移动机器人的电磁谐振式无线充电技术研究*
2018-01-22 05:13:14周思吉
重庆工商大学学报(自然科学版) 2018年1期
周 思 吉
(重庆邮电大学 光电工程学院 ,重庆 400065)
随着移动机器人技术的不断发展,其已经被广泛地应用到了各个行业。尽管移动机器人的功能在不断地扩展,应用也越来越广泛,但是这一切都离不开电能对机器人功能的支持,并且随着功能的增加,电能的需求量随之增加。长期、有效的供电是机器人产业化需要解决的关键问题[1]。
目前,移动机器人都是使用高质量的机载可充电蓄电池组来给自身供电。对于机载可充电电池,当前的主要充电方式是直插式充电,由工作人员用电源插头给机器人充电,这种方式简单可行,但是需要人工操作,增加了人力成本,并且直插式充电存在易磨损、可靠性低、接触不良和具有一定的安全隐患等缺点[2]。
针对直插式充电存在的以上问题,采用一种非直插式充电技术:无线充电能量传输(Wireless Power Transmission,WPT)。该技术是以电磁场和电磁波为媒介,利用电与磁之间的变化关系,实现非接触式的能量转化和传输,主要通过电磁感应、电磁谐振、射频、微波、激光等方式实现非接触式的电力传输。与直插式充电相比,WPT使用方便、安全,无火花及触电危险,无积尘和接触损耗,无机械磨损和相应的维护问题,可适应多种恶劣环境和天气[3]。
1 无线充电技术
1.1 3种主流技术
感应式无线充电是一种基于法拉第电磁感应原理,利用原副边分离的变压器进行较近距离无线电能传输的技术[4]。目前,较成熟的无线供电方式均采用该技术,可适用于手机、笔记本电脑、电动牙刷、MP3等小功率设备。现如今,日本、德国、韩国和美国等一些国家试图将该方式用于中功率和大功率的电动汽车充电当中[5]。
微波充电技术,就是以微波(频率在300 MHz~300 GHz之间的电磁波)为载体在自由空间无线传输电磁能量的技术。该技术利用微波源将电能转变为微波,由天线发射,经长距离的传播后再由天线接收,最后经微波整流器等重新转换为电能使用。
该技术主要用于远程距离传输、航天器之间的能量传输、人造卫星和新能源的开发利用[6]。三菱重工尝试开发过基于微波WPT的电动汽车充电系统,但系统能量传输效率仅有38%[7]。
2007年,美国麻省理工学院的研究人员提出了电磁谐振式充电技术,这在当时是一项突破性技术[7]。所谓电磁谐振式无线能量传输技术,就是利用两个具有相同谐振频率的线圈,在相隔一定的距离时线圈谐振、磁场强耦合,进行能量传递。传递能量的载体是中高频磁场[8]。它是一种近场非辐射电能传输技术。与电磁感应式相比,电磁谐振式传输距离较远,且可显著提高能量的有效耦合及变压器的传输效率[9]。但是该技术传输功率较低,频率相对电磁感应式较大。
1.2 3种方式性能比较
表1列出了3种无线充电方式的性能优缺点:
