
线扫描式机载LiDAR系统误差影响分析研究
2018-01-09 06:02肖学年苏春艳刘站科张庆涛陈小英
测绘工程 2018年1期
肖学年,苏春艳,刘站科,2,张庆涛,陈小英
(1.国家测绘地理信息局第一大地测量队,陕西 西安,710054;2.武汉大学 测绘学院,湖北 武汉 430079)
线扫描式机载LiDAR系统误差影响分析研究
肖学年1,苏春艳1,刘站科1,2,张庆涛1,陈小英1
(1.国家测绘地理信息局第一大地测量队,陕西 西安,710054;2.武汉大学 测绘学院,湖北 武汉 430079)
机载LiDAR系统会受到多种误差源的影响,系统误差会给激光脚点的坐标带来系统偏差。针对安置向量误差、安置角误差、激光测距误差以及扫描角尺度因子误差这几种重要误差源,从机载LiDAR系统几何定位方程出发,推导了机载LiDAR系统误差影响计算公式,并结合模拟实验,分别研究了这几类误差源对激光脚点定位精度的影响规律,从理论上分析了各类误差对机载LiDAR系统定位精度的综合作用。文中的结果为设计系统检校方法并消除这些系统误差的影响提供理论依据,具有重要的参考价值。
机载LiDAR;几何定位方程;系统误差;激光脚点误差
机载激光雷达(LiDAR)测量技术作为一种新兴的空间对地观测技术,具有成本低、机动灵活、观测精度高、作业效率高等优点,在多等级三维空间信息的实时获取方面产生了重大突破,在灾害监测、环境监测、海岸侵蚀监测、资源勘察、深林调查、测绘和军事等方面的应用具有独特的优势和广泛的应用前景。然而,由机载LiDAR系统直接获取的原始数据中含有大量的系统误差,这会导致重叠航带的同名特征间产生三维空间偏移,严重影响点云数据的相对精度以及后续的数据处理和信息提取。目前已有不少学者对机载LiDAR系统误差进行了分析[1-4],但仍存在不少未知,对各系统误差源及其影响的估计也没有完整清晰的认识[5]。
本文针对机载LiDAR系统的安置向量误差、安置角误差、激光测距误差以及扫描角误差等重要误差源,基于几何定位方程,详细推导了误差影响公式,并通过模拟实验定性定量地分析了各类误差对激光脚点定位精度的影响,对各类误差的影响规律有了清晰的认识,对机载LiDAR后续系统误差的消除或削减提供重要依据。
1 机载LiDAR几何定位方程
机载LiDAR对地定位属纯几何定位[6],工作原理如图1所示。

图1 机载LiDAR工作原理
激光测距仪精确测定发射点到激光脚点之间的斜距ρ以及扫描角度β; INS测定飞行平台的姿态:侧滚角roll、俯仰角pitch和航向角yaw;GPS提供飞行器精确的位置信息(X0,Y0,Z0)。在数据后处理中,联合上述获取的数据以及系统安置参数,即安置角(Δω,Δφ,Δκ)和安置向量(ΔX,ΔY,ΔZ),通过一系列的坐标转换,即可求出激光脚点的三维空间直角坐标(X,Y,Z),其几何定位方程见式(1)。


(1)
式中:x=-ρsinβ=Htanβ,H=-ρcosβ。
2 系统误差影响公式推导
为方便研究、分析系统误差对激光脚点定位的影响规律,假设扫描线为“正规化扫描线”,且各项误差之间相互独立[6-7]。
对于正规化扫描线而言,
(2)
将式(2)代入式(1)中,则相应的机载LiDAR定位方程为

(3)

).
(4)

).
