基于支持向量机与DS证据理论的复合触发技术
2018-02-09 07:18王泽民
计算机与数字工程 2018年1期
吴 腾 王泽民
(西安工业大学电子信息工程学院 西安 710021)
1 引言
武器系统的射击精度与立靶密集度是权衡武器系统外弹道性能的重要指标,CCD立靶[1,13]具有测试精度高、测量误差小、布设与操作简单、系统自动化操作程度较高等优点而得到了广泛应用。由于CCD立靶在工作时图像数据采集速度要求非常快[2],无法实现实时存储与处理,因此常通过外部触发信号控制CCD立靶的图像采集,使其图像采集时间涵盖弹丸穿过测试靶面前后。传统的触发方式都是采用炮口火焰、激波、天幕靶等单一方式,其中炮口火焰最为稳定可靠,但是很难精确控制图像采集时间,容易出现漏测现象,而且数据采集量较大;激波触发方式结构简单、设备布设方便,但是容易收到环境噪声影响而误触发,而且对于亚音速弹丸的探测性能较差;天幕靶具有和CCD立靶相似的探测靶面,可以在空间上准确布设,从而实现对图像采集时间的精确控制,大大缩减图像存储和处理量,但是天幕靶的探测视场和靶面大小很难满足CCD立靶的靶面需求。本文提出采用支持向量机与DS证据理论信息融合的理论[3,6],将被测试武器的枪炮口火焰[4]、弹丸激波[5]、弹丸着靶速度等信息进行融合,利用多传感器数据融合的技术[7]对预定弹道上空的高速飞行弹丸目标(炮弹、枪弹)进行弹道估计,实现复合触发技术。该技术克服了在野外试验现场的复杂环境条件下的影响,极大降低了CCD立靶对伪目标识别的虚警率,提高了CCD立靶的可靠性。同时,进一步减少了CCD立靶捕获目标时的图像采集时间,减少了系统的图像处理量,提高了系统的实时性。
2 CCD立靶触发技术简介
目前CCD立靶常用的触发技术有三种,分别是枪(炮)口火焰触发技术、激波触发技术以及天幕靶。
2.1 枪(炮)口火焰触发技术
针对火炮发射时炮口火焰所对应的不同红外光谱频率,选择与之对应的红外光谱探测器,当红外探测器捕捉到炮口火焰的红外信号时,炮口火焰探测器则向控制器输出触发信号,此过程即为炮口火焰触发。
炮口火焰触发技术的优点在于对红外目标信号的高捕获率,整体可靠性优于其他单一触发方式。其缺点在于应用炮口火焰触发方式时,CCD立靶的图像采集时间过长,造成CCD立靶系统对于存储、处理图像的工作量急剧增加。
2.2 激波触发技术
采用电容式声传感器,捕捉弹丸在超音速飞行过程中与空气大气摩擦产生的冲击波,随即输出触发信号。
激波触发技术的缺点在于不能捕捉低于音速的目标;其次,激波触发技术只能捕获在弹道上空的目标,一旦偏离,便无法捕获。
2.3 天幕靶
利用光电转换原理作为启动和停止装置的测速靶。当弹头从光幕上方通过时,改变了落在光电管上的光,于是产生一个信号,使计时仪开始或停止工作。
天幕靶的优点在于可以精确测量弹丸的飞行时间;其缺点在于,由缺乏一般的空间分辨能力,使用上受到限制。
鉴于以上三种触发技术的优缺点,本文提出三种触发技术相结合的复合触发技术,通过对三种触发信号的融合处理提高触发的可靠性和效率。
3 支持向量机(SVM)与DS证据理论的多探测器信息融合方法
在CCD立靶复合触发系统的多探测器信息融合理论框架中,每一部探测器对目标的识别分类所提供的信息都具有相对的不完整、不精确、信息模糊等特性。多探测器信息融合决策中心最终根据这些包含着大量不确定性的初步信息进行处理,对疑似弹丸目标进行状态估计、身份识别等信息处理,并且利用DS证据理论信息融合技术对所获取的信息进行加权融合。同时,引入置信度区间的概念,将基本概率赋值函数和相应的鉴别框架合并成为一个新的证据体。CCD立靶复合触发的实质即就,多探测器信息融合技术基于同一个识别框架,利用合并规则将所有探测器捕获的目标状态信息合成为一个证据体,经过信息融合之后产生的新证据体根据最终决策规则实现对疑似弹丸目标的决策分析,最终确定疑似弹丸目标是否为真目标。[6]
3.1 支持向量机(SVM)对疑似弹丸目标进行状态估计
支持向量机,具有优异的小样本分类特性,主要采用投票法输出测试样本的分类标签。本论文利用支持向量机将探测器获取的疑似弹丸目标信息进行预处理,与其训练样本匹配进行识别分类,获取疑似弹丸目标的状态估计,包括对目标的初速度、着靶速度、存速率以及预计弹道等目标状态识别。
对于疑似弹丸目标的状态估计,依据速度门限的设定,分为门限Ⅰ、门限Ⅱ以及门限Ⅲ。其中,门限Ⅰ代表着弹丸出膛时的初速度,依据现有公开资料,针对不同类型的枪械、火炮外弹道性能,门限Ⅰ的范围在700m/s~1900m/s区间内;门限Ⅱ,代表着弹丸在测试时的着靶速度,其范围通常为同一目标的门限Ⅰ速度范围的70%~80%;门限Ⅲ代表着弹丸的存速率,即弹丸着靶速度与初速度的百分比,此时,依据不同测试靶距、测试环境等外界因素的影响,门限Ⅲ的数值范围在60%~85%区间内[16]。
炮口火焰探测器探测到炮口焰的时刻计为T0,激波探测器接收到弹头激波信号的时刻计为T1,弹头的飞行时间计为T1-T0时,与此同时,弹头的飞行距离为S1+S2,其中,S1为炮口到激波探测器的距离,S2为弹头越过激波探测器直至被激波探测器所捕获到的时间段内飞行的距离。
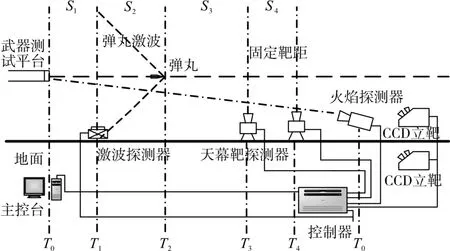
图2 多模复合触发设备布放示意图
利用炮口火焰探测器与激波探测器对弹头的初速度V进行测量,设弹头的飞行速度为V,即

