
公务船艇通导设备信息服务集成研究与应用
2018-02-27 03:06朱麟
计算机应用与软件 2018年1期
朱 麟
(公安海警学院训练部 浙江 宁波 315801)
0 引 言
海上通导设备服务于船舶运输、航海定位、作战信息指挥以及监控调度,其蕴含着大量的信息数据,而这些数据对于公务船艇海上执法信息化建设有着重要的作用。船艇通导设备信息服务的集成与共享是一项艰巨而复杂的任务[1],由于缺乏科学的信息技术标准以及技术条件的限制,形成了信息孤立、标准各异的局面。近几年,我国海上执法力量获得了快速发展,各海上执法单位相继建立了一批先进的自动化信息系统,为提升海上船艇信息化执法能力等方面发挥了重要作用。但是在新旧设备信息高度融合、中间件集成、系统接口设计、集成技术性能优势,以及网络空间互联互通等方面仍制约着总体通导设备信息共享框架的发展。因此有必要研发一个公务船艇通导设备服务集成系统,对于解决海上执勤执法、观察取证、监控调度、海上救援等信息共享有着重大意义。
船艇通导设备服务包括通信服务、导航服务、观察取证服务、显示服务、网络服务、数字音频图像集成服务以及相关硬件服务,根据一定的设计要求和安全性要求将设备存储的历史和实时信息整合为一体化的应用平台,从而减少航行操作错误,提高出航安全。文献[2]通过基于云服务的电子航海为海上安全提供线路支持和通信服务,这种服务的集成减少了设备系统带来的信息冗余问题,实现了信息集成与共享,为指挥决策提供了一定的帮助。文献[3]采用不同度量的方法集成实时全球航海卫星系统服务的数据信息,从而证明该系统在大型船舶上发挥的航海能力。同时,文献[4]中,Daniel等采用电子海图服务集成所有设备信息以此来改进加拿大海上通导设备系统。国家海洋信息中心[5]针对我国海洋建设过程中产生的“数据孤岛”问题,对数字海洋主中心节点和各子节点单位的海洋空间数据进行统一规划,制定了一套数据处理、组织存储、服务制作、共享发布与下载使用等标准流程的服务方案。然而,在实际应用中,由于设备的多样性、环境的复杂性、数据采集的不确定性以及实时服务的延时性,单靠电子海图的服务能力还远远达不到所有设备服务集成的效果,同时还会降低服务效率,给出错误的决策。因此,本文从通导设备服务的角度,研究了信息服务集成在公务船艇通导设备的应用,并在实践中进行推广和运行。
1 系统总体设计
1.1 系统多态数据采集
系统信息服务数据采集的目标是以电子海图显示与信息系统为客户端,将导航数据和机舱工况数据等多态数据进行采集。其中,导航数据来自船艇自动导航系统AIS(Automatic Identification System)、全球定位系统GPS(Global Position System)、雷达系统、电罗经、风速风向仪等相关信息。形成的多态数据为船上人员实时提供船艇状态信息并实现预警、辅助目标跟踪、船艇航行状态记录和查询回放等服务。