机器人具有可移动性,如果采用电磁感应式充电,一旦机器人内部接收线圈和发射线圈之间的相对距离增加或者有所偏移,那么传输效率和功率会急剧下降,因此电磁感应式充电不适合移动机器人。由于激光微波对传输介质里面的生物体会产生影响,对人体有一定危害,且近距离传输效率低,所以不适合室内家用服务机器人的电能传输[10]。
电磁谐振式充电可以克服上述缺点,适当的充电距离和频率可以满足移动机器人的需求,其效率较高,对两线圈之间的相对位置变化不敏感,缺点是传输功率较低,充电时间较长,后续将通过理论研究来提高传输功率。
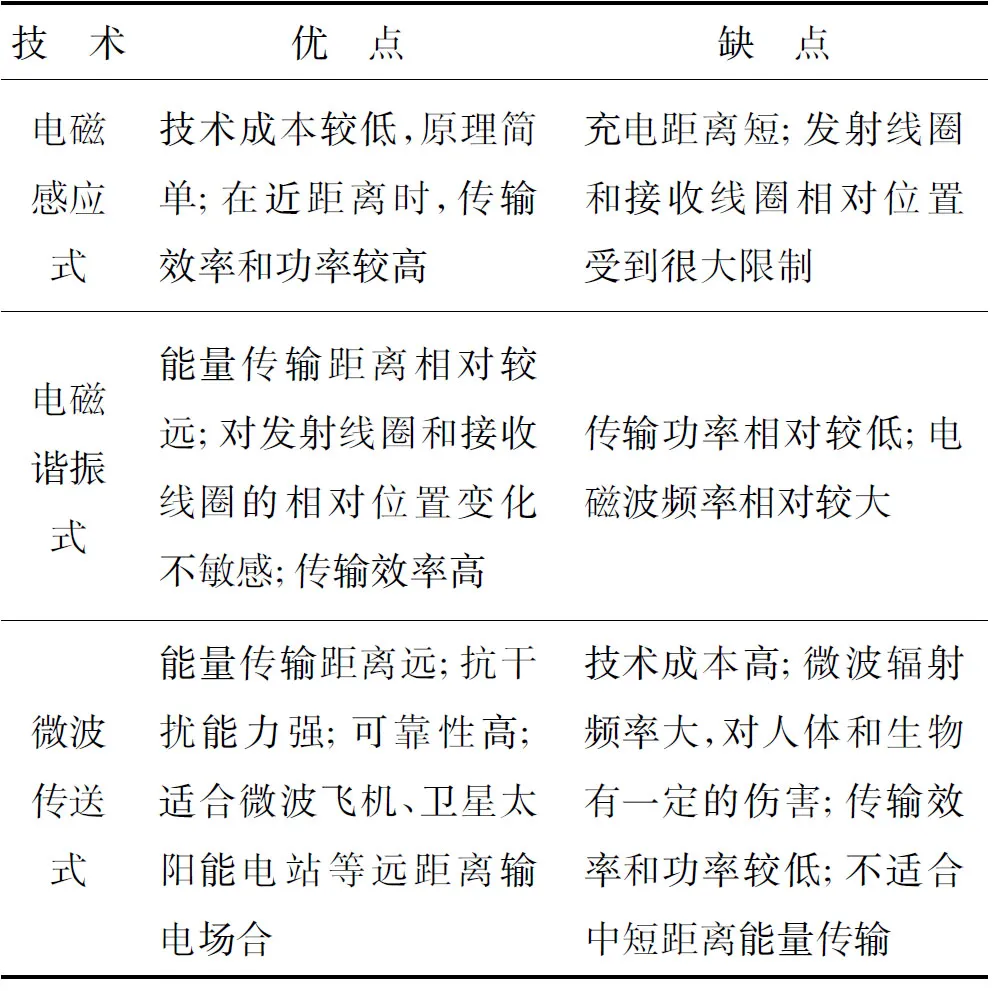
表1 3种无线充电方式性能对比Table 1 Performance comparison of threewireless charging methods
2 系统总体设计方案
该系统主要由能量发射系统、能量接收系统和信息反馈系统组成,其总体设计方案如图1所示[2,7,11]。机器人内部主要包括能量接收系统和信息反馈系统的发送部分。机器人外部的充电装置部分主要包括能量发射系统和信息反馈系统的接收部分。

图1 移动机器人无线充电总体方案结构图Fig.1 Mobile robot wireless charging general scheme structure diagram
2.1 能量发射系统
由图1所示,能量发射系统主要包括了:信号发生器、驱动电路、整流滤波电路、高频逆变电路、高频谐振电路、发射线圈。
由于工频电网输出的220 V、50 Hz的电压信号无法达到系统的谐振频率,需要先经过整流滤波电路将50 Hz的交流电转化成直流,再经过高频逆变电路将直流电压转换成满足系统谐振频率的交流电压信号,然后将该电压信号作为发射端高频谐振电路的输入,使得系统处于谐振状态,最后通过发射线圈将能量高效率地发送出去。信号发生器和驱动电路给后端的逆变电路提供具有谐振频率的开关信号。
能量发射装置可被安装在地面或者墙上,并有一些定位标志,可使移动机器人通过标识导航到充电点[12]。由于移动机器人定位寻源存在一定偏差,所以放置在地面或墙上的发射线圈尺寸要尽可能大,而机器人自身底盘直径较小,造成发射线圈、接收线圈比例失调,因此传输的效率和功率较低,可以考虑加入中继线圈来弥补。
2.2 能量接收系统
由图1所示,能量接收系统主要包括:接收线圈、高频谐振电路、整流滤波电路和充电蓄电池组。
接收线圈接收来自发射线圈的高频电磁场能量,然后通过高频谐振电路转换为电能并储存在电容中,接着通过整流滤波电路将高频电压信号转变成可为机器人搭载的蓄电池组充电的直流电压和电流信号,该部分包含在机器人内部。接收线圈可装在机器人底盘或者侧面,且尺寸应和发射线圈接近。为了减少能量的流失和其他元器件的干扰,可将能量接收系统装在一个密封性好的匣子里,并尽量远离其他高频器件。
2.3 信息反馈系统
由图1所示,信息反馈系统主要包括:检测单元、发射端和接收端微处理器以及发射端和接收端通信单元。
