
汽车行驶跑偏测试中无线通信系统的研究
2018-01-18 04:33刘渊博何耀华
自动化与仪表 2017年9期
刘渊博,何耀华
(1.武汉理工大学 汽车工程学院,武汉 430070;2.现代汽车零部件技术湖北省重点实验室,武汉 430070)
汽车行驶跑偏是指汽车在平直路面上行驶时,轻抚或完全松开方向盘,汽车不按直线方向行驶,而是自动向左或向右偏驶的异常现象,是汽车运行中常见的故障之一。汽车跑偏的危害很大,轻则造成啃胎、轮胎报废,重则导致爆胎、车辆失控等危险状况,甚至引发严重的交通事故[1-3]。在车辆生产制造和装配调整过程中,不可避免地存在一定误差,因此从生产线下来的汽车总会或多或少地存在行驶跑偏问题[4],为避免存在严重跑偏问题的车辆进入市场,急需开发出一套性能可靠的汽车跑偏在线测试系统,对下线车辆进行跑偏检测。
目前汽车行驶跑偏量的测试方法有很多。在此,综合考虑测试精度、成本、可靠性等因素,选用基于激光测距的汽车行驶跑偏测试方法。无论哪种测试方法,无线通信系统的实时性和可靠性都是整个测试系统正常运行的前提。本文根据跑偏测试系统需求,建立了一个无线通信系统,使汽车进行跑偏测试时,利用手持终端收发测试指令,传输被测车辆信息,获取测试结果,存储及查询测试信息,提高测试效率。
1 汽车行驶跑偏测试系统
1.1 工作原理
基于激光测距的汽车行驶跑偏测试系统的总体构成如图1所示。车辆跑偏测试区为长70 m,宽6.2 m的车道,其中直线引导区跑道长20 m,测试区跑道长50 m。系统的测试现场如图2所示,在测试区起点A,B,终点C处道路两侧分别安装一对测试用激光测距仪(F1-F2,F3-F4,F5-F6),每侧的激光测距仪位于同一直线上,在每对激光测距仪的前方50 cm 处安装对射式光电开关(T1-R1,T2-R2,T3-R3)。
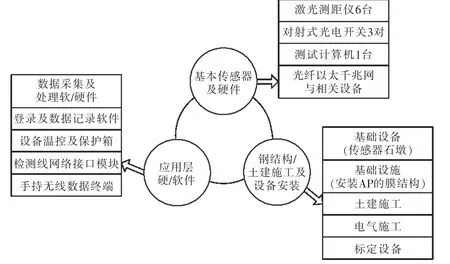
图1 汽车跑偏测试系统总体构成Fig.1 Overall composition of vehicle driving wandering test system
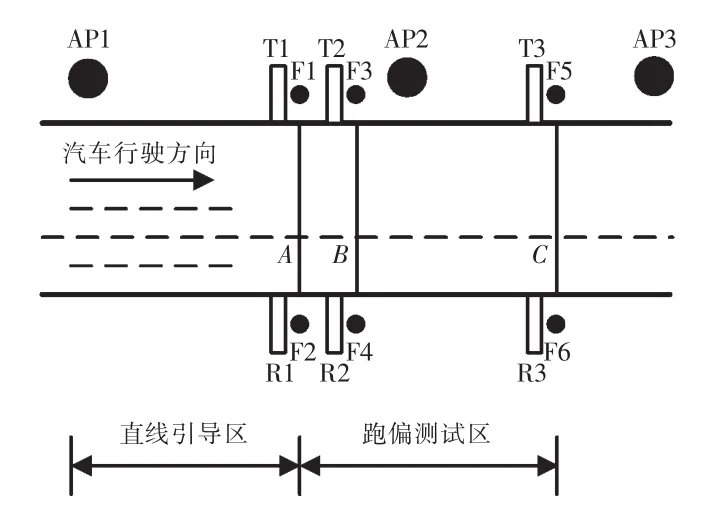
图2 汽车跑偏测试系统现场示意Fig.2 Scene sketch of vehicle driving wandering test system
首先,测试人员用手持终端扫描车辆VIN码,并将其发送给测试主机,然后驾驶被测车辆至测试激活点处(AP1处,亦即直线引导区起点处)时,按下手持终端的“start”键,激活测试。在直线引导区内将方向盘摆正,以50~90 km/h的车速匀速行驶,行至A,B,C测点处时,车辆依次触发相应的对射式光电开关,阻断信号控制器将其转换成激光测距仪的激活信号,激光射向车身,开始测距。测距结果传至计算机主程序处理,从而计算出测试车辆的跑偏参数。