机舱工况数据包括主机系统数据、燃油系统数据、冷却水系统数据等。系统将所有采集的数据保存在船上或经通信信道发送给指挥中心的船艇数据库中,并与电子海图系统关联,用户可在船艇本地或者岸上指挥中心远程查看机舱历史和实时数据。系统还具有即时通信功能,可实现船艇与岸上用户间的文本短信、即时文本通信、文件传输、数据查询等功能。通过数据采集程序、电子海图引擎和数据通信服务器,获取AIS、GPS、雷达等数据,将这些数据转换为计算机可理解的知识,从而实现接口转换和中间件服务的信息流程。
1.2 系统软件架构
系统软件采用模块化,分布式的体系结构。依据处理业务类型的不同,分模块部署在相应的物理平台上,与各系统平台对应的数据也存储在相应的系统平台上,各部分软件分别独立工作。通过局域网实现系统间的信息交互,分为应用层、业务层、协议层、链路控制层和物理层。应用层分布于船用系统平台和岸基指挥中心平台,通过业务处理层将各平台的硬件接口与现有通信导航设备或系统连接,标准协议和链路控制层以船艇局域网为承载通道实现各系统的互联互通,完成各业务系统和设备的通信和控制。软件系统分层结构模型如图1所示。
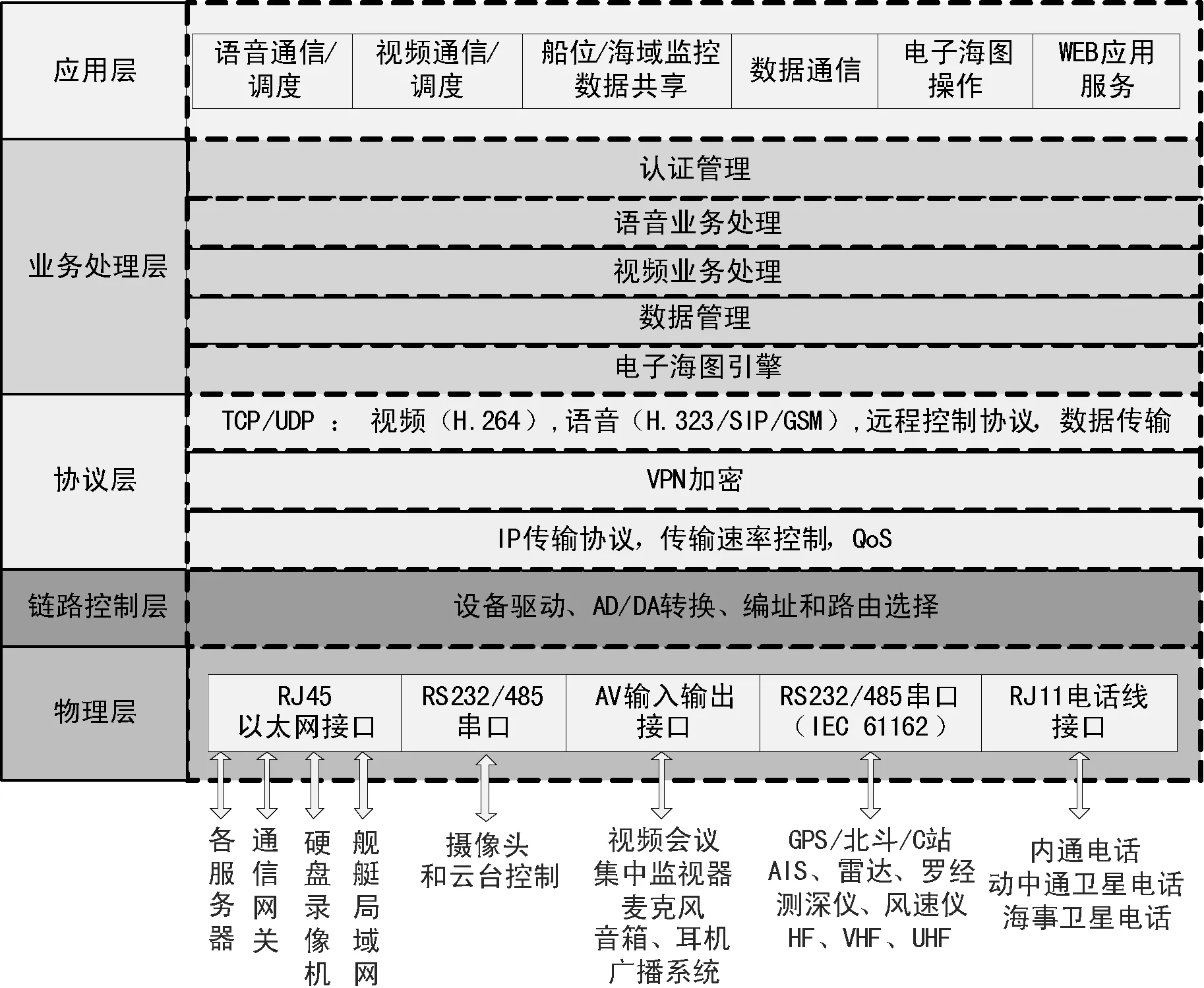
图1 软件系统分层结构模型
本系统采用综合集成的方法将各个应用平台服务集成为公务船艇系统、岸基指挥中心系统和信息传输系统三大部分。通过该三部分的集成,构建语音、视频、数据等多种业务的一体化信息平台,主要包括:(1) 在岸基指挥所按指挥级别分别设置通导控制管理中心,通过地面专用网与各指挥中心之间实现信息共享。(2) 船艇上配置通导控制管理设备,对平台内部通导设备进行统一管理,实现信息共享。(3) 在沿海附近,船艇可通过超短波系统实现对岸互通;远离岸边时,船艇可通过卫通、短波实现对岸通信。(4) 船艇编队之间可通过短波、超短波构建编队内话音、数据及视频信息互联互通,实现数据信息共享。
2 关键技术
2.1 服务集成建模技术
系统首先采用元模型描述信息服务过程中元素、属性以及元素关系,通过控制结构和数据结构描述服务组合过程,实现服务组合模型的资源交互,定义服务资源要素的组成和约束。一个服务元模型由原子服务、组合服务和关系构成,其中原子服务是不可再分割的服务并可以直接调用,一个原子服务的工作模式为输入参数到执行服务到输出结果。将原子服务的属性集和参数集进行定义,属性集描述了原子服务的标识、名称、服务类型和在知识库中的标识,参数集描述了服务的输入与输出参数。组合服务模型定义了控制流、数据流和服务子模型,从而为空间信息、网络信息和硬件平台进行服务。
元模型设计后,需要从空间信息服务链的服务资源、数据流、控制流三个方面描述服务链元素向BPEL[6]业务流程语言(Business Process Execution Language)元素之间的映射与转换。(1) 服务转换:在服务链中,服务分为组合服务和原子服务,采用
