基于擂台赛的轮式机器人对抗策略分析
2018-02-22 03:07:06车玉秋郭丹蕊
机器人技术与应用 2018年6期
时 存 车玉秋 郭丹蕊
(郑州电力高等专科学校,郑州, 450000)
0 引言
目前,机器人技术越来越受到大众的青睐,无论是工业机器人代替人类进行繁重劳动,还是服务机器人代替人类完成扫地、安检、巡视等工作[1],人类的双手正随着机器人的大量应用而二次被解放出来。当下,创客教育正逐步将接受机器人教育者向小龄化推进,从小学到大学,机器人开发热成为素质教育最为热门的话题之一。其中,轮式机器人因其结构简单、驱动及控制方式灵活,率先成为机器人研发的宠儿[2]。近几年竞技机器人比赛的普及,也为更多的人投入对抗型移动机器人的研发和制作提供了实践平台。
本文以目前普及较广的对抗型机器人擂台赛为研究背景,采用北京博创尚和科技有限公司推出的创意之星模块化机器人套件包(标准版)搭建的轮式机器人作为研究对象,通过分析机器人结构和程序逻辑,阐述机器人在擂台赛中进攻策略的优化及结构的改进方法。
1 机器人系统分析
本文搭建的轮式机器人如图1 所示,其底盘为不规则六边形,4 个电机带动4 个轮子安装在底盘左右两侧。机器人采用基于ATmega128 单片机的AVR 控制器实现控制,由7.2V 锂聚合物电池组给控制器和电机供电,电压范围6.5V-8.4V,放电电流5A-10A;其车轮采用直流电机驱动,由于机器人结构尺寸不能超出300mm×300mm,电机驱动器安装位置受限,故左侧2 个电机和右侧2 个电机各由1个驱动器驱动,机器人左右转弯依靠两侧的车轮差速来实现;机器人可采用NorthStar 图形开发环境编程,亦可采用C 语言程序代码进行编程。

图1 轮式机器人
2 比赛场地和规则
2.1 比赛场地规格及参赛要求
如图2 所示,中间比赛场地长×宽×高为2400 mm× 2400 mm×60mm,是比赛的擂台区域,距离场地周围700mm 处有高500mm 的方形黑色围栏,围栏内全为比赛用地;擂台对角位置各有1 个长×宽为500 mm×400mm 的斜坡,作为双方机器人的出发区域。
每台参赛机器人重量不得超过4kg,在出发区的投影尺寸不超过300 mm×300mm,但是机器人启动后可自主变形,不再受以上尺寸限制。除控制器和连接螺钉外,机器人不得有其他金属部件,特别是攻击部件的材料必须是全塑料。

图2 机器人擂台赛比赛场地示意
2.2 赛项规则及胜负判定
首先经抽签后分组进行小组排位赛,每组1 对1 进行对抗,共进行3 个回合的较量,每个回合限时2min。
裁判宣布比赛开始后,在不以操作者身体任何部位接触机器人的前提下,10s 内机器人必须自主登台成功,否则以10s 为1 单位给对方加1 分,累计满3 分,对方直接在本局胜出。
双方机器人自主成功登台后即可开始对抗比赛,在对抗中,将对方机器人挤落擂台而本方留在擂台上,本方积3 分,双方僵持不下或同时掉落擂台,各积1 分。
