基于仿生探测的大视场小目标跟踪算法
2018-01-12 06:54,,
探测与控制学报 2017年6期
,,
(北京理工大学机电动态控制重点实验室,北京 100081)
0 引言
目标探测与跟踪是弹药精确打击中最为关键与核心的部分[1]。引信前端光学探测器远距离探测并跟踪目标时,存在视场大、目标成像小、背景复杂等问题。目前针对小目标探测的研究主要针对天空背景相对简单的环境展开[2],而对复杂地面背景下的小目标探测及跟踪研究仍较少。
目标探测的主要方法有特征匹配法和前景-背景分割法。其中基于特征匹配的方法主要是匹配目标的稳定特征,比如特征点、颜色、梯度、直方图等[3-6]。基于前景-背景分割的方法则利用前景和背景之间的差异分割出背景信息[7]。
目标跟踪算法主要有基于滤波数据关联度的方法与基于目标表示和定位方法两种。其中,基于滤波和数据关联的方法主要有卡尔曼滤波[8]和粒子滤波[9];而基于目标表示和定位的跟踪算法类别中以基于均值漂移(Mean-Shift,MS)滤波[10]的目标跟踪算法为研究热点,如徐火希提出了基于Mean-Shift的运动目标跟踪算法,提高算法的鲁棒性[11];武江涛等提出了基于扩展跟踪波门的跟踪方法以提高扩展目标的跟踪精度[12]。
以上方法均未能有效地解决地面复杂背景下大视场内小目标探测时目标分辨率低、特征不稳定导致的跟踪失效的问题。为解决以上问题,本文提出基于仿生探测的大视场小目标跟踪算法。
1 仿生探测及相关理论
1.1 仿生探测原理
仿生探测是指模拟生物感知器官或系统的功能结构和作用机理,构建相似功能和结构的人工系统技术[13]。仿生探测系统的实现机理如图1所示,一般情况下可按照图中所示三个阶段进行。
1)研究生物体的某些结构与功能关系或能量转换、信息传递的关系,将研究结果简化,得到生物感知原型。
2)将生物模型提供的资料进行数学分析,分析其内在联系,从生物感知原型抽象出数学模型。
3)根据抽象出的数学模型,采用电子或机械手段,制造出可在工程上实现的模型,并通过实验、改进及发展成技术模型,实现对生物系统的工程模拟。
在视觉信息处理上,鹰眼可以在千米高空中精确探测并跟踪目标,对鹰视觉系统进行分析,发现鹰在探测目标时,首先根据其视觉特性迅速在大视场下提取感兴趣区域,随后通过单眼注视功能对目标区域进行分类判定,实现目标的跟踪。鹰眼的视觉信息处理通路主要靠两个并行通路:离顶盖通路和离丘脑通路。两个通路中神经细胞通过不同形式的感受野(Receptive Field)逐级进行抽取有效信息,从而使得鹰眼具有了运动目标检测、前景-背景分离和目标识别等能力。
1.2 形态学滤波
形态学的基本思想是用具有一定形态结构的元素度度量和提取图像中对应的形态,以简化图像数据,保持其基本形状,并去除不相干的结构区域,其基本运算有4种:膨胀、腐蚀、开运算和闭运算。其中膨胀及腐蚀运算定义如式(1)与式(2):
(f⊙g)(s,t)=min{f(s-x,t-y)+b(x,y)}
(1)
(f⊕g)(s,t)=max{f(s-x,t-y)-b(x,y)}
(2)
灰度形态膨胀以结构元素g(s,t) 模板,搜寻图像结构元范围内的灰度和的极大值。腐蚀运算的过程则是以结构元素g(s,t) 为模板,搜寻图像在结构元素大小范围的灰度差极小值。
灰度形态学开运算及闭运算的定义如式(3),(4)和式(5),开运算采用相同的结构先做腐蚀后做膨胀的迭代运算,而闭运算采用相同的结构元先做膨胀后做腐蚀的迭代运算。
f·b=(f⊕b)⊙b
(3)
f·b=(f⊙b)⊕b
(4)
Tophat(x,y)=f(x,y)-f·b
(5)
1.3 方向梯度直方图(HOG)特征
