电动物流车远程监控技术研究及系统设计
2018-01-18 18:02:24田韶鹏
自动化与仪表 2017年6期
田韶鹏,吴 博
(武汉理工大学 现代汽车零部件技术湖北省重点实验室 汽车零部件技术湖北省协同创新中心,武汉 430070)
随着互联网的发展和公路网的日益完善,物流行业得到了快速发展,部分物流企业为了扩大规模,需要大量采购物流运输车。在国家政策对电动汽车的大力扶持下,很多物流公司选择使用电动物流车用于市区内的物流运输。
对于电动物流车来说,远程监控系统通过将车辆状态数据实时上传、实时跟踪定位及车辆故障报警等技术,能够改善电动物流车的安全性和可靠性,保证高效快速地完成货物的运送[1]。根据国家在2016年颁布的 《电动汽车远程服务与管理系统规范》[2],并结合企业对于运营电动物流车实时监控的要求,设计开发了针对电动物流车运行状态的远程实时监控系统,并提出了面向车辆实时定位的地图匹配算法对物流车进行实时定位。该监控系统在一定程度上改善了物流车的调度和管理,提高了物流运输效率。
1 电动物流车远程监控系统设计
远程监控系统由车载数据采集终端、GPRS无线网络、Internet网络、阿里云服务器和客户端浏览器构成,系统的拓扑结构如图1所示。监控系统设计包括:车载数据采集终端设计,主要是硬件选型及程序编写;远程监控平台设计,分为平台结构设计和平台功能设计两部分。

图1 监控系统拓扑结构Fig.1 Monitoring system topology
1.1 车载数据采集终端硬件选型
为了满足系统实时监控的要求,对数据采集终端的硬件结构进行选型,其基本架构如图2所示。

图2 车载数据采集终端架构Fig.2 Vehicle data collection terminal structure
针对系统需要处理大量数据的需求,终端载体采用STM32F103系列单片机,并选用Cortex-M3作为主控芯片。该芯片具有高性能、运算速度快、接口丰富、先进的中断处理功能、低功耗、低成本和调试支持等优点。
针对终端数据无线实时传输的要求,选用ALIENTEK发布的高性能工业级ATK-SIM900A GSM/GPRS模块。该通信模块内嵌TCP/IP协议,并能够低功耗实现GPRS数据传输[3]。
针对物流车快速精确定位的要求,选用ATKNEO-6M-GPS模块用于车辆实时定位。该模块定位精度高、性能稳定、抗干扰能力强。
1.2 远程监控平台设计
根据对电动物流车远程监控功能和模块的划分,设计了较为完备的监控平台结构,如图3所示。该监控平台结构采用B/S结构,即浏览器(browser)和服务器(server),其优势在于成本低、开发简单、开发周期短和易于维护,并且可以利用任何能够上网的设备(PC电脑、笔记本电脑、平板电脑等)对车辆进行监控。

图3 监控平台架构Fig.3 Monitoring platform structure
采用Windows+Apache+PHP+MySQL作为监控平台开发的基本架构,应用wampsever软件搭建监控平台调试环境。为了能够提高监控系统的可靠性和容错能力,选用阿里云服务器作为监控平台载体。利用ThinkPHP3.2.3框架开发监控平台各功能模块,并采用AJAX技术通过JavaScript编写的脚本程序操纵后台与服务器进行少量数据交换,能够实现网页异步刷新,以满足电动物流车的实时监控。
监控平台功能设计包括面向车辆监控、面向统计分析和面向企业用户的设计,如图4所示。系统涵盖了10个功能模块,并且针对不同的功能模块开发了相应的用户界面,方便用户与监控平台进行交互。
车辆监控模块以Google-map为平台,能够实时监控车辆位置,并将采集的车辆状态数据显示到Web端。若物流车发生故障,Web端通过解析故障代码显示故障原因,便于车辆维修和保养[5]。统计分析模块通过调用历史数据查询功能,可以查询车辆运行的历史数据,并对车辆的电池运行状态做出评价,以图表的形式显示分析结果。企业用户分为超级管理员、企业管理员和普通企业用户3部分,通过设置不同的管理权限便于系统的管理和维护,用户登录采用密码和验证码双重验证的方式,增加了监控系统运行的安全性和可靠性[4]。