检测单元实时检测机器人的充电蓄电池组的充电电压和电流,检测机器人何时需要充电,将检测到的信息经过微处理器1处理之后,通过Wi- Fi等无线通信方式发送到发射端,然后经微处理器2处理之后,控制高频逆变电路的输出,从而间接控制充电电压和电流。
微处理器可选用性能较好的单片机,除了处理检测单元的数据信息之外,还需要控制移动机器人的电机驱动、寻迹模块、导航模块、语音模块、传感器等多个模块[13]。当检测单元检测到电量不足时,机器人在多个模块的配合之下自主移动到充电区域进行充电,并向发射端实时反馈充电信息。
要实现真正意义上的无线充电,能量发射系统和能量接收系统这两部分成为了关键,而高频谐振电路、发射线圈和接收线圈(耦合系统)又主要影响了系统的传输特性:输出功率和传输效率。下面通过对耦合系统进行电路建模和数学分析,对耦合系统中的参数进行分析,提高传输特性。
3 电磁谐振式耦合系统建模与传输特性因素分析
3.1 电磁谐振式耦合系统建模
电磁谐振式耦合系统的等效电路模型如图2所示[14]。需要说明的是,为方便对系统的传输性能研究,将省去电能转换部分,直接提供可输出具有谐振频率的理想交流电压源AC,将负载充电电池等效为一个纯电阻。
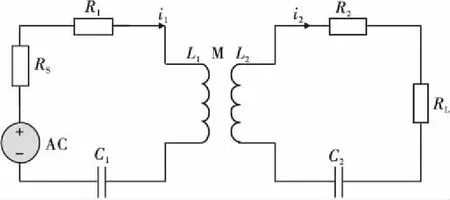
图2 电磁耦合谐振式无线充电等效电路模型图Fig.2 Equivalent circuit model diagram of electromagneticcoupling resonant wireless charging
整个电路模型由发射线圈回路和接收线圈回路组成。R1、R2分别为发射线圈和接收线圈内阻,L1、L2分别为其自感,C1、C2分别为其分布电容(补偿电容),RS为高频电压源内阻,RL为负载电阻(充电电池),i1、i2分别为发射回路和接收回路的自电流,M为发射线圈和接收线圈之间的互感。
该模型需要满足L1C1=L2C2,即发射回路的谐振频率等于接收回路的谐振频率。
Z1、Z2分别为发射回路和接收回路的自阻抗,则:
(1)
(2)
由图2所示,根据KVL回路定理,分别建立发射回路和接收回路的方程:
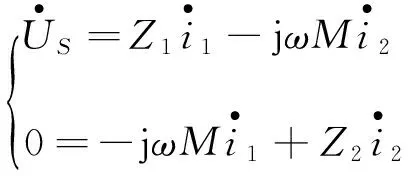
(3)
解方程组(3)得到:
(4)
因此,电源输入功率PS为
(5)
输出功率(负载消耗的功率)Pout为
(6)
根据式(5)和式(6),得出传输效率η为
(7)
对于式(1)和式(2),令
(8)
(9)
当电源频率等于发射回路的谐振频率且等于接收回路的谐振频率时,系统发生谐振,此时有:
Xi=Xo=0
(10)
即两回路的电抗部分为0,对外呈现出纯电阻状态。此时,将式(8)、式(9)、式(10)代入式(6)得:
(11)
再将式(8)、式(9)、式(10)代入式(7)得:
(12)
通过以上分析可知,当系统处于谐振状态时,两回路的电抗为0,电路呈现出纯电阻状态,阻抗模值最小,输出功率和传输效率最高;反之,当系统处于非谐振状态时,两回路阻抗模值均不是最小值,输出功率和传输效率均达不到最大值。
