多功能护理床按摩装置的结构设计与分析
2018-01-25 03:44:18杨辉
辽宁工业大学学报(自然科学版) 2017年6期
杨 辉
多功能护理床按摩装置的结构设计与分析
杨 辉
(常州工学院 机械与车辆工程学院,江苏 常州 213032)
由于现行的多功能护理床功能模块化的设计方案,使其无法添加按摩模块。针对现有护理床设计上的弊端,采用链接的软床板替代原来的功能模块化床板,结合人机工程学原理及滚动、敲打等按摩手法,设计了前后往复直线运动的按摩小车以完成全身波浪形的滚动按摩及全背部的电磁振荡式敲打按摩,并对其进行运动仿真分析以验证其结构设计的合理性。该按摩小车还能辅助完成做起、曲腿等功能,该设计较好地解决了因长期卧床而引起的褥疮、肌肉萎缩等难题,为新型多功能护理床的研发奠定了坚实的理论基础。
按摩装置;运动仿真分析;护理床;按摩手法
目前,全球已经进入人口老龄化社会,中国是世界上唯一老年人口过2亿的国家,随着我国人口老龄化的加速发展,失能、半失能老人数量也将逐年增加[1-2]。由于这部分老人大部分甚至全部时间都在床上度过,需要家人及护理人员经常帮助其实施被动运动和肌肉按摩,以促进血液循环、改善神经功能、防止肌肉萎缩和关节僵直,避免形成褥疮及功能性并发症,从而加大家庭护理的强度和难度。而目前研发的护理床都是采用功能模块化的设计方案,几乎都围绕着抬背、曲腿、侧翻身、排便等功能的开发,由于受这种结构设计弊端的影响,根本无法在床下安装按摩装置[3-5]。针对这种情况,研究者们纷纷将研究目标转向为在床上单独使用的按摩装置,如按摩气垫、按摩机器人、柔性按摩手等[6-8]。虽然这些装置可解决病人在长期卧床过程中所引发的褥疮及肌肉萎缩等,但使用床上按摩装置时,不仅需要经常搬动位置,而且每次按摩时都必须将病人调整到合适位置,这无疑增添了许多不必要的麻烦。为有效解决瘫痪病人的按摩问题,本文打破常规护理床的设计模式,通过采用链接式软床板代替多块功能模块化床板,利用床下两个可直线往复运动的按摩小车,来实现全身波浪式滚动按摩及背部全方位的电磁振荡式敲打按摩,及辅助完成抬背、曲腿、排便等功能,以解决长期困扰卧床老人的护理难题,为开发新型的多功能护理床开辟了一条新路。
1 按摩装置的结构设计
1.1 按摩装置的设计思想及布局
对于长期卧床的瘫痪病人这种特殊群体,在设计护理床时既要考虑到床的功能,又要兼顾到其生理上和心理上的需求。为避免将按摩装置布置到床下会影响到位姿变换、辅助排便等部分功能的实现,提出了将常规护理床的部分功能与按摩装置集成到前后往复运动的2个小车上的想法。即2个小车上除了安装按摩装置外,将利用前小车的垂直升降机构辅助抬背、平躺;后小车辅助将坐便器运到指定位置,及向上曲腿到合适角度、防止做起时身体滑落等。参照传统中医的按摩手法,结合瘫痪病人的身体机能特点,采用全身波浪式滚动按摩及背部振荡式敲打按摩的手法。根据GB/T10000—1988中国成年人人体尺寸标准及护理床尺寸设计要求,将护理床的尺寸设定为2 000*900*700 mm[9-10],床上按摩装置的布局及三维装配图如图1所示,后小车和排便装置如图2所示。

图1 按摩装置的布局及装配图
1—导轨;2—齿条;3—后按摩小车;4—前按摩小车
安装在床架上的2条导轨及齿条长度分别为 2 000 mm和1 960 mm,导轨间距为500 mm;为满足前、后按摩小车的功能需求及防止其运动干涉,设置前按摩小车沿导轨往复运动的最大行程为860 mm,后按摩小车的最大行程为1 000 mm。按摩滚轮间距为520 mm,其垂直升降幅度可调;装于前按摩小车上的2个背部振荡按摩块的水平往复直线运动的最大行程为200 mm,即沿背宽方向的最大行程为400 mm。

图2 后小车和排便装置的三维模型图
1.2 按摩装置的直线驱动机构的结构设计
按摩装置的直线驱动机构三维模型图如图3所示,按摩装置安装于底座的上面,直线驱动机构位于底座的下方。直线驱动机构主要包括滑块、导轨、驱动电机、联轴器、齿轮、齿条等。滑块固定于底座的下方,分别与安装于床架底座的左右两侧导轨滑动配合;“m”形电机支架固定于底座的下方,驱动电机和齿轮安装于电机支架上并通过联轴器相连接,齿轮与安装于床架底座上的齿条相啮合。
工作时,驱动电机通过联轴器驱动齿轮、齿条进行啮合运动,将电机的旋转运动转换为齿轮齿条的直线运动,使滑块沿着导轨进行相应的同步直线运动,并通过改变电机的转向,将单方向的直线运动变换为直线往复运动。由于按摩装置通过底座固定于直线驱动机构上,因此通过控制电机的转速和方向,即可控制按摩小车(按摩装置和直线驱动机构的总成)沿纵向移动的速度和方向。

图3 按摩装置的直线驱动机构
1—导轨;2—齿条;3—滑块;4—驱动电机;5—联轴器;6—齿轮;7—电机支架;8—底座
1.3 滚动按摩装置的结构设计
在前、后按摩小车上均装有滚动按摩装置,其结构如图4所示。

图4 滚动按摩装置结构图
1—按摩滚轮;2—支架;3—导向套;4—导柱;5—横梁;6—电动推杆
该按摩装置主要由按摩滚轮、支架、导向套、导柱、横梁及电动推杆等组成,按摩滚轮通过转轴与横梁相连,导向套安装于支架上,对称布置于左右两侧,确保导柱沿着导向套上下滑动;电动推杆安装在固定于底座的U形架中,它是一种将电动机的旋转运动转变为推杆的直线往复运动的电力驱动装置。当电动机驱动电动推杆垂直上升或下降时,按摩装置两侧均布的导柱沿着导向套同步上升或下降,平稳地推动与横梁相连的按摩滚轮上升或下降,其波浪式滚动按摩效果如图5所示。

图5 滚动按摩示意图
通过调整电动推杆的升降幅值、速度及驱动直线往复机构的电机转速,可改变按摩隆起的幅度及间距,即变换滚动按摩的模式。
1.4 电磁振荡式敲打按摩装置的结构设计
前小车上除了安装滚动按摩装置外,还安装了电磁振荡式敲打按摩装置,其结构如图6所示。
该结构主要由牵引机构和电磁振荡式敲打按摩组件及其控制器组成;牵引机构主要由牵引电机及其固定板、曲柄、第一线轮、2个第二线轮及2个第三线轮、2根导向杆及3个安装第二、第三线轮的限位块。电磁振荡式敲打按摩组件由底座、弹簧杆、固定板、按摩块组成,按摩块通过限位布带固定于弹簧杆上部的固定板上,弹簧杆的下端与底座活动连接,因而弹簧杆可在竖直方向上形成一定的伸缩空间,使按摩块与床面始终保持接触,并起到良好的缓冲作用。
该按摩组件分别装于3个限位块间,且其底座与导向杆滑动配合。绕过第一线轮的2根牵引绳分别通过第二线轮后与其对应侧的底座螺栓头缠绕连接;另一根牵引绳的一端与底座另一侧的螺栓头缠绕连接,之后绕过第三线轮系在对应侧的拉簧上。
当牵引电机转动时,第一线轮以曲柄为半径绕牵引电机的输出轴做圆周运动,从而通过牵引绳分别带动左右两侧的按摩组件沿着导向杆做左右往复运动。当第一线轮由上部旋转到底部时,牵引绳通过第一线轮、第二线轮拉动按摩组件沿着导向杆由外侧向里侧水平滑动到中间限位块的限位螺钉位置,从而拉动牵引绳绕着第三线轮向中间同步移动,使两侧的拉簧伸长;当第一线轮由底部旋转到上部过程中,拉簧借助于弹性恢复力再通过牵引绳将按摩组件拉回外侧。
这种牵引机构相当于一种变异的曲柄滑块机构,绕过第一线轮(动滑轮)和第二线轮(定滑轮)的牵引绳相当于连杆;绕过第三线轮的牵引绳与拉簧相当于辅助牵制与拉回机构,这种机构一方面使按摩组件沿导向杆的水平位移增大3倍,另一方面控制了按摩组件的滑移速度,按摩块对背部的电磁振荡式敲打按摩模式由与其相连的控制器控制,按摩者可根据自己的喜好选择该控制器上的相应按钮进行按摩。
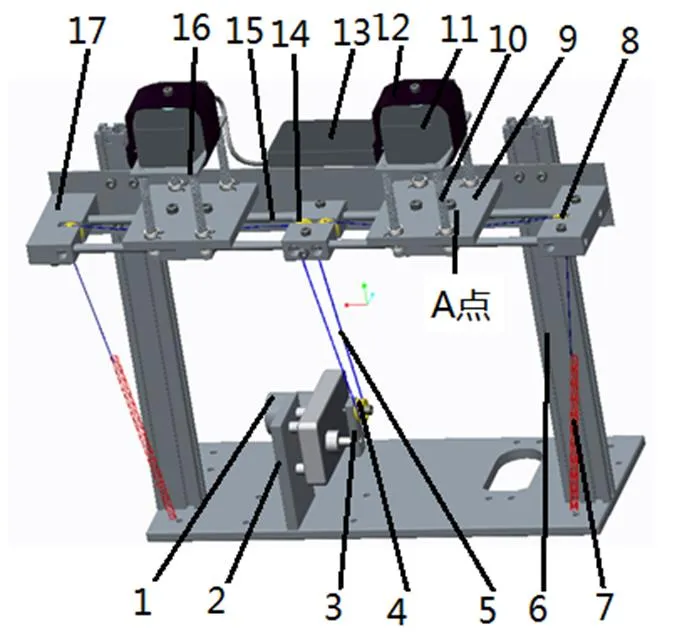
图6 振荡按摩装置结构图
1—牵引电机;2—电机固定板;3—曲柄;4—第一线轮;5—牵引绳;6—固定支架;7—拉簧;8—第三线轮;9—底座;10—弹簧杆;11—按摩块;12—限位布带;13—控制器;14—第二线轮;15—导向杆;16—固定板;17—限位块
前按摩小车在直线驱动机构和牵引机构的作用下,既可以做纵向往复运动,也可以做水平方向往复运动,即按摩者可对背部进行全方位的电磁振荡式敲打按摩或选择性地对背部任一位置进行重复按摩。将滚动按摩与电磁振荡式敲打按摩有机结合,可实现多种模式的按摩功能。
2 按摩机构的运动仿真分析
采用UG NX 10.0软件按照床体按摩机构的实际尺寸进行三维数字化设计,应用其运动仿真模块对滚动按摩的垂直升降机构及背部电磁振荡式敲打按摩的牵引机构进行了运动仿真分析,分别选取图4、图6中的A点作为标记点,其运动仿真分析结果分别如图7、图8所示。
由图7可知,波浪式滚动按摩的幅度约为10 mm,与设计的预期要求相吻合;当垂直升降机构由初始位置上升到最大值的过程中,其速度和加速度曲线都完成了一个周期变化,但其速度和加速度的变化幅值都比较小,不会对病人的身体产生冲击。将垂直升降机构和往复直线运动机构进行合理匹配,可对瘫痪病人的全身进行不同程度的滚动按摩,缓解了长期不活动所引起的肌肉萎缩等问题。

图7 垂直升降机构运动仿真分析图
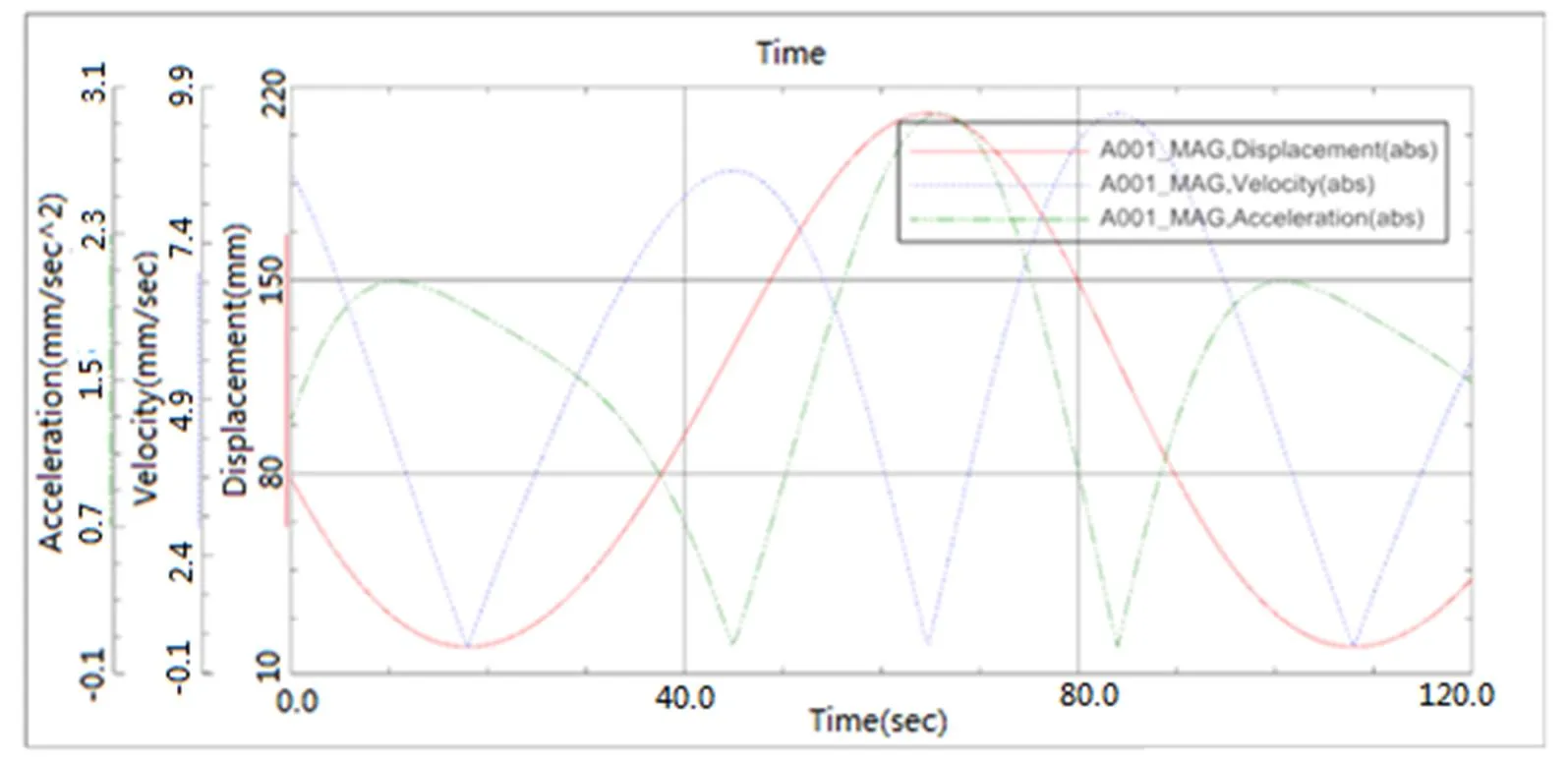
图8 牵引机构运动仿真分析图
图8为右侧按摩组件沿水平方向滑动的位移、速度和加速度随时间的变化规律,曲柄旋转180°,按摩组件沿导向杆从一侧移动到另一侧,行程约为200 mm,所需时间约为42 s;当按摩组件移动到左、右侧极限位置时,其速度均变为0 mm/s,但在由左侧向右侧滑动时的速度略大于由右侧向左侧滑移的速度;加速度在左侧极限位置时的数值明显大于右侧极限位置时的数值,且在趋近于右侧极限位置时略微减小,这均与右侧的拉簧阻力变化有关,但由于其阻力变化对速度及加速度的影响较小,不会影响其按摩效果。
事实上,在牵引机构驱动按摩组件沿导向杆进行往复水平运动过程中,按摩块在与其相连的控制器作用下,按指定的模式不断敲打病人的后背;完成一次单方向水平运动后,按摩小车按设定的距离进行纵向移动后停止(图9),按摩块再在牵引机构的水平运动过程中对背部进行电磁振荡式敲打按摩,如此反复,即可对背部进行全方位的敲打按摩;也可以让按摩小车的直线往复机构和牵引机构同时进行纵横向运动,按摩块不断变换位置进行按摩,也可让按摩小车停留在指定位置,对某一部位进行重复按摩。
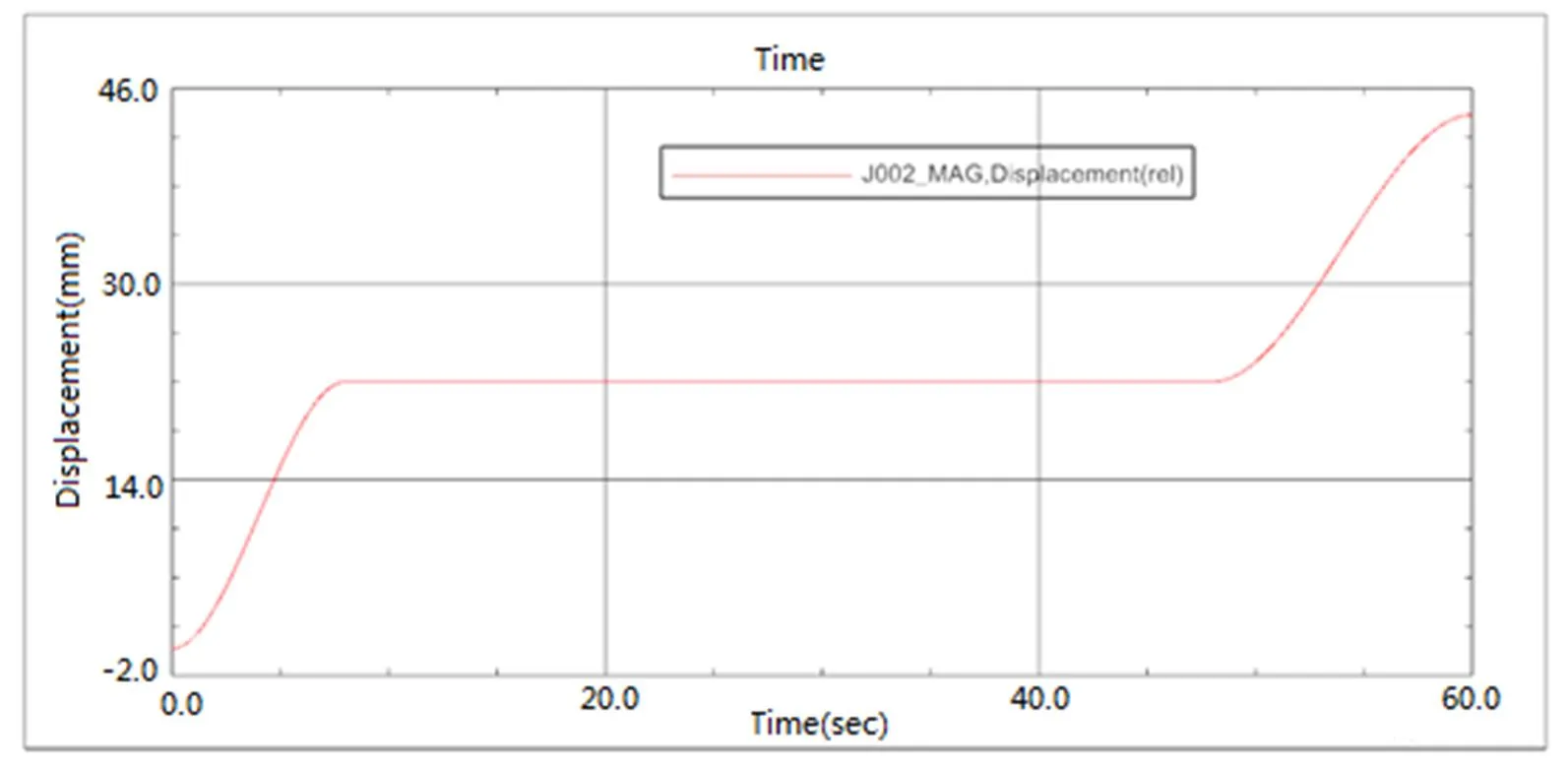
图9 直线驱动机构的间歇运动位移—时间曲线
3 结论
本文完全摈弃现有护理床的功能模块化设计思想,采用链式软床板代替铰接的刚性功能床板,将按摩功能与位姿变化及排便机构的部分功能集成在前后往复直线运动的小车上,通过对按摩装置进行合理的结构设计及分析,得出如下结论:
(1)通过控制前后按摩小车的的往复直线运动及垂直升降机构的速度、位移,可实现不同幅度及间距的全身波浪式滚动按摩。
(2)合理控制前按摩小车的往复直线运动及牵引机构的速度、位移,可对背部进行全方位的电磁振荡式敲打按摩或对某一部位进行重复按摩。
(3)经过对按摩装置进行运动仿真分析,验证了其结构设计的合理性。
[1] 蒋皆恢, 潘晓洁, 姜贤波, 等. 基于智能检测与康复的多功能护理床[J]. 中国医疗器械杂志, 2016, 40(1): 47-51.