图4 监控平台功能模块Fig.4 Monitoring platform functional module
2 面向车辆实时定位的地图匹配算法研究
远程监控技术包括车辆位置监控、电机和电池运行状态监控、车辆故障报警等。在此,以车辆实时定位为例,研究电动物流车远程监控技术。
在车辆实时定位过程中,采集的GPS数据会在一定范围内漂移和失真,出现定位点偏离实际道路的情况[6]。为满足实时定位的要求,监控系统需要引入地图匹配算法对GPS数据点进行修正定位。地图匹配算法的基本原理是基于电子地图道路层数据,通过计算机程序修正GPS定位点与电子地图道路层数据之间的误差,由此确定车辆在电子地图上的位置。
选用准垂直投影法与基于最小二乘法的多项式曲线拟合相结合的算法,对GPS定位点进行匹配。该算法是根据定位点到候选路段投影的距离、车辆行驶方向、候选路段与前一匹配路段间的拓扑关系,确定最优匹配道路并将定位点进行投影[7]。
2.1 准垂直投影算法
物流车在市区内进行物流配送时,经常会遇到交叉口和转弯的路段。若采用直接投影法,会出现交叉口和弯道处定位点偏离道路的情况,因此采用准垂直投影法确定匹配道路来处理以下2种特殊情况。
车辆行驶到道路交叉口图5(a)中,在交叉路口使用直接投影法,将导致GPS定位点投影到道路c的反向延长线,按照投影距离最小的原则选择道路c作为匹配道路,会造成误匹配。如图5(b)所示,当车辆行驶到道路交叉口时,利用准垂直投影法计算定位点到道路节点的距离。根据定位点到p1,p2,p3的距离确定最优匹配道路,这种方法避免了直接投影造成的误匹配。

图5 交叉口处采用准垂直投影算法的情况对比Fig.5 Comparison of quasi vertical projection algorithm at intersection
车辆转弯如图6(a)所示,车辆转弯时利用传统的直接投影算法,定位投影点位于曲线段点o和点p的连线与线段op垂线的交点处[8]。如图6(b),在车辆转弯时采用了弯道分割求投影法,即在计算GPS定位点到弯道的垂直距离时,将弯道分割成若干段,然后从定位点向每条曲线段做投影,选择定位点距离投影点最近的点作为匹配点。这种算法减小了直接投影法造成的定位误差。

图6 转弯路段采用准垂直投影算法的情况对比Fig.6 Comparison of quasi vertical projection algorithm in bend
2.2 基于最小二乘法的多项式曲线拟合
利用准垂直投影算法对定位点匹配后,若匹配区域存在多条候选道路,则需要用曲线拟合算法将若干孤立的定位投影点拟合得到轨迹曲线。通过计算拟合曲线在当前定位点处的斜率,并与电子地图中候选道路的斜率相比较,选出唯一匹配道路。
最小二乘法多项式曲线拟合,根据给定的数据选取一些数据点 pi(mi,ni),其中 i=1,2,…,k,求近似曲线 n=φ(m),并且使得 φ(m)与实际曲线 n=f(m)的偏差最小。近似点在点pi处的偏差为

根据近似曲线与实际曲线的偏差和最小的原则拟合曲线得到

根据采集数据点求得的拟合多项式为

并按照各点到拟合曲线的距离求得偏差平方和为

由于式(4)可以看作关于ai的多元函数,为求得符合条件的a,对式(4)右边求ai的偏导数,可得:

将求得的偏导数方程组用矩阵积的形式表示,化简可得:

选取了包括当前定位点在内共5个GPS观测点,按所述曲线拟合算法,拟合获得1条大致反映车辆行驶轨迹的曲线,同时求出该曲线在当前定位点的斜率为

由地图匹配原理可知,斜率近似表明了车辆的行驶方向。 (xi,yi)(i=1,2,3,4,5)为曲线拟合定位点坐标,(x5,y5)为当前定位点坐标。
比较候选道路与拟合曲线斜率,当夹角小于30°时,该道路即为匹配道路[9]。若采用曲线拟合匹配之后,仍存在超过1条候选路段,则利用代价函数s选定最佳匹配道路:

式中:k为5点拟合曲线斜率;k0为候选路段斜率;d为利用准投影算法得到的GPS定位点到候选路段的距离;p1和p2分别为角度与投影距离的加权值,有p1+p2=1,可根据实际情况选用加权值,在此p1=0.6,p2=0.4。
2.3 算法流程
图7为实时定位算法流程,其具体步骤为
步骤1通过GPS模块接收车辆位置信息,并从数据包中解析出当前定位点的经纬度,接着对数据进行筛选,剔除坏点;
步骤2以当前GPS定位点为圆心,以60 m为半径建立匹配缓冲区。采用准投影法计算定位点到各路段的距离d,将投影距离d≥30 mm的道路从匹配缓冲区中剔除;

