一种新的基于LPMD的散射路径识别算法
2018-01-18 03:21:22邓水发
西南交通大学学报 2018年1期
邓 平,芮 洋,邓水发
(西南交通大学信息科学与技术学院,四川成都610097)
在地面无线定位中,因为无线信号传输的固有特性,诸如多径传输、路径损耗、信号间干扰、阴影衰落和非视距传输等因素的影响,都容易导致定位结果偏离真实值.其中,非视距传输是定位误差的主要来源[1-2].为了在这样的环境中对被测目标进行精确定位,人们研究了很多非视距环境下的定位算法.
其中,基于散射体信息的定位算法,根据研究的方式和方法,主要分为两类:一类就是根据散射体建模,并根据接收信号的统计特征来建立一个数学模型,通过将接收到的信号带入数学模型中进行定位[3-6];另一类就是根据散射体的几何位置来定位的方法,由于其思路在于把NLOS(non-line-ofsight)误差转化为确定性的物理模型因素,使定位精度主要取决于定位参数的测量精度,和NLOS引起的参数偏差无关,这为实现高精度定位提供了可能,近年来受到了大量的研究和关注[7-12].
根据统计特征来建模的方法,将所有的视距信号和非视距信号都作为统计信号来处理,并不单独考虑散射信号是单次散射还是多次散射.以上利用散射体的几何位置信息来定位的算法中,绝大部分都没有考虑多次散射路径信号,或者直接假设所有的散射信号都是单次散射路径信号[13-14],而在非视距干扰严重的环境下,多次散射路径信号的增加会大大降低这些算法的性能.
为了解决散射路径识别的问题,文献[7]提出一种基于LPMD(line-of-possible-mobiledevice)的算法来识别散射信号中的单次散射信号和多次散射信号.该方法先计算各LPMD的到达时间(time-of-arrival,TOA)权值,并通过设定一个门限来筛选一部分权值较小的LPMD,再计算筛选出来的这部分LPMD的几何中心作为参考点的坐标,然后以参考点到各LPMD中点的距离来构造判决计算式.该方法除了最后的散射路径判决外,还多了一次LPMD的TOA权值判决,不仅为参考点的计算带来误差,还没能充分利用所有LPMD的几何信息.而且,直接以各LPMD的几何中心作为参考点的坐标,会使参考点到真实目标之间存在较大的偏差,尤其是当被测目标处于侦测站围成的区域外侧时,这个距离偏差会更大,从而严重影响到最后路径判决的准确度.例如,在边境线、特殊山谷环境和战场环境中,一方面是侦测站选址的限制,一方面是被测目标本身的特性,决定了被测目标基本只会在侦测站围成的区域外侧活动,而这种特殊场景也很少有文献考虑,但其本身依旧具有很大的研究价值,且在近些年来,也鲜有基于LPMD的散射路径识别这类算法的进一步研究.
为此,本文提出了一种新的基于LPMD的识别算法,考虑到普通环境和特殊环境下不同的LPMD的分布特点,以所有LPMD的交点来计算初步参考点位置,并通过对所有交点中,距离初步参考点较远的一部分交点,对剩余的较近的点做负期望补偿来修正参考点的位置.同时使用参考点到各LPMD的直线距离来构造判决计算式.相比文献[7]算法大大优化了参考点的计算准确度,减少了额外的判决次数,无论当被测目标处于侦测站围成区域的内侧或外侧时,都有更优良的散射路径识别性能.
1 LPMD概念
如图1所示,图中:B是侦测站;Dm是被测目标;S是侦测站B接收到的散射信号路径经过的散射点;φ是信号出射角;θ是信号到达角.