最终各参赛队根据积分数、积净胜场数排名,小组排名前两位进入淘汰赛,直至冠亚军决赛。
3 机器人对抗策略
3.1 登台策略
机器人启动信号为软启动,在上电状态下,利用底部左右两侧红外接近传感器的状态变化,启动上擂台程序,当两侧传感器同时感应到障碍物时,例如,用双手同时遮挡车体两侧,即可启动机器人登上擂台。
机器人首先启动舵机,收起正前方的攻击支架,从斜坡登上擂台,利用延时程序运动至擂台中心位置,停下后立即放下攻击支架,进入漫游巡敌状态。图3 所示为机器人从出发区登上擂台的流程图及部分C 语言程序。
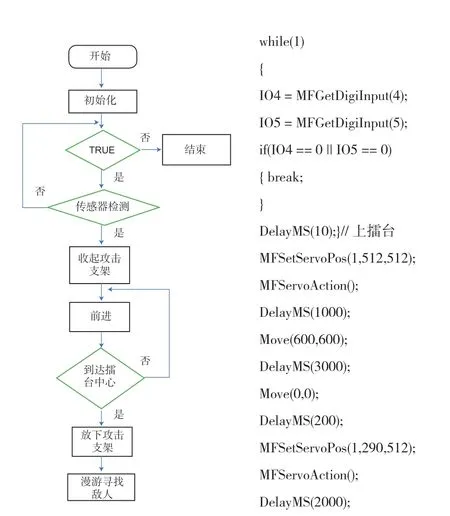
图3 机器人登擂台流程图及部分程序
3.2 漫游策略
机器人登上擂台后,根据是否存在敌人,分两种情况漫游:若检测不到敌方,机器人则通过传感器检测擂台边沿,由擂台中心区域出发,先向车头方向前进,直至到达擂台边沿,再进行后退或者转弯等边沿处理,离开边沿后继续前进至再次检测到边沿,再次进行边沿处理,达到机器人在擂台上进行漫游的目的;若检测到敌方,机器人根据传感器判断敌方位置,进而调整自身位置,然后攻击敌方,直至本方到达擂台边沿,此时敌方已掉下擂台,该回合比赛结束。
3.3 边缘检测
在比赛中,以“敌方掉下擂台而本方仍在擂台上”判定本方获胜,因此机器人的边缘检测是最重要的逻辑单元[3]。无论漫游或攻击敌方,机器人都应该以不从边沿掉落为首要条件。
比赛擂台采用渐变色台布,中心为白色加红色“武”字区域,越到边缘,台布颜色越深。机器人底盘前后左右4 个方向对应安装4 个灰度传感器,利用灰度传感器返回值可较为准确地判断机器人某个部位已到达擂台边缘,再结合用于检测边沿的4 个红外接近传感器,即可判断机器人所处位置是否有掉落的危险,进而进行后退、转弯等边沿处理。其中,4 个灰度传感器连接在控制器的模拟输入口AD4、AD5、AD6、AD7,以攻击支架为正前方,灰度传感器分布情况如表1 所示。

表1 灰度传感器分布情况
擂台中心区域颜色较浅,灰度传感器上LED 灯发出的光线反射强烈,灰度传感器返回值较大;边缘区域颜色较深,光线反射较弱,传感器返回值较小。
为保证准确反映机器人位于边缘的位置和方向,必须严格标定4 个灰度传感器的阈值,如图4 所示,当灰度传感器返回值小于阈值时,即表明机器人已经位于擂台边缘,若边沿红外接近传感器同时检测到边沿,则机器人进行边沿处理。

图4 灰度阈值标定点示意图
标定阈值时,根据擂台尺寸划分区域进行标定,本次比赛擂台规格长、宽各为2400mm,擂台高度50mm。在擂台某一条边按300mm 间隔设置7 个测量点,依次检测AD4-AD7 灰度值,直至测量完4 条边,取所测灰度值的平均值作为该位置灰度传感器的阈值,如图5 所示。
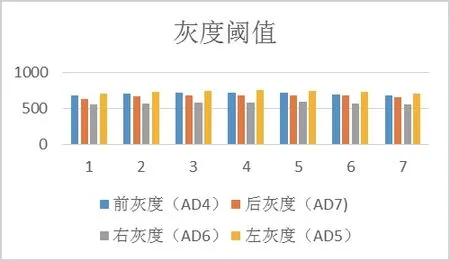
