
搜寻放射源机器人系统的设计
2018-01-18 04:33姜明明赵永国刘成业
自动化与仪表 2017年9期
姜明明,赵永国,刘成业,孙 洁,朱 琳
(山东省科学院自动化研究所 山东省机器人与制造自动化技术重点试验室,济南250014)
放射源在工业、农业、医疗、同位素仪表和科学研究等领域[1]已得到广泛的应用。然而放射源丢失事件却时有发生,2014年南京铱-192放射源丢失事件[2],造成多人受照。目前,对于丢失的放射源多采用人工搜寻的办法,不仅效率低,还容易使搜索人员遭受核辐射的危害。使用搜寻放射源机器人,不需要人员到丢失现场进行搜寻,不仅提高了工作效率,还可以避免搜索人员遭受核辐射的危害,因而研制一款自动搜寻放射源的机器人具有重要意义。
切尔诺贝利事件中,德国的Mobot-CHHV[3]用于清除放射性垃圾;美国irobot的Packbot[4]机器人以及日本的Quince[5]机器人在福岛核电站事故[6]中参加了救援工作,然而这些机器人并非专用的放射源搜索的机器人。国内东南大学[7]研制出了遥控防化机器人,哈尔滨工业大学[8-9]对寻源算法进行了研究,这两项研究均采用单个寻源传感器,寻源算法复杂。
在此,设计了一种搜寻放射源的机器人,采用了核寻源传感器A和传感器B对放射源进行定位,寻源算法简单,稳定性高。操作盒构成的规划级和车载端构成的控制级,实现了放射源自动搜索定位的功能,且定位精确,系统稳定可靠。
1 搜寻放射源机器人系统
搜寻放射源机器人,主要由操作盒构成的规划级、车体机器人组成的控制级以及寻源传感器系统三部分组成。操作盒和车体之间采用无线网络和485数传电台进行通信。系统架构如图1所示。
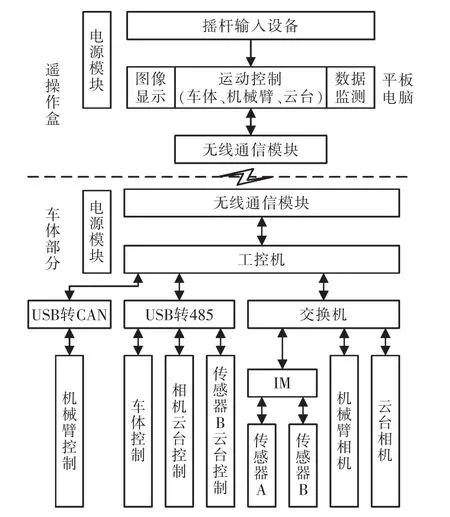
图1 系统架构Fig.1 System architecture
如图所示,遥操作盒发送控制指令给车体工控机,进而控制车体、机械臂、相机云台、传感器B云台运动,同时显示车体部分反馈的实时图像、车体运行的速度、放射源剂量率、放射源角度等信息。车体部分主要接收操作盒传来的指令,并控制相关设备执行对应的动作,同时将传感器采集的信息反馈给操作盒。
1.1 规划级操作盒
由操作盒构成的规划级,是整个系统的指令发送和信息采集处理的总终端。控制级收到规划级的控制指令后,才执行各种动作。操作盒的结构如图2所示。
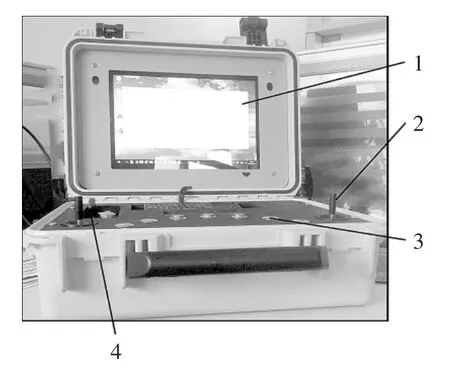
图2 操作盒结构Fig.2 Operation box structure
如图所示,显示屏Pad主要接收输入控制信号和显示控制级反馈的信息;二自由度摇杆,作为规划级的输入设备;按键为电源通断按键以及地址切换按键;天线包括无线通信模块天线和485数传模块天线。盒体内部装有四维键盘控制板。四维键盘是规划级的输入设备,通过配置其地址,可以选择控制车体运动、云台运动、机械臂运动等。
1.2 控制级车体
搜寻放射源机器人控制级的结构如图3所示。控制级主要由六轮六驱动移动平台、六自由度机械臂、监控云台、控制箱组成。其中,控制箱装有工控机、供电模块、网络通信模块、485数传模块和通信转换接口等。
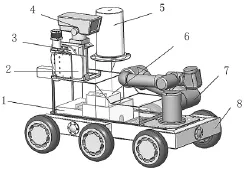
图3 搜寻放射源机器人结构示意Fig.3 Structure of robot for locating gamma radiation source
如图所示,机器人壳体的内壁防护材料为1 cm铅板。监控云台可以控制摄像机360°旋转,上下0°~180°运动。控制箱中,核心控制模块为工控机,主要通过无线通信接收操作盒的控制指令,进而控制车体、机械臂、云台的运动。工控机将核寻源传感器A和传感器B采集的信息处理后,用于控制车体向指定位置运动。机械臂由六自由度关节机机械臂和抓手组成。六驱动移动平台主要由6个轮毂电机、6个驱动器和碳钢车体组成。
1.3 寻源传感器系统
寻源传感器系统,主要由传感器A,传感器B,传感器接口模块(IM)和用于放射源搜索控制的数据采集软件组成,如图4所示。
传感器A是一款伽马射线检测设备,可以检测伽马放射源剂量率,确定放射源所在的方位角。传感器A测量范围为3.7×10-7~10 Gy/h,辐射剂量的基本误差<20%。传感器A测量方向范围为0~360°,当辐射剂量<10 μGy/h 时,角度测量误差为±30°;当辐射剂量>10 μGy/h时,角度测量误差为±5°。 在放射源未知或者剂量率较小时,适宜采用传感器A确定放射源的大体方位。
传感器B也是一款伽马射线检测设备,测量范围为7×10-5~100 Gy/h,传感器B所测伽马辐射剂量的基本误差为20%。传感器B角度方向范围为±15°,角度误差为±2°。在放射源大体方位确定后,就可以使用传感器B进行精确定位。
IM的主要作用是给传感器B和传感器A供电,同时将传感器B和传感器A采集的信息通过网络发送给车体工控机上的数据采集软件。
数据采集软件是寻源传感器系统的核心,主要采集、处理并显示两传感器采集的放射源剂量率和角度信息。
2 核防护
核防护是搜寻放射源机器人与普通机器人的重要区别。核辐射会影响其电子设备、相机等的正常工作。目前的核辐射防护一般有4种方法[10]:屏蔽防护;时间防护;距离防护;个人卫生防护。本设计主要采用屏蔽防护。车体部分采用1 cm铅板附挂在其外壳内侧;工控机、无线通信模块等设备由壁厚为4 cm的铅盒单独封存;摄像头采用铅玻璃防护。
3 寻源算法
放射源搜索采用三角定位法。其原理如图5所示,A为车体初始位置,C为未知的放射源的位置。
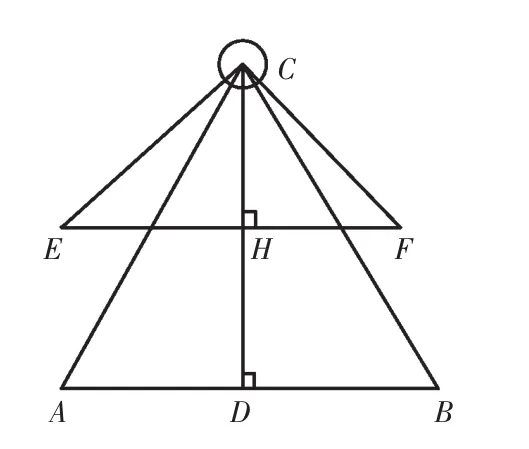
图5 放射源三角定位法Fig.5 Triangle localization for gamma radiation source
车体在A点时,打开数据采集软件上的传感器A的“开始”按钮,读取当前剂量率数值和∠A度数α;车体运动到B点时,读取当前剂量率数值和∠B度数β。线段AB的距离l可以通过车体的速度和运行时间求得,故为已知。已知三角形的两角和一边,根据三角形相关定理,就可以求得中垂线CD的长度h和CD线段在平面中的位置:

然后,车体运动到D点,沿线段DC运动到CD的中点H点。在H点所在的直线EF上,随机选取2点如E点和F点,重复上一步的流程,找到△CEF的中垂线CH(中垂线不一定与上一次的中垂线重合),控制车体沿CH运动到CH的中点处,重复以上步骤。
若测得的剂量率>3.7×10-5Gy/h,或经计算得到车体距离放射源较近时,可以关闭传感器A,打开角度误差更低的传感器B。重复以上测量的步骤,直至找到放射源。
4 软件设计