[2] 李伟. 医养结合养老模式研究—以河南新乡为例[J]. 中国老年学杂志, 2017, 37: 2060-2063.
[3] 杨泽, 王明旭, 李建永. 基于双摇杆机构的多功能康复床的设计[J]. 机电产品开发与创新, 2017, 30(3): 26-29.
[4] 任久帅, 王继荣, 李军, 等. 多功能护理床的机构设计和运动分析[J]. 青岛大学学报: 工程技术版, 2017, 32(1): 108-110.
[5] 张建云, 陶卫军, 吴卫兵, 等. 多功能护理床结构设计研究[J]. 机电工程, 2015, 32(9):1186-1191.
[6] 于娜, 张畅. 面向个性化需求的背部按摩装置设计[J]. 机械设计, 2017, 34(1):122-125.
[7] 鲁守银, 李臣. 中医按摩机器人关键技术研究进展[J]. 山东建筑大学学报, 2017, 32(1): 60-68.
[8] 刘旭东. 一种基于气动驱动的变胞机构柔性按摩手的设计及其运动分析[J]. 机械传动, 2016, 40(12): 69-72.
[9] 张春彬. 智能翻身护理床造型设计研究[J]. 机械设计, 2014, 31(4):120-122.
[10] 李洁, 许晓云, 赵玉倩. 针对个体差异性的护理床人机工程设计研究[J]. 机械设计, 2015, 32(10):122-125.
责任编校:刘亚兵
Structural Design and Analysis of Massage Device for Multifunctional Nursing Bed
YANG Hui
(School of Mechanical & Vehicle Engineering, Changzhou Institute of Technology, Changzhou 213002, China)
The massage module could not be added to the multi-functional nursing bed due to its current functional and modular design scheme. In the light of the existing bed design’s shortcomings in the paper, original functional modular plate has taken the place of soft chain plate. Combined with the principles of ergonomics and rolling, knocking and other massage techniques, the massage trolleys with front and rear reciprocating motion have been designed to complete the rolling massage of the whole body and the electromagnetic vibration beat massage of the whole back, and its motion simulation analysis has been carried out to verify the rationality of its structural design. Moreover, the functions, such as assisting the patients to complete sitting, curved legs etc., were carried out by the massage trolleys. The difficult problems of bedsore and muscle atrophy caused by lying in bed over a long period of time have been solved by the design, which laid a solid theoretical foundation for the research and development of new multi-functional nursing bed.
massage device; motion simulation analysis; nursing bed; massage technique
10.15916/j.issn1674-3261.2017.06.011
TH132
A
1674-3261(2017)06-0391-05
2017-10-09
常州工学院科研基金项目资助(E3-6701-14-020)
杨辉(1966-),男,辽宁锦州人,高级实验师。
猜你喜欢
恋爱婚姻家庭·养生版(2023年12期)2024-01-11 02:32:46
舰船科学技术(2022年21期)2022-12-12 08:08:34
百姓生活(2021年2期)2021-05-06 15:30:58
快乐语文(2020年36期)2021-01-14 01:10:32
科学大众(2020年17期)2020-10-27 02:49:02
中学生数理化·八年级物理人教版(2019年4期)2019-05-20 10:02:36
装备制造技术(2018年10期)2018-12-24 02:24:46
文苑(2018年22期)2018-11-19 02:54:18
电子制作(2018年8期)2018-06-26 06:43:02
高中时代(2017年1期)2017-04-10 21:29:17