内部光学元件安装误差、图像传感器测量误差等收发共用光路中的部分误差因素,但存在未考虑发射光路的自有误差,这导致模型考虑的误差因素还不够全面,且误差项对非线性误差因素影响的描述不够准确,使得最终修正后初始指向的精度提升有限。因此,需建立误差因素更加全面,对非线性误差因素影响描述更为准确的终端指向误差模型。应考虑在原有指向误差模型的基础上进一步考虑收发光路一致性误差、发射光路误差等误差因素的影响,增加相应的误差项;同时引入半参数模型[15]、误差相似度理论[22]描述非线性误差、未参数化建模误差等误差因素的影响。
2.2 指向误差在轨标定
激光终端指向误差在轨标定是指通过一定的实验手段获取激光终端指向误差在轨观测数据,利用参数估计方法获取指向误差模型各参数的有效值。由于激光终端在发射段及在轨运行段所经历的环境,导致指向误差模型各项参数偏离地面标定初始值,为了获取各项参数的变化,需要在地面标定的基础上利用在轨观测数据对各项参数进行再标定[23]。
在轨标定时观测方程的一般形式有
Y=F(Θ)+E
(3)
式中:Y为在轨观测数据,E为观测噪声。该观测方程的线性化形式为
Y=AΘ+E
(4)
式中:A为指向误差模型线性化后的观测矩阵。
根据在轨标定时参考信标光源的不同,在轨观测数据的获取方法主要有对地观测法[6,19]、恒星观测法[6-7,20]、链路观测法[16]及终端自检法[24]等。不同在轨观测数据获取方法的特点见表1。
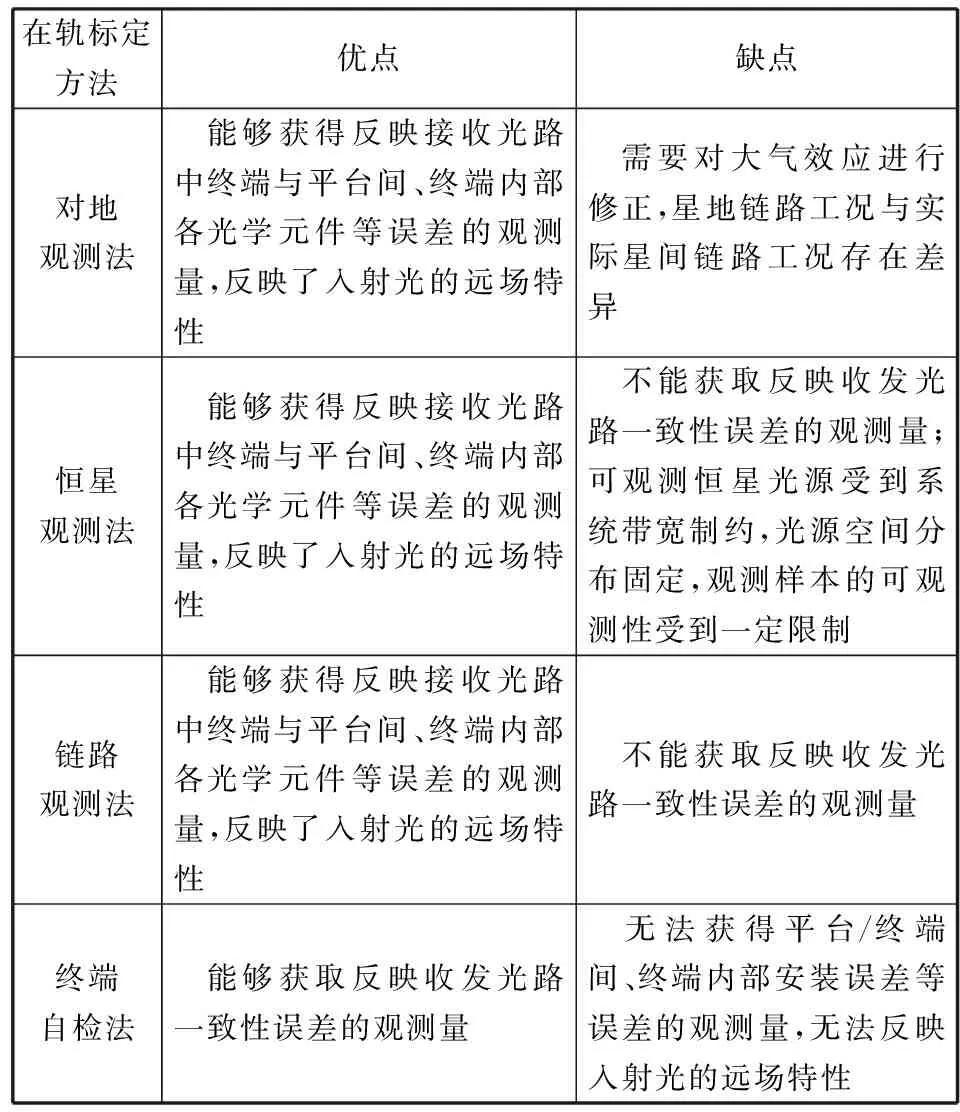
表1 不同在轨观测数据获取方法的特点比较
标定过程中,在轨观测数据反映的指向误差的可观测性影响了参数估计结果的准确性。为了提高指向误差的可观测性,一般需要设计合理的误差激励轨迹。通过优化设计单一激励轨迹以同时激励多项误差或设计多条激励轨迹,每条轨迹只激励指向误差因素集合的部分子集[25]。一般采用航天器载体机动[23,26-27]的方式实现激励轨迹,但该方式需要改变载体姿态,占用其正常工作时间,实际工程上较少采用,如美德合作的地球重力场反演和气候实验卫星(GRACE)在轨运行期间,仅进行了一次以K频段测距系统(KBR)标定为目的的航天器载体机动过程[28]。
获取在轨观测数据后,需要利用一定的参数估计方法对激光终端指向误差模型参数进行估计。目前,对于非时变或变化缓慢的参数,其参数估计方法主要是最小二乘(类)法及其改进算法,而时变参数的估计方法主要是利用卡尔曼滤波算法及其扩展算法,如扩展卡尔曼滤波(EKF)和无迹滤波(UF)等。上述参数估计方法在传感器标定[29-32]中得到广泛应用。
可以看出,目前存在多种激光终端在轨观测数据获取方式,但没有一种方式能够获取全面反映各项指向误差的在轨观测数据;一般通过载体机动实现指向误差的误差激励以改善可观测性;激光链路终端指向误差模型中不同误差参数的变化规律不尽相同,每种参数估计方法也各有其特点。因此,需要结合不同数据获取方式的特点提出一种能够全面反映各项指向误差且与实际工况接近的在轨观测数据的获取方法,充分利用终端自身指向机构的转动来实现无需载体机动的误差激励。另外,应当根据不同误差参数的变化规律和数据处理的实时性需求,选取适宜的批处理或实时参数估计方法。
3 激光链路快速扫描捕获
激光星间链路的扫描捕获是指链路终端完成初始指向后,采取一定的扫描捕获算法,在捕获不确定区域内搜索对方终端,直至对方终端进入本方捕获视场,并被本方终端有效识别。捕获时间长短是衡量扫描捕获优劣的重要指标之一。激光终端快速扫描捕获的研究工作包括扫描捕获过程的参数优化,以及链路中断恢复过程的重捕获等。
3.1 扫描捕获参数优化
激光星间链路快速扫描捕获的参数优化就是针对特定的捕获不确定区域,在优选捕获模式、扫描方式、波束形状特性、信号响应方式的基础上,优化波束角、扫描范围、扫描间距、扫描点滞留时间、重叠系数及扫描场次等参数,以实现给定捕获概率要求下捕获时间最短的目标。
1983年,美国麻省理工大学林肯实验室的Hove等人提出多探测器条件下的并行照射和串行照射两种捕获模式,但未分析扫描方式与参数设置[33]。2000年,以色列Ben-Gurion大学的Scheinfeild等人提出了应用于卫星激光通信的4种捕获模式[34],即:凝视/凝视模式、凝视/扫描模式、扫描/凝视模式及扫描/扫描模式,并在文献[35]中进一步比较分析了螺旋式扫描、光栅扫描、李萨如图形扫描及玫瑰形扫描等扫描方式的特点,但未优化不同扫描方式下的各项扫描参数。2002-2005年,哈尔滨工业大学于思源等建立了星间激光通信中单场捕获的理论模型[36],分析了凝视/扫描模式、圆形高斯光束、螺旋式扫描方式下扫描范围、扫描间距等扫描参数设置对捕获时间的影响,并针对终端指向不确定区域为非对称区域的情况优选了扫描方式[37]。2009年,哈尔滨工业大学陈兴林等提出有效覆盖因子概念以表征单个光束投影的覆盖率,并优化了扫描间距、重叠系数等参数[38]。2011-2012年,哈尔滨工业大学李鑫针对不同终端信号响应方式进一步优化了扫描捕获参数[39],并针对无信标多场捕获扫描问题优化了扫描范围与扫描场次等参数,实现了平均总捕获时间最短的目标[40]。
需要指出的是,文献[36-40]的优化工作均是在指向误差服从均值为零的高斯分布的假设下开展的,尚未对指向误差服从其他分布的工况优化。而事实上,链路终端中指向的系统误差不可避免,零均值只是一种理想状况。因此,为了使优化更加贴近实际情况,需要针对指向误差服从非零均值分布的情况开展优化工作,优化相应的扫描捕获参数。
3.2 中断恢复重捕获
激光链路中断是指激光终端在经历扰动后捕获不确定区域逐渐扩大,最终导致对方终端超出本方光束覆盖范围(或捕获视场)而被动中断。此时,需要通过一定的捕获方法使得本方恢复与对方终端链路。初始捕获过程的所用方法没有充分利用中断恢复过程的已知信息,难以满足更加苛刻的捕获时间要求,需要改进捕获方式或算法,以缩短捕获时间。目前,激光星间链路中断恢复重捕获方法的研究主要集中在两个方面:一是重捕获不确定区域估计算法的改进,二是重捕获扫描捕获参数的优化。
重捕获不确定区域的估计算法,目前主要有滤波估计算法和有限记忆改进型滤波估计算法。2003年,美国喷气推进试验室(JPL)的Lee等针对星地激光链路捕获不稳定的问题,提出了利用惯性传感器数据辅助的滤波估计算法[41],能够在信标光中断时间小于3 s的工况维持链路通信。但该算法需要额外的辅助数据,且难以适应更长时间的中断过程。2015年,中国科学院白帅提出了链路短时中断快速恢复的有限记忆改进型滤波算法[42],能够在5 s的无光期后实现1 s的重捕获。但该算法在链路中断时间较长的情况下效果较差。
在重捕获扫描捕获参数优化方面,有关学者研究了螺旋扫描方式与“反G形”扫描方式的特点。螺旋扫描方式从链路中断中心点处扫描,重捕获概率高,但重叠系数较大,耗费时间较长。2014年,德国应用空间技术与微重力中心的Ales等提出了“反G形”的扫描方式,指出“反G形”扫描方式重叠系数小,适用于重捕获扫描不确定区域与波束角相近的工况,但在重捕获扫描不确定区域较大时捕获时间较长[43]。
因此,需要结合重捕获可利用信息的特点,研究开发有效的、适用于长时间链路中断恢复的重捕获算法,优化重捕获过程的扫描捕获参数。
4 导航星座激光链路研究建议
导航星座及其建立的星间链路网络具有以下特点:
(1)导航卫星具备高精度星历;
(2)与目前试验的“点对点”链路不同,导航星座建立链路时,单一卫星与多颗卫星之间建立“一点对多点”链路,形成一定的拓扑结构,构成激光链路网络;
(3)星座具有自主导航等特殊工作模式,该模式下,星座依靠存储星历信息建立与维持激光链路,依靠链路测距与时间比对实现星座自主定轨与时间同步。
针对导航星座激光链路的上述特点,考虑从以下几个方面开展激光链路快速捕获技术研究:
(1)充分利用导航卫星的高精度星历,减小由卫星轨道误差引起的激光终端指向误差,优化初始指向不确定区域;
(2)针对“一点对多点”链路终端的指向误差模型;目前,已有多种针对“一点对多点”链路终端开展设计的激光终端(如一对多机械式终端[44-45]、光学相控阵式终端[46-47])出现,这些终端的结构与工作原理与当前的机械式终端存在较大差异,需要建立针对性指向误差模型;
(3)适应“一点对多点”链路的标定方法:利用多条激光链路共用同一卫星平台的特点,分析不同链路终端指向之间的相关性,同时借鉴多场相机组标定[48]思想,改进现有的激光终端标定方法;
(4)适应多个终端的标定体制:在原有单星单一终端在轨标定的基础上,开展基准星标定、整网标定等体制的研究,结合传感器“多跳标定”[49]的思路,实现多个激光终端的快速自主标定;
(5)导航星座自主导航期间激光链路捕获技术:自主导航期间可利用信息降级,可利用标定源减少,需要分析可利用信息等级下降后对激光终端指向误差的影响分析,针对性优化扫描捕获参数。
5 结束语
本文通过对国内外激光星间链路快速捕获技术的综述,提出了导航星座激光链路研究建议。未来导航星座激光星间链路对快速捕获技术提出了苛刻要求。一方面有必要在现有链路快速捕获技术的基础上进一步考虑改善激光终端指向误差模型,完善指向误差在轨标定方法,优化激光链路扫描捕获参数,并开展激光链路重捕获研究。另一方面,结合导航星座卫星具备精密星历、多链路组网、具备自主导航模式等特点,针对“一点对多点”链路的终端指向误差建模、在轨标定方法与体制及自主导航期间的链路快速捕获技术开展研究。
References)
[1] 姜会林,安岩,张雅琳,等.空间激光通信现状、发展趋势及关键技术分析[J].飞行器测控学报,2015,34(3):207-217
Jiang Huilin,An Yan,Zhang Yalin,et al.Analysis of the status quo,development trend and key technologies of space laser communication[J].Journal of Spacecraft TT&C Technology,2015,34(3):207-217 (in Chinese)
[2] Hemmati H.Interplanetary laser communications and precision ranging[J].Laser & Photonics Reviews,2011,5(5):697-710
[3] 陈忠贵,帅平,曲广吉.现代卫星导航系统技术特点与发展趋势分析[J].中国科学(E辑:技术科学),2009,39(4):686-695
Chen Zhonggui,Shuai Ping,Qu Guangji.The technology characteristic and development trend of modern navigation satellite system[J].Science in China(Series E:Technological Sciences),2009,39(4):686-695 (in Chinese)
[4] 林益明,何善宝,郑晋军,等.全球导航星座星间链路技术发展建议[J].航天器工程,2010,19(6):1-7
Lin Yiming,He Shanbao,Zheng Jinjun,et al.Development recommendation of inter-satellite links in GNSS[J].Spacecraft Engineering,2010,19(6):1-7 (in Chinese)
[5] 徐勇,常青,于志坚.GNSS星间链路测量与通信新方法研究[J].中国科学:技术科学,2012,42(2):230-240
Xu Yong,Chang Qing,Yu Zhijian.Research on new measurement and communication techniques of GNSS inter-satellite links[J].Scientia Sinica(Technologica),2012,42(2):230-240 (in Chinese)
[6] Nielsen T T,Oppenhaeuser G.In orbit test result of an operational optical intersatellite link between ARTEMIS and SPOT4,SILEX[C]//Proceeding of SPIE Free-Space Laser Communication Technologies ⅪⅤ.Bel ̄lingham:SPIE,2002:1-15
[7] Benzi E,Shurmer I,Policella N,et al.Optical inter-satellite communication: the Alphasat and Sentiinel 1A in-orbit experience[C]//AIAA 14th International Conference on Space Operations.Washington D.C.:AIAA,2016
[8] 刘立人.卫星激光通信Ⅰ:链路和终端技术[J].中国激光,2007,34(1):3-20
Liu Liren.Laser communication in spaceⅠ:Optical link and terminal technology[J].Chinese Journal of Lasers,2007,34(1):3-20 (in Chinese)
[9] 姜会林,佟首峰.空间激光通信技术与系统[M].北京:国防工业出版社,2010
Jiang Huilin,Tong Shoufeng.The technologies and systems of space laser communication[M].Beijing:Nati ̄onal Defense Industry Press,2010 (in Chinese)