2.2 信息服务链技术
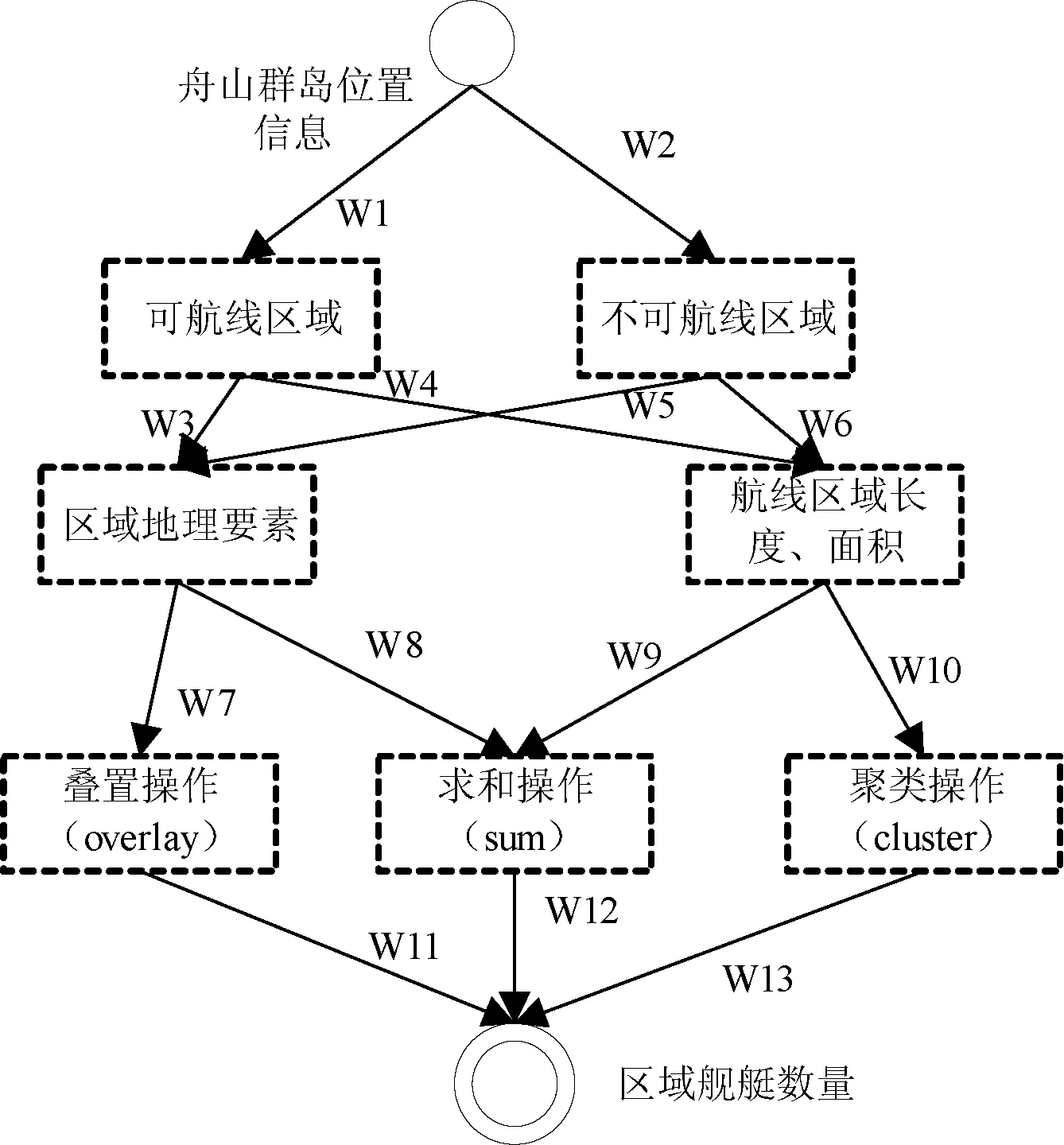
(1) 服务链的规划:服务链的规划是服务链生成的关键,可以对业务逻辑进行建模和预定义。设一条空间信息服务链为Si={D,E,F},i 对于WFS,如果要计算返回要素类型为航海通行区域(Navigation_area)或船艇航迹(Ship_route),则采用输入要素与查询语句操作:getFeature(featureType: string, q: query):featureCollection,其语句如下所示: • getFeature: featureCollection(y),(∀ x∈y→Navigation_area (x)); 茄子生长成熟后采收,采收要注意采收的时间,一般在开花后的25天,也就是茄子萼片与果实相接处白色或淡绿色环状带即将消失时即可采收。采收之后,要及时包装和售卖,保障茄子的质量。 • getFeature: featureCollection(y),(∀ x∈y→Ship_route (x))。 而对于WPS服务,则采用sum( )函数与overlay( )函数操作: • overlay(y1: featureCollection, y2: featureCollection):FeatureCollection; • sum(y: featureCollection, attributeToSum:string):int。 其中:overlay( )函数判断要素集合y1和y2在空间y中的个数;sum( )函数将要素的属性相加。在实际应用中可以分析航海通行区域的叠置状况或获取航迹所经过的位置点。 如图2所示,在一个具体的服务链生成过程中,首先采用getFeature( )函数获取Navigation_area和Ship_route空间要素类型,然后用overlay( )函数操作空间域S和船艇航迹要素集合并返回,对该数据集进行搜索。而sum( )函数实现了使目标转换成具体的Navigation_area和Ship_route要素数据。 图2 局部服务链生成过程片段 图3 空间信息服务链有向图 (3) 服务链的实例化:通过OWL-S[8]语义服务描述与WSDL[9]网络服务描述语言之间的映射实现分布在不同服务器上的服务实例化和绑定。服务链的实例化采用服务质量QoS(Quality of Service) 模型在不同服务实例中进行选择,实例化的实现过程则将选定服务实例的WSDL映射到OWL-S的服务组中。 (4) 服务链的执行:将实例化的可执行服务链进行发布和执行,根据服务组合模型文件中各原子服务的链接关系,将系统匹配得到的原子服务实例相互链接,以ActiveBPEL作为引擎解决通导设备信息中原子服务实例链接的问题。