(5)
式中,δx′=(δΔX,δΔY,δΔZ,δΔω,δΔφ,δΔκ,δΔρ,δS)。
利用泰勒级数展开式,对式(5)进行线性化,去掉二次及更高次项,得到误差影响式(6)~式(9)。
(6)
(7)
(8)
(9)
3 系统误差影响规律
通过模拟实验研究安置向量误差(δΔX,δΔY,δΔZ)、安置角误差(δΔω,δΔφ,δΔκ)、测距误差(δΔρ)和测角误差(δS)对激光脚点坐标的影响规律,模拟实验数据见表1。

表1 模拟实验数据
3.1 安置向量误差对激光脚点坐标的影响
安置向量误差对激光脚点坐标的影响式(6)可分解为以下三部分:
(10)
(11)
(12)
利用式(10)~式(12)进行模拟实验,其中,安置向量误差δΔX,δΔY,δΔZ依次为0.1 m,0.2 m,0.3 m。其影响结果如图2所示。
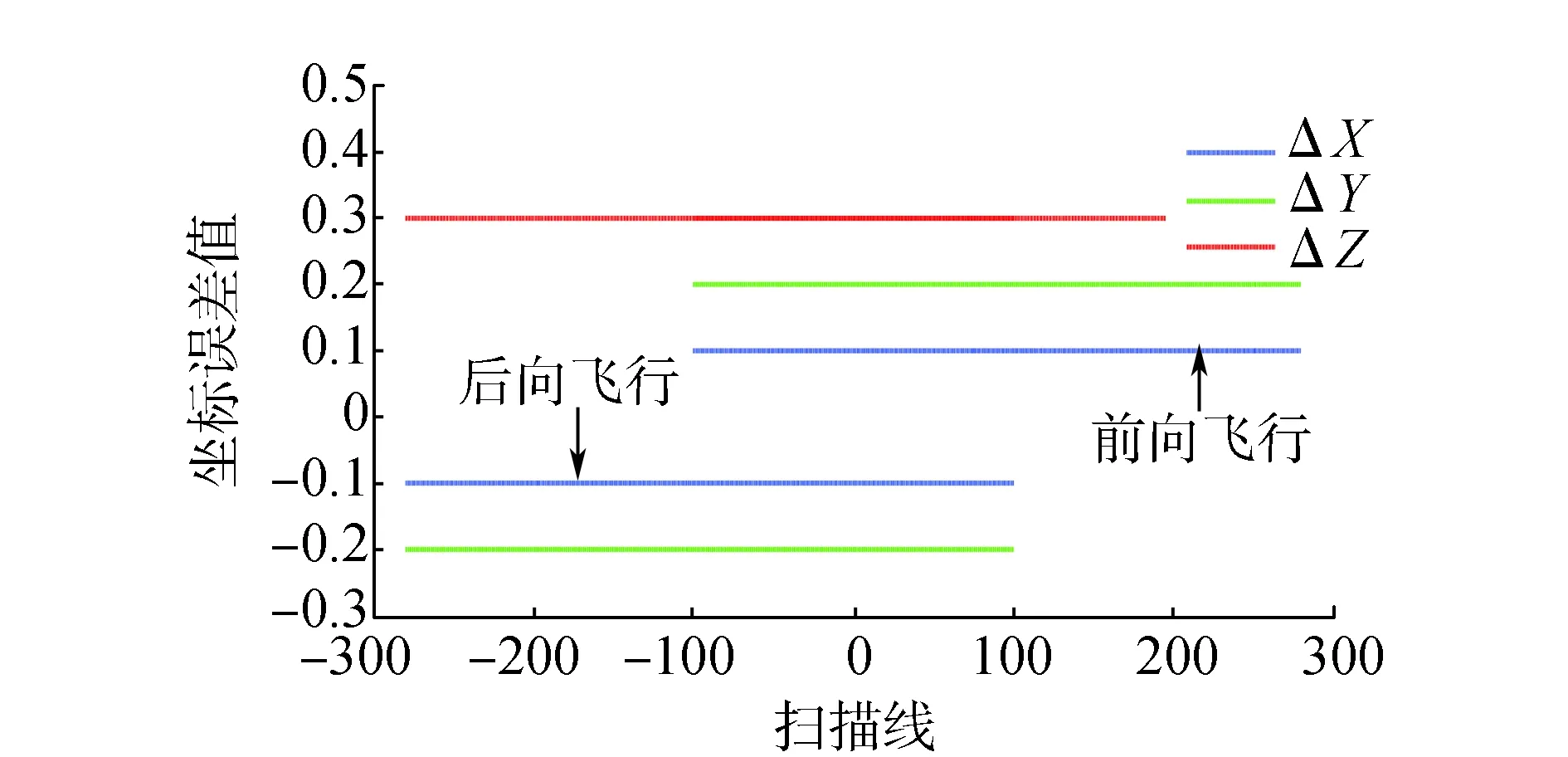
图2 (0.1,0.2,0.3)m安置向量误差的模拟结果
由式(10)~式(12)和图2可知,安置向量误差(ΔX,ΔY,ΔZ)与激光脚点坐标误差是1∶1的关系,会全部“移植”到激光脚点坐标分量中,而且,安置向量误差对激光脚点坐标影响与飞行高度、扫描角无关,仅与飞行方向有关(Z坐标除外)。
3.2 安置角误差对激光脚点坐标的影响
安置角误差对激光脚点定位精度的影响对应于式(13)~(15)。
(13)
(14)
(15)
同样,利用公式和模拟数据,模拟安置角误差对激光脚点坐标的定量影响实验,结果如图3、图4和图5所示。
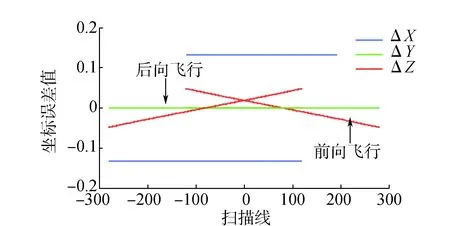
图3 50″侧滚向安置角误差roll(Δφ)模拟结果
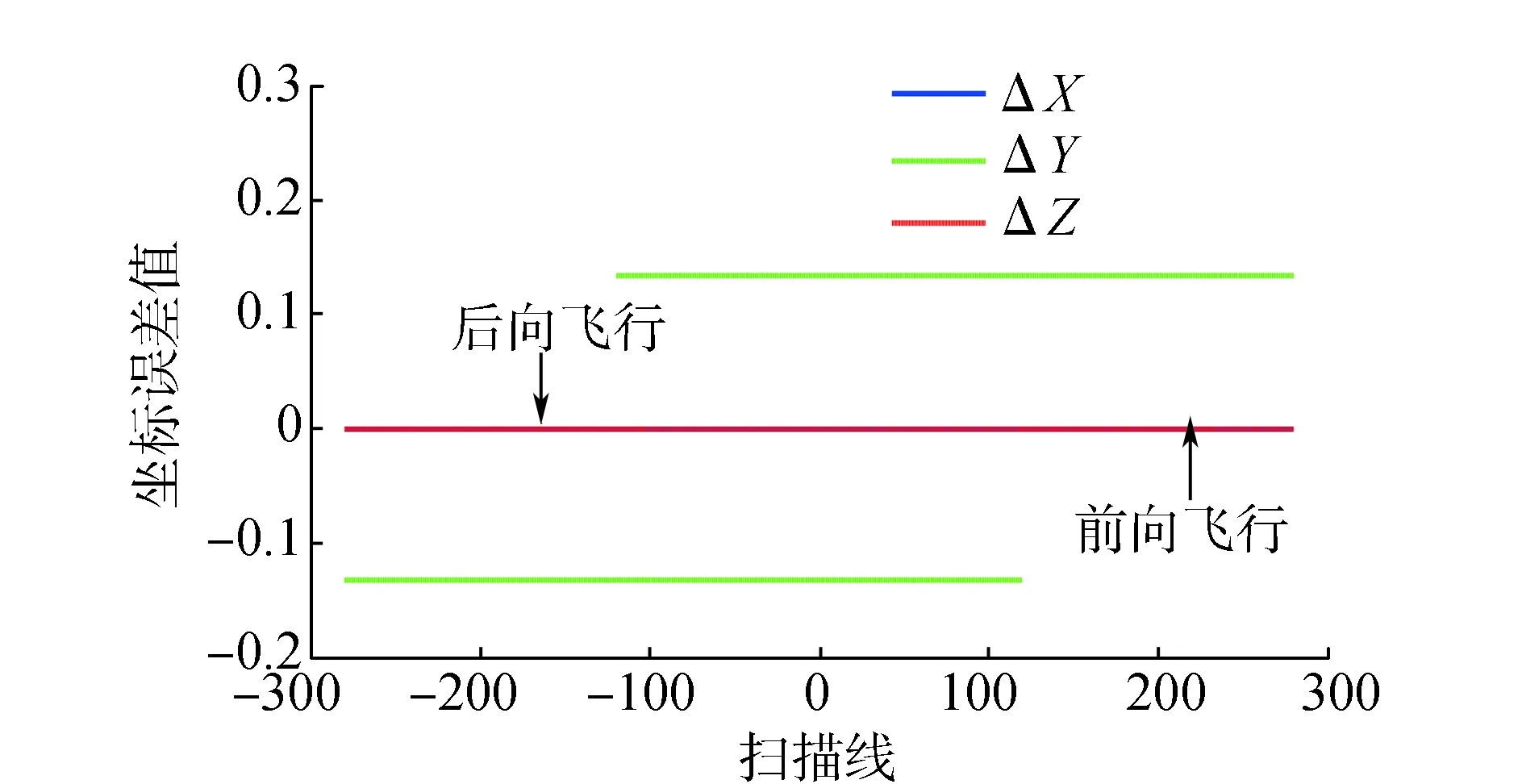