由激波探测器的探测特性可知,当弹头飞过激波探测器的距离为S2时,探测器才能捕获到激波信号,我们设声音的空气中的传播速度为340m/s,H表示弹头进过激波探测器的高度,即
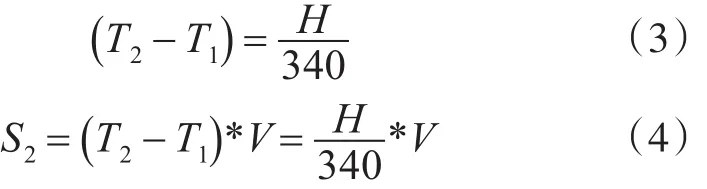
由式(2)可知
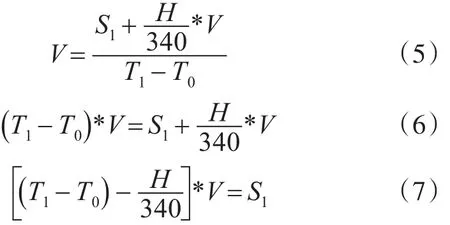
由上式可知,弹头的初速度为

由图1可知,弹头的着靶速度V'可由天幕靶进行测算

其中,S4为天幕靶1与天幕靶2之间的靶距,T3为弹头经过天幕靶1的时刻,T4为弹头经过天幕靶2的时刻。
利用混淆矩阵[3,14],本论文进行状态估计的可信度匹配,由混淆矩阵所提供的识别率对分类器的局部可信度进行描述,在CCD立靶测试过程中,假定进行某型号武器的k连发测试,对于复合探测触发而言,即一个包含有k类模式的分类辨识,待识别数据集X中包含N个样本,每一类模式的分类识别任务当中分别包含有 Ni个样本()i=1,2,…,k。因此,混淆矩阵C可以用以下矩阵表示:

