基于粒子群算法的主动悬架混合控制策略研究
2018-01-19 11:22吴慰春丁仁凯
机械设计与制造 2018年1期
吴慰春,陈 龙,丁仁凯
(1.盐城工学院 机械工程学院,江苏 盐城 224051;2.江苏大学 汽车工程研究院,江苏 镇江 212013)
1 引言
主动悬架的发展克服了传统被动悬架无法同时兼顾车辆乘坐舒适性、行驶平顺性及安全性的缺点,可根据不同行驶工况产生相应的作动力,满足车辆不同性能要求[1-3]。其中,控制策略是主动悬架的控制核心,不同的控制策略会产生不同的控制效果[4]。而与线性最优控制[5]、预见控制[6]、自适应控制[7]、模糊控制[8]、神经网络控制[9]等控制策略相比,天棚/地棚控制方式简单、易于实施且可靠性高,是目前应用最为广泛的主动悬架控制策略。但天棚控制会使得车辆的行驶平顺性及安全性恶化,地棚控制会使得车辆的乘坐舒适性恶化。鉴于此,提出了一种混合控制策略,基于粒子群算法优化控制参数,实现车辆乘坐舒适性、行驶平顺性及安全性的有效协调。
2 混合控制策略
天棚控制策略可有效改善车辆的乘坐舒适性,地棚控制策略可有效改善车辆的行驶平顺性及安全性,其理论模型,如图1所示。需要指出的是,理论模型的实现需要固定参考系,但车辆行驶过程中不具备该条件。为此,主动悬架系统通过引入作动器很好地解决了该问题,其原理是通过控制作动器输出作动力,从而跟踪理想的天棚/地棚控制力。实际天棚/地棚控制,如图2所示。根据图2,得到主动悬架线性二自由度动力学模型为:

其中,进行天棚控制时,

进行地棚控制时,

式中:csky—天棚阻尼系数;cground—地棚阻尼系数。
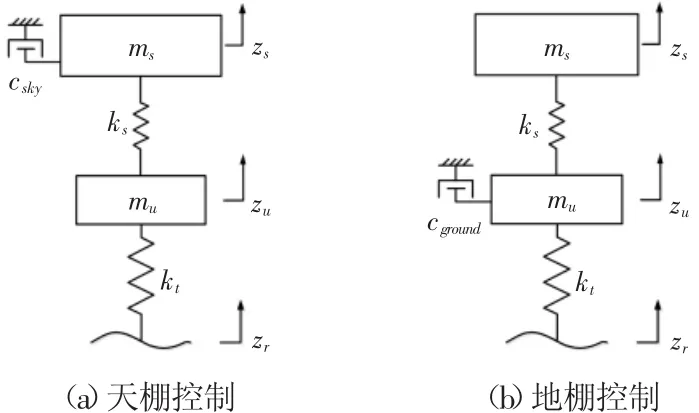
图1 理论模型Fig.1 Theoretical Model
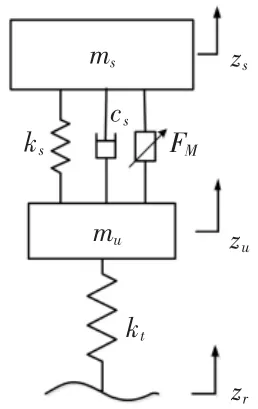
图2 实际模型Fig.2 Practical Model
为充分说明天棚/地棚控制策略的控制特点及其控制效果,以传统被动悬架为比较对象,以车身加速度增益、悬架动挠度增益以及车轮相对动载荷增益为评价指标,进行频域内的仿真分析。仿真参数,如表1所示。