图4 50″俯仰向安置角误差pitch(Δω)模拟结果

图5 50″航偏向安置角误差yaw(Δκ)模拟结果
由式(13)~(15)和图3、图4和图5知,激光脚点在X轴方向上的误差是由侧滚向安置角误差roll引起,其值是一个定值,取决于航高H;在Y轴方向上的误差主要受俯仰向安置角误差pitch和航偏向安置角误差yaw的影响,由俯仰向安置角误差pitch所引起的坐标误差是一个常量,大小取决于航高H,而由航偏安置角误差yaw所引起的误差,大小随扫描角的增大而增大;在Z轴方向上的误差是由侧滚向安置角误差roll引起,大小与飞行高度和扫描角有关。
3.3 激光测距误差对激光脚点坐标的影响
在“正规化扫描”条件下,只考虑激光测距误差(即安置角误差Δω=Δφ=Δκ=0,扫描角编码因子S=1),测距误差对激光脚点定位精度影响式为
(16)
利用式(16)对激光测距误差的影响进行模拟实验。其中,测距误差取值0.5 m,实验结果如图6所示。
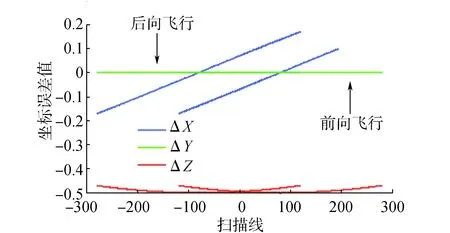
图6 Δρ=0.5 m激光测距误差模拟结果
由式(16)和图6可知,测距误差对激光脚点Y坐标没有影响;对激光脚点X坐标的影响即扫描线方向,随着扫描角的增大而增大,当扫描角为零时,平面定位误差为零;对激光脚点Z坐标的影响随着扫描角的增大而减小,在瞬时扫描角为零时影响最大。
3.4 扫描角误差对激光脚点坐标的影响
扫描角误差仅指角度编码尺度因子误差δS,为研究角度编码尺度因子对激光脚点坐标精度的影响规律,假设安置角误差不存在且航高H不变,则扫描角误差对激光脚点坐标的影响式为
(17)
模拟实验结果如图7所示。