测试结束后,手持终端可以通过建立的无线通信系统收到测试主机传来的测试结果,引车员可根据测试结果做下一步测试的安排。
1.2 跑偏参数计算
跑偏参数计算如图3所示,L1为考虑车辆驶入角和跑偏时车辆的实际行驶轨迹;L2为仅考虑驶入角而未考虑跑偏时车辆的理想行驶轨迹[5]。设m为A,B处激光测距仪之间的距离,m;L为A,C处激光测距仪之间的距离,m;d1,d2,d3,d4,d5,d6分别为激光测距仪的测试结果,mm;θ为被测车辆驶入角。
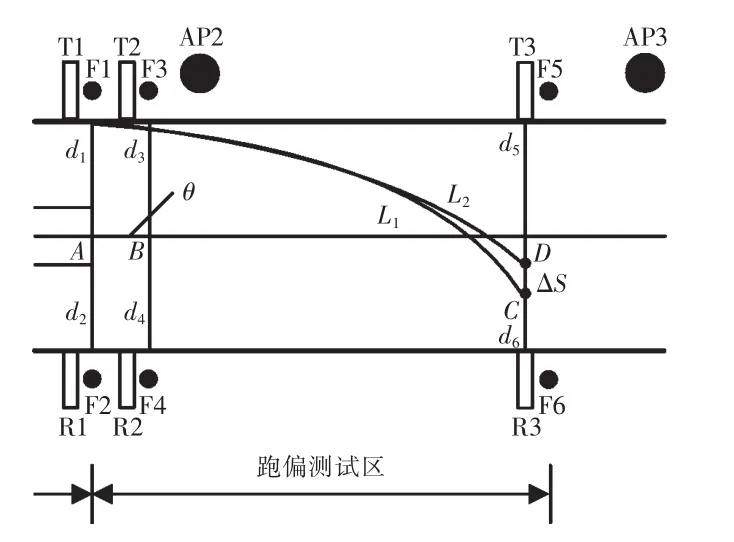
图3 跑偏参数计算原理Fig.3 Schematic of driving wandering parameters calculating
跑偏参数计算如下:
1)被测车辆的驶入角θ
由于实际设置的A,B两测点的距离m很短,约为5m,而被测车辆在测试区的车速为50~90 km/h,被测车辆驶过A,B两测点的时间仅为0.2~0.36 s。因此,被测车辆在A,B测点之间的行驶轨迹对车辆跑偏的影响可以忽略不计,仅需考虑驶入角θ造成的车辆偏移。由图3可得,被测车辆进入测试区时的驶入角θ为

2)被测车辆跑偏量ΔS
根据L1和L2的含义,排除了驶入角对车辆跑偏量的影响后,实际跑偏量为

式中:ΔS为被测车辆的实际跑偏量,mm。
3)被测车辆跑偏方向的判断
若 ΔS>0,车辆向右跑偏;若 ΔS<0,车辆向左跑偏。
2 无线通信系统建立
在进行汽车跑偏测试时,在测试车辆和测试系统之间需要一个相互联系的纽带,以保证测试信息得以高速实时地交换。经过多次试验,最终使用了无线通信系统。
汽车行驶跑偏测试中无线通信系统需要具备以下功能:①能覆盖测试区前后50 m距离且信号良好(数据掉包率不超过5%);②手持终端能快速接入无线网;③手持终端在AP之间漫游时,AP之间切换时间短(一般不超过1 s);④辨识测试车辆身份信息,并完成测试车辆登录;⑤保证测试指令的传输顺畅;⑥保证测试结果与被测车辆一一对应。
2.1 硬件组成
考虑到无线通信系统的覆盖范围及数据掉包率要求,采用星型结构进行布局[6],如图4所示。以测试主机为中央节点,3个瘦AP与无线交换机一起构建起整个无线通信系统。瘦AP通过有线网络与测试主机以及无线交换机连接,手持终端通过无线通信系统与相连的瘦AP进行数据交互。作为中央节点的测试主机将无线通信系统与生产网络连接起来,通信系统内任何数据的交互都通过主机完成。
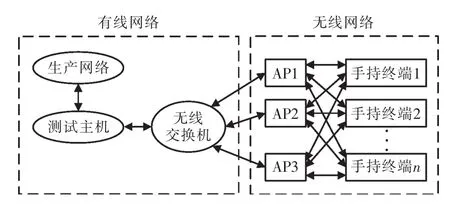
图4 星型结构无线通信系统Fig.4 Star-network wireless communication system
2.2 软件结构
2.2.1 网络体系结构的选择
目前常用的网络体系结构有OSI参考模型和TCP/IP协议2种。OSI参考模型又称开放系统互连参考模型,其将通信过程分解为7层,每层执行相应的功能。OSI中的物理层和数据链路层被统一成接口层,OSI中的会话层、表示层和应用层被统一成应用层。