搜寻放射源机器人软件设计,主要包括车体部分软件设计和遥操作盒部分软件设计。
车体部分软件设计基于C++编程语言实现七大功能模块的功能:①移动平台电机控制模块,基于485通信,通过6个驱动器控制6个无刷直流电机运动;②机械臂控制模块,采用CAN通信协议控制机械臂;③相机云台控制和传感器B云台控制,采用485通信,基于pelco协议控制这两个二自由度的云台;④获取数据采集软件读取的传感器B和传感器A采集的剂量值和角度值,并反馈给上位机;⑤控制车体摄像机和机械臂摄像机实时采集现场图像;⑥根据采集的角度值和剂量值控制车体自主导航;⑦接收遥操作盒发送的控制指令,发送车体传感器的实时数据给遥操作盒。
遥操作盒部分采用C++语言编程,实现以下功能:①实时采集摇杆传送来的控制指令;②将摇杆或者点击触摸屏控制按钮的指令传递给车体控制器,实时接收车体控制器传来的数据,并实时显示分析。显示的数据包括实时采集的图像,传感器B剂量率、角度,传感器A剂量率、角度,车体的速度值,电池电压,等;③功能切换,自主导航和人工控制可切换。
5 性能测试
为了测试寻源机器人的性能,在非辐射条件下对机器人的控制性能进行测试。在中国计量院Cs-137辐射环境下对传感器A和传感器B的剂量率、角度进行了测试。
在非辐射环境下,分别对移动平台的力学性能、通信性能、续航能力、机械臂控制能力、云台控制能力、相机图像采集能力等方面进行了测试。测试结果为机器人最大速度为1 m/s;爬坡角度15°;无遮挡的情况下通信距离>400 m;能够控制机械臂运动;能够控制云台做俯仰与旋转运动;相机可以实时抓取图像,且图像能在遥操作盒上显示;车体最大负重180 kg;电池巡航时间>4 h。
在放射源环境下分别对传感器A和传感器B所测量的剂量率和角度值进行了4次试验。
传感器A剂量率试验时,传感器A参考箭头与实际放射源成180°,在实际值剂量率为0.4×10-7Gy/h环境下,传感器A所测的剂量率误差为8%;在剂量率为 0.4×10-7~9.34×10-2Gy/h 范围内随机选取 5 组数据,传感器A所测的剂量率误差均<20%,故可以用于寻源机器人。
传感器A角度误差试验时,在放射剂量率为1×10-3Gy/h 和 1×10-6Gy/h 时,设置不同的角度(0~360°范围内),分别进行5次试验。试验结果如表1所示,角度误差均<±13°,满足对放射源所处区域的粗定位。
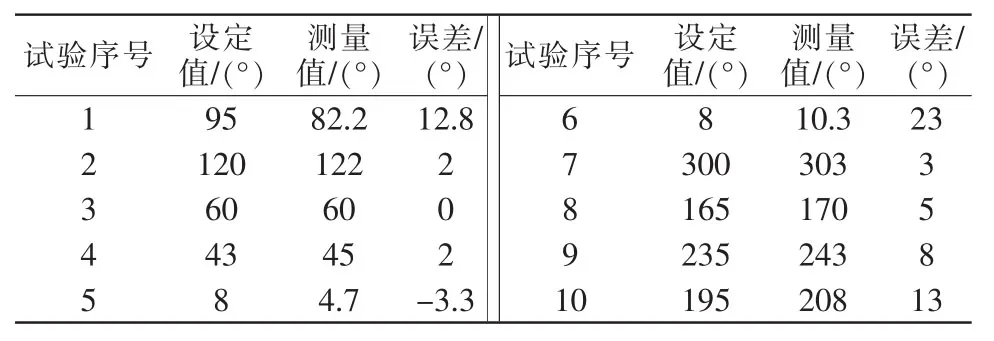
表1 传感器A角度测量结果Tab.1 Sensor A angle measurement results
传感器B剂量率试验时,传感器B参考箭头与实际放射源成0°,在剂量率为4×10-5Gy/h环境下,传感器B剂量率误差为2.2%;在剂量率为4×10-5~3×10-2Gy/h范围内选取5组数据,传感器B剂量率误差均<20%,故可以用于寻源机器人。
传感器B角度误差试验时,在放射剂量率为0.05,0.1,1×10-6Gy/h 下,设置不同的角度(±15°范围内),分别进行数次试验。试验数据如表2所示,结果表明,除临界角度为15°时角度测量误差为-5.87°,其他角度误差均<2°,满足对放射源所处区域的精确定位。
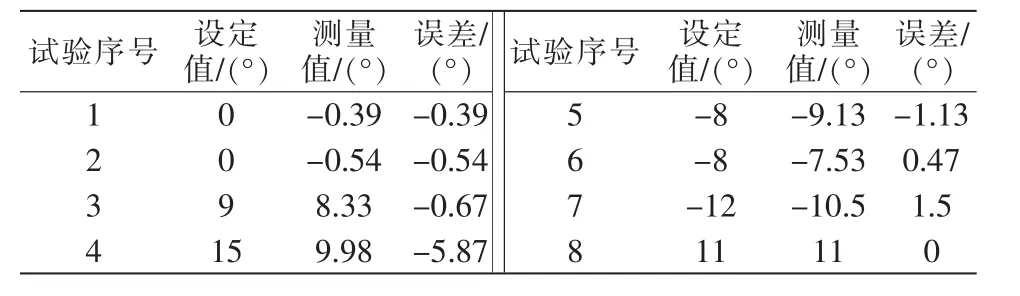
