
混合动力汽车工况识别自适应能量管理策略
2018-01-12 04:25邓涛罗俊林韩海硕汪明明程栋
西安交通大学学报 2018年1期
邓涛, 罗俊林, 韩海硕, 汪明明, 程栋
(1.重庆交通大学机电与车辆工程学院, 400074, 重庆; 2.重庆交通大学城市轨道交通车辆系统集成与控制重庆市重点实验室, 400074, 重庆)
混合动力汽车工况识别自适应能量管理策略
邓涛1,2, 罗俊林1, 韩海硕1, 汪明明1, 程栋1
(1.重庆交通大学机电与车辆工程学院, 400074, 重庆; 2.重庆交通大学城市轨道交通车辆系统集成与控制重庆市重点实验室, 400074, 重庆)
为改善传统等效燃油消耗最低策略(ECMS)在真实复杂路况下的控制效果,以并联混合动力汽车为研究对象,提出了一种依据工况变化在线调整等效因子的自适应等效燃油消耗最低(A-ECMS)控制策略。首先,提取差异化显著的工况特征参数,采用聚类分析方法来完成工况分类,构建典型工况库,计算出各典型工况对应的最优等效因子;然后,采用学习向量量化(LVQ)神经网络设计了工况识别器,经充分训练后识别器准确率达到98.8%;最后,在线采集选定的车辆行驶特征参数,将当前实际工况识别为典型工况库中某一种,采用对应典型工况下的最优等效因子作为当前优化输入,建立了基于工况识别的A-ECMS控制策略。仿真结果表明:与ECMS相比,在单一给定工况下,A-ECMS燃油经济性降低了0.8%,而电池组荷电状态(SOC)提高了0.13%,能取得近似优化效果;在多工况联合工况下,燃油经济性提高了4.18%,且SOC波动减小了43.26%,证明了A-ECMS控制策略的优越性。
混合动力汽车;能量管理;工况识别;自适应;等效燃油消耗最低策略
能量管理策略是混合动力汽车实现节能减排的关键技术,而行驶工况对能量管理策略的控制效果有显著影响。若能够准确获取汽车未来行驶工况,就能够采用优化算法获取最优解,但车辆实际行驶工况是随机的,因此工况的在线预测、识别对能量管理的开发十分重要。
一类研究主要利用GPS、ITS获得驾驶循环的信息,对已知路径下的能量管理进行优化,从而实现降低油耗的目的[1-4],但需要依靠硬件系统、智能交通系统及外部通讯支持,应用范围受较大限制;另一类研究基于车辆行驶的历史数据,采用预测算法对工况进行预测,主要有基于马尔科夫链随机预测算法,结合模型预测控制、动态规划能量管理策略[5-6],此类研究虽存在工况适应性不强、计算量较大、实时性一般等不足,但无需外部设备支持,且理论上可获得接近最优控制效果,得到了诸多学者的青睐。
此外,还有研究人员应用模糊控制器[7-8]、人工神经网络[9]和支持向量机[10]等对工况进行识别,虽提高了燃油经济性,但参数选取较少,工况分类准确性不高;也有学者采用k-means[11]、随机预测[12]等算法,针对某特定地域或某标准循环工况进行预测或识别[13-15],然而工况分类较少,不同工况优化参数差别较大。
为构建代表性强、适用性广的典型行驶工况库,本文选取16种标准工况作为基础样本,综合涵盖高速、市郊、市内及复杂的混合工况等,采用统计方法优化特征参数的选取,聚类分析将16种工况减少为6种典型工况,并结合瞬时优化策略ECMS离线计算得到对应工况的最优油耗转换系数。采用LVQ设计工况识别器,将实际行驶工况对应为典型工况的某一种,实现工况在线识别,将当前识别工况的最优油耗转换系数作为当前优化输入,提出了基于工况识别的自适应等效燃油消耗最低策略,并在单一和多工况下仿真分析。
1 整车建模
1.1 整车布置及参数
以某并联式混合动力汽车作为研究对象,结构如图1所示。整车整备质量为1 565 kg,最高车速160 km/h,电机选用永磁同步电机,其额定功率为65 kW,额定电压240 V,最高转速10 000 r/min,发动机为1.4 L自然吸气发动机,峰值功率为65 kW,最高转速为5 700 r/min,发动机、电机与转矩耦合器之间的传动比为分别为1、1.734;电池选用动力锂电池,容量为14 A·h,电压290.5 V,变速器采用6挡机械自动变速箱(AMT)。