HOG特征通过构建目标方向梯度直方图,并以直方图中的统计信息作为目标特征。该特征对图像几何和光学形变保持良好的不变性[14],其提取过程如图2所示。

图2 HOG特征提取步骤
Fig.2 The extraction process of HOG
首先对图像进行归一化处理以消除光照等影响,随后将图像分成小的连通区域即细胞单元,采集细胞单元中各像素点的梯度方向直方图,最后将若干个细胞单元进行串联得到一个块,并将块中的梯度方向直方图组合起来构成块的特征描述器。
2 基于仿生探测的小目标跟踪
本文将目标成像像元数目不高于20×20,且占整幅图像的比例不超过0.25%的情况定义为大视场小目标,以下研究建立在这一基础上。将目标的探测与跟踪方法分为目标探测器与跟踪器两部分,设计基于仿生探测的小目标跟踪方法。
2.1 目标探测器原理
目标探测器主要是模仿鹰眼视觉通路的信息处理机制建立,建立探测目标可能位置的显著图,为目标跟踪器的初始化位置、修正跟踪误差提供必要数据。图3是仿鹰眼的视觉显著图建立方法。
2.1.1仿鹰眼视觉颜色模型
鹰眼的颜色辨别属于四色制,分别为红、橙、黄绿、淡白本文为模拟鹰眼颜色处理机制,提出以下两个基本假设:
1)光感受器的接收信号类型是相同的,即信号之间可以相互运算;
2)三种颜色特性信号,即长波、中波、短波信号,在下一层神经处理机制中相互拮抗,得到三条对比通路和一条亮度通路。
由此根据彩色视觉处理机制的后处理层,将三种波段的颜色信号,定义为红色、绿色和蓝色,分别对应长波、中波和短波信号。这三种颜色信号在颜色处理机制中又可以得到一条亮度通道。
2.1.2仿鹰眼感受野模型
根据鹰眼感受野特性,采用Gabor变换模拟其感受野,提取图像的局部空间信息和频率信息。Gabor滤波器在空间域上幅度图如图4,其可看作是一个正弦平面波与高斯核函数的乘积,在空间域和频率域同时具有最优局部化的特性,可以很好地描述空间频率和方向等局部信息。
图5是Gabor滤波器的二维平面的映射图,通过设定参数,可以得到如图所示一组具有不同尺度和方位的平行条纹,当目标边缘方向与滤波器方向一致时,其响应越大,反之越小,将其用于提取方向信息和边缘信息。
2.1.3Top-Hat形态学滤波处理
根据图1鹰眼显著图的构建方法,可以得到具有全局目标区域探测能力的探测器,但经过提取目标颜色、亮度及边缘特征信息而形成的目标显著图由于地面背景复杂,可能存在大量的虚假结果,即非目标区域,为了滤除该部分区域,可通过对目标显著图采用如式(3)的开运算,有效地去除显著图中的高频成分,此处采用与目标大小相似的结构元进行开运算,得到去除目标的背景图像,随后使用原显著图与滤波结果图做差,如式(5),去除大部分非目标区域。
2.2 目标跟踪器原理
目标跟踪器主要分为特征向量提取与分类器构建两部分。此处选取区域梯度分布直方图(HoG)作为特征,提取方法如图2,通过提取目标的HoG特征,得到一个高维的特征向量(X1,X2,X3,…,Xn)。
分类器构建部分选用朴素贝叶斯分类器,其具有高效率和最小误差率的优点,跟踪方法中,类别分为目标与非目标两种,其中,C=1时判断类别为目标,C=0时,判断为非目标。假设目标的特征属性条件独立,根据贝叶斯公式,候选目标特征向量为(X1,X2,X3,…,Xn)时,其类别为C的条件概率如式(6):
P(C|X1,…,Xn)=P(C)P(X1,…,Xn|C)=
(6)
其中,P(C)是类概率,P(Xi|C)是条件概率。假设在小目标跟踪过程中,由探测器探测的目标区域特征向量的条件概率满足高斯分布。
综上所述,该朴素贝叶斯分类器通过样本点训练得到特征向量在不同类别下的高斯分布,并通过选取特征向量在C=1时概率最大值的区域作为目标,表示方式如式(7):
(7)
至此,通过构建基于HOG特征与朴素贝叶斯分类器的跟踪器,以式(7)计算所得概率值衡量由探测器输出目标显著区域与目标模型之间的相似程度,选取相似度最高即候选区域概率最高的区域作为目标区域,实现对目标的定位与跟踪。
3 实验验证
为了验证本文方法有效性,采用视场模拟采集系统验证本文的跟踪方法的跟踪准确性。选用坦克及装甲车模型作为目标,如图6所示,其尺寸分别为22 cm×10 cm与20 cm×9 cm。
根据等比例原则采集实验所用图像及视频,采集实验环境如下:探测器像元阵列640×480,像元尺寸为3.7 μm,透镜焦距5 mm,探测距离15 m,模型在探测器上成像所占像元数约为20×10,约占视场的0.06%,实验环境光照强度较弱,目标与背景对比度较低。
3.1 目标探测结果
图7为装甲车模型所获原图像与通过提取显著图并二值化的对比图,分析结果可知,被标注为显著区域的像素数约占总图像像素数的0.24%,且目标所在区域被标注为显著区域,极大缩小了后期识别及跟踪的区域,减小后续计算量。由于图像背景复杂,存在一定干扰,检测结果除目标区域外仍存在部分非目标区域,如图中中上部分及边缘部分的的显著区域,因此需对以上区域内进行进一步特征提取、识别及跟踪。
3.2 目标跟踪结果
此处采用中心误差和窗口重叠率两个指标评价实验结果。中心误差是指目标跟踪结果中心点相对于目标真实位置中心点的误差,如式(8):
(8)
窗口重叠率是指目标跟踪结果和该帧中目标真实位置的重叠面积与真实目标位置区域面积的比值,如式(9):
(9)
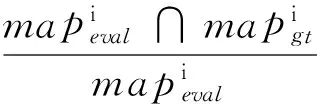
表1为本文方法对装甲车及坦克模型的跟踪窗口重叠率及中心点误差部分帧的结果数据。对该数据进行分析并与MS方法的结果进行对比,得到图8—图11。
表1 坦克及装甲车跟踪结果数据Tab.1 The result of panzer and tank’s tracking
图8为装甲车模型目标的跟踪结果,由图可知,该方法能够从探测器输出结果进行进一步判别与分类,并最终实现小目标区域的定位。
图9为上述方法与MS方法在跟踪过程中跟踪中心误差与窗口重叠率统计结果对比图。由结果图可看出均值漂移方法的跟踪中心误差随着帧数增加而累积加大,且平均误差为6个像素,在探测距离为15 m时对应空间上误差约为6.7 cm,跟踪窗口重叠率为57.4%。本文方法中心误差随帧数增加逐渐趋于平稳,平均误差为1.95个像素,探测距离为15 m时空间误差约为2.2 cm,跟踪窗口重叠率79.3%,跟踪效果明显优于均值漂移算法。
图10为坦克模型目标的跟踪结果,图11为不同方法在跟踪过程中跟踪中心误差与窗口重叠率统计结果对比图。
由于坦克模型和地面背景相近,采用灰度直方图特征的均值漂移方法在第10帧后跟踪失败,中心误差大于15个像素点,且窗口重叠率为0。本文方法虽然目标特征提取失败但在探测器的误差纠正下,最终跟踪中心误差稳定在2个像素,平均中心误差为2.2个像素,探测距离为15 m时对应空间误差为2.4 cm,窗口重叠率为79.0%。经实验验证,本文方法可以有效解决大视场下小目标的检测及跟踪问题。
4 结论
本文提出了基于仿生探测的大视场小目标跟踪算法。通过提取图像中颜色拮抗特征及亮度特征,并根据感受野模型获得目标边缘及方向特征,通过线性融合得到显著图,对该显著图进行形态学滤波去除多数非目标区域,并通过提取HOG特征在上述检测所得区域对目标进行跟踪。
实验结果表明,该算法可以有效解决大视场下小目标的探测与跟踪问题,为成像引信远距离探测目标奠定理论基础。后续研究中,可针对目标成像大小发生变化时的跟踪窗口自适应变化问题继续展开研究。
[1]田鹏辉,隋立春,燕莎. 红外运动小目标检测方法综述[J]. 探测与控制学报,2013,35(2):76-80.