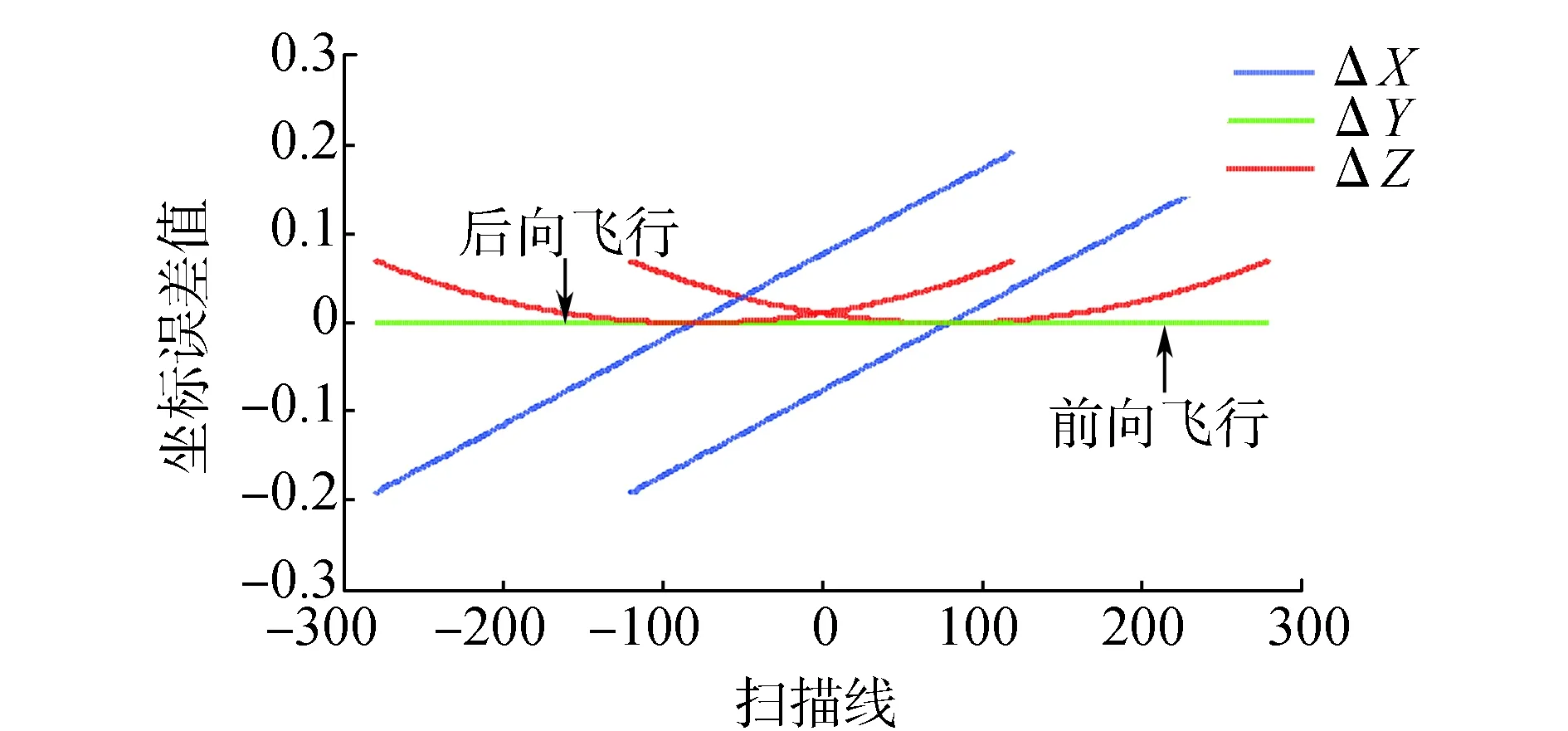
图7 δS=0.001扫描角尺度因子误差模拟结果
由式(17)和图7可知,激光扫描角误差对沿飞行方向的定位精度没有影响;对垂直于航向(扫描方向)的定位精度的影响与航高H和扫描角β有关,在同一飞行高度下,随着扫描角的增大而线性增大;对高程精度的影响同扫描方向的影响规律一样,当飞行高度不变时,随扫描角的增大而增大,在扫描中心处,误差为零。
4 机载LiDAR系统定位精度分析
第3节分析讨论了各类误差对激光脚点坐标的影响规律,各类误差对激光脚点定位精度的影响方式与程度各不相同。现综合考虑“正规化扫描”情况下,各类误差对激光脚点坐标的综合作用。
假设安置向量误差δΔX,δΔY,δΔZ依次为0.1 m,0.2 m,0.3 m;安置角误差δΔω=δΔφ=δΔκ=50″;激光测距误差Δρ=0.5 m;扫描角尺度因子误差δS=0.001,各类误差对激光脚点坐标影响的综合作用见表2。
由表2可知,机载LiDAR系统高程定位精度优于平面精度。在航高变化很小的情况下,航向定位误差随扫描角的增大而增大,旁向定位误差变化不大;而高程定位误差随扫描角的增大而增大。
5 结束语
机载LiDAR系统定位精度的影响因素,除上述安置误差、姿态误差、扫描角误差、激光测距误差外,还会受到各组成部分的时间同步精度、地表的反射性能、地形起伏、大地高到水准高的转换模型也会影响到机载LiDAR系统的测量精度。本文仅针对机载LiDAR系统误差中比较重要的几种误差 — 安置向量误差、安置角误差、激光测距误差以及扫描角误差,利用几何定位方程,推导了各类误差对激光脚点坐标的影响式,并通过模拟实验定性定量地分析了各类误差对激光脚点定位精度的影响规律。对这几种重要的误差有了清晰的认识,这将对机载LiDAR后续系统误差的消除或削减,以及数据的后处理具有非常重要的理论研究意义和实际应用价值。