图1 并联混合动力汽车结构示意图
1.2 关键部件建模
结合台架实验数据,建立发动机数值模型
(1)
(2)
Pfc(Te(t),ωe(t))=Fkw(Te,ωe)ηfc(Te(t),ωe(t))
(3)
ηfc(Te(t),ωe(t))=Feff(Te,ωe)
(4)
式中:Te为发动机扭矩;Mspd=1为发动机处于转速控制模式;ωcmd为发动机的目标转速;Tint(ωcmd)为发动机维持在ωcmd下需要的初始扭矩;Pspd为发动机处于转速控制模式时,对初始扭矩Tint(ωcmd)修正的比例-积分函数;mef为发动机燃油消耗率;Pfc(Te(t),ωe(t))为当前有效功率;ηfc(Te(t),ωe(t))为当前发动机效率。
电机特性可描述为
Tm,min=fm,min(ωm);Tm,max=fm,max(ωm)
(5)
Tm∈[Tm,minTm,max]
(6)
ηm=fm,map(Tm,ωm)
(7)
(8)
Ib=Pb/Vb
(9)
式中:Tm,min、Tm,max分别为电机最小、最大扭矩;fm,min(ωm)为电机制动转矩特性查表函数;fm,max(ωm)为电机驱动转矩特性查表函数;ηm是电机效率;fm,map为电机效率函数;Ib为电池组输出电流;Pb为输出功率;Vb为端电压。
采用电池内阻模型对电池进行建模,即
Vb,oc=NbFb,voc(x)
(10)
Rb=NbFR,b(x)
(11)
Vb=Vb,vocIb(x)Rb
(12)
(13)
式中:Fb,voc(x)、FR,b(x)分别为单体电池的开路电压、内阻,二者均为电池组荷电状态(SOC)的查表函数;Nb为电池组当中单体电池串联数;Rb、Vb,voc分别为电池组的内阻、开路电压;Ib为电池电流,一般情况下,充电电流为正,放电电流为负;xb为SOC;xb,0为初始SOC;Cb为电池容量。
2 等效燃油消耗最低ECMS策略
ECMS通过一个等效因子将当前电量消耗等效为燃油消耗,从而将全局优化转化为瞬时优化[16]。然而,传统ECMS不能很好地控制SOC平衡,需要进行SOC修正,采用文献[17]提出的惩罚函数概念建立电池电量维持策略,建立ECMS目标优化函数
(14)
fs(Δs)=1+aΔs3+bΔs4
(15)
(16)
式中:meq(t)为车辆总燃油消耗量;mfc(t)为发动机的燃油消耗量;ηmc,dis为电机驱动效率;ηmc,chg为电机发电效率;当pmc(t)≥0,γ=1代表驱动;pmc(t)<0,γ=0代表发电;sdis为放电等效因子;schg为充电等效因子;fs(Δs)为惩罚函数;a、b均为经验系数,本文取值为1、0.2;Δs为标准化的SOC偏差;xb,h为电池SOC的最高限值;xb,l为电池SOC的最低限值。
ECMS策略需要满足以下约束条件
(17)
式中:Treq为需求扭矩;Tm为电机扭矩;Te为发动机扭矩;Tm_min、Tm_max分别为电机当前转速下最小、最大扭矩;Te_min、Te_max分别为发动机当前转速下最小、最大扭矩。
3 工况在线自适应识别
3.1 工况分类
3.1.1 特征参数分析和提取 为了正确识别行驶条件,需要谨慎选择工况特征参数的数量。如果特征数目太多,会加重计算负担;特征参数太少则难以全面表征特定行驶循环的特点。通过对代表工况样本的统计特征值进行分析,得到能很好表征工况特点的参数,以此对工况进行分类和构建工况识别算法。由于循环工况作为样本数量较少,无法为基于统计学方法的特征参数研究提供足够数据和论证。将工况Cn以1 s为间隔,划分为n个阶段,以此形成时间序列{Cn},随机选择起点n0=random(0,1,2,…,n-1),以工况时长ts对时间序列{Cn}进行截断ci=Cn0+i,i=1,2,3…,ts,n0+i≤n。