执行方式首先将OWL-S 处理模型中元素映射到 BPEL模型,然后交给Active BPEL引擎执行,服务执行引擎按照实例化的服务链协调、部署、管理和执行具体服务,最后得到服务结果返回用户终端。 服务数据集成采用总线的方法对船艇通导信息的业务流程进行分析管理,以满足数据终端和数据中心的业务需求,服务技术包含了消息队列MQ(Message Queue)、数据转换捕获器CDC(Change Data Capture)、消息流MF(Message Flow),各业务系统将消息放在总线上来实现消息路由和格式转换。 船艇通导信息设备服务数据集成通过数据交换与访问发布WebService服务,主要提供外部应用系统访问全域数据库的途径。全域数据库中的每张数据表都对应一个数据访问服务,且每一个数据访问服务都包含增加、修改、删除、查询、分页查询、获取记录这6种服务方法。该服务方法通过信息集成平台访问控制终端或业务软件自主开发代码调用数据访问服务访问基础数据库数据或对基础数据库数据进行更新。 本文研究开发的服务集成系统搭建于Intel Core 2 Quad 2.4 Hz Windows10,服务器架构于IBM 3650xm,采用Linux Asia 3x版本,集成数据库为IBM DB2。系统以电子海图为显示背景,支持国际标准海图数据IHO S57,支持海军航保部VCF格式数据。系统可接入船载GPS、AIS、雷达、北斗、计程仪、测深仪等设备作为数据传感器,自动采集并结合电子航道图的空间信息进行综合利用,可及时、自动地为操作员提供丰富的助航、避碰及危险报警信息,并动态标绘出船艇上传和岸基AIS基站接收到的目标船位置、航向、航速、目的港等多种静动态信息和目标船艇的历史航迹,如图4所示。 图4 公务船艇通导设备信息服务集成系统应用 系统实时将数据(导航数据和机舱数据)存储到数据库(DB2)中,并可以配置存储频率,方便本船艇其他系统对数据资源的再次利用。可提供基于TCP/IP协议的数据输出接口,将多种数据信息传输至其他设备,还可以通过卫星及其他通信网络将数据传输到指挥中心以实现远程数据共享。系统在浙江、江苏、上海等几个具备条件的沿海地区和公务船艇大队应用,并逐步推广到其他地区。 本文针对公务船艇通导设备信息集成与共享缺乏科学合理的技术标准、技术条件的限制等问题,研发了一个信息服务集成系统。该系统采用服务集成建模、信息服务链技术以及数据集成技术对多态数据进行采集、过滤、集成、共享,并分析系统软件架构和分层结构模型,实现了整个系统的应用和推广。但目前还有很多智能化集成技术的正在试运行和筹建中,系统的集成缺少数据的语义性,下一步将人工智能的方法应用于该系统中,丰富服务集成的自动化和智能化水平。 [1] 黄胜波,朱麟.公务船艇通导设备信息集成方案研究与探索[M].