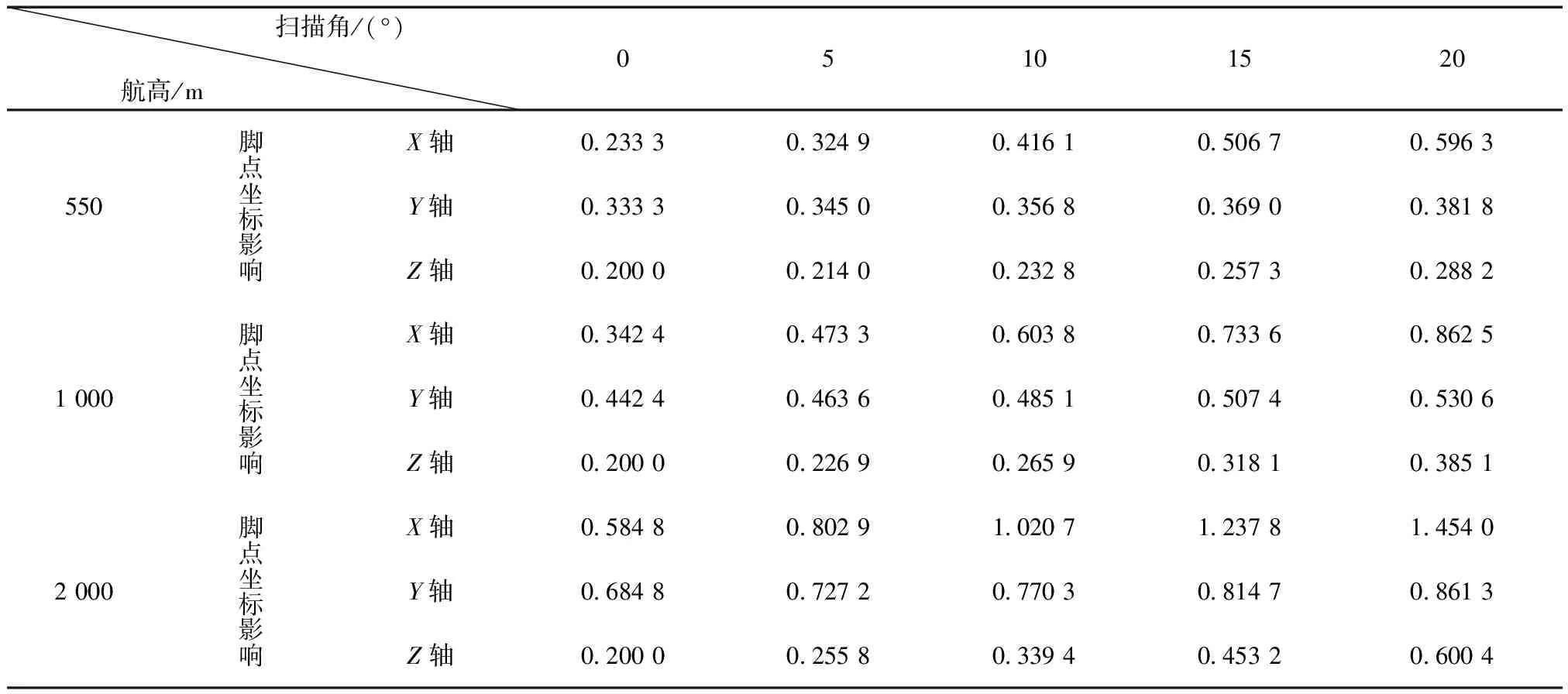
表2 安置向量误差、安置角误差、激光测距误差与扫描角尺度因子误差对激光脚点坐标影响的综合作用 m
[1] 索效荣,王丽英.机载LiDAR系统定位方程、误差分析与精度评定[J].测绘科学,2011,36(4):114-117.
[2] 苏春艳.机载LiDAR多参数系统误差检校方法研究[D].西安:长安大学,2015.
[3] 许晓东,张小红,程世来.机载激光扫描测高系统的安置角误差检校[J].黑龙江科技信息,2010(1):13.
[4] BANG K I.Alternative methodologies for LiDAR system Calibration[D].alberta: universty of calgary, 2010.
[5] PFEIFER N,BRIESE C.Geometrical aspects of airborne and terrestrial laser Scanning[J]. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 2007,3(3/W52):311-319.
[6] 张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社,2007.
[7] 覃昕垚,张建军,王勇,等.机载LiDAR定位精度分析[J].测绘工程,2016,25(5):32-35.
AnalysisoftheinfluencescausedbysystematicerrorsoflinescanningairborneLiDAR
XIAO Xuenian1,SU Chunyan1,LIU Zhanke1,2,ZHANG Qingtao1,CHEN Xiaoying1
(1.The First Geodetic Surveying Brigade of NASG, Xi’an 710054,China;2.School of Geodesy and Geomatics,Wuhan University, Wuhan 430079,China)
Airborne LiDAR system can be influenced by a variety of error sources, which brings the laser foot point coordinate. Aiming at several important error source,such as the offset error, boresight angle error, laser ranging error and scanning angle scale factor error, from airborne LiDAR system geometric positioning equation, this paper derives the system error influence formula of airborne LiDAR, and respectively studies the several kinds of error sources on the influence law of laser foot point positioning accