地对空雷达干扰系统有源无源联合发现概率
2018-01-12 06:54,,,
探测与控制学报 2017年6期
,, ,
(解放军电子工程学院,安徽 合肥 230037)
0 引言
现代高技术战争中,空袭扮演着重要的角色,它给具有重要政治、经济、军事价值的目标要地带来了巨大威胁。现代高技术空袭呈现出对电子信息系统高度依赖的特点。而正是基于这特点,地对空雷达干扰系统(以下简称:系统)可以对来空袭兵器的雷达进行干扰,压制或削弱其效能发挥,从而有效掩护要地。而系统的干扰站要干扰来袭目标,首先其侦察部分要能侦察发现目标。侦察发现目标的能力一般用发现概率这一指标来衡量。
文献[1-2]研究了防空联合探测有源雷达网对目标的发现概率,但未考虑有源侦察和无源侦察联合的情况。文献[3-4]探讨了集雷达和无源雷达侦察一体的网络雷达对抗系统的发现概率,但没有考虑有源侦察与无源侦察之间的指示情形。并且绝大部分文献计算发现概率的模型不完整,只研究了侦察搜索发现过程中的某一段的发现概率[5-6]。本文针对上述问题,结合搜索论[7-8],提出了地对空雷达干扰系统有源无源联合发现概率。
1 系统探测规律
地对空雷达干扰系统对来袭目标雷达的侦察场景示意图如图1所示。系统主要包括有源目标指示雷达和若干侦干一体干扰站,其中干扰站的侦察部分是无源侦察。系统在探测目标的时候,若有源目标指示雷达发现目标,可以将目标方位信息传输给干扰站,干扰站的无源侦察部分在指示下搜索侦察目标。这样,可以兼顾有源侦察和无源侦察的优点,并且有效提高干扰站侦察搜索效率。
2 系统有源无源联合发现概率模型
2.1 有源雷达指示成功的概率
2.1.1有源雷达探测的基本过程
有源雷达在进行目标搜索时,基本的过程是划定搜索空域,然后通过雷达的扫描使波束覆盖搜索空域,与目标发生接触,以探测与识别目标。由上述的过程可知,目标指示雷达发现目标的发现概率取决于以下几点:
1)目标落入搜索区域的概率Pl;
2)目标与雷达波束发生接触的规律;
3)接触条件下,雷达发现目标的概率Pdi。
2.1.2目标落入搜索区域的概率
目标落入搜索区域的概率Pl在许多情况下可取1,但有些情况下,按上级指示搜索目标,由于存在各种观测误差与随机扰动,所指示的目标位置不能准确无误,这时按所指示的目标位置确定的搜索区域不一定能覆盖住目标,即Pl小于1。
2.1.3目标与雷达波束发生接触的规律
雷达搜索目标时的扫描方式尽管多样,但按照其与目标发生接触的规律可分为随机型和确定型两类。随机型即雷达在一段搜索时间内与目标发生接触的次数为随机变量;确定型即雷达在一段搜索时间内与目标发生接触的次数是确定的数。目标指示雷达一般采用圆周扫描方式,属于确定型搜索。假设目标指示雷达的扫描周期为T,则一段搜索时间t内,雷达波束与目标发生接触的次数为:

(1)
2.1.4接触条件下的发现概率
目标指示雷达搜索运动目标属于慢起伏情形,则在某次雷达波束与目标接触时的发现概率为[9]:
(2)


(3)
式中,θ0.5为雷达天线半功率波束宽度;Ω为雷达天线扫描角速度;fr为雷达脉冲重复频率。
由以上分析可知,目标指示雷达在搜索时间t内的发现概率为:
(4)
假设不考虑目标指示雷达与干扰站之间信息传输的损耗性,即认为目标指示雷达获得的信息能正确无误地传输给各个干扰站,P传输=1。则目标指示雷达在时刻t对干扰站进行方位指示成功的概率为:
(5)
2.2 无指示下干扰站系统的发现概率
在无目标指示雷达指示的情况下,干扰站的无源侦察接收机要搜索发现目标雷达信号同样地需要满足以下几点:
1)目标雷达信号落入搜索区域;
2)侦察接收机与目标雷达信号发生接触;
3)接触条件下,侦察接收机检测发现雷达信号。
目标雷达信号落入搜索区域的概率Pl与前文类似,这里不再赘述。下面阐述侦察接收机与雷达信号的接触概率和接触下侦察接收机发现概率。
2.2.1侦察接收机与雷达信号发生接触的概率
无源侦察接收机要与目标雷达信号发生接触,需要在时域、空域和频域都与目标雷达信号发生重合。由于在实际工作中无源侦察接收机与目标雷达信号都存在空域、频域和时域的动态相互不确定性。利用多重搜索窗口函数[10-11]的概念可以准确地描述该种不确定性,因此引入窗口函数模型来计算接触概率。只有当各列窗口同时发生重合,才认为无源侦察接收机与目标雷达信号发生接触,根据侦察接收机与雷达信号发生接触的过程将窗口函数描述为以下几类:
1)侦察接收机方向搜索窗口