[10] SunT,Xing F,You Z.Optical system error analysis and calibration method of high-accuracy star trackers[J].Sensors,2013,13(4):4598-4623
[11] Li J,Xiong K,Wei X G,et al.A star tracker on-orbit calibration method based on vector pattern match[J].Review of Scientific Instruments,2017,88(4):1-12
[12] Wang M,Cheng Y F,Chang X L,et al.On-orbit geometric calibration and geometric quality assessment for the high-resolution geostationary optical satellite GaoFen4[J].ISPRS Journal of Photogrammetry and Remote Sensing,2017,125:63-77
[13] Poli D,Toutin T.Review of developments in geometric modeling for high resolution satellite pushbroom sensors[J].Photogrammetric Record,2012,27(137),58-73
[14] 赵彦.大射电望远镜指向误差建模分析与设计研究[D].西安:西安电子科技大学,2008
Zhao Yan.Research on modeling,analysis and design of pointing errors for large radio telescope[D].Xi’an:Xidian University,2008 (in Chinese)
[15] 张智永,周晓尧,范大鹏.光电探测系统指向误差分析、建模与修正[J].航空学报,2011,32(11):2042-2054
Zhang Zhiyong,Zhou Xiaoyao,Fan Dapeng.Analysis, modeling and correction of pointing errors for electro-optical detection systems[J].Acta Aeronautics et Astronautics Sinica,2011,32(11):2042-2054 (in Chinese)
[16] Fields R,Lunde C,Wong R,et al.NFIRE-to-TerraSAR-X laser communication results:satellite pointing,disturbances,and other attributes consistent with successful performance[C]//SPIE Sensors and Systems for Space Applications Ⅲ.Bellingham:SPIE,2009
[17] 于思源.卫星光通信瞄准捕获跟踪技术[M].北京:科学出版社,2016
Yu Siyuan.Pointing, acquisition and tracking tech ̄niques in satellite optical communication[M].Beijing:Science Press,2016 (in Chinese)
[18] 吴世臣.潜望式光终端瞄准误差建模及补偿方法研究[D].哈尔滨:哈尔滨工业大学,2012
Wu Shichen.Pointing error modeling and correction method for periscope-type optical communication terminals[D].Harbin:Harbin Institute of Technology,2012 (in Chinese)
[19] 武凤,于思源,马仲甜,等.星地激光通信链路瞄准角度偏差修正及在轨验证[J].中国激光,2014,6(1):154-159
Wu Feng,Yu Siyuan,Ma Zhongtian,et al.Correction of pointing angle deviation and in-orbit validation in satellite-ground laser communication links[J].Chinese Journal of Lasers,2014,6(1):154-159 (in Chinese)