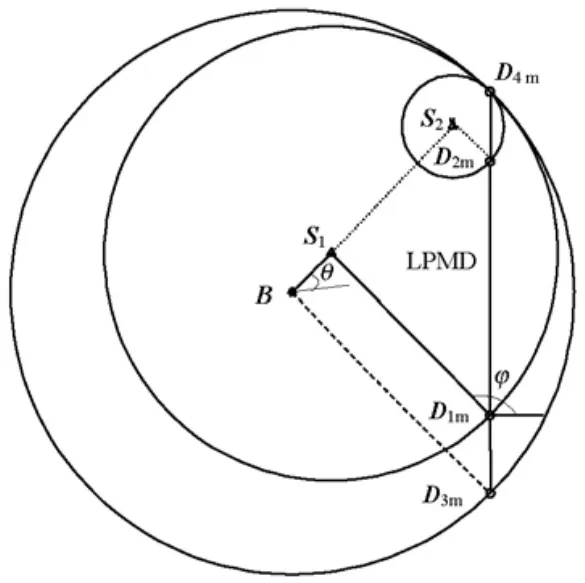
图1 LPMD示意图Fig.1 Sketch map for LPMD
侦测站B在测得接收信号的TOA值和AOA(angle-of-arrival)值后,以TOA测量值的距离为半径画一个大圆,如果目标Dm到侦测站之间是视距传播,则Dm应该在大圆上的一点,此时信号出射角φ和到达角θ应该互补;当然,在非视距环境下,目标到侦测站之间存在NLOS传播,信号经过S的散射之后再到达B,此时,由于信号经过散射的原因,信号出射角φ和到达角θ一般不满足互补.
在NLOS传播情况下,散射体的位置应该在以侦测站B为起点,以信号到达角θ为幅角,幅长小于等于TOA距离的一条线段上;而被测目标Dm在以散射体为圆心的圆上,再加上信号出射角的约束,就可以得到相应的被测目标Dm的位置.
这里讨论的散射信号是单次散射的情况.由图1可以看出,在B看来,S的位置是不固定的,有可能在信号到达角θ这条线段上的任一点,从而Dm的位置也是不固定的,但是B到S的距离dB,S,再加上S到Dm的距离dS,Dm,这个总距离dTOA是固定的.根据式(1)的几何关系
可以在图1中得到Dm所有可能的位置,从而可以发现Dm可能所处的位置是一条线段,这条线段称为Dm的可能位置线,即图1中的LPMD.
2 基于LPMD的识别算法
以上是假设侦测站接收到的信号是单次散射信号,如果考虑到接收到的散射信号中含多次散射信号,由于多次散射信号的TOA值更大,所以其对应的LPMD距离真实目标点更远,从而和单次散射信号的LPMD区分开,如图2所示.
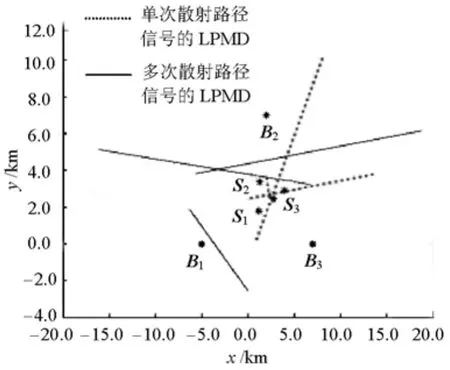
图 2多侦测站LPMD示意Fig.2 Sketch map for LPMDs in multiple stations
图2 中,假设有3个侦测站,真实目标点的坐标为(2.5,2.5)km,在真实目标点周围按照圆环散射模型[15],半径为1.0 km,随机设了 3个散射点,即图2中的S1、S2、S3,分布在真实目标点的周围,且被测目标的位置在3个侦测站所围成的区域中.目标发射出的信号,一部分经过3个散射体单次散射后被各个侦测站接收,形成单次散射路径;另一部分通过2个或3个散射体的连续多次散射后再被各个侦测站接收,形成多次散射路径.然后依次对各个侦测站按第1节中描述的方法,绘制其对应的LPMD.图2中只画出了部分的单次散射信号的LPMD和部分的多次散射信号的LPMD.从图2可以看出,单次散射路径信号的LPMD相交于真实目标点附近.
对于散射路径的识别,文献[7]中算法分为2个步骤:
步骤1 首先根据各侦测站接收到的散射信号,在坐标轴上得到全部散射信号对应的LPMD图,然后计算其中每条LPMD线的权重,用以计算参考点C,TOA距离越大的权重越小,TOA距离越小的权重越大,计算过程为
式中:ωj,m为该路径信号对应的权值;M为第j个侦测站的散射信号总数;N为侦测站总数;tj,m为第j个侦测站接收到的第m个散射信号的TOA测量值.
式中:wj,m是第j个侦测站接收到的第m个散射信号对应的权重.
然后设置一个权重门限w,文献[7]中给出的建议值为0.1,只有大于这个门限的LPMD才会被用来计算参考点C,如式(4).
式中:MMidPoint为每条 LPMD的中点坐标;Ls为LPMD总数.