[2]曲劲松. 基于光电跟踪转台的空中小目标检测与跟踪系统设计[D].北京:北京工业大学, 2014.
[3]李鹏, 刘玉, 王敬东. 一种基于SIFT和KLT相结合的特征点跟踪方法研究[J]. 宇航学报, 2011,32(7):1618 -1625.
[4]XU Kun, HE Yuyao, WANG Weiya, et al. Object tracking algorithm with adaptive color space based on CamShift[J]. Journal of computer application, 2009(3):757-760.
[5]郭伟, 朱红, 赵亦工,等. 基于新的梯度特征相似度量的目标跟踪算法[J]. 光电工程, 2008(4):17-22.
[6]Yong W, Chen F, Guo Hongxiang, et al. Kernel spatial histogram target tracking based on template drift correction[J]. Acta Automatica Sinica, 2012, 38(3):430-436.
[7]李少毅, 梁爽, 张凯,等. 基于红外压缩成像的点目标跟踪方法研究[J].电子与信息学报, 2015(7):1639-1645.
[8]Patel H A, Thakore D G. Moving object tracking using Kalman filter[J]. International Journal of Computer Science & Mobile Computing, 2013,2(4):1-5.
[9]于金霞, 许景民. 多特征融合的自适应性粒子滤波跟踪算法[J]. 计算机工程与应用, 2014(18):178-181.
[10]Iraei I, Faez K. Object tracking with occlusion handling using mean shift, Kalman filter and Edge Histogram[C]// Pattern Recognition and Image Analysis (IPRIA), 2015 2nd International Conference. IEEE, 2015:1-6.
[11]徐火希. 基于改进Mean Shift的运动目标跟踪算法[J]. 兵器装备工程学报,2016(2):127-130.
[12]武江涛,白森. SAR-GMTI中扩展目标跟踪[J]. 四川兵工学报,2015(11):108-111.
[13]李东光, 李杰, 马宝华. 仿生探测技术在武器系统中的应用初探[C]//第十二届引信学术年会论文集.西安:中国兵工学会引信专业委员会,2001.
[14]Dalal N, Triggs B, Schmid C. Human detection using oriented histograms of flow and appearance[M]// Computer Vision-ECCV 2006. Springer Berlin Heidelberg, 2006:428-441.
猜你喜欢
现代电子技术(2022年18期)2022-09-17
航天返回与遥感(2022年3期)2022-07-07
中学生数理化(高中版.高考数学)(2022年1期)2022-04-26
微型计算机·Geek(2020年4期)2020-06-15
学苑创造·B版(2019年4期)2019-05-09
小哥白尼·军事科学画报(2019年12期)2019-03-02
中学生数理化·八年级数学人教版(2017年2期)2017-03-25
体育时空·上半月(2016年5期)2016-10-21
航空模型(2016年1期)2016-03-01