[20] Yu S Y,Wu F,Tan L Y,et al.Static position errors correction on the satellite optical communication terminal[J].Optical Engineering,2017,56(2):1-6
[21] 赵馨,刘云清,佟首峰.动态空间激光通信系统视轴初始指向建模及验证[J].中国激光,2014,41(5):151-156
Zhao Xin,Liu Yunqing,Tong Shoufeng.Line-of-sight initial alignment model and test in dynamic space laser communication[J].Chinese Journal of Lasers,2014,41(5):151-156 (in Chinese)
[22] 何晓煦,田威,曾远帆,等.面向飞机装配的机器人定位误差和残差补偿[J].航空学报,2017,38(4):292-302
He Xiaoxu,Tian Wei,Zeng Yuanfan,et al.Robot positioning error and residual error compensation method for aircraft assembly[J].Acta Aeronautics et Astronautics Sinica,2017,38(4):292-302 (in Chinese)
[23] Pittelkau M E.Autonomous on-board calibration of attitude sensors and gyros[C]//Proceeding of the 20thInternational Symposium on Space Flight Dynamics.Greenbelt:NASA/GSFC,2007:1-10
[24] Jamie W B,Stephen D C,Allen D P.Design of an inertially stabilized telescope for the LLCD[C]//SPIE Free-Space Laser Communication Technologies ⅩⅩⅢ.Bellingham:SPIE,2011
[25] Wu J,Wang J S,You Z.An overview of dynamic parameter identification of robots[J].Robotics and Computer-Integrated Manufacturing,2010,26(5):414-419
[26] Sekhavat P,Karpenko M,Ross I M.UKF-based spacecraft parameter estimation using optimal excitation[C]//AIAA Guidance,Navigation and Control Conference.Washington D.C.:AIAA,2009
[27] Drue C,Heinemann G.A review and practical guide to in-flight calibration for aircraft turbulence sensors[J].Journal of Atmospheric and Oceanic Technology,2013,30(12):2820-2837
[28] Bandikova T,Flury J,Ko U D.Characteristics and accuracies of the GRACE inter-satellite pointing[J].Advances in Space Research,2012,50(1):123-135
[29] Pittelkau M E.Kalman filtering for spacecraft system alignment calibration[J].Journal of Guidance, Control and Dynamics,2001,24(6):1187-1195
[30] Lai K L,Crassidis J L,Harman R R.In-space spacecraft alignment calibration using the unscented filter[C]//AIAA Guidance,Navigation,and Control Conference.Washington D.C.:AIAA,2003