步骤2 得到C的坐标之后,再计算MMidPoint到C的距离权重,文献[7]中以各LPMD的中点到C的距离来构造判决计算式,如式(5).
式中:δj,m为第j个侦测站的第m条LPMD到 C的距离权值;dj,m为其对应的距离权重.
这里同样设置一个权重门限d,文献[7]中给出的推荐值是0.2,大于这个门限的LPMD对应的信号路径被判定为多次散射路径,而小于这个门限的LPMD对应的信号路径被判定为单次散射路径,即

图2中,C即是按式(4)计算的参考点,通过观察可以看出,C到单次散射路径信号的LPMD中点的距离相比到多次散射路径信号的LPMD的距离要短,从而实现对散射路径的识别.
3 本文基于LPMD的识别算法
文献[7]的算法中,总共进行了2次门限判决,而每次判决势必都有误差存在;其次,按文献[7]算法计算的 C,其实是各 LPMD的几何中心,其位置与实际目标点差距较大,会给算法的识别性能带来不利影响;文献[7]算法是针对目标处于侦测站所围成的区域内侧这种情形提出的,并没有考虑目标处于区域外侧的情形.本文中考虑两种情况,(1)普通场景:被测目标处于侦测站围成的区域内侧;(2)特殊场景:被测目标处于侦测站围成的区域外侧.
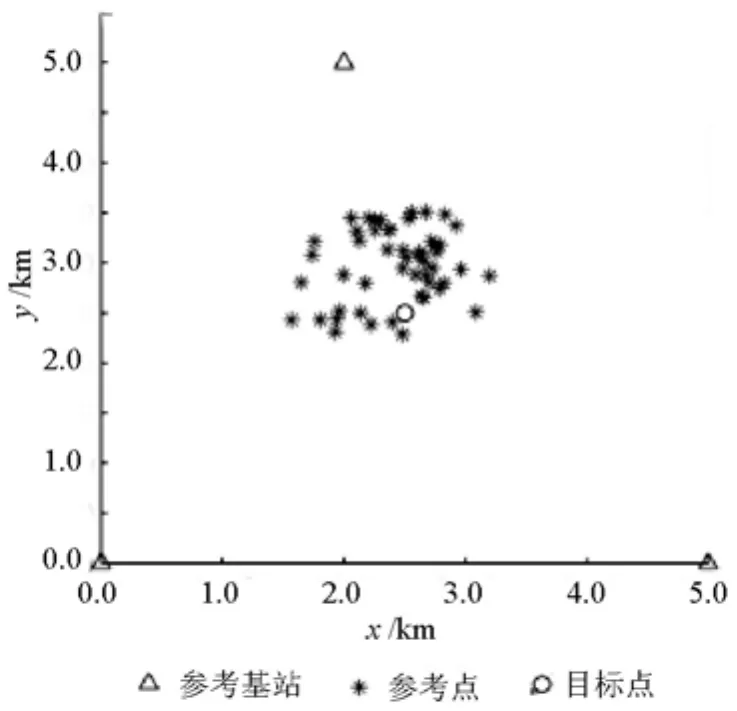
图3 普通场景下文献[7]算法的参考点C位置示意Fig.3 Sketch map for refer-point C of literature[7]under normal scene
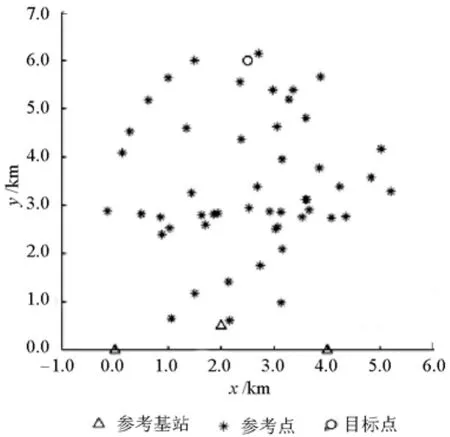
图4 特殊场景下文献[7]算法的参考点C位置示意Fig.4 Sketch map for refer-point C of literature[7]under special scene
图3 和图4分别模拟了50次文献[7]算法在普通和特殊场景下计算的C的位置.通过对比图3和图4可以看出,文献[7]算法在普通场景下,C的位置相对集中在真实目标点周围;而在特殊场景下,C相对真实目标点的偏差,要比普通场景下大很多.