其中,cij代表分类器将ωi类模式判别成为ωj类模式的数据占原先第ωi类模式整体总样本的百分比。在混淆矩阵C中,矩阵元素的行下标表示疑似目标的真实属性,列下标表示分类器所产生的辨识识别属性,矩阵对角线上的元素表示在各个模式下分类器所能够正确识别辨识的百分占比,非对角线上的元素表示判别之后所产生错误判断的百分占比,混淆矩阵的行向量ci(i =1,2,…,k )则表示模式ωi所对应的目标在分类过程中对各模式所具有的倾向性。通过混淆矩阵,可以获得分类器对疑似目标进行判别所得到的正确识别率和错误识别率:
各模式的正确识别率:

平均正确识别率:

对于判别问题,输入可以通过输出反推,同时,由混淆矩阵则能够推出,当分类器L输出类别ωj时,当前样本x的真实类别条件下时ωi的概率为

将PCl(ωi|ωj) 记作 PCl(ωi),则 PCl(ωi)代表当前目标属于ωi类的支持程度,即对分类器的局部可信度的一种程度上的度量。
3.2 Dempster—Shafer证据理论
在DS证据理论体系[10]的框架下,一个样本空间则被称之为一个辨识框架,在本论文当中使用U表示辨识框架,其中,辨识框架U是关于命题的可能结果或者假设结果的一个有限集合。
定义1,假设U为辨识框架,若函数m∶2U→[0 , 1](其中,2U表示属于U的所有子集)满足:
其中,m(A)则代表的是命题A的基本概率赋值函数(BPA),其代表对命题A的直接支持程度。条件(1)表示对于空集或空命题不产生任何可信度报告;条件(2)表明虽然决策控制中心能够对命题赋予任意大小的信任度,但决策规则要求决策控制中心最终赋值给所有命题的信任度之和为1,即为总信任程度为1。
定义2,设U 为辨识框架,m∶2U→[0 , 1] 为基本概率赋值函数,定义信任函数Bel∶m∶2U→[0 ,1] ,若其满足条件:

命题A的所有子集的可能性之和由Bel(A)表示,其代表的总信任度针对命题A。此时,由上式可知,Bel(ϕ )=0,Bel(U)=1。
定义3,设U 为辨识框架,m∶2U→[0 ,1] 为基本概率赋值函数。若其满足:

则似然函数为Pls∶2U→[0 , 1] 。 Pls(A)表示对于命题A不否认其程度大小,这其中包括了所有与命题A相容集合的基本可信度。
似真函数与信度函数之间有如下的数值关系:

似真函数Pls(A)可以代表的是被探测主体在命题A的条件下的信任程度,对于任意命题A,Pls(A)比Bel(A)的判别更加宽松。基本概率赋值函数m(A)、信任函数Bel(A)和似真函数Pls(A)它们三者都是彼此惟一确定的,它们是同一证据在不同需求下的不同表达方式。
DS融合规则[10]是DS证据理论信息融合的核心,将探测器初步获取到的疑似目标数据经过预处理之后的相互独立的证据进行信息匹配融合,从而产生可靠程度更高的新证据体,其合成公式为:
设信任函数BEL1和BEL2同属于识别框架U,m1和m2分别是其对应的BPA,焦元分别为B1,…,Bk和C1,…,Cr,则
4 仿真与试验结果及分析
在支持向量机的仿真当中,假定产生500个(0,0)、(2,2)为中心点,均值为2的两类二维正态数据分布,生成正类和负类数据。如图3所示。
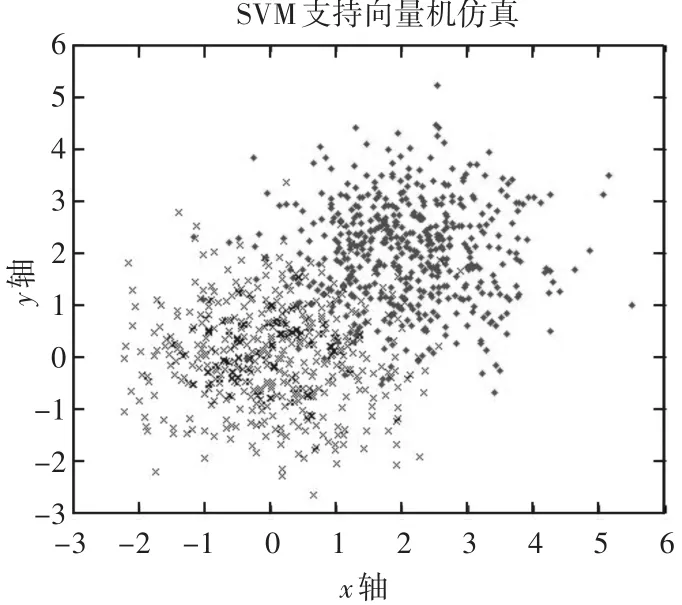
图3 正负类数据分布仿真图
由图3可知,采用支持向量机的方法,对数据集的可分性、识别能力比较好。
在DS证据理论仿真当中,每个特征基于欧氏距离的基本概率赋值以及融合后的概率赋值,并根据决策规则判断是疑似目标否为真实的被测弹丸目标。