而TCP/IP协议采用4层结构。TCP/IP协议由于其实用性、流行程度,已成为事实上的国际标准,因此本系统采用TCP/IP协议来建立相应的通信网络。
2.2.2 通信协议的选取
TCP/IP协议中的传输层有2种通信协议,即TCP协议和UDP协议,两者之间的对比如表1所示。

表1 两种协议的对比Tab.1 Comparison of the two agreements
本系统要求手持终端与测试主机之间能够可靠地传输测试指令和测试结果,故选取TCP协议比较合适。
2.2.3 计算模式的选择
目前常用的计算模式有Client/Server模式和Browser/Server模式2种,其对比如表2所示。
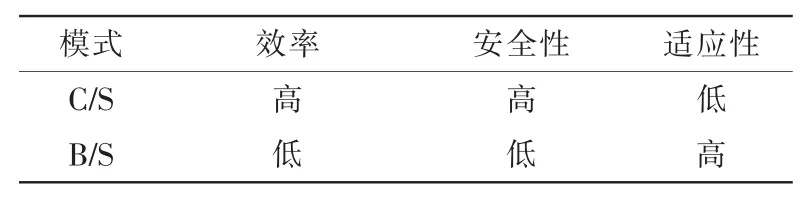
表2 两种计算模式的对比Tab.2 Comparison of two computing models
由于本系统中的客户端数目固定,程序更新时的工作量并不大,所以适应性不是主要考虑的因素。汽车跑偏测试无线通信系统要求手持终端和测试主机之间通信迅速安全,且运行在局域网里,故选择C/S计算模式较为合适,即手持终端作为客户端,测试主机作为服务器。
2.2.4 数据传输协议的制定
由于TCP协议是面向数据流的,这就意味着接收端所接收到的数据之间没有边界[7]。如果服务器连续发送数据,手持终端有可能一次接收动作中会接收到2个或多个数据包,也可能一个数据包分多次接收,这2种情况接收到的数据在缓冲区中都是没有边界的,就会导致数据传输混乱。对此,有以下3种解决方案:
建立固定长度缓冲区这种方案很容易实现,能够避免数据传输混乱,但其灵活性不好,即使要发送很短的数据,也要占用设定的固定长度的缓冲区,造成了空间资源浪费。
发送带结束标记的数据即传输数据时,在数据的末端加一个特殊字符作为数据传输完成的结束标记,但要将规定的特殊字符与要发送的数据区别开来,否则也会造成数据传输混乱。
建立自适应长度缓冲区设计一种新的数据结构,把数据长度信息封装在数据内部。发送端每次发送数据之前必须先发送1 B的数据表示数据长度信息,再发送实际的数据内容;接收端先建立1 B大小的缓冲区用来接收数据长度信息,根据数据长度信息再建立相应长度的缓冲区来接收实际数据内容。
综合对比,可以看出第3种方案既能避免数据传输混乱,又不会造成空间资源的浪费,故而选择在接收端建立自适应长度缓冲区的数据传输协议。
3 无线通信策略研究
3.1 多端口通信方式
由于测试量大,测试速度高,测试准备区域较短,所以车辆在测试区前会出现排队拥堵现象。若此时各个测试人员都向系统发出登录信息,不仅会加重通信系统的处理负担,更会造成测试信息的传输错乱。为此,手持终端和主机之间采用多端口多线程通信方式[6],每次通信都在指定的不同端口处理,分工明确,避免了数据传输混乱,减轻了服务器负担,提高了通信效率。