[31] Leeghm H,Choi Y A,Jaroux B.Uncorrelated unsc ̄ented filtering for spacecraft attitude determination[J].Acta Astronautica,2010,67(1):135-144
[32] Springmann J C,Cutler J W.On-orbit calibration of photodiodes for attitude determination[J]. Journal of Guidance Control & Dynamics,2014,37(6):1808-1823
[33] Hove P V,Chan V W S.Spatial acquisition algorithms and systems for optical ISL[J].IEEE Transactions on Aerospace and Electronic Systems,1983,22(1):19-22
[34] ScheinfeildM,Kopeika N S.Acquisition system for microsatellites laser communication in space[C]// SPIE Free-Space Laser Communication Technologies ⅩⅡ.Bellingham:SPIE,2000
[35] Scheinfeild M,Kopeika N S.Acquisition time calculation and influence of vibrations for micro-satellite laser communication in space[C]// SPIE Acquisition,Tracking and Pointing ⅩⅤ.Bellingham:SPIE,2001:195-205
[36] Yu S Y,Ma J,Gao H D,et al.Selection of acquisition scan methods in intersatellite optical communications[J].Chinese Journal of Lasers, 2002,11(5):364-368
[37] 于思源,马晶,谭立英,等.提高卫星光通信扫描捕获概率的方法研究[J].光电子·激光,2005,16(1):57-62
Yu Siyuan,Ma Jing,Tan Liying,et al.Methods of improving acquisition probability of scanning in intersatellite optical communications[J].Journal of Optoelectroncis Lasers,2005,16(1):57-62 (in Chinese)
[38] 陈兴林,郑燕红,贾琪,等.星间光通信扫描捕获过程分析[J]. 哈尔滨工业大学学报,2009,41(11):34-38
Chen Xinglin,Zheng Yanhong,Jia Qi,et al.Scanning acquisition process of optical communication [J].Journal of Harbin Institute Technology,2009,41(11):34-38 (in Chinese)
[39] Li X,Yu S Y,Ma J,et al.Analytical expression and optimization of spatial acquisition for intersatellite optical communications[J].Optics Express,2011,19(3):2381-2390
[40] 李鑫.星间激光通信中链路性能及通信性能优化研究[D].哈尔滨:哈尔滨工业大学,2013
Li Xin. Optimization research on link and communication performance for intersatellite laser commu ̄nications[D].Harbin :Harbin Institute of Technology,2013 (in Chinese)
[41] Lee S,Ortiz G G.Atmosphere tolerant acquisition, tracking and pointing subsystem[C]// SPIE Free-Space Laser Communication Technologies ⅩⅤ.Bellingham:SPIE,2003:36-44
