
数显扭力扳手的设计
2018-01-25 10:52侯飞
时代农机 2017年11期
侯 飞
(衢州亿龙信息技术有限公司,浙江 衢州 324000)
数显扭力扳手顾名思义就是带数字显示的扭力扳手(扭矩扳手,力矩扳手),它是在机械扭力扳手的基础上发展而来,其功能更加强大。数显扭力扳手自出现之日起已经有了长足的发展,技术方面日渐成熟。其拥有强大的操作功能,包含扭力设定;单位设定;模式设定;数值储存;数值清除以及数值输出等。
数字扭力扳手是扭矩扳手中最高级的一种,不但能够当施加的扭矩达到设定值时,扳手会发出“卡塔”声响或者扳手连接处折弯一点角度,而且会通过数字显示屏或者LED灯来提示使用者,而且在扭矩的设定上也能够通过按键和数字显示屏来完成,比之非数显扭力扳手更方便也更易与操作。总而言之数显扭力扳手是扭矩扳手中最易于操作的,它通过安装数字显示屏降低了对操作人员的要求。
数显扭力扳手的技术被国内几家公司垄断,他们利用手中的技术控制着一些小型企业。他们高价出售自己的核心板从中赚取利润。这种方式大大制约着小型企业的发展,并且也是数显扭力扳手价格高的原因。现在市场上出现了形形色色的数显扭力扳手,功能大致一样,但是其性能存在很大的差异。最主要的差别在于处理器的处理性能、硬件电路的体积以及产品的节能方面。厂家为了减少科研经费,只用以前成型的技术进行生产,这样也迟滞了数显扭力扳手的技术进步。现在大部分的扭力扳手存在着一些问题,如处理速度慢,准确度不高,而且经常更换电池 ,给生产方面带来极大的不便。
现在市场上的数显扭力扳手价格相当昂贵,对于普通的公众难以接受。随着一些低价格、高性能芯片的出现,现在的扭力扳手显得有些过时,并且价格过高,迟早要被淘汰。因此,研发一款性价比高的数显扭力扳手将有很大的市场前景。而且对于它的研发也可以打破行业间的技术垄断,增强小型企业的竞争力,也为其本身的完善打好基础。
1 系统工作原理图
数显扭力扳手系统工作原理图如图1所示,其核心组成包括MSP430F4270单片机和扭矩传感器,以及液晶显示和声光报警的人机交互部分。扳手连接完成后,由人控制扳手臂旋扭螺母,扭矩传感器获得电压值送给单片机的放大电路,放大出来的电压再由单片机处理后在段式液晶上显示出来,并在一定条件下启动声光报警装置。
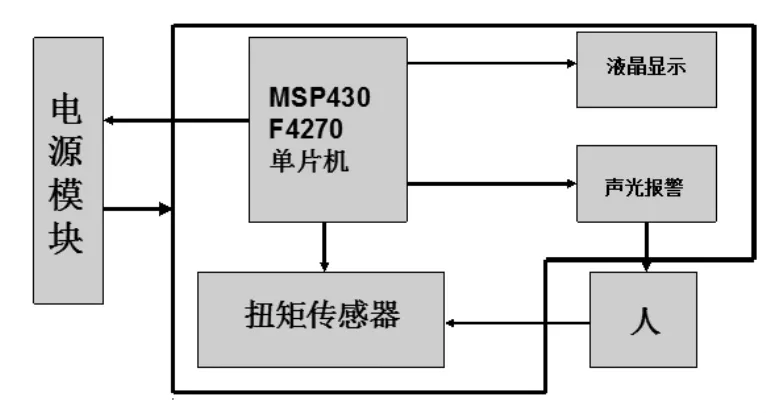
图1 系统工作原理图
2 硬件部分
本项目中的扭力扳手检测装置由标准扭矩传感器、扭矩测量仪表两部分构成,硬件构架主要包括单片机、显示模块、电源模块、声光报警模块、扭力采集模块等部分组成,其电路硬件原理图如图2所示。图3所示是其硬件的PCB图。图4是其制作完成后的实物图。