图7 算法流程Fig.7 Algorithm flow chart
步骤3判断前一定位点的匹配道路与匹配缓冲区内的候选道路是否有几何拓扑关系。若无拓扑相连的关系,则认为该点是无效信息点,跳回步骤1;
步骤4若匹配缓冲区内仅有1条待匹配路段,则跳到步骤5,若有多条候选道路,则选取5点定位数据进行曲线拟合分析,根据代价函数s确定匹配最优道路;
步骤5采用准投影法将当前GPS定位点投影到选定的匹配路段。
3 实车验证
在项目初期的实车试验中,使用某品牌电动物流车,对远程监控系统的实时性和准确性、车辆实时定位的精度进行试验。
由图8远程监控管理平台主界面可见,该平台可以实时显示车辆运行状态、电机和电池运行状态。经测试,数据采集终端平均每10 s向服务器发送1次数据包,在网速良好的情况下,Web端每5 s检查1次数据库,并将更新的数据迅速显示到Web端,监控系统显示出良好的实时性。

图8 远程监控管理平台主界面Fig.8 Main interface of remote monitoring platform
调用车辆历史数据查询功能,能够查看车辆行驶过程中锂电池组SOC和电流的变化,如图9所示。
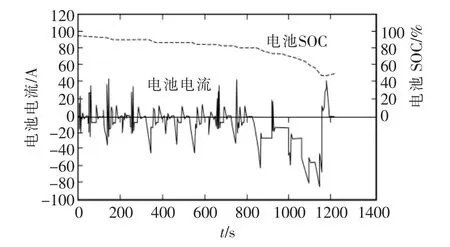
图9 锂电池组状态Fig.9 Lithium battery status
在武汉市选择从广埠屯至光谷广场这段路进行物流车实时定位测试,图10为选定的驾车路线。测试路段具有道路交叉口(路段1)、弯道(路段2)和直线路段(路段3)等城市道路特征,满足基本测试要求。

图10 测试路段Fig.10 Test section
未使用定位算法时,终端采集68个数据点,其中18个定位成功,定位效果如图11(a)所示。车辆在直线路段时,定位点散乱且发生漂移;车辆通过道路交叉口时,电子地图无法准确定位车辆位置;车辆通过弯道时,电子地图显示的定位轨迹严重偏离道路中心线。试验表明,无算法的车辆定位方式不能满足物流公司对于车辆定位的要求。
将监控系统导入定位算法后,终端采集的数据点全部定位到行驶路段,如图11(b)所示。试验结果表明,车辆在直线路段、交叉路口和弯道等路段的行驶过程中,车辆的定位轨迹与道路中心线重合度较高,实时定位效果得到改善。该算法可以满足电动物流车实时定位的要求。

图11 车辆轨迹的试验结果Fig.11 Test results of vehicle trajectories
4 结语
本文设计了电动物流车远程实时监控系统的结构及各功能模块。通过实车试验,验证了该远程监控平台能够迅速、准确地对电动物流车的实时运行数据进行显示和监控,并且通过历史数据查询功能监控锂电池组的整体运行状态。提出的准垂直投影和基于最小二乘法的多项式曲线拟合相结合的算法能够将采集的GPS定位点与道路数据准确匹配,达到了电动物流车实时定位的要求。该监控平台采用的B/S结构不受地域和器材的限制并且受众较广,以后可以开发出针对普通用户的车辆监控模块。
[1]罗远超.电动物流车远程监控系统设计与实现[D].湖南:南华大学,2013.
[2]GB/T 32960.1—2016电动汽车远程服务与管理系统技术规范,第1部分:总则[S].2016.
[3]李亚伦,徐健,柳伟,等.电动汽车远程监控与服务系统开发[J].电子技术应用,2016,42(12):34-36,40.
[4]陈天殷.车联网系统结构核心技术与新能源汽车[J].汽车电器,2016,51(7):1-6.
[5]戴立坤.基于物联网技术的物流车辆远程故障诊断定位系统设计[J].物流技术,2014,33(9):441-443,472.
[6]杜常清,杜刚,朱一多,等.电动汽车远程监控技术研究及平台开发[J].汽车工程,2015,37(9):1071-1076.
[7]苏洁,周东方,岳春生.GPS车辆导航中的实时地图匹配算法[J].测绘学报,2001,30(3):252-256.
[8]陈嘉,胡继华,张飞舟.面向车辆监控导航的地图匹配算法研究[J].北京大学学报:自然科学版,2009,45(2):299-305.
[9]杜刚.电动汽车远程数据管理平台研究[D].湖北:武汉理工大学,2014.
猜你喜欢
电气化铁道(2023年6期)2024-01-08 07:45:48
工会博览(2022年5期)2022-06-30 05:30:18
保健医苑(2021年9期)2021-09-08 14:38:06
中国交通信息化(2021年2期)2021-07-22 07:34:40
IEEE/CAA Journal of Automatica Sinica(2021年2期)2021-04-22 03:54:26
数学物理学报(2021年1期)2021-03-29 03:14:42
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25 01:40:34
建材发展导向(2019年11期)2019-08-24 06:34:56
学生天地·小学低年级版(2019年5期)2019-06-05 01:15:11
学生天地(2019年15期)2019-05-05 06:28:28