根据式(11)和式(12)式还可知,要想提高输出功率和传输效率,还需要减小电源内阻和两线圈的内阻,可以选取导电率较高的材料,并且适当增加线圈的横截面积。
3.2 电磁谐振式充电系统传输特性因素分析
由上述对电磁谐振式充电系统的建模和分析可知,当系统处于谐振状态,系统的传输特性最好。本小节将在系统谐振的情况下对系统的传输特性因素进行研究,现再将式(11)和式(12)式改写如下:
(11)
(12)
式(11)和式(12)即为当系统发生谐振时,输出功率和传输效率的表达式。从表达式可以看出,系统的传输特性与线圈固有谐振频率ω、互感系数M、电源有效值US、负载电阻RL和两回路自电阻Ri与Ro有关。一般情况下,负载RL是确定的。下面通过主要对ω和M进行分析,对影响系统传输特性的电路参数进行优化,找到系统的最佳传输特性。
3.2.1 线圈固有谐振频率对系统传输特性的影响
分别对式(11)和式(12)求关于线圈固有谐振频率ω的一阶导数,得:
(13)
(14)
由于电阻、互感系数以及角频率的非负性,所以式(14)恒大于等于0,系统的传输效率随着线圈固有谐振频率的增加而增加。对于式(13),令
(15)
解式(15)得极大值点角频率为
(16)
将式(16)带回式(11),得此时的最佳功率:
(17)
由式(16)可知,系统的最佳功率固有角频率与互感系数M和两回路的自电阻Ri、Ro有关。在文献[13]的基础分析之上,提出式(18):
(18)
在对系统进行设计的时候,最好满足式(18),通过实验仿真比较可知。满足式(18)的结果比不满足的结果的传输特性平均高5%~10%。一般情况下,当一个系统设计出来之后,L、M、Ri和Ro是确定的,可以改变的是分布电容(补偿电容)C,或者在图2中将分布电容C1、C2改为可变电容,以方便调试。因此,可以通过改变C的参数,使得线圈的固有谐振角频率ω0等于最佳功率角频率ωmax。
为了更加直观地进行分析,不妨令RL=1 Ω、Ri=Ro=2 Ω、M=1H、US=2 V,先代入式(16)、式(17)得到:ωmax=2rad/s、Pout max=0.25 W,再代入到式(11)、式(12)得输出功率和传输效率随线圈固有谐振频率的变化曲线,如图3所示。
实线和虚线分别代表输出功率和传输效率随线圈固有频率的变化曲线。从图3中可以看出,输出功率先随着固有频率的增加而迅速增加,当达到最佳功率固有频率时,输出功率达到最大值0.25 W,
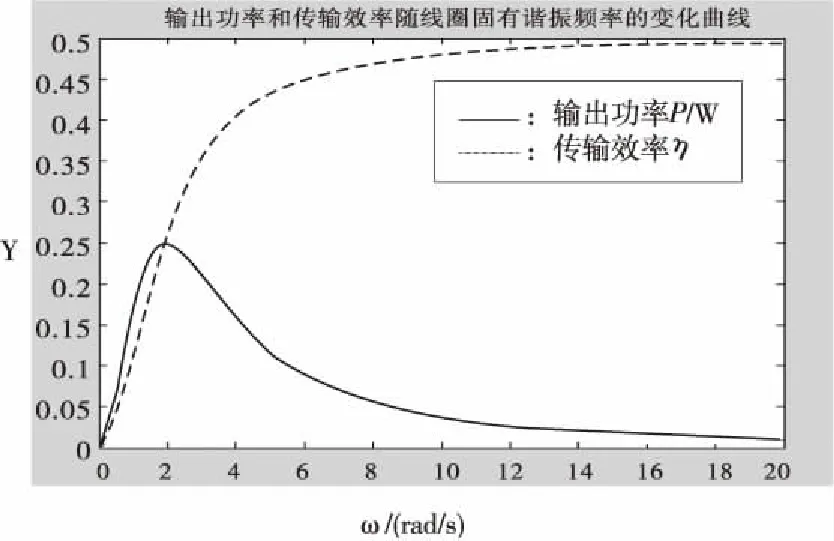
图3 输出功率和传输效率随线圈固有谐振频率变化曲线Fig.3 Variation curves of output power and transmissionefficiency with coil natural resonance frequency
然后随着固有频率的增加而缓慢减小。而传输效率则随着固有频率的增加而增加,当固有频率增加到一定值时,传输效率不再随之增加,最大效率为0.5。