图2 不同工况样本平均车速统计直方图
考虑计算量和信息包含的完整性,初选取样本工况时间窗长度ts为160 s。以纽约工况NYCC、城市工况UDDS和高速工况US06这3种标准工况为例,分别创建300个样本,并对这300个样本的各特征参数绘制统计直方图。以平均车速为例,不同工况样本平均车速统计直方图如图2所示。由图2可知,不同工况样本之间的平均车速较集中,相互间也有明显差异,说明区分度较好。对其他特征逐一分析,最终得到的特征参数包括:平均车速、最高车速、平均加速度、最大加速度、平均减速度、最大减速度以及停车时间。
3.1.2 行驶工况聚类分析 要实现工况识别,首先需要构建目标工况库。为构建代表性强、适用性广的典型工况库,选取多国发布的16种标准循环工况作为基础样本,综合涵盖高速、市郊、市内及复杂的混合工况等。考虑到车辆工作状态频繁切换时性能较差,采用聚类方法对16种工况进行分类,以减少工况识别目标数量,同时保证典型工况的代表性。
在分类开始前,先建立分类对象集合X(16个标准循环工况)上的模糊相似关系R″=[rij]mn,其中0≤rij≤1,i,j=0,1,2,…,n,rij为xi、xj的相似程度。采用夹角余弦法计算相似性统计量
(18)
在实际运用中,由于工况特征参数单位不一,数值差距较大,需要把各个原始数据进行标准化。首先计算每一维特征的均值和方差
(19)
求各数据的标准化值
(20)
采用极值标准化将式(20)压缩在[0,1]区间内
(21)

由此得到待分类对象集X上定义的模糊相似性关系,根据其自反性和对称性,构造传递闭包,进行合成运算,将其改造为模糊等价关系
(22)


3.2 工况在线自适应识别算法
3.2.1 学习向量量化(LVQ)神经网络训练 考虑到模式识别、数值优化、数据压缩等方面,采用LVQ神经网络[14-15]来设计识别器。对应选定的行驶工况特征,该神经网络有9个输入、6个输出(分别为6种代表工况的类别编号)。将总样本库分成3块,其中70%用作训练样本,15%用作验证样本,15%用作测试样本。经过多次按照不同训练参数对设计的神经网络进行训练,选择效果较好的一组参数,中间层为11个神经元,学习速率为0.01,采用算法为LVQ1,最大代数为80,神经网络收敛曲线如图3所示。

图3 LVQ神经网络收敛曲线
神经网络从第1代训练开始,误差急速缩小,当训练到第61代时取得最优化误差0.033 75。测试样本识别的综合准确率达到96.7%,总样本空间的综合识别率达到98.8%,可满足工况识别的需要。
3.2.2 识别分析 为了验证车辆实际行驶工况的识别效果,选取6种典型工况,按照随机顺序首尾相接,共有720种组合。本文选取“UDDS+US06+NEDC+FTP+NYCC+HWFET”作为实际行驶循环工况。每200 s采集一次工况各特征参数,所得工况识别结果如图4所示。

图4 车辆实际行驶工况识别结果
由于识别系统使用历史数据来预测下一个小工况的分类,所以对于第1个200 s,考虑汽车实际使用场景,第1个时间段包含了车辆起动和驶入道路,所以采用直接赋值的方法,强制使用欧洲城市循环工况下优化的等效因子作为优化输入。由于工况特征参数采用了较多的速度和加速度相关参数,所以识别器对速度值和加减速度的变化较为敏感,对于某些车速剧烈变化区域,识别器准确率有所下降,但识别混淆的工况,两者特征参数相近,对应的最优等效因子差距并不明显。
缩短识别周期对氢电车辆综合控制提高有较大帮助,但是过于细化周期需要更复杂的计算,受限于硬件计算速度,加上频繁切换等效因子参数会导致车辆动力部件工况变化剧烈,所以选择一个合适的识别时间间隔就变得尤为重要,综上考虑,本文最终选择时间截断间隔为200 s。
4 自适应等效燃油消耗最低A-ECMS策略
4.1 A-ECMS控制策略
结合工况识别算法与ECMS,建立自适应等效燃油消耗最低A-ECMS控制策略,控制策略示意图如图5所示。

图5 A-ECMS控制策略示意图
针对选定的6种典型循环工况,应用ECMS算法计算得到对应工况下的最优等效因s1,s2,…,s6,结果如表1所示。根据车辆行驶工况的历史数据,利用工况识别系统计算工况特征参数,输入到工况识别模型中,将当前行驶工况依据贴近度识别为6种典型循环工况中的某一个进行输出。根据工况识别结果选择对应工况的最优等效因子作为ECMS算法的当前等效因子,用于计算最优扭矩分配,从而优化电机和发动机工作点。

表1 ECMS优化的典型工况等效因子
4.2 仿真分析
4.2.1 单工况仿真分析 考虑短距离运行下的容错率,在NEDC工况下,进行工况模式识别,结果如图6所示。
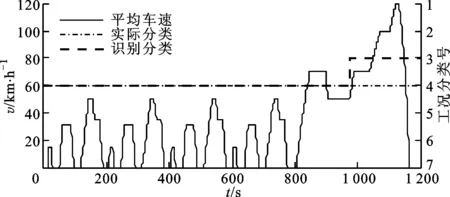
图6 NEDC工况识别结果
工况开始后前4个ECE循环,识别较为准确,从1 000 s到1 185 s时间段内,识别使用的是800 s到1 000 s的历史数据,错误识别为第3类(UDDS)工况,而此时车辆正处于高速,理论上即使用NEDC下的等效因子也无法达到此时间间隔内最优,所以此段容错率应更高,仿真结果也证明了该结论。

图7 NEDC工况ECMS和A-ECMS的SOC对比图
对比分析A-ECMS与传统ECMS控制策略所得的SOC效果,结果如图7所示。由图7可知,两种策略下,xb相差为0.13%,燃油经济性的差为0.8%,对比其余几种典型工况,均得到相似结果。这说明A-ECMS控制策略在单工况下能取得接近于ECMS控制策略的良好优化效果,同时也证明了对部分时间间隔区段即使识别错误,A-ECMS控制策略也有足够的容错率。
4.2.2 多工况联合仿真分析 为了验证复杂多变行驶工况下的实际效果,随机选择组合工况UDDS+US06+NEDC+FTP+NYCC+HWFET作为假设实际工况,仿真比较ECMS和A-ECMS,SOC对比如图8所示。

图8 多工况ECMS和A-ECMS的SOC对比图
对于工况开始200 s时,由于缺乏历史数据,本文统一使用NEDC工况下的等效因子作为优化输入。第200 s后,模式识别器开始使用第一个历史200 s数据作为识别样本进行在线识别,此时A-ECMS策略将工况识别为UDDS,车速较高情况下开始进行微充电,而ECMS策略一直将工况看作欧洲城市工况NEDC,市区工况内车速较低,策略倾向于电机驱动,所以电池SOC快速下降。第1 800 s后车辆进入NEDC工况,A-ECMS策略将其识别为城市工况,策略倾向于电机驱动,降低油耗,而此时ECMS策略下虽是最优等效因子,但车辆SOC较低,已进入电量保持阶段,导致油耗偏高,二者SOC变化差别较大。总体上,A-ECMS策略下SOC波动更平缓,表明动力部件工作状态切换更为平滑。FTP和NYCC工况下,二者表现较为相近:FTP工况电量维持;NYCC工况倾向于电机驱动。HWFET工况段,A-ECMS策略电量充足,倾向于稳定维持,而ECMS策略经过上一工况段的放电,此时进入快速充电模式。

图9 多工况ECMS和A-ECMS电机扭矩对比图

图10 多工况ECMS和A-ECMS发动机扭矩对比图
电机、发动机扭矩对比如图9、10所示。市内低速工况段,A-ECMS策略使得电机提供更多辅助扭矩,避免发动机工作在恶劣区域;同时电机发电时间更多,有利于电池电量的维持。从全过程看,发动机输出的峰值扭矩有所下降,发动机工作区间波动明显降低,对油耗和排放有改善。多工况下,采用A-ECMS策略得到电机和发动机工作点分布如图11、12所示,电机和发动机工作点大部分时间都维持在高效率区域。
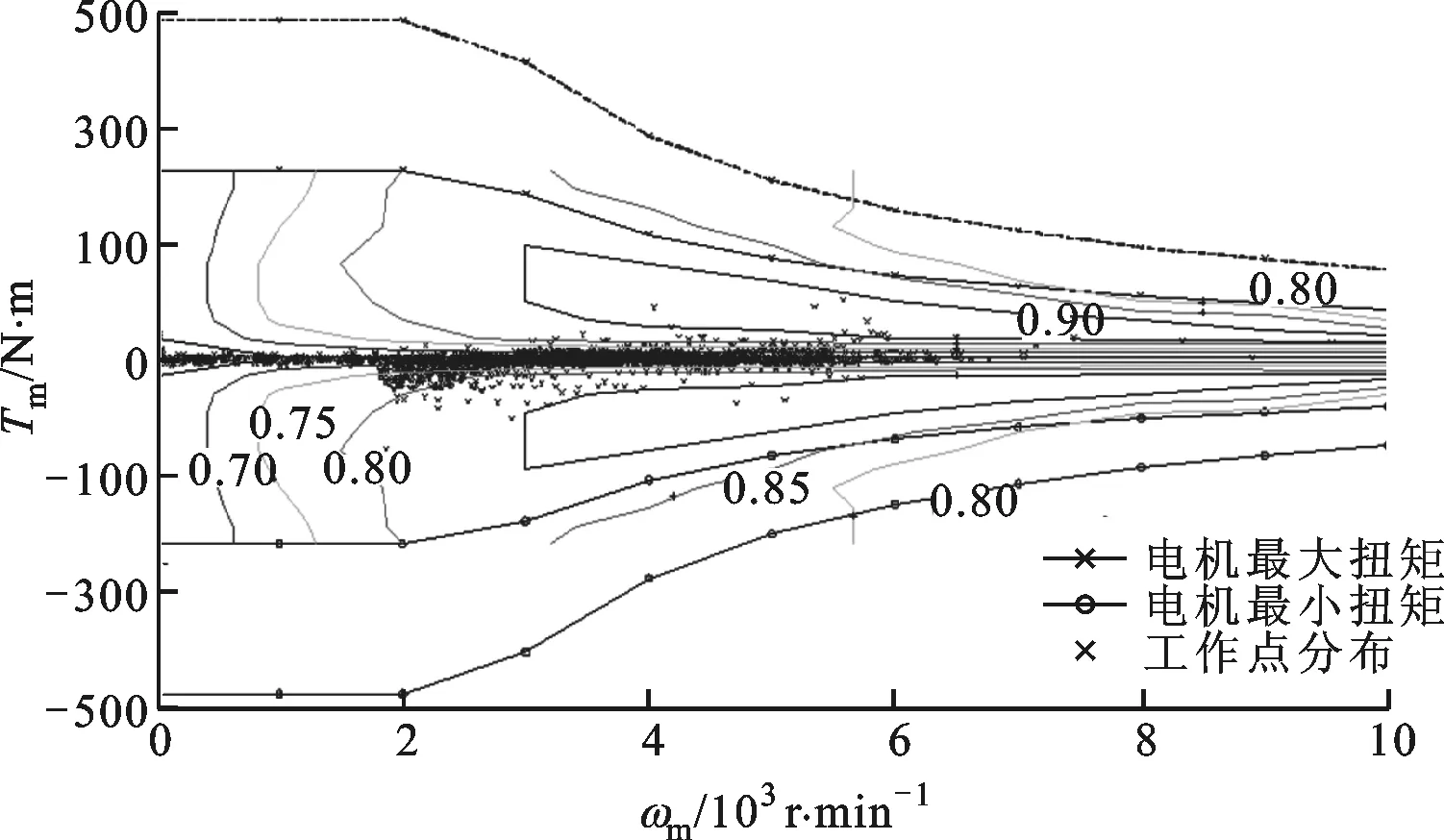
图11 多工况A-ECMS电机工作点效率分布图

图12 多工况A-ECMS发动机工作点效率分布图
整个多工况下对A-ECMS与ECMS进行综合对比,由结果可知,采用A-ECMS策略后,百公里燃油消耗降低4.18%,SOC终值增加8.39%,SOC峰谷值波动减少了43.26%。
5 结 论
(1)运用统计直方图筛选用于工况识别所需差异化显著的9个特征参数,采用聚类分析方法将样本工况库的16种标准行驶工况按照贴近度和相似性分为了6种典型代表工况。
(2)结合LVQ工况识别算法与传统ECMS控制策略,建立了基于工况识别的自适应等效燃油消耗最低A-ECMS控制策略。
(3)对比分析单工况和多工况下A-ECMS和传统ECMS控制策略,结果表明:单工况下A-ECMS具有接近ECMS策略的效果;多工况下,A-ECMS具有良好的工况自适应能力,且燃油经济性提升了4.18%,SOC降低了8.39%,SOC峰谷波动降低了43.26%,显示出良好的节油控制效果。
[1] HE Y, RIOS J, CHOWDHURY M, et al. Forward power-train energy management modeling for assessing benefits of integrating predictive traffic data into plug-in-hybrid electric vehicles [J]. Transportation Research: Part D Transport & Environment, 2012, 17(3): 201-207.
[2] MARANO V, RIZZONI G, TULPULE P, et al. Intelligent energy management for plug-in hybrid electric vehicles: the role of ITS infrastructure in vehicle electrification [J]. Oil & Gas Science & Technology, 2012, 67(4): 575-587.
[3] WEN Y, LU Y, YAN J, et al. An algorithm for license plate recognition applied to intelligent transportation system [J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(3): 830-845.
[4] LARSSON V, JOHANNESSON L, EGARDT B, et al. Benefit of route recognition in energy management of plug-in hybrid electric vehicles [C]∥IEEE American Control Conference. Piscataway, NJ, USA: IEEE, 2012: 1314-1320.
[5] RIPACCIOLI G, BERNARDINI D, CAIRANO S D, et al. A stochastic model predictive control approach for series hybrid electric vehicle power management [C]∥IEEE American Control Conference. Piscataway, NJ, USA: IEEE, 2010: 5844-5849.
[6] LI L, YOU S, YANG C. Driving-behavior-aware stochastic model predictive control for plug-in hybrid electric buses [J]. Applied Energy, 2015, 162(1): 868-879.
[7] LI X, ZHAO K, YANG Y. Expert system for bus styling evaluation based on neural network and feature extraction [C]∥IEEE International Conference on Computer Science and Information Technology. Piscataway, NJ, USA: IEEE, 2010: 506-510.
[8] MONTAZERI-GH M, MAHMOODI-K M. Optimized predictive energy management of plug-in hybrid electric vehicle based on traffic condition [J]. Journal of Cleaner Production, 2016, 139(1): 935-948.
[9] FENG T, LIN Y, GU Q, et al. A supervisory control strategy for plug-In hybrid electric vehicles based on energy demand prediction and route preview [J]. IEEE Transactions on Vehicular Technology, 2015, 64(5): 1691-1700.
[10] ZHANG X, WU G, DONG Z, et al. Embedded feature-selection support vector machine for driving pattern recognition [J]. Journal of the Franklin Institute, 2014, 352(2): 669-685.
[11] MONTAZERI-GH M, FOTOUHI A. Traffic condition recognition using the k-means clustering method [J]. Scientia Iranica, 2011, 18(4): 930-937.
[12] OPILA D F. Uncertain route, destination, and traffic predictions in energy management for hybrid, plugin, and fuelcell vehicles [C]∥IEEE American Control Conference, Piscataway, NJ, USA: IEEE, 2016: 1685-1692.
[13] 李晓甫. 桥间分配四驱混合动力电动汽车能耗优化控制策略研究 [D]. 广州: 华南理工大学, 2012.
[14] 邓涛, 卢任之, 李亚南, 等. 基于LVQ工况识别的混合动力汽车自适应能量管理控制策略 [J]. 中国机械工程, 2016, 27(3): 420-425.
DENG Tao, LU Renzhi, LI Yana, et al. Adaptive energy control strategy of HEV based on driving cycle recognition by LVQ algorithm [J]. China Mechanical Engineering, 2016, 27(3): 420-425.
[15] WANG R, LUKIC S M. Review of driving conditions prediction and driving style recognition based control algorithms for hybrid electric vehicles [C]∥IEEE Vehicle Power and Propulsion Conference. Piscataway, NJ, USA: IEEE, 2011: 1-7.
[16] PAGANELLI G, GUERRA T M, DELPRAT S, et al. Simulation and assessment of power control strategies for a parallel hybrid car [J]. Proceedings of the Institution of Mechanical Engineers: Part D Journal of Automobile Engineering, 2000, 214(7): 705-717.
[17] PAGANELLI G, ERCOLE G, BRAHMA A, et al. General supervisory control policy for the energy optimization of charge-sustaining hybrid electric vehicles [J]. JSAE Review, 2001, 22(4): 511-518.
AdaptiveEnergyManagementStrategyBasedonDrivingCycleIdentificationforHybridElectricVehicles
DENG Tao1,2, LUO Junlin1, HAN Haishuo1, WANG Mingming1, CHENG Dong1
(1. School of Mechantronics & Vehicle Engineering, Chongqing Jiaotong University, Chongqing 400074, China; 2. Chongqing Key Laboratory of System Integration and Control for Urban Rail Transit Vehicle, Chongqing 400074, China)
To improve the control performance of traditional equivalent fuel consumption minimum strategy (ECMS) under the real complex road conditions, an adaptive equivalent consumption minimum strategy (A-ECMS) of energy management was proposed for a parallel hybrid electric vehicle, which can adjust the equivalent factor online according to the change of driving cycle. The significantly different characteristic parameters of driving cycle were extracted by statistical method. The driving cycles were classified with cluster analysis method, and the database of typical driving cycles was constructed. Then, the optimal equivalent factor for each typical driving cycle can be calculated. A recognizer of driving cycles was designed by learning vector quantization method, and its accuracy of recognization was proved up to 98.8%. The actual driving condition was identified to be one of the typical driving cycles by the recognizer, and the corresponding optimal equivalent factor was adopted as the optimization input of ECMS. Thus, the A-ECMS control strategy based on the driving condition online identification was established. The simulation results show that the optimization effect of A-ECMS is similar to ECMS under the given single cycle, the fuel economy of A-ECMS is decreased by 0.8% and SOC increased by 0.13%. Under the multi-driving cycles, the fuel economy of A-ECMS strategy is improved by 4.18%, and the fluctuation of SOC is reduced by 43.26%, which can prove the superiority of the A-ECMS.
hybrid electric vehicle; energy management; driving cycle identification; adaptive; equivalent consumption minimum strategy
2017-06-03。 作者简介: 邓涛(1982—),男,教授,硕士生导师。 基金项目: 国家自然科学基金资助项目(51305473);中国博士后科学基金资助项目(2014M552317);重庆市博士后研究人员特别资助项目(xm2014032)。
时间: 2017-11-06
网络出版地址: http:∥kns.cnki.net/kcms/detail/61.1069.T.20171106.1409.008.html
10.7652/xjtuxb201801012
U469.72
A
0253-987X(2018)01-0077-07
(编辑 赵炜 苗凌)
猜你喜欢
能源工程(2022年2期)2022-05-23
现代电力(2022年2期)2022-05-23
空间科学学报(2020年1期)2021-01-14
装备制造技术(2020年2期)2020-12-14
中国交通信息化(2019年12期)2019-08-13
消费导刊(2018年10期)2018-08-20
制造技术与机床(2017年11期)2017-12-18
凿岩机械气动工具(2017年3期)2017-11-22
中国交通信息化(2017年8期)2017-06-06
山东工业技术(2016年15期)2016-12-01