图4 DS证据理论信息融合仿真图
两组数据,一组生成200个均值与方差分别为2、2的样本,另一组生成200个均值与方差分别为-2、4的样本,生成待测样本如图4所示,融合情况达到预期目标。在通常情况下,单一证据对疑似目标进行识别时,所对应的基本概率赋值通常比较小,以至于无法进行信息融合决策,随着所得到的信息增多,更进一步地进行信息融合,对于相互矛盾的和不确定性的概率将逐步减小,基本概率赋值将逐渐增加,支持度持续增高,此时,可以对目标进行比较准确的识别工作。利用DS证据理论对火焰探测器、激波探测器以及天幕靶三部探测器经过处理之后的信息进行融合,得到的判断结果更加可靠,决策的可信度大幅度提高,其对目标的识别率优于单一触发,并且进一步降低了系统对伪目标的识别率,降低了系统虚警的发生概率。
表1所列出的数据是CCD立靶采用炮口火焰触发与复合触发采集图像的时间比对,实验在200m的靶道进行,所用的武器为某型步枪,子弹初速度由靶场所提供的仪器测得。枪(炮)口火焰触发信号由炮口火焰探测器输出,复合触发信号由炮口火焰探测器、激波探测器结合天幕靶的模拟信号输出。

表1 CCD立靶采用炮口火焰触发与复合触发的图像采集时间对比
此次试验过程中,CCD立靶相机的采集频率设定为每秒20000行,每行图像的内存大小约为4KB,为了不漏测弹丸,通常设定图像采集时间为2s,即2000ms,最终,采用传统炮口火焰触发的弹丸图像的内存大小约为156MB,采用复合触发的弹丸图像的内存大小约为8MB。

图5 CCD立靶捕获到的高速飞行的弹丸图像
图5为高速飞行的的弹丸被CCD立靶捕获到图像,由图像我们可以看出,在极短时间内采集的图像存在其他伪目标的干扰的概率极小。图像采集时间过长会有其他伪目标侵入图像的风险,从而造成CCD立靶系统对弹丸目标多测、漏测、虚警等现象的发生,影响武器系统的正常测试工作。同时,复合触发将CCD立靶图像理论采集时间由256.410ms减少到38.461ms,进一步减少了CCD立靶捕获目标时的图像采集时间,减少了系统的图像处理量,提高了系统的实时性。
5 结语
本论文提出了利用支持向量机与DS证据理论相结合的方法,将炮口火焰探测器、激波探测器和天幕靶所获取的信息进行信息融合,探测高速飞行弹丸目标。依据支持向量机所获得的分类的实际结果,从所得结果中获取目标的分类标签和混淆矩阵所得到的正确识别率等信息用来构造待加权融合的证据。由实验结果可以看出CCD立靶系统采用复合触发,极大降低了CCD立靶对伪目标识别的虚警率,提高了CCD立靶的可靠性。同时,进一步减少了CCD立靶捕获目标时的图像采集时间,减少了系统的图像处理量,提高了系统的实时性。
猜你喜欢
指挥控制与仿真(2021年6期)2021-12-17
火炮发射与控制学报(2021年1期)2021-05-13
航空学报(2020年8期)2020-09-10
航空发动机(2020年3期)2020-07-24
弹道学报(2019年4期)2020-01-10
兵器装备工程学报(2019年10期)2019-11-08
实验流体力学(2018年3期)2018-10-10
东坡赤壁诗词(2018年2期)2018-05-10
北京航空航天大学学报(2017年8期)2017-12-20
电影新作(2014年4期)2014-02-27