综合考虑线圈固有频率对传输特性的影响:线圈固有频率不宜低于最佳输出功率谐振频率,否则系统的能量得不到充分利用;固有频率也不宜过高,否则不但达不到提高传输效率的效果,而且也无法满足负载对输出功率需求。可见不能一味地追求高谐振频率,要根据负载的要求、传输距离及高频电源的技术要求,适当地选取满足较高的输出功率与传输效率的固有频率的线圈。
3.2.2 互感系数对系统传输特性的影响
通过纯数学函数的方法,仔细观察式(11)和式(12)发现,自变量ω与M具有一定的对称性,因此输出功率和传输效率随ω的变化趋势和随M的变化趋势相似。对于式(16),将ω和M互换,得极大值点互感系数为
(19)
将式(19)代入式(11),得此时的最佳功率表达式,同式(17)。
为了更加直观地进行分析,不妨令RL=1 Ω、Ri=Ro=2 Ω、ω=1rad/s、US=2 V,先代入式(19)、式(17)得到:Mmax=2H、Pout max=0.25 W,再代入到式(11)和式(12)式得输出功率和传输效率随互感系数的变化曲线,如图4所示。
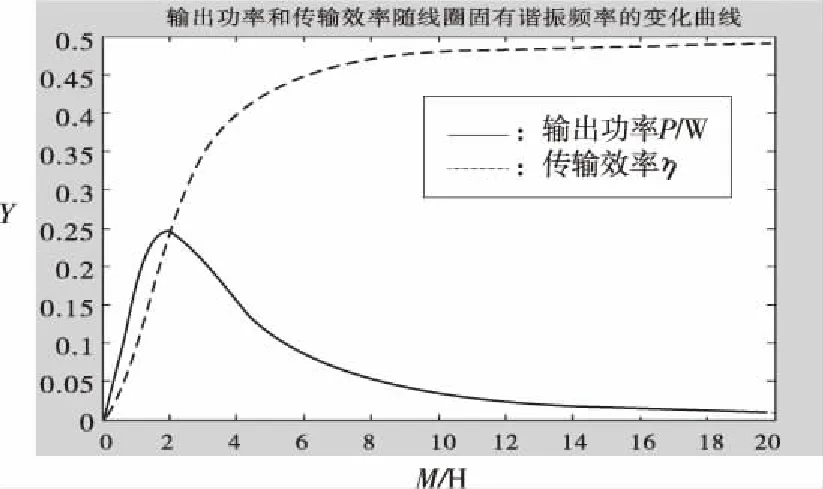
图4 输出功率和传输效率随互感系数的变化曲线Fig.4 Variation curves of output power and transmissionefficiency with mutual inductance
图4和图3相似。由式(19)可知,系统的最佳功率互感系数与两回路的自电阻Ri、Ro和线圈固有谐振频率ω有关。一般情况下,Ri和Ro是不变的。在实际设计中,应尽量满足两线圈互感系数等于最佳功率互感系数的条件。在文献[13]的基础分析之上,提出具体满足这一条件的方法:如果ω确定,则最佳功率互感系数Mmax确定,可以通过改变两线圈之间的距离和相对位置来调节实际系统的互感系数M0,使得M0=Mmax;如果两线圈已经固定,则可以通过改变补偿电容的值来调节ω,从而间接调节Mmax,使得Mmax=M0。
3.3 实验仿真
实验仿真和分析软件为Multisim,这是一款具有强大仿真能力的软件,可适用于高校教学,也可适用于专业电子工程师的设计和仿真。仿真电路如图5所示。
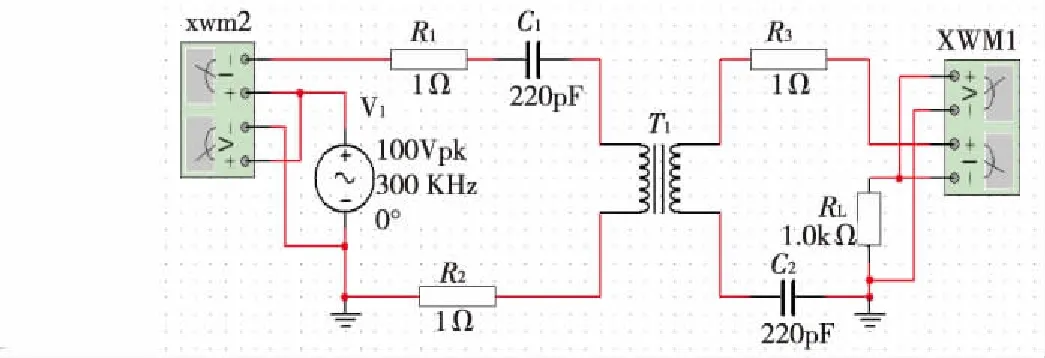
图5 实验仿真电路图Fig.5 Experimental simulation circuit diagram
两个功率表分别接在电源和负载两端,用来测量输入和输出功率。交流电源的频率和耦合系数可调。通过改变交流电源频率和耦合系数的值,并观察两个功率表的数值,可以得到不同频率和耦合系数所对应的输出功率和传输效率,如表2和表3所示。
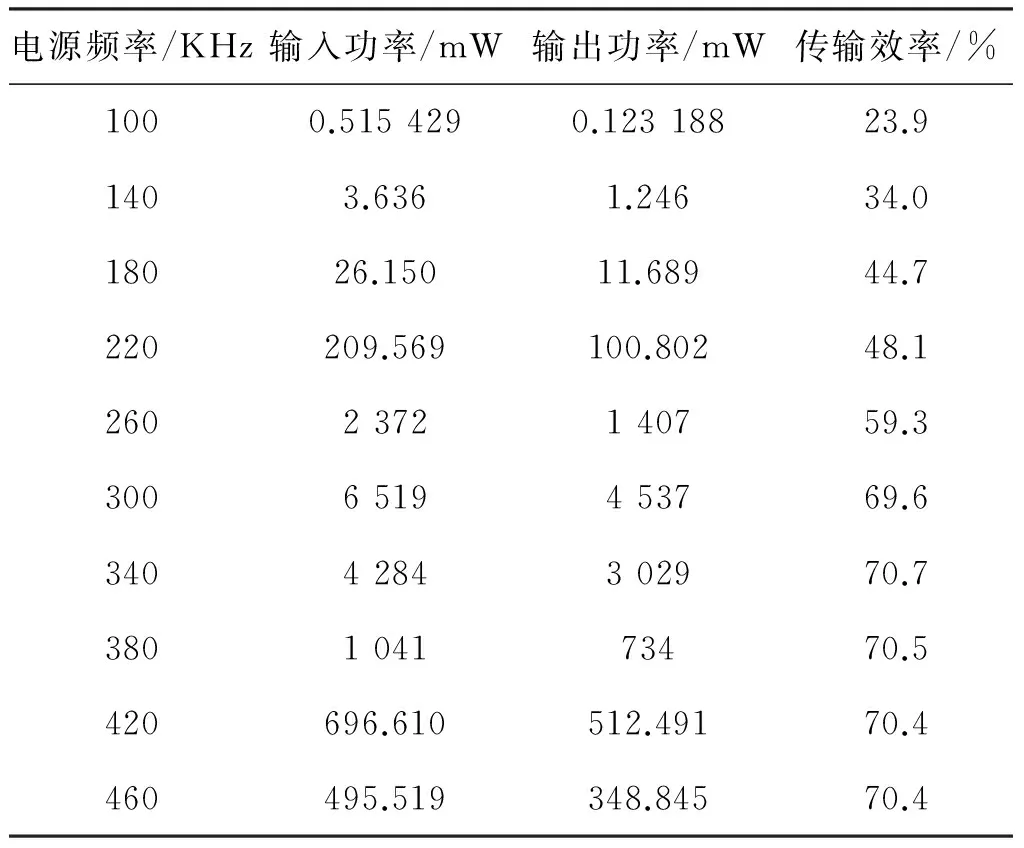