上海:上海交通大学出版社,2016:1-3. [2] Kwang An.E-navigation Services for Non-SOLAS Ships[J].International Journal of e-Navigation and Maritime Economy,2016,4:13-22. [3] Branzanti M,Colosimo G,Mazzoni A.Variometric approach for real-time GNSS navigation:first demonstration of Kin-VADASE capabilities[J].Advances in Space Research,2016,59(11):2750-2763. [4] Breton D,Barry J,Vandehei L.Improving Canada’s Marine Navigation System through e-Navigation[J].International Journal of e-Navigation and Maritime Economy,2016,4(6):23-30. [5] 吕憧憬,蒋冰,曲辉,等.基于Web服务的海洋空间数据共享技术研究与实现[J].计算机应用与软件,2016,33(12):49-51,70. [6] Langer M.Business Process Reengineering[J].Analysis and Design of Information System,2008:268-280. [7] Wikipedia,the free encyclopedia.Directed Acyclic Graph[EB/OL].(2010-03-31).https://en.wikipedia.org/wiki/Directed_acyclic_graph. [8] Web service description language (WSDL)[EB/OL].(2001-01-01).http://www.w3.org/TR/wsdl. [9] OWL Web Ontology Language[EB/OL].(2004-1-10).http://www.w3.org/TR/owl-semantics/.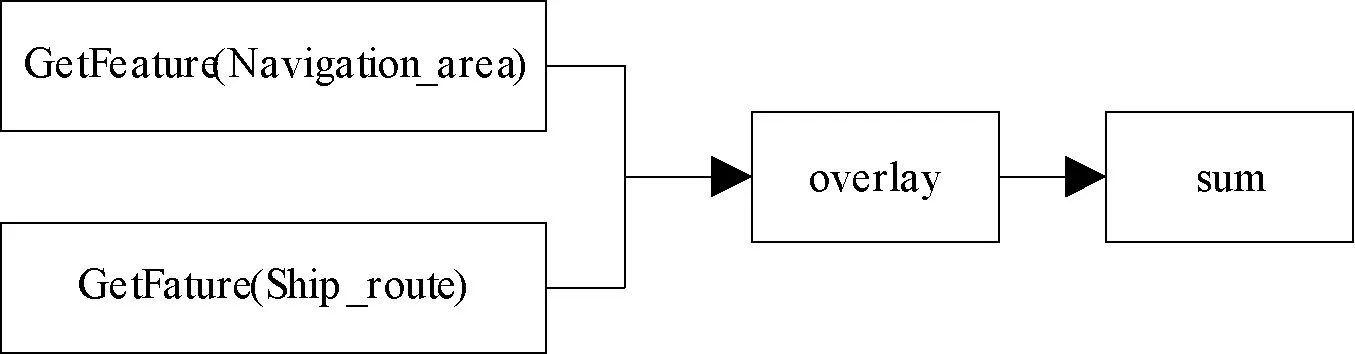
2.3 服务数据集成
3 系统实现及应用
4 结 语
猜你喜欢
无人系统技术(2022年1期)2022-03-24
当代工人(2020年13期)2020-09-27
广东造船(2019年6期)2019-02-12
电子制作(2018年11期)2018-08-04
中华手工(2017年2期)2017-06-06
证券市场周刊(2017年3期)2017-04-01
中外会展(2014年4期)2014-11-27
现代计算机(2009年6期)2009-08-22
金山(2009年7期)2009-08-13
祝您健康(1987年3期)1987-12-30