[42] 白帅.空间二维转台的高稳定捕获跟踪技术研究[D].上海:中国科学院研究生院,2015
Bai Shuai. Research on highly stable acquisition and tracking technologies of space two-axis optoelectronic gimbals[D].Shanghai:University of Chinese Academy of Science,2015 (in Chinese)
[43] Ales F,Gath P F,Johann U,et al.Modeling and simulation of a laser ranging interferometer acquisition and guidance algorithm[J].Journal of Spacecraft and Rockets,2014,51(1):226-238
[44] 郑阳,付跃刚,胡源,等.基于空间激光通信组网四反射镜动态对准研究[J].中国激光,2014,41(1):97-103
Zheng Yang,Fu Yuegang,Hu Yuan,et al.Research on four-mirror dynamic alignment based on space laser communication link networks[J].Chinese Journal of Lasers,2014,41(1):97-103 (in Chinese)
[45] 张雅琳,安岩,姜会林,等.空间激光通信一点对多点光学原理与方法的比较[J].兵工学报,2016,37(1):165-171
Zhang Yalin,An Yan,Jiang Huilin,et al.A comparative research on optical principles and methods of one-point-to-multi-point space laser communication[J].Acta Armamentarh,2016,37(1):165-171 (in Chinese)
[46] McManamon P F.An overview of optical phased array technology and status[C]//Proceeding of SPIE Liquid Crystals Optics and Applications.Bellingham:SPIE,2005
[47] William J M,Steven A L.Optical space-time division multiple access[J].Journal of Lightwave Technology,2012,30(11):1771-1785
[48] 王刚,尚洋,关棒磊,等.无重叠视场多相机组安装关系的灵活标定[J].中国激光,2017,44(6):1-7
Wang Gang,Shang Yang,Guan Banglei,et al.Flexible calibration of setting relation of a multi-camera rig for non-overlapping views[J].Chinese Journal of Lasers,2017,44(6):1-7 (in Chinese)
[49] Fu K B,Rou W,Dong W.Multihop calibration for mobile sensing:K-hop calibratability and reference sensor deployment[C]//IEEE Conference on Computer Communications.New York:IEEE,2017
猜你喜欢
火力与指挥控制(2022年8期)2022-09-16
网络安全与数据管理(2022年6期)2022-07-13
移动通信(2021年5期)2021-10-25
汽车电器(2021年8期)2021-08-24
汽车电器(2021年7期)2021-08-04
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
汽车维修与保养(2020年11期)2020-06-09
福建基础教育研究(2019年6期)2019-05-28
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18