式中,Tr为侦察机天线扫描周期;θr为侦察天线波束宽度;θ1是侦察机需要搜索的角度范围。
2)目标雷达方向搜索窗口

式中,Ta为雷达天线扫描周期;θa为雷达天线波束宽度;θ2为雷达天线扫描的角度范围。
3)侦察接收机频域搜索窗口
式中,Tf为干扰站侦察部分频率搜索周期;f2-f1为侦察频段;Δfr为侦察机瞬时带宽。
4)目标雷达信号脉冲窗口
T4=Tre
τ4=τre
式中,Tre为目标雷达的脉冲重复周期;τre为目标雷达脉冲宽度。
于是,无源侦察接收机与目标雷达信号在某一时刻发生接触的概率为这四列窗口重合的概率,即:
(6)
某一瞬时的接触概率没有太大意义,需要将其置于一段时间内考虑。假设干扰站的无源侦察接收机搜索时间为t。由于各次接触事件符合独立、无后性,可以将发生接触事件的次数看作一个随时间增长的独立增量过程,故可以采用强度为λ的泊松过程来进行描述。其中,λ是单位时间内接触事件发生的平均次数。根据泊松过程的性质,在搜索时间t内发生k次接触的概率为:
(7)
2.2.2接触下的发现概率
无源侦察接收机在与目标雷达信号接触的过程中可以接收到多个雷达脉冲,因此一般采用脉冲积累检测方法。由文献[9]可知,接触条件下,侦察接收机对目标雷达信号的发现概率为:
(8)
式中,SN为单个雷达脉冲的信噪比;n为接触时间Δt内雷达脉冲积累数,n=Δt·fr,fr为目标雷达脉冲重复频率;y0为侦察接收机恒虚警时的检测门限。
由以上分析可知,单个干扰站m的无源侦察接收机在时刻t对目标雷达信号的发现概率为:
(9)
假设地对空雷达干扰系统有M个干扰站,各个干扰站与信息中心连接畅通,即认为至少有一个干扰站能发现目标,整个干扰站系统就发现目标。则根据“秩K”规则干扰站系统在没有目标指示雷达指示的情形下,在时刻t对目标雷达信号的发现概率为:
(10)
2.3 指示下干扰站系统的发现概率
当目标指示雷达发现目标后,可以将目标的方位信息通过信息中心传输给各个干扰站,各干扰站的侦察接收机在接到指示后对指定方位进行搜索。假设目标指示雷达在t0时刻将目标方位信息传输给各干扰站,并其方位指示精度为Δθ,Δθ≪θ1。则干扰站的侦察接收机方向搜索窗口修正为:

式中其他参数的含义与上文相同。则相应的,侦察接收机与雷达信号发生接触的概率可以修正为:
(11)
在搜索时间t内发生k次接触的概率为:

(12)
按照上一节相同的思路,可以得到干扰站系统在目标指示雷达的指示后,在时刻t(t>t0)对目标雷达信号的发现概率为:
(13)
则在有指示雷达指示的情形下,干扰站系统在时刻t的发现概率为:
(14)
2.4 系统联合发现概率
地对空雷达干扰系统的干扰站系统发现目标雷达的情形有两种:无指示独立探测下发现目标雷达和目标指示雷达指示成功下发现目标雷达 。只要有一种情形能发生,就认为干扰站系统发现目标雷达。则结合概率论的思想,系统在t时刻发现目标雷达的有源无源联合发现概率为:
P=1-(1-PUGD(t))·(1-PG(t0)PGD(t))
(15)
将式(5)、式(10)、式(14)代入式(15)即可算出联合发现概率。
3 仿真实例
假设地对空雷达干扰系统有一部目标指示雷达和四部侦、干一体干扰站,部署方式如图1。以美军“F-15”机载雷达为作战目标。目标指示雷达和干扰站的侦察接收机参数分别如表1和表2所示。
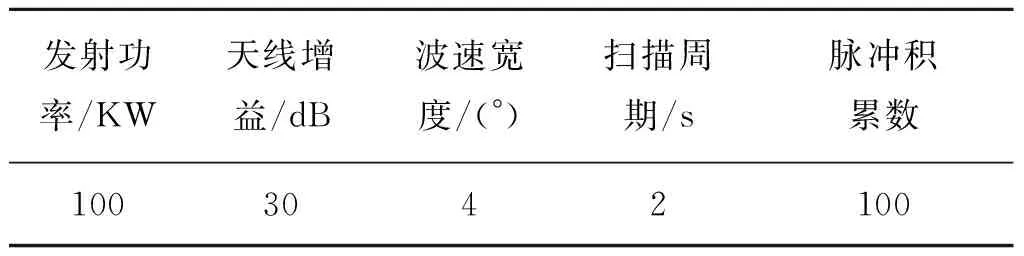
表1 目标指示雷达参数Tab.1 Parameters of target indicator radar
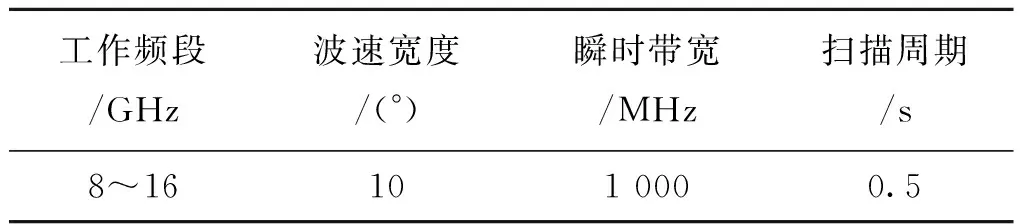
表2 侦察接收机参数Tab.2 Parameters of detective receiver
“F-15”机载雷达的主要参数如表3所示。