表2 不同电源频率所对应的传输特性Table 2 Different power frequencies correspondingto transmission characteristics
表2从100 kHz开始,以40 kHz为间隔进行了10组功率值采样。从表2可以看出,随着频率的增加,输出功率先增加后减少,而传输效率则逐渐增加,最终稳定在70.4%,线圈谐振频率约为300 kHz,与前面分析一致。
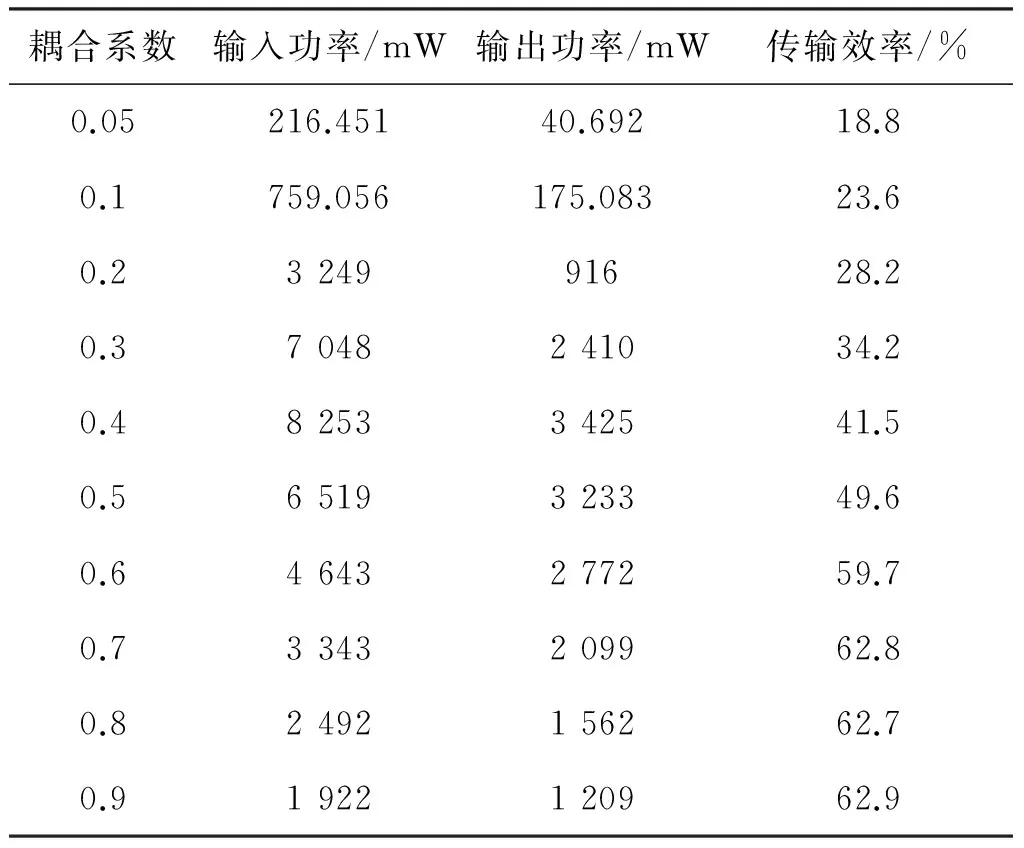
表3 不同耦合系数所对应的传输特性Table 3 Different coupling coefficients correspondingto transmission characteristics
从表3可以看出,随着两线圈之间耦合系数的增加,输出功率先增加后减少,而传输效率则逐渐增加,最终稳定在62.9%,最佳功率耦合系数在0.4附近。由于互感系数与耦合系数之间存在正比例关系,所以表3也可以表示不同的互感系数所对应的传输特性,与前面分析一致。
最后需要说明的是,模型建立在理想情况下,实际电路和结构是复杂的,影响系统的传输特性因素比本节叙述得要多,但是本节在理想情况下所得出的结论,仍然适用于实际的应用,仍然可以为实际的应用提供指导和帮助。
4 结束语
电磁谐振式无线充电技术可以适用于移动机器人。然而,现如今基于这项技术的研究偏向于理论化,缺乏一个可以实际应用的研究成果,而且这项技术的传输功率较小,暂时不能在规定的时间内完成为机器人充电的任务,也存在着能量损失较高等缺陷,而且机器人内部存在大量的抗干扰性弱的电子元器件,在如何克服干扰源的影响、是否存在有害电磁辐射等问题上还有待做出进一步研究。如何实现该技术的高效化、大型化以及距离化,是每个国家的科研工作者需要共同研究和探讨的焦点。
[1] 黎阳生.变电站巡检机器人自主充电装置及对接控制研究[D].重庆:重庆大学,2013
LI Y S.Study on Auto-recharging Device and Docking Control for Substation Inspection Robot[D].Chongqing:Chongqing University,2013
[2] 李坤.应用于AGV的无线充电技术研究[D].哈尔滨:哈尔滨工业大学,2012
LI K.Research on Wireless Charging Technology for AGV[D].Harbin:Harbin Institute of Technology,2013
[3] 曹玲玲,陈乾宏,任小永,等.电动汽车高效率无线充电技术的研究进展[J].电工技术学报,2012,27(8):1-13
CAO L L,CHEN Q H,REN X Y,et al.Review of the Efficient Wireless Power Transmission Technique for Electric Vehicles[J].Transactions of China Electrotechnical Society,2012,27(8):1-13