本文在算法设计之初就同时考虑了普通和特殊场景下各自的 LPMD图的特点,采用了和文献[7]算法完全不同的C的计算方式,整个算法分为3步:
第1步 计算所有LPMD的交点Ccrosspoint;
第2步 计算初步参考点并通过负期望补偿来修正;
第3步 通过参考点到LPMD的直线距离来做判决.
首先在计算参考点之前,找出所有LPMD的交点,如图5所示为是单次散射路径信号仿真中的LPMD及其所有交点的计算结果.其中线段为各LPMD,共有49 个交点;目标点位置为(2.5,6.0)km,可以看到,大多数的交点都落在了目标点的附近,只有小部分的交点偏离了很远.这是因为,理想情况下,没有误差等因素影响,单次散射路径信号的LPMD的交点就是目标点的位置,而多次散射路径信号的LPMD会产生离目标点很远的交点.
然后,计算C时,不再使用所有LPMD的两头端点来计算,而是使用所有LPMD的交点来计算,如式(7).

将Ccrosspoint平均之后,得到初步的C的坐标.
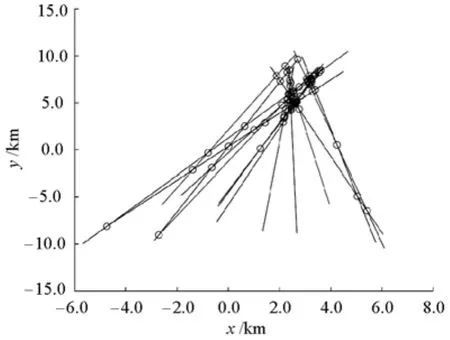
图5 特殊目标环境下的LPMD交点计算示意Fig.5 Sketch map for calculating the cross-points of LPMDs under special scene
由以上分析可知,单次散射路径信号LPMD产生的交点都离目标点相对较近,而多次散射路径信号的LPMD会产生大量的远点,通过取平均来计算参考点时,这些远点把参考点C往其方向拉,从而使计算得出的参考点C偏离目标点较远.尤其是在特殊场景下,如图5所示,LPMD的分布模式大致为扇形放射状,且扇形的头端离目标点很近,但是扇尾部分离目标点很远,这部分的交点在直接做平均的时候,把C从靠近目标点的位置附近拖向了远点方向.所以在计算出初步的参考点之后,应再通过所有交点中的一部分远点对C的位置做负期望补偿,从而对C的位置做修正.
先求出所有交点到修正前C的距离,然后降序排列,取出前Ffixnum个距离最远的点作为优化点,对剩下的Ppointnum-Ffixnum个点做负期望补偿.通过式(8)得到修正后的参考点Ccrt.
式中:Ppointnum为计算得到的所有交点的个数;Ffixnum占Ppointnum的比例和具体环境的非视距干扰程度有关,干扰越大,多次散射路径信号越多,则Ffixnum需要适当增大,经过仿真测试,建议取值为Ppointnum的1/4,后文的仿真对取值选择进行了说明;A为修正系数矩阵,

式中:Ax和Ay分别为横坐标和纵坐标修正系数,经过仿真测试,建议取值为Ax=Ay=1.1.
得到Ccrt之后,计算Ccrt到每条LPMD的距离权重为
式中:δm为以第m条LPMD到Ccrt的距离权值;dm为其对应的距离权重;Lm为第m条LPMD.
然后设置一个权重门限d,大于该门限的判决为多次散射路径,小于该门限的判决为单次散射路径,即

经过仿真测试,推荐 d=0.025.
上述各参数取值虽然是经过仿真给出的建议值,但是相应的值都是在经过对各种复杂的、具有代表性的非视距情景仿真之后,综合各种情景下算法性能得到的具有普适性的值.
在算法复杂度上,相比文献[7]的算法,在得到各侦测站的LPMD之后,本文算法是先计算所有的LPMD的交点,而文献[7]算法是先计算各LPMD的TOA权重,在路径数比较多的情况下,本文算法计算交点的计算复杂度会略高一些,在路径数比较少的情况下,两者计算复杂度相差不大.
4 仿真结果与分析
本文采用圆环散射模型来模拟散射体,散射体个数为3个,随机按散射半径分布在目标点周围;TOA误差为符合N(0,1)分布的加性高斯噪声,AOA误差为符合N(0,π/180)分布的加性高斯噪声,侦测站为3个,单次散射路径为信号从目标点经过1个散射点散射之后分别到达3个侦测站,共有9条单次散射路径;多次散射路径为信号从目标点经过3个散射点中的随机2个和3个点连续散射之后到达侦测站,每个侦测站接收2条,共6条多次散射路径,总共15条散射路径,且不考虑LOS路径,每次仿真独立运行1 000次.分别对普通场景和特殊场景进行仿真,将本文提出的算法与文献[7]中的算法进行比较,并通过仿真对本文算法中的参数选取进行说明.
仿真1 普通场景下,目标点的位置坐标为(2.5,2.5)km,侦测站的位置坐标分别为(0,0)、(2.0,5.0)、(5.0,0)km.散射模型半径为 0.7 km.
通过表1可以得出,普通场景下,本文算法计算的C相对目标点的偏差和文献[7]算法相比,有明显的改进.
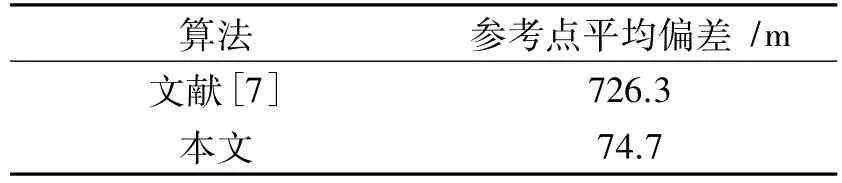
表1 普通场景下两种算法的参考点平均偏差Tab.1 Average deviation between refer-point and real target of both algorithms under normal scene
图6中显示了不同散射半径时,两种算法的识别性能对比,可以看出,本文算法不管是漏警概率还是虚警概率,都明显好于文献[7]算法.随着散射半径的增加,两种算法的识别性能提高,这是因为散射半径越大,圆环模型中的3个散射体相互之间的距离也就更远,从而单次散射信号的TOA值和多次散射信号相比,会有更明显的差异,从而更容易识别.
仿真2 特殊场景下,目标点位置为坐标(2.5,6.0)km,侦测站的位置为(0,0)、(2.0,0.5)、(4.0,0)km.散射模型半径为 1.5 km.
通过表2和表1的比较可以得出,特殊场景下文献[7]算法计算得出的参考点位置偏离真实点很大,比普通场景下的偏差更明显,和图4得到的结果基本一致.而本文算法的偏差只是文献[7]算法的 6.67%.
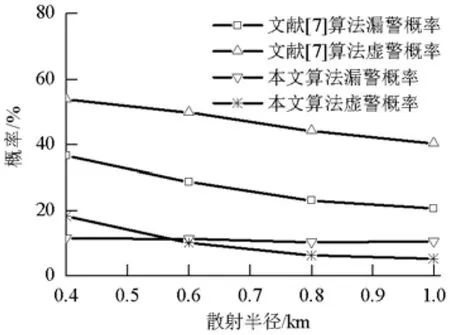
图6 普通场景下不同散射半径时两种算法的识别性能Fig.6 Recognition performance of both algorithms with different scatter radius in normal scenes

表2 特殊场景下两种算法的参考点平均偏差Tab.2 Average deviation between refer-point and real target of both algorithms under special scene
通过图7和图6比较可以得出,随着散射半径的增加,特殊场景也和普通场景一样,两种算法的识别性能都会增加.同时,本文算法的识别性能依旧要明显好于文献[7]算法的.
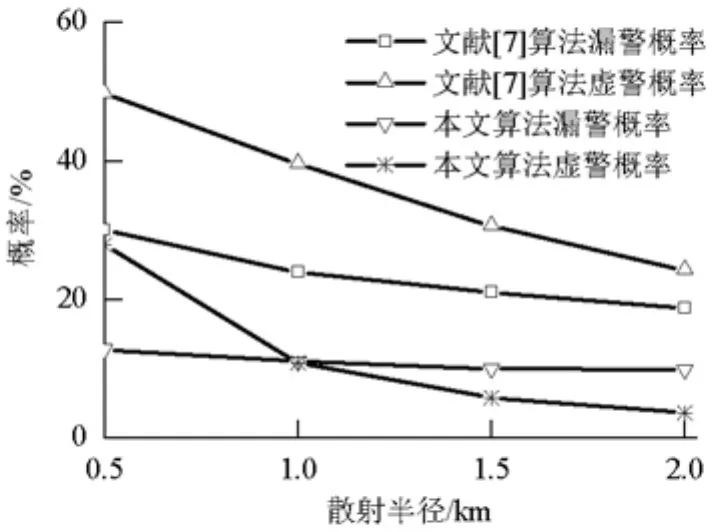
图7 特殊场景下不同散射半径时两种算法的识别性能Fig.7 Recog n ition performance of both algorithms with different scatter radius in special scenes
在图8中,保持散射半径为1.5 km不变,改变目标点的y轴坐标,相当于改变了侦测站和目标点之间的距离.从图8中可以看出,当距离增加时,两种算法的识别性能都变差,但是即使侦测站和目标点之间的距离到了8.0 km,本文算法依旧可以把漏警和虚警概率保持在10%以内.
仿真3 对本文算法中参数Ffixnum的占比情况进行仿真测试,普通场景与仿真1中的场景设置相同,特殊场景与仿真2中的设置相同.为了说明Ffixnum占比取值是如何选出的,先设定其他参数变量:补偿系数 Ax和 Ay设置为1,门限 d参考文献[7]中的取值为 0.2,改变 Ffixnum占 Ppointnum的比例,每次仿真独立运行1 000次,分析算法在不同占比情况下的识别性能.
图9所示仿真结果显示了不同Ffixnum占Ppointnum比例情况下,本文算法的识别性能.从图9中可以看出,在两种场景下,当 Ffixnum占比数为0.25时本文算法具有最小的漏警概率,当比例取0.25时对应最好的识别性能,故上述研究中选择0.25 作为 Ffixnum占 Ppointnum的比值.
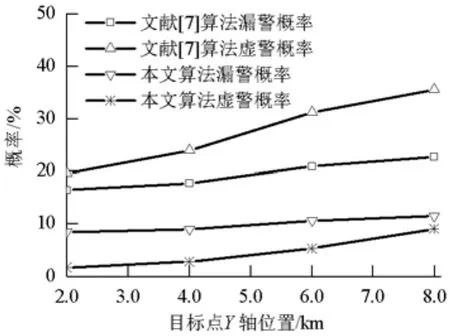
图8 特殊场景下不同目标点距离时两种算法的识别性能Fig.8 Recog n ition performance of both algorithms for different target point distance in special scene
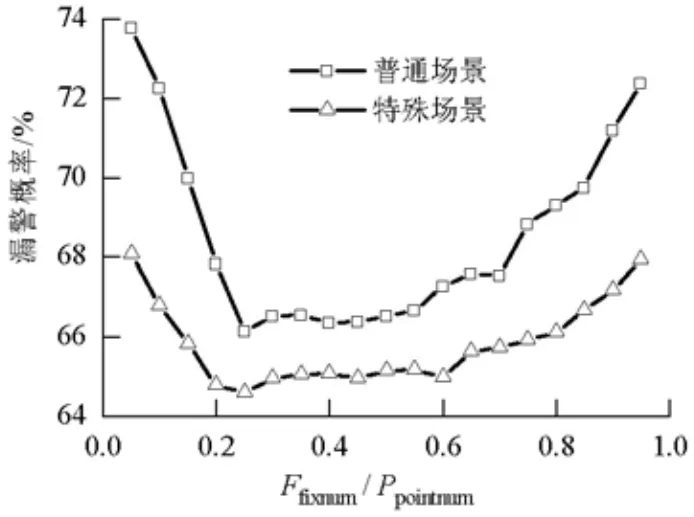
图9 两种场景下不同的识别性能Fig.9 Recognition performance of the new algorithm with different percent of in two scenes
5 结 论
本文提出了一种新的基于LPMD的散射路径识别算法,以所有LPMD交点为基础来计算参考点坐标,并通过负期望补偿来修正参考点的精度,总共只有一次判决,相比文献[7]算法减少了1次额外判决,并且大幅优化了参考点的准确性,不论被测目标处于侦测站围成的区域内侧或外侧时,都能有很好的识别准确度,兼顾普通场景和特殊场景下的识别性能,增加了算法的普适性,在算法的计算复杂度上并没有明显的增加,仿真结果也验证了该方法针对NLOS环境单次、多次散射路径识别问题是有效的.
[1] JATIVA E R,SANCHEZ D,VIDAL J.NLOS mitigation based on TOA for mobile subscriber positioning systems by weighting measures and geometrical restrictions[C]∥ 2015 Asia-Pacific Conference on Computer Aided System Engineering(APCASE).[S.l.]:IEEE,2015:325-330.
[2] SILVENTOINEN MI, RANTALAINENT.Mobile station emergency locating in GSM[C]∥ IEEE International Conference on Personal Wireless Communications.[S.l.]:IEEE Xplore,1996:232-238.
[3] 周非,陈庭盈,范馨月.基于 AOA-TOA重构的单站定位算法[J].重庆邮电大学学报,2012,24(2):222-226.ZHOU Fei,CHEN Tingying,FAN Xinyue.Algorithm of single station location based on AOA- TOA reconstruction[J].Journal of Chongqing University of Posts& Telecommunications,2012,24(2):222-226.
[4] TIAN Z,YAO L,ZHOU M,et al.Scattering model based hybrid TOA/AOA/AOD localization in NLOS environment[C]∥ The Proceedingsofthe Second International Conference on Communications,Signal Processing,and Systems.[S.l.]:Springer International Publishing,2014:893-901.
[5] LIBERTI J C,RAPPAPORT T S.A geometrically based model for line-of-sight multipath radio channels[C]∥Vehicular Technology Conference on Mobile Technology for the Human Race.[S.l.]:IEEE,1996:844-848.
[6] SIMSIM M T,KHAN N M,RAMER R,et al.Time of arrival statistics in cellular environments[C]∥Proceedings of the 64th IEEE Vehicular Technology Conference.[S.l.]:IEEE,2006:2666-2670.
[7] SEOW C K,TAN S Y.Non-line-of-sight localization in multipath environments[J].IEEE Transactions on Moblie Computing,2008,7(5):647-660.
[8] 杨天池,程娟,邵奇峰,等.单站定位中的散射体位置及散射距离的估计方法:合成运动的扩展卡尔曼估计[J].电子学报,2014,42(4):730-735.YANF Tianchi,CHENG Juan,SHAO Qifeng,et al.The estimation of the scatterer position and scattering distance in the single station location: the EKF estimation based on synthetic motion[J]. Acta Electronica Sinica,2014,42(4):730-735.
[9] ZHOU F,FAN X,CHEN T Y.Improved positioning algorithm based on linear constraints on scatterers[J].EURASIP Journal on Wireless Communications and Networking,2013,2013(1):1-10.
[10] CHEN S W,SEOW C K,TAN S Y.Virtual reference device- based NLOS localization in multipath environment[J]. IEEE Antennas and Wireless Propagation Letters,2014,13(13):1409-1412.
[11] ZHU X,SHI M,ZHANG J,et al.A scattering model based non-line-of-sight error mitigating algorithm via distributed multi- antenna[C]∥ IEEE 18th International Symposium on Personal,Indoorand Mobile Radio Communications.[S.l.]:IEEE Xplore,2007:1-5.
[12] AL-JAZZAR S,GHOGHO M,MCLERNON D.A joint TOA/AOA constrained minimization method for locating wireless devices in non-line-of- sight environment[J]. IEEE Transactionson Vehicular Technology,2009,58(1):468-472.
[13] 肖竹,陈杰,王东,等.严重遮挡非视距环境下的三维定位方法[J].通信学报,2015,36(8):68-75.XIAO Zhu,CHEN Jie,WANG Dong,et al.Threedimensionallocalization underseverely obstructed NLOS environment[J].Journal on Communications,2015,36(8):68-75.
[14] MIAO H,YU K,JUNTTI M J.Positioning for NLOS propagation:algorithm derivations and cramer-rao bounds[J]. IEEE Transactions on Vehicular Technology,2007,56(5):2568-2580.
[15] OLENKO A Y,WONG K T,NG H O.Analytically derived TOA- DOA statisticsofuplink/downlink wireless multipaths arisen from scatterers on a hollowdisc around themobile[J].IEEE Antennasand Wireless Propagation Letters,2003,2(1):345-348.
猜你喜欢
电讯技术(2022年1期)2022-02-12 05:16:12
金属加工(冷加工)(2020年11期)2020-11-24 08:58:20
无损检测(2019年11期)2019-11-20 07:07:50
学生导报·东方少年(2019年7期)2019-06-11 11:03:18
测控技术(2018年5期)2018-12-09 09:04:24
精密制造与自动化(2018年1期)2018-04-12 07:42:50
石油地球物理勘探(2017年2期)2017-11-23 06:01:26
数学学习与研究(2017年11期)2017-06-20 00:02:38
青年时代(2017年3期)2017-02-17 01:40:47
城市勘测(2016年2期)2016-08-16 05:58:24