基于分层次多尺度分割的面向对象地物分类方法
2018-02-15 01:12陈俊任周晓华卢兴
江西测绘 2018年4期
陈俊任 周晓华 卢兴
(江西核工业二六八测绘院 江西玉山 334700)
1 引言
随着社会的进步与各类科学的发展,遥感技术也在与时俱进,遥感影像的分辨率也随着越来越多高分卫星的发射而不断提升,影像信息处理技术更加趋于成熟。原来由于各类科技水平的限制使得遥感影像的分辨率一直处在中低水平,图像较为模糊,导致土地利用覆被分类中,大多参考光谱特征进行处理,各类算法也大都是基于光谱特征或者基于像元为出发点[1]。基于像元的地物提取方法与算法无法较好的适用于高分遥感影像。如何高效、高质量地提取高分影像信息是目前高分影像应用研究的热点话题与难点问题。因此,本文研究基于多尺度分割的面向对象地物信息分类技术,深入分析高分辨率影像中主要地物的光谱特征、空间特征和纹理特征,并依据不同地物目标的不同特征建立多项规则。最后通过实验得出高分辨率遥感影像主要地物分类结果,并对结果进行精度评价,确认分类效果。
2 基于多尺度分割的面向对象技术
2.1 面向对象信息处理技术
面向对象信息处理技术适用于飞速发展高分辨率影像信息处理。面向对象信息处理中,处理对象不再是基于像元,而是以多边形实体作为最小单元,通过原始影像分割来创建最小单元[2]。每个像元中包含的信息量很少,而通过分割得出的多边形实体是部分像元的合集,像元依据分割时所设置的光谱特征和形状特征等综合条件形成许多大小、形状不一的像元块。多边形实体中不仅有像素的光谱信息,因为对象是像元块,所以还拥有形状信息、空间信息和纹理信息[3]。信息的处理过程针对多边形实体进行。因此,面向对象信息处理,可以充分应用到影像的光谱特征、空间特征和纹理特征等多种信息,很好的运用了高分影像独有的优点,较好的解决了分辨率过高带来的负面问题。
2.2 多尺度分割技术
遥感影像分割的过程就是创建多边形实体即最小单元的过程。影像分割技术的主要思路是利用区域合并算法分割遥感影像,即以某个像元为起点,计算该像元与其相邻像元合并后的异质性指数,若异质性指数小于设置的阈值,则将其合并,否则不合并[4]。影像分割完毕后,初始影像由众多大小不一的多边形区域构成,各多边形实体都有相应属性特征。最后经多次实验确定异质性的阈值,以获得最好的分割效果。多尺度分割流程如图1。

图1 多尺度分割流程
3 基于分层次多尺度分割的面向对象地物分类方法

图2 多尺度分割层次结构
3.1 多尺度分割的分类层次构建
对遥感影像分类前,必须对影像进行多尺度分割,影像依据异质性原则在设定的阈值下被分割成许多块大小不一的多边形实体即多边形对象,这些多边形对象就是后续地物信息提取的基本对象,也是最小单元。多尺度分割由于分割尺度的不同,分割出的对象大小也不同,对于不同的地物,需要与目标地物合适的尺度分割才能准确的分割出地物,创建出纯对象。当下,通常是通过分析目标地物的一系列相关特征来设置相应尺度,而一幅影像中一般都有多个地物需要提取,所以也需要多个不同的分割尺度去匹配不同的目标地物[5]。综上所述,建立多尺度分割层次是合理提取各类地物的必要过程,通过建立多尺度分割层次,创建自下而上的层次结构,合理有序的对影像进行多尺度分割操作,达到对不同地物的精确分割。多尺度分割层次结构图如图2。
从图2中可以看出,多尺度分割层次结构中,不同图层由不同分割尺度分割后的图层共同组成。本文经过多次实验后,确定了实验区域中几个主要地物信息的最佳分割尺度,并依据最佳分割尺度,创建了五个分割图层,这些图层依据分割尺度由大到小排列依次是水域图层、植被图层、道路图层、建筑物图层和极小尺度分割层。其中,水域图层为最高层,极小尺度分割层当作为最底层。前四个分割图层的部分区域结果图如图3所示。

图3 多尺度分割图层
3.2 隶属度分类
通过多尺度分割技术把高分影像分割成许多大小不一的多边形对象,以面向对象技术为原理基础,通过建立规则集的方式对影像地物信息做分类处理。在建立规则的过程中,主要使用隶属度规则即模糊规则来建立规则集。本文实验中,采用的隶属度分类不仅使用了模糊分类,也可以运用确定性分类即阈值分类。由于影像分割的尺度不同,提取目标的不同,多边形对象的质量也不同。对于分割后的纯对象,则可以使用确定性分类即阈值分类。纯对象中完全包含了目标地物,所以纯对象中的特征与目标地物的特征完全一致。在对其建立分类规则时,可以根据该地物的光谱特征、形状特征和纹理特征做分析,总结该地物与其他不同地物在信息特征上的不同,利用阈值的设置,把目标地物与其他地物区分开,从而对目标分类[6]。阈值规则法是建立规则的重要方法,可以有效、快速地区分出目标地物与其他地物。
3.3 地物分类规则建立及地物信息提取
地物分类规则的建立主要参考的是光谱特征与空间特征,而高分辨率影像的另外一个优势特征,即纹理特征,也可以充分运用。利用纹理特征提取时,通常利用灰度共生矩阵(GLCM)熵值去区分地物之间纹理特征的差别。在该函数计算中,如果目标对象纹理较为粗糙或较为平滑时,熵值较小;相反,如果目标对象纹理比较密集时,熵值则较大。
采用基于多尺度分割的规则集分类方法,以不同尺度分割下的影像层作为分类图层,在不同图层中分别提取与当前图层更加合适的地物。提取地物的过程中,添加多种函数或算法作为提取规则,充分利用规则将要提取的目标地物与其他地物区分开,尽可能的提高地物提取精度。而地类之间依据实际地物的形状特征确定相应最佳分割尺度,多尺度分割处理时,不仅要考虑分割尺度的问题,其他因子的数值也是分割处理需要考虑的重要部分[7]。对于不同的地物,通过不断实验找出适合该地物的各项因子数值或权重。本文对高分辨率影像的分类实验中,水域、植被、道路、建筑物和裸地等各类地物的最佳分割尺度与所有相关参数的最佳设置如表1。
3.4 主要地物分类结果
本文利用多尺度分割将高分影像分割成多个图层,建立多尺度分割层次结构,并在不同分割图层构建规则集提取相适应的地物类别,最后整合所有提取的地物得到高分辨率影像主要地物分类结果图。最终分类结果如图4所示。

表1 多尺度分割参数设置
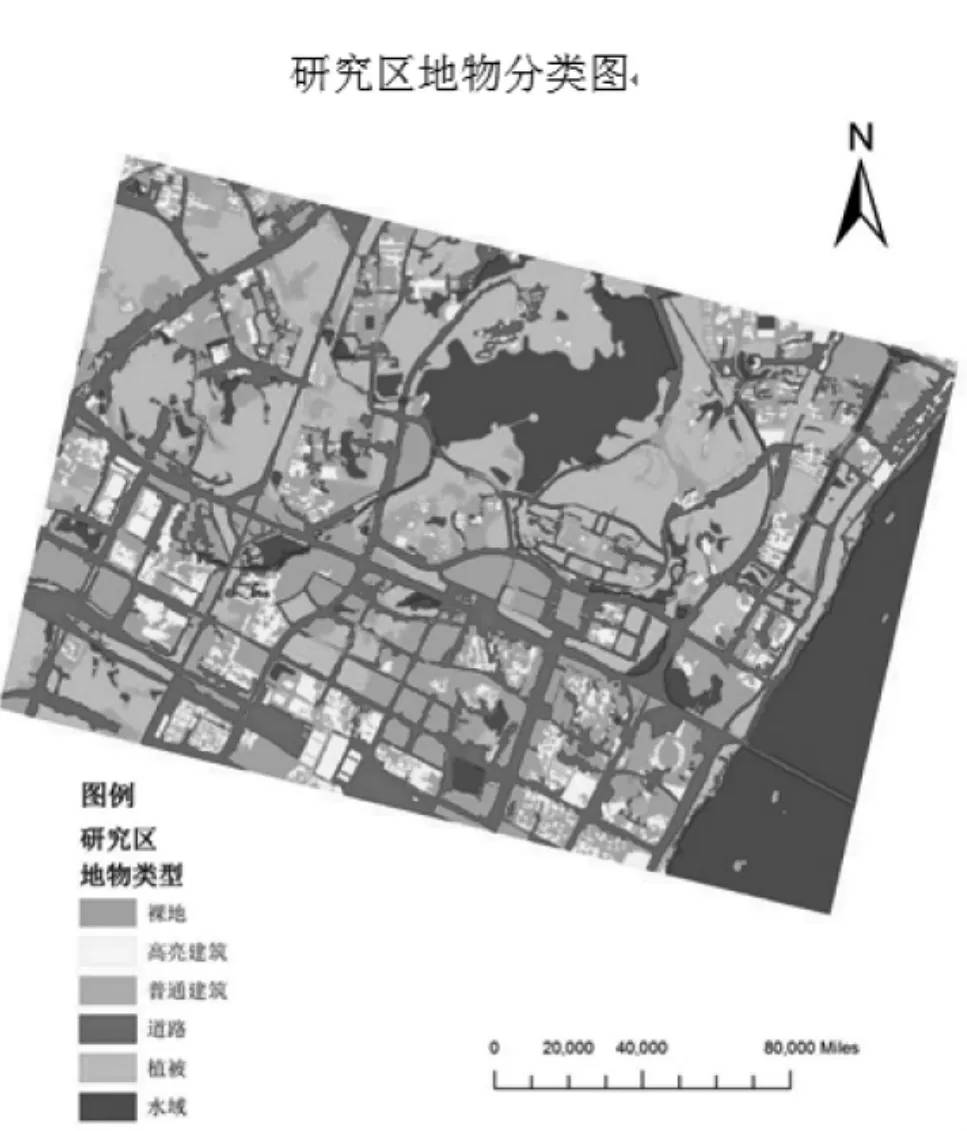
图4 基于多尺度分割与规则的主要地物分类结果
4 基于多尺度分割与规则集的分类结果精度评价
通过人工解译与实地调查,得出实验区域的真实地物信息参考标准。以此参考标准为误差矩阵评价中的标准数据,对本文的分类结果进行精度评价,最终得到实验区地物分类的误差矩阵表2。从表2中可以看出,水域类、植被类、道路类与高亮建筑物类别达到了90%以上的分类精度,尤其是水域、植被和道路的分类,三者平均精度达到97%以上。但是裸地与普通建筑物的分类与前者相比,精度差上不少,尤其是普通建筑物的提取效果比较差。主要原因是实验影像的分辨率稍显不足,在形状特征与纹理特征上都受到影响。如果要更好的提取这类矮小建筑物,需要更高分辨率的影像。
整个分类结果的总体精度达到了93.59%,取得了较高的分类精度。Kappa系数0.918,说明从各方面来说,本文分类方法都达到了优良的效果。

表2 基于多尺度分割与规则集的分类结果的误差矩阵
5 结束语
本文针对高分辨率遥感影像,对多个分割图层建立基于多尺度分割的分类层次结构,将不同图层提取的不同地物类别相联系。然后,对不同地类建立相应的规则集以提取各个地物,并将所有提取的地物进行整合,得到实验区主要地物分类结果,其分类精度效果不错,但本文方法总体上属于半自动处理,人工操作主要是对于最佳尺度与分割参数的设置方面。寻找最佳尺度与分割参数需要大量的实验,并且对于不同地物需要不同尺度。因此,对于自动选取最佳分割尺度与参数的研究是以后多尺度分割的一个重要研究方向。
猜你喜欢
中学生数理化·七年级数学人教版(2022年9期)2022-10-24
少年漫画(艺术创想)(2020年2期)2020-06-15
中学生数理化·七年级数学人教版(2019年9期)2019-11-16
趣味(数学)(2019年11期)2019-04-13
摄影之友(影像视觉)(2017年8期)2017-11-27
现代计算机(2016年12期)2016-02-28
地理教学(2015年18期)2016-01-06
影像研究与医学应用(2015年6期)2015-08-15
中国交通信息化(2015年6期)2015-06-06
中国舰船研究(2014年4期)2014-05-14