图5 某一侧边7 个标定点灰度阈值标定情况
根据灰度传感器返回值可较容易判断出机器人是否到达擂台边缘,但对于是否到达或超出擂台边沿,还需结合机器人上方安装的4 个红外接近传感器状态来综合判断。
红外接近传感器属于开关量传感器,只能判断一定距离内有无障碍物,安装时须让传感器探头向前倾斜向下或正下方对着擂台,如图6 所示,若机器人车身出界,传感器则会有开关量信号变化。当机器人在擂台上时,传感器检测到擂台台面,视其为障碍物,此时传感器信号为0;若检测不到擂台,即传感器检测到无障碍物,车身某一侧已超出擂台边界,传感器信号为1。因此,在比赛前须调整红外接近传感器检测障碍物的有效距离,确保对机器人是否到达擂台边沿做出准确判断。

图6 边沿检测红外传感器调整示意图
3.4 对抗策略分析
如图7 所示,机器人正前方攻击支架上安装有1 个红外接近传感器,用来检测正前方是否有敌方出现;支架上方及车体后方安装有3 个红外测距传感器,用来侦测与敌方机器人的距离;底盘左右两侧2 个红外接近传感器除了作为软启动信号外,还用于检测左右两边的来敌情况。机器人通过3 个红外接近传感器的开关量状态,与前、后方3 个红外测距传感器值的不同组合,判断敌方的具体位置,然后进行间断性冲击或后退,控制机器人进攻或防守。
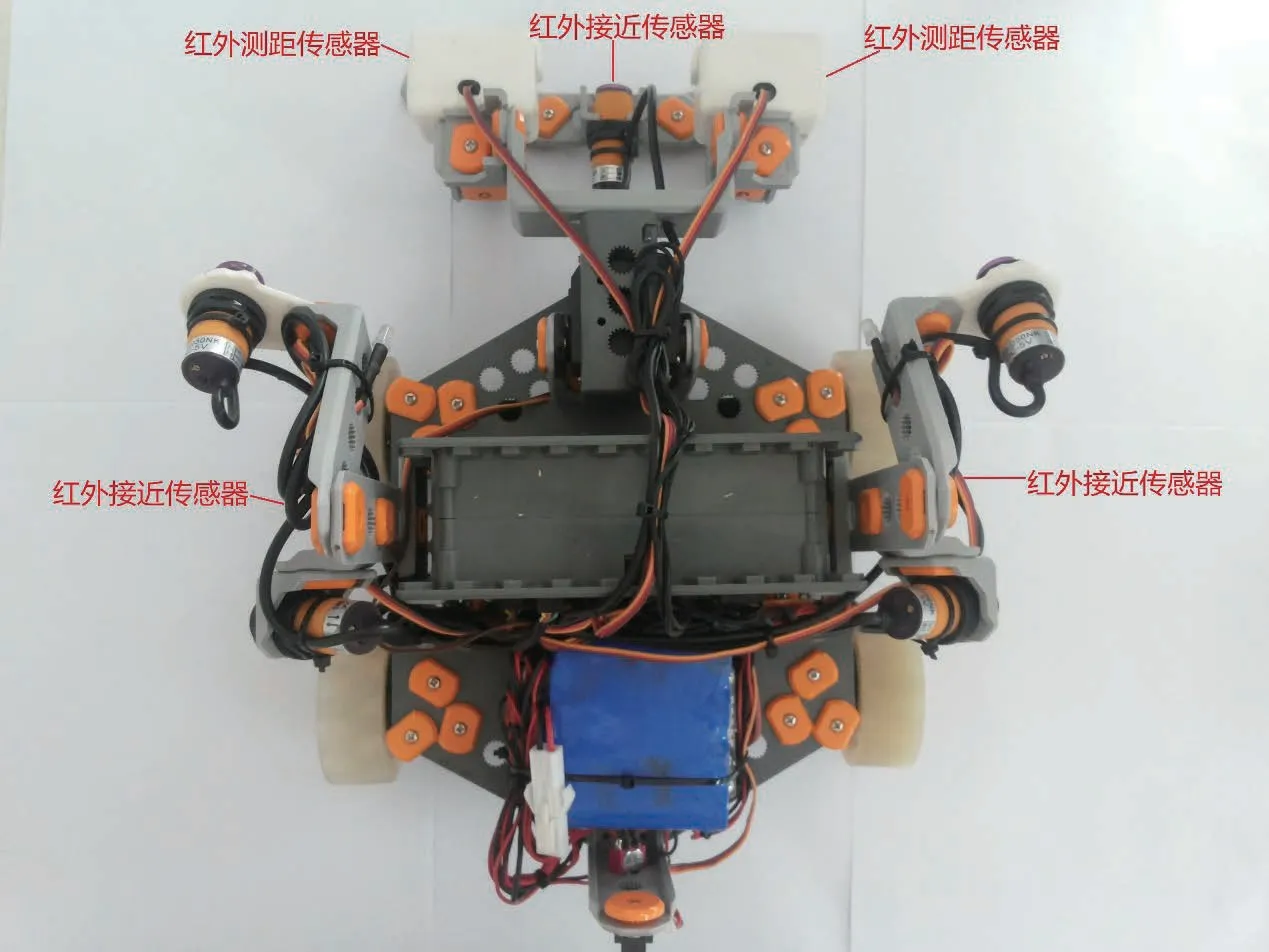
图7 侦测敌方用红外传感器安装示意图
机器人自主登台后,先检测自身是否在擂台上,确定在擂台上后再检测是否位于擂台边缘,若机器人在擂台上但处于擂台边缘,则立刻进行边缘处理,最后回到擂台中央位置;否则机器人朝车头方向直行并检测敌方,当检测到敌方时,进行对抗处理。机器人根据敌方检测的情况,采取进攻或防守策略处理。若检测不到敌方,机器人继续直行并检测边缘。
3.4.1 进攻策略
机器人若在正前方检测到敌方,先高速冲击敌方,尝试将攻击支架插入对方缝隙,再向左高速转向并抬起支架,之后向正前方加速并放下支架,利用车体的扭动及支架抖动,将对手向擂台某一边缘推动,同时检测自身的边缘情况,直至对方掉落擂台。
3.4.2 防守策略
若机器人正后方有敌人,则以较高的速度差速向前左转,直至摆脱敌人;若左(右)前方有敌人,则以较高的速度差速向前右(左)转,直至摆脱敌人;若正左(右)方有敌人,则以较高的速度差速逆时针(顺时针)旋转,直至正向面对敌人。
3.4.3 策略分析
由于受机器人结构设计的限制,攻击装置只能安装在正前方车头方向,因此,只有正前方面向敌人才能发起进攻,否则其他方向来敌只能防守,将车头转向敌人后方可进攻。
从比赛结果看,本文所设计的机器人正向对抗成功率约为70%,正后方及左、右前方来敌防守成功率约为50%,正左、正右方来敌防守成功率约为30%。比赛中遇到重量相同、攻击结构相似的对手,取胜率仅能达到50%左右;若对方增加攻击装置或重量,则很难取胜。
4 擂台赛经验总结