测试主机通过10001端口监听手持终端发来的服务器状态请求,若已有客户端与服务器连接,则客户端收到“busy”信息,等待1 s后再次发送状态请求;若服务器“空闲”,客户端收到“test”信息,相对应的被测车辆即为即将进入测试区进行测试的车辆。接着,测试主机通过10002端口监听手持终端发送来的车辆VIN码,接收到后启动测试。测试完成后,手持终端通过10003端口监听测试主机发送的测试结果,测试人员根据测试结果进行下一步安排。服务器和客户端之间的主要工作流程如图5所示。
采取多个端口进行通信,测试人员可获得较全的信息反馈,对于各种信息反馈作出相应的调节。而且由于测试主机通过10001端口所置的测试许可车辆只有1辆,保证了测试信息与车辆的一一对应关系。较之单个端口而言,各端口功能明确,通信系统扩展性、可维护性较好,便于构建更为复杂的通信系统。
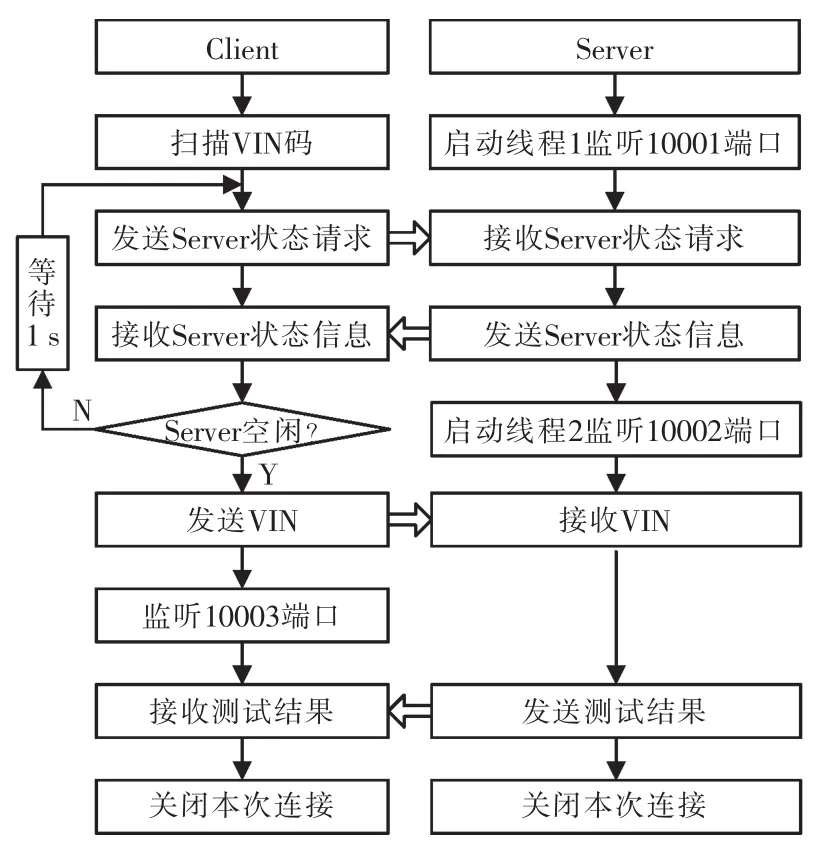
图5 服务器和客户端工作流程Fig.5 Server and client work flow chart
3.2 间歇通信策略
该无线通信系统在试运行期间,有时会出现通信延时的现象,对跑偏测试主系统的测试效率造成严重影响。为此,提出了一种间歇通信策略,当某个手持终端和测试主机之间不应该数据传输的时候,主动断开它们之间的TCP连接,这样不仅使得无线通信资源得到了合理的分配,而且明显降低了测试过程中可能出现的通信延时所带来的不利影响,使得系统在强干扰环境下的通信实时性和抗干扰能力大幅度提高[8]。
根据测试的具体流程,可将汽车行驶跑偏测试分为3个基本阶段:被测车辆的信息提取阶段、启动测试阶段和反馈测试结果阶段[9]。所采用的间歇通信策略的核心思想是,对于这3个基本阶段,当每个阶段开始时手持终端都要向测试主机发出连接请求,建立TCP连接,每个阶段结束时自动断开连接。
间歇通信策略具体如下:首先,测试人员利用手持终端扫描被测车辆VIN码,并与测试主机之间建立TCP连接,接着向测试主机发送VIN码。车辆VIN码发送成功后,测试主机立即断开与该手持终端的TCP连接,此即被测车辆的信息提取阶段。该阶段的外界干扰小,对实时性的要求稍微低些。当被测车辆行驶至规定的测试激活点时,手动按下“start”键,此时手持终端与测试主机之间只建立TCP逻辑连接而无数据传输,测试主机通过获取该手持终端的IP地址,调出此前经此IP发送的车辆VIN码,对被测车辆身份进行验证,并启动测试。之后,测试主机立即断开与该手持终端的TCP连接,以便腾出通信资源,分配给其他被测车辆上手持终端,此即启动测试阶段,该阶段的外界干扰大,而且对实时性的要求比较高。待跑偏测试完成后,测试主机重新建立起与该手持终端的TCP连接,将测试结果发送给手持终端并断开连接。间歇通信策略具体流程如图6所示。
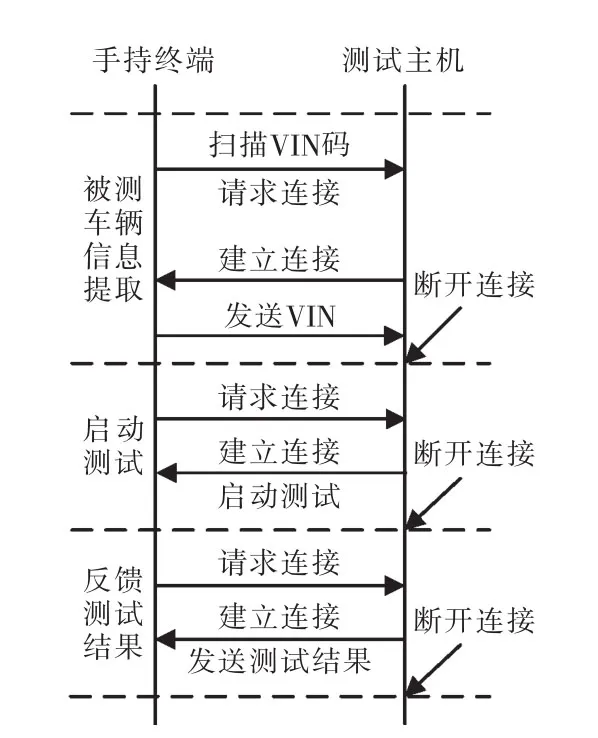