表2 传感器B角度测量结果Tab.2 Sensor B angle measurement results
6 结语
针对伽马放射源丢失时的寻源需求,研制了一款基于进口寻源传感器的六轮移动寻源机器人。该机器人采用无线通信方式进行远程控制,通过摄像头可实时监控现场环境。基于传感器B和传感器A采集的数据,既可以实现对放射源的人工手动搜索,又可采用三角定位法实现自动寻源。有源环境和无源环境的试验结果表明,该寻源机器人可以用于放射源的搜寻。下一步将进行实地寻源试验以及机械臂抓取试验。该机器人研制成功后,可广泛用于放射源的搜寻以及核电站环境检测等,将大大减轻核辐射对放射性工作人员的伤害。
[1]华亚,朱万宁,董强敏,等.耐强辐射遥控探测机器人研制[J].核电子学与探测技术,2015,35(1):74-78.
[2]周晓剑,周启甫,王晓涛,等.南京铱-192放射源丢失事故受照人员物理剂量初步估算[J].环境与职业医学,2014,31(8):605-607.
[3]Jeffrey Aboual.Trial by fire:Teleoperated robot targets chernobyl[C]//IEEE Computer Uraphics and Applications.1998:10-14.
[4]Magnuson Stew.Search and rescue robots needed,but market has yet to develop[J].National Defense,2011(96):24-26.
[5]Eric Rohmer,Tomoaki Yoshida,Kazunori Ohno.Quince:A collaborative mobile robotic plat form for rescue robots research and development[C]//Proceeding of International Conference on AdvancedMechatronics.Japan:[s.n.],2010:22-230.
[6]刘呈则,严智,邓景珊,等.核电站应急机器人研究现状与关键技术分析[J].核科学与工程,2013,33(1):97-105.
[7]钱夔,宋爱国,熊鹏文,等.基于高斯模型的核探测机器人寻找核辐射源方法[J].高技术通.2013,23(3)282-2008.
[8]倪诗翔.失控放射源搜寻机器人设计与寻源算法研究[D].黑龙江哈尔滨:哈尔滨工业大学,2015.
[9]周磊.寻源机器人控制系统设计及其机械臂负载能力优化[D].黑龙江 哈尔滨:哈尔滨工业大学,2008.
[10]杨文锋,刘颖,杨林,等.核辐射屏蔽材料的研究进展[J].材料导报,2007,21(5):82-85.
猜你喜欢
宇航计测技术(2022年4期)2022-09-07
四川环境(2022年4期)2022-08-26
核安全(2022年3期)2022-06-29
核安全(2022年3期)2022-06-29
核安全(2021年6期)2021-12-31
摄影之友(影像视觉)(2020年2期)2021-01-14
影像视觉(2020年2期)2020-03-19
航天器环境工程(2019年2期)2019-04-25
物理学报(2019年6期)2019-04-10
电子制作(2019年23期)2019-02-23