1)机器人登台动作无误,登台后停在擂台正中央位置为最佳状态。本文通过延时程序控制机器人轮子运动时间,来实现机器人最终停靠位置。赛前练习和比赛时场地用登擂台的斜坡长度和角度稍有不同,便会影响机器人最终停下的位置。如果登台时轮子运动时间过长,容易造成机器人登台后直接冲出擂台边界而掉落。因此,将边缘或边沿检测作为登台动作的约束条件十分必要。
2) 边缘检测与边沿检测的程序需相互结合。由于比赛场地光线条件会有所不同,如室外和室内、人多拥挤时和场地空旷时,光线差别较大,灰度传感器返回值的差别也较大,所以传感器阈值不宜设置过高,否则易发生检测不到边缘或只在边缘试探,导致机器人无法完成漫游巡敌工作。边沿处理要考虑机器人的惯性及尺寸,当某一侧边到达边沿时,若机器人转弯半径过大,容易造成一侧车轮掉落擂台的情况。
3)正前方检测敌人的传感器不宜放置在攻击支架上,虽然在擂台上对战时,攻击支架始终为放下状态,但进攻时激烈的冲撞容易损坏传感器探头,故考虑将传感器固定于机器人本体上并调整其感应距离更适合于攻击敌方。
4)从比赛对手的情况来看,适当增加车轮数量及车体重量,以此增加机器人在擂台上的正压力或摩擦力来提高机器人的抓地力,可在对抗中占据明显优势。仅靠正前方攻击对手的成功率太低,若采用前后2 个攻击支架,并将正前、正后来敌均采用进攻策略,可将取胜率提高1 倍以上。机器人的4 个轮子分别由电机驱动并采用独立电源供电,可大大提高机器人的动力性能,使得转向更加灵活,防守策略成功率亦可大幅提升。
5 结语
由于擂台赛属于竞技类比赛,对战双方的强烈冲击不可避免,因此,对抗型机器人本体结构应尽量紧凑,连接件应尽量牢固[4];机器人漫游巡敌策略应保证逻辑严密,边缘灰度检测及边沿检测的阈值和距离必须提前标定,确保比赛中机器人不会因误判而掉落擂台;适当增加机器人配重,改进机器人车轮驱动方式,亦可提高机器人攻击性能;对敌策略优化,应加入对敌方相对速度及加速度等条件约束,根据人工势场等算法改进进攻及防守策略,以期达到最优的比赛效果。
猜你喜欢
少林与太极(2022年6期)2022-09-14 08:59:42
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
趣味(数学)(2022年3期)2022-06-02 02:32:58
高技术通讯(2021年3期)2021-06-09 06:57:48
儿童时代·快乐苗苗(2018年7期)2018-09-03 18:46:52
无人机(2017年10期)2017-07-06 03:04:40
自动化学报(2017年5期)2017-05-14 06:20:56
通信产业报(2016年44期)2017-03-13 08:41:45
光学精密工程(2016年1期)2016-11-07 09:01:59
雕塑(1999年2期)1999-06-28 05:01:42