图2 电路硬件原理图

图3 电路硬件PCB图
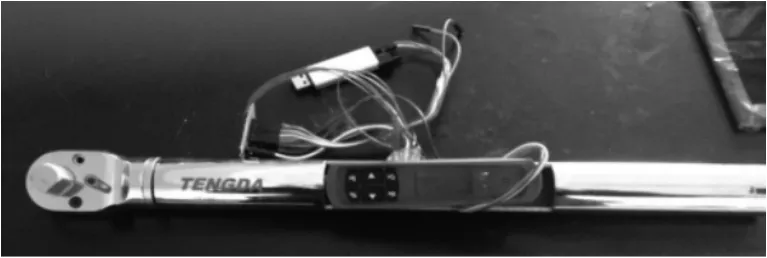
图4 电路硬件实物图
3 软件部分
本项目中的扭力扳手装置内的程序其流程图如图5所示。操作过程如下:①电源打开后程序开始运行,系统进入工作模式;②系统工作之初要进行程序的初始化,使程序进入正常状态;③显示程序驱动液晶显示出扭力值;④单片机对输出的扭力值进行判断;⑤扭力值大于设定值,声光报警系统启动,提示外力停止施力;⑥扭力值小于设定值,外力继续施力,直至报警提示,否则程序循环;⑦单片机关闭程序,程序结束。
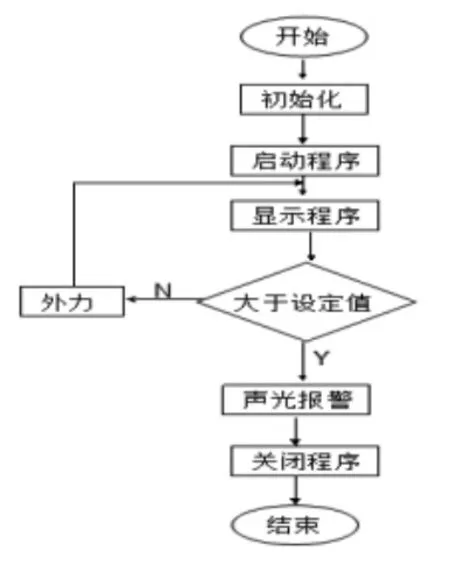
图5 程序流程图
4 系统方案总结
根据本项目的研究结果展开了以下3点总结分析:
(1)标准数据与实验数据,如表1所示。

表1 标准数据与实验数据比较表格
(2)实验数据分析。从表1可以看出测量值是与实际值有一定差别的,并且测量值的数据规律性不强,抖动性强烈,其原因是与信号采集模块有关。还有一点,实验数据都比标准数据小,其存在的原因是扭力扳手的头相对而言重量大,在重力作用下产生一定的扭力值叠加到实验数据上造成一定偏差。
(3)系统改进。上面已经得出了产生误差的原因解决方案如下:①针对其数据的抖动性,改进方式是滤波电路的改进。基于信号的等级选取适当的滤波电路。取一次值也影响到扭力值的精确性,所以采测量多次值然后取其平均值的方式;②平衡重力所产生的误差。通过多次实验测得扭力机械结构所产生的扭力大小,在不同方向用力时加或是减掉这一值。
[1]李秀忠.单片机应用技术[M].北京:人民邮电出版社,2007.
[2]李全利.单片机原理及应用技术[M].北京:高等教育出版社,2008.
[3]魏小龙.MSP430系列单片机接口技术及系统设计实例[M].北京:北京航空航天大学出版社,2002.
[4]何立民.MCS-51系列单片机应用系统设计系统配置与接口技术[M].北京:北京航空航天大学出版社,1990.
[5]刘志峰,刘光复.绿色产品设计与可持续发展[J].机械设计,1997,(1).
[6]甘作霖,王鹤.液压脉冲气扳机[J].凿岩机械气动工具,1991,(3):17-22.
猜你喜欢
消费电子(2022年7期)2022-10-31
橡塑技术与装备(2022年6期)2022-06-02
中国交通信息化(2022年3期)2022-06-01
通信电源技术(2020年11期)2020-09-07
凿岩机械气动工具(2017年3期)2017-11-22
军营文化天地(2017年7期)2017-09-25
电子技术与软件工程(2016年23期)2017-03-06
军事文摘·科学少年(2016年8期)2016-11-02
军事文摘(2016年16期)2016-09-13
兵器装备工程学报(2015年8期)2015-05-06