图6 间歇通信策略流程Fig.6 Flow chart of interval communication strategy
该间歇通信策略使得无线通信资源得到了合理的分配,大大降低了通信延时带来的影响,在强干扰环境下,通信时间从0.39 s降至0.04 s,测试系统的无效率从9%降到了1.2%,大大提高了系统的通信实时性和抗干扰能力。
3.3 ETC自启动通信策略
该套测试系统在实际应用过程中,存在着一个重要的问题:被测车辆到达测试激活点时,需测试人员手动按下手持终端的“start”键才能启动测试,而不是自动激活测试,这使测试人员的操作不够简便。实际测试中,出于对测试人员的安全考虑,需要先适当减速,再手动按下“start”键,而有些测试人员为了按键时不减速,在到达规定的测试激活点之前就提前按下“start”键,结果未能成功激活测试进而导致此次测试失败。另外,由于无线网络的问题,手动发送时有时会出现不能成功激活测试的现象。为此,必需改进通信方案,使车辆到达测试激活点时能够在不减速的情况下自动快速地激活测试。考虑到电子不停车收费系统ETC近年来发展迅速,可以把ETC技术运用到本套测试系统。
3.3.1 ETC的工作原理
当车辆进入到路测单元RSU信号覆盖的有效范围后,环路感应器就触发RSU采用专用短程通信技术DSRC与车载单元电子标签OBU进行通信,RSU从OBU中获取的车辆信息包括车辆标识、用户IC卡的账户信息等,将所得到的信息通过微波传输发送到车道控制系统,该系统再对收到的信息进行计算分析[10-12]。
3.3.2 ETC自启动通信策略
将路侧设备RSU安装在测试激活点,当带有OBU的车辆进入RSU的信号覆盖范围内后,OBU接收到RSU发来的询问信号而被激活进入工作状态,此时RSU接收到OBU发来的激活测试信号,立即与测试主机建立起逻辑连接,启动测试主程序。在这个过程中,RSU并没有向测试主机发送任何数据信息,仅仅是与其建立起连接,激活测试,测试完成后将测试结果发送到手持终端上。
可见,整个激活测试的过程是自动完成的,不需要测试人员减速并手动按下“start”键,这样测试人员可以专注于将方向盘摆正并按照规定车速进入测试区,大大提高了测试效率及测试稳定性。
4 结语
基于激光测距的汽车行驶跑偏测试系统,精度高、成本低、结构简单、安装调试方便,能够较好地满足汽车厂商对下线车辆跑偏测试的需求。无线通信系统的实时性和可靠性是该测试系统有效运行的前提,所提出的3种通信策略使得无线通信系统的实时性和抗干扰能力均有所增强,从而提高了测试系统的测试效率和可靠性,同时该无线通信系统也可用于其他类型的汽车户外测试项目中。
[1]周兴林,李程,刘汉丽,等.基于双目视觉的车辆行驶跑偏在线自动检测系统[J].中国机械工程,2015,26(1):130-134.
[2]He Y H,Yang C,Shang B.Vehicle driving wandering test system based on LabVIEW[C]//SAE Technical Paper 2010-01-0998,2010.