表1 仿真参数Tab.1 Simulation Parameters
天棚控制策略下主动悬架与被动悬架的仿真对比结果,如图3所示。从图3中可以看出,与传统被动悬架相比,天棚控制策略避免了悬架系统的低频共振。乘坐舒适性方面,天棚控制策略有效降低了低频及高频共振区之间的车身加速度增益;行驶平顺性方面,在(0.1~0.5)Hz之间,悬架动挠度增益有所增大,(0.5~5)Hz之间情况相反;行驶安全性方面,在(0.1~5)Hz之间,车轮相对动载荷增益明显减小。由此可以看出,天棚控制策略可有效改善车辆在低频区(1~5)Hz的动力学性能(乘坐舒适性、行驶平顺性及安全性),但高频共振区,乘坐舒适性有所恶化,高频共振及高频区,行驶平顺性及安全性明显恶化。这主要是因为在高频共振及高频区,主要是车轮振动,而天棚控制策略主要用于抑制车身振动。因此,天棚控制策略无法兼顾高频区的行驶平顺性及安全性。地棚控制策略下主动悬架与被动悬架的仿真对比结果,如图4所示。从图4中可以看出,与传统被动悬架相比,地棚控制策略避免了悬架系统的高频共振。乘坐舒适性方面,地棚控制策略下的车身加速度增益在全频域都有所恶化,而行驶平顺性及安全性主要是在低频共振及低频区有所恶化,其原因主要是因为在低频共振及低频区,主要是车身振动,而地棚控制策略主要用于抑制车轮振动。因此,地棚控制策略无法兼顾全频域内的乘坐舒适性以及低频区的行驶平顺性和安全性。
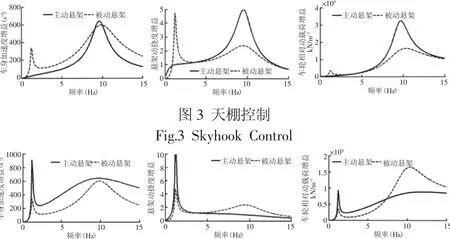
图4 地棚控制Fig.4 Groundhook Control
综上所述,天棚/地棚控制策略无法同时兼顾车辆的乘坐舒适性、行驶平顺性及安全性。为此,提出了一种混合控制策略,即同时结合天棚和地棚控制策略,通过选取适当的控制参数,实现乘坐舒适性、行驶平顺性及安全性的有效协调。混合控制策略下的主动悬架输出作动力为:

3 控制参数的确定
天棚阻尼系数csky和地棚阻尼系数cground是混合控制策略最主要的控制参数,如何选取适当的值以获得最优的控制效果是研究重点。为此,以粒子群算法为优化手段,进行控制参数寻优。
粒子的位置和速度更新公式可表示为[11]:

优化过程中,以车身加速度作为目标函数,并建立相应的约束条件,参数寻优的数学模型表示为:
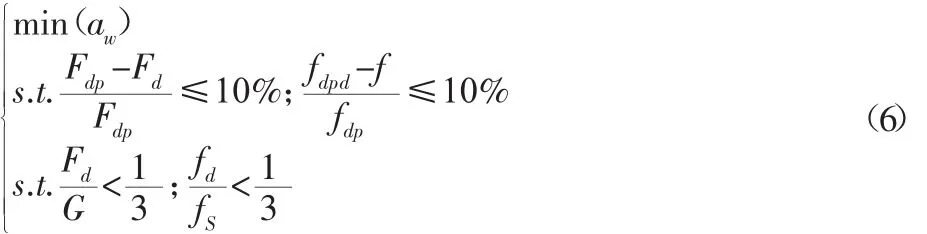
式中:Fd和fd—主动悬架车轮动载荷和悬架动挠度的均方根值;Fdp和fdp—被动悬架轮车轮;G—装配主动悬架车辆的静载质量;fs—静挠度。
载荷和悬架动挠度的均方根值。参数寻优的基本原则为:主动悬架车轮动载荷和悬架动挠度的均方根值分别不超过静载荷和静挠度的1/3,同时,尽可能提高乘坐舒适性,并使得主动悬架的车轮动载荷和悬架动挠度相比被动悬架分别提高10%。设定种群规模为10,迭代次数为k=2000,粒子群搜索空间维度设为2,分别表示csky和cground,惯性权重为0.9,学习因子均为2。初始位置、k=300、k=600以及k=1000时的粒子最优位置,如图5所示。从图5中可以看出,随着迭代次数的增加,粒子逐渐向(8000,500)的位置靠近,当k=2000时,粒子的最优位置为(8119,529),即控制参数csky和cground的最优值分别为8119和529。粒子最优位置,如图5所示。
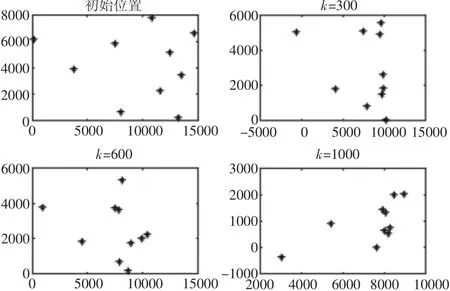
图5 粒子最优位置Fig.5 Best Position of Particle
4 动力学性能仿真对比
获取混合控制策略最优控制参数后,分别进行天棚控制、地棚控制以及混合控制的动力学性能对比。从图6中可以看出,混合控制的车身加速度增益和车轮相对动载荷增益在全频域内要远低于地棚控制,在高频共振及高频区要远低于天棚控制;而悬架动挠度增益在低频共振及低频区要远低于地棚控制,在高频共振及高频区要远低于地棚控制。由此说明,混合控制策略改善了天棚/地棚控制策略的不足。
同样以传统被动悬架为比较对象,从图7中可以看出,采用混合控制策略的主动悬架在全频域内的车身加速度增益和悬架动挠度增益都要低于传统被动悬架,特别是在低频共振和高频共振区,即车辆的乘坐舒适性和行驶平顺性得到了明显改善。而在行驶安全性方面,除在(2~5)Hz区间内略有所恶化外,其它区间的车轮相对动载荷增益都要远低于传统被动悬架。由此说明,采用混合控制策略的主动悬架可同时兼顾车辆的乘坐舒适性、行驶平顺性及安全性。

图7 被动悬架与主动悬架频域对比Fig.7 Comparison between Passive Suspension and Active Suspension in Frequency Domain
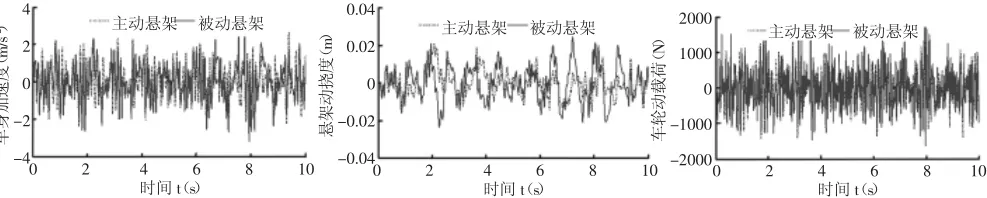
图8 被动悬架与主动悬架时域对比Fig.8 Comparison between Passive Suspension and Active Suspension in Time Domain
为进一步验证上述结论的正确性,进行了混合控制策略下主动悬架与传统被动悬架时域内的仿真分析,如图8所示。控制策略下主动悬架的车身加速度、悬架动挠度和车轮动载荷都要优于传统被动悬架,其均方根值。如表2所示。
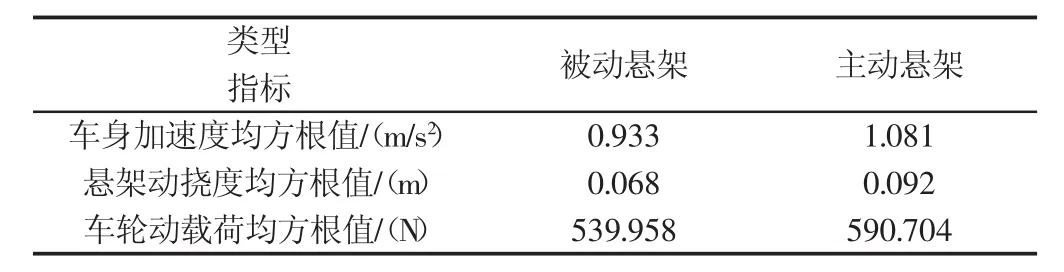
表2 被动悬架与主动悬架性能对比Tab.2 Performance Comparison between Passive Suspension and Active Suspension
从表中可以看出,相比被动悬架,采用混合控制策略的主动悬架,车身加速度均方根值减小了13.96%,悬架动挠度均方根值减小了26.01%,车轮动载荷均方根值减小了8.59%。由此说明,时域内的仿真结果与频域内的仿真结果是一致的,即采用混合控制策略的主动悬架可有效提高系统动力学性能(乘坐舒适性、行驶平顺性及安全性)。同时说明,采用粒子群算法进行了混合控制策略控制参数寻优结果是正确的。
5 结论
以主动悬架为研究对象,研究了混合控制策略对车辆动力学性能的控制效果,主要研究结论如下:(1)天棚/地棚控制策略无法兼顾车辆的乘坐舒适性、行驶平顺性及安全性;天棚控制策略在高频区的控制效果不及传统被动悬架,而地棚控制策略在低频区的控制效果有所恶化;(2)提出了混合控制策略,以粒子群算法进行了混合控制略控制参数寻优,分别确定了天棚阻尼系数和地棚阻尼系数为csky=8119Ns/m,cground=529 Ns/m;(3)混合控制策略克服了天棚/地棚控制策略的不足,相比传统被动悬架,车身加速度均方根值减小了13.96%,悬架动挠度均方根值减小了26.01%,车轮动载荷均方根值减小了8.59%,说明混合控制策略可有效提高车辆的动力学性能,同时说明采用粒子群算法进行了混合控制策略控制参数寻优结果是正确的。
[1]施德华,陈龙,汪若尘.半主动悬架馈能器设计及其馈能特性研究[J].机械设计与制造,2014(11):126-130.(Shi De-hua,Chen Long,Wang Ruo-chen.Study on design and energyregenerative performance of regenerator for semi-active suspension[J].Machinery Design & Manufacture,2014(11):126-130.)
[2]秦也辰,管继富,顾亮.主动悬架系统建模及力跟踪控制[J].北京理工大学学报,2014,34(7):666-669.(Qin Ye-chen,Guan Ji-fu,Gu Liang.Modeling and force tracking control for active suspension system[J].Transactions of Beijing Institute of Technology,2014,34(7):666-669.)
[3]张勇超.车辆电磁主动悬架鲁棒控制研究[D].上海:上海交通大学,2012.(Zhang Yong-chao.Study on robust control for vehicle active electromagnetic suspension[D].Shanghai:Shanghai Jiaotong University,2012.)
[4]支龙.汽车主动悬架智能控制策略研究[D].武汉:华中科技大学,2011.(Zhi Long.Research on intelligent control strategy for automotive activesuspension[D].Wuhan:Huazhong University of Science&Technology,2011.)
[5]陈士安,邱峰,何仁.一种确定车辆悬架LQG控制加权系数的方法[J].振动与冲击,2008,27(2):65-68 转 176.(Chen Shi-an,Qiu Feng,He Ren.A method for choosing weights in a suspension LQG control[J].Journal of Vibration and Shock,2008,27(2):65-68/176.)
[6]何将三,李艳.汽车主动悬架的最优预见控制[J].汽车工程,1999,21(6):333-337.(He Jiang-san,Li Yan.Optional preview control for automotive active suspension[J].Automotive Engineering,1999,21(6):333-337.)
[7]孙建民,王芝秋,张新玉.车辆主动悬架系统的LMS自适应控制[J].汽车工程,2003,25(4):360-363.(Sun Jian-min,Wang Zhi-qiu,Zhang Xin-yu.LMS adaptive control of vehicle active suspension system [J].Automotive Engineering,2003,25(4):360-363.)
[8]管继富,武云鹏,黄华.车辆半主动悬架的模糊控制[J].系统仿真学报,2007,19(5):1030-1033.(Guan Ji-fu,Wu Yun-peng,Huang Hua.The fuzzy control for the semiactive suspension vehicle[J].Journal of System Simulation,2007,19(5):1030-1033.)
[9]王辉.车辆半主动悬架神经网络自适应控制的研究[D].南京:南京农业大学,2004.(Wang Hui.Study of neural network self-adapt control for vehicle of semiactive suspension[D].Nanjing:Nanjing Agricultural University,2004.)
[10]陈杰平,陈无畏,祝辉.基于Matlab/Simulink的随机路面建模与不平度仿真[J].农业机械学报,2010,41(3):11-15.(Chen Jie-ping,Chen Wu-wei,Zhu Hui.Modeling and simulation on stochastic road surface irregularity based on matlab/simulink[J].Transactions of the Chinese Society for Agricultural Machinery,2010,41(3):11-15.)
[11]张武,陈建,高煜.基于粒子群优化的发动机悬置系统稳健优化设计[J].农业机械学报,2010,41(5):30-35.(Zhang Wu,Chen Jian,Gao Yu.Robust optimal design of an engine mounting system based on particle swarm optimization[J].Transactions of the Chinese Society for Agricultural Machinery,2010,41(5):30-35.)
猜你喜欢
现代仪器与医疗(2021年2期)2021-07-21
装备制造技术(2020年2期)2020-12-14
装饰装修天地(2020年10期)2020-07-04
今日农业(2019年12期)2019-08-15
建筑热能通风空调(2018年5期)2018-07-09
中国照明(2016年5期)2016-06-15
消费者报道(2016年3期)2016-02-28
汽车零部件(2014年6期)2014-09-20
振动、测试与诊断(2014年6期)2014-03-01
汽车与新动力(2012年5期)2012-03-25