表3 机载雷达参数Table.3 Parameters of airborne radar
取目标指示雷达将目标方位信息传输给各个干扰站的时刻t0=2,4,6,利用式(10)、式(14),得到干扰站系统在无指示和有指示的情形下的发现概率如图2所示。
由图2可见,目标指示雷达的指示与不指示影响着干扰站系统的发现概率。指示情形下的干扰站系统的发现概率增长速率明显快于无指示情形下的。并且目标指示雷达指示的时刻t0越早,t0时刻后干扰站系统的发现概率增长速率越大。这说明,干扰站系统越早得到目标的位置信息,其对目标的发现概率增长速率越快。
同样,取目标指示雷达将目标方位信息传输给各个干扰站的时刻t0=2,4,6,利用式(15),得到系统的有源无源联合发现概率如图3所示。
由图3可知,系统的有源无源联合发现概率高于无指示下干扰站系统独立探测的发现概率。并且,目标指示雷达提供方位信息的时间越早,系统联合发现概率的增长速率越快。设定发现概率为0.8时,稳定发现目标。则指示时刻t0=2时,系统要稳定发现目标需要搜索2.8 s,而无指示下独立探测要稳定发现目标需要搜索10 s。说明有源无源联合探测发现目标的效率明显高于无指示独立探测的情形。
4 结论
本文提出了地对空雷达干扰系统有源无源联合发现概率建模方法。该方法分析了地对空雷达干扰系统的探测规律,在考虑了发现目标的完整过程下推导了有源侦察方位指示成功的概率、有方位指示和无方位指示情形下干扰站系统的发现概率,然后运用概率论思想建立了系统有源无源联合发现概率模型。通过仿真分析,有源目标指示雷达指示下的系统发现概率明显高于无指示下独立探测情形,并且指示的时刻越早,系统的联合发现概率增长越快。研究结果对于地对空雷达干扰系统侦察效能评估和其运用方式都有一定的指导意义。当然,文中结论是在干扰站的无源侦察接收机参数一致和干扰站配置形式保持不变的情况下得到的,对于更复杂运用方式的情形尚需深入研究。
[1]张佩超,程远增,梅卫.联合探测的发现概率问题研究[J].测控技术,2015,34(8):150-152.
[2]齐锋.警戒雷达网融合发现概率可视化方法研究[J].计算机工程,2013,39(9):277-280.
[3]韩国玺,何俊,祁建清.基于秩K准则的网络雷达对抗系统融合发现概率计算模型[J].海军工程大学学报,2014,26(1):64-70.
[4]程东升,李侠.有源、无源联合探测系统综合性能分析[J].火力与指挥控制,2009,34(9):95-98.
[5]刘开封,刘新学,许章凯.飞行器被雷达发现的概率计算[J].四川兵工学报,2009,30(11):35-38.
[6]张运飞,胡梦玥,赖德雄.飞行器红外暴露距离及探测概率仿真研究[J].系统仿真学报,2016,28(2):441-447.
[7]张建强,刘忠,杨红梅.基于搜索论的远程反舰导弹搜捕概率建模方法[J].国防科技大学学报,2015,37(4):188-193.
[8]刘军伟,沙基昌,陈超.搜索论研究综述[J].舰船电子工程,2010,30(5):10-14.
[9]邵国培.电子对抗作战效能分析原理[M].北京:军事科学出版社,2013.
[10]戴幻尧,杨晴,赵晶.对主动雷达导引头无源侦察截获性能分析[J].系统仿真学报,2009,21(24):7763-7772.
[11]林象平.雷达对抗原理[M].西安:西北电讯工程学院出版社,1985.
猜你喜欢
军民两用技术与产品(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
客联(2022年4期)2022-07-06
导航定位学报(2022年1期)2022-02-17
家庭影院技术(2021年9期)2021-11-05
中国电气工程学报(2019年18期)2019-10-21
文学少年(低幼版)(2019年5期)2019-07-25
中国航海(2019年2期)2019-07-24
电子制作(2019年24期)2019-02-23
北京航空航天大学学报(2017年6期)2017-11-23