[4] 刘刚,郑青玉,王德钊.一种基于电磁感应的无线充电方法[J].北京信息科技大学学报(自然科学版),2013,28(2):51-54
LIU G,ZHENG Q Y,WANG D Z.An Electromagnetic Induction Based Wireless Charging Method[J].Journal of Beijing Information Science and Technology University(Natural Science Edition),2013,28(2):51-54
[5] LEI W,XIONG X Y,WANG W.Car Wireless Charging Device[J].Applied Mechanics & Materials,2016,602-605:1060-1063
[6] 李斌,刘畅,陈企楚,等.电动汽车无线充电技术[J].江苏电机工程,2013,32(1):81-84
LI B,LIU C,CHENG Q C,et al.Wireless Charging Technology for Electric Vehicles[J].Jiangsu Electrical Engineering,2013,32(1):81-84
[7] 熊炜,黎安铭,任乔林,等.无线充电装置在电动汽车上的应用研究综述[J].通信电源技术,2016,33(3):26-28
XIONG W,LI A M,REN Q L,et al.Review on Application of Wireless Charging Device on Electric Vehicles[J].Telecom Power Technology,2016,33(3):26-28
[8] 宋凯,朱春波,李阳,等.基于磁耦合谐振的自主无线充电机器人系统设计[J].电工技术学报,2014,29(9):38-43
SONG K,ZHU C B,LI Y,et al.Design and Implementation of an Autonomous Wireless Charging Robot System Using Magnetically Coupled Resonance[J].Transactions of China Electrotechnical Society,2014,29(9):38-43
[9] 朱云阳,郝鹏,刘维亭.基于电磁谐振式无线充电线圈实验研究[J].信息技术,2015(8):113-116
ZHU Y Y,HE P,LIU W T.The Experimental Study on Coils Based on Electromagnetic Resonance Wireless Power Transfer[J].Information Technology,2015(8):113-116