[3]荣锐兵,严运兵,方园,等.基于激光测距的车辆行驶跑偏测量系统[J].公路与汽运,2012,28(3):5-7.
[4]何耀华,厉晓飞.基于近景摄影测量技术的汽车跑偏测试系统构建[J].中国工程机械学报,2011,9(4):476-481.
[5]陈长军,王刚,刘勇,等.基于数字图像的车辆行驶跑偏在线测量方法[J].测绘科学,2014,39(9):102-106.
[6]何耀华,王超敏.汽车道路动态测试系统通信技术研究[J].山东交通学院学报,2011,19(1):18-20.
[7]陈棵明,何耀华.基于C#的汽车测试系统无线通讯模块的设计[J].农业装备与车辆工程,2010,48(6):33-35.
[8]GhosalA,Bai F,Debouk R,et al.Reliability and safety/Integrity analysis for vehicle-to-vehicle wireless communication[C]//SAE Technical Paper 2011-01-1045,2011.
[9]Zhou Z T,He Y H,Wang D.Research on wireless communication strategy in online automatic test system for vehicle driving wandering[C]//SAE Technical Paper 2015-26-0236,2015.
[10]许菲,李新友.ETC系统中车载单元的研究与设计[J].武汉理工大学学报:交通科学与工程版,2011,35(5):1049-1057.
[11]Yan C J,Guo J X,Li X Y.The design and realization of OBU in free-flow ETC system[J].Applied Mechanics and Materials,2014:2081-2084.
[12]崔洪军,崔姗,李亚平,等.高速公路收费站ETC车道通行能力研究[J].中外公路,2014,34(6):278-281.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
西安航空学院学报(2021年1期)2021-07-24
科学家(2021年24期)2021-04-25
法制博览(2020年36期)2020-11-30
现代装饰(2020年8期)2020-08-24
电子制作(2019年13期)2020-01-14
电子制作(2018年23期)2018-12-26
电脑知识与技术(2017年31期)2017-12-11
销售与市场·渠道版(2017年2期)2017-03-09
婚姻与家庭·性情读本(2015年7期)2015-07-21