[10] 戚新毅.家庭服务机器人的自主充电技术[D].大连:大连理工大学,2015
QI X Y.Self-charging Technology for Home Service Robot[D].Dalian:Dalian University of Technology,2015
[11] 宋帅孝.电磁耦合谐振无线输电技术研究[D].成都:西南交通大学,2016
SONG S X.Electromagnetic Coupling Resonators in Wireless Transmission Technology[D].Chengdu:South-west Jiaotong University,2016
[12] 程康.基于视觉的自充电移动机器人目标定位算法研究[D].哈尔滨:哈尔滨工程大学,2008
CHENG K.Study of Object Location Algorithm for Automatic Charging Mobile Robot Base on Vision[D].Harbin:Harbin Engineering University,2008
[13] 洪草根.基于AVR单片机的移动机器人控制系统设计[D].北京:华北电力大学,2011
HONG C G.Design of Control System for Mobile Robot Based on AVR Microcontroller[D].Beijing:North China Electric Power University,2011
[14] 丁卫东.大功率电磁谐振式无线能量传输[D].成都:电子科技大学,2015
DING W D.Research on High Power Wireless Power Transfer[D].Chengdu:University of Electronic Science and Technology of China,2015
猜你喜欢
大电机技术(2022年4期)2022-08-30 01:38:30
中国特种设备安全(2021年5期)2021-11-06 05:09:26
成都信息工程大学学报(2020年5期)2020-07-29 08:50:12
模具制造(2019年7期)2019-09-25 07:29:58
西南交通大学学报(2016年3期)2016-06-15 20:29:35
通信电源技术(2016年4期)2016-04-04 02:57:38
电测与仪表(2015年21期)2015-04-09 11:52:16
电测与仪表(2015年11期)2015-04-09 11:46:14
汽车维护与修理(2015年6期)2015-02-28 12:17:05
燕山大学学报(2014年2期)2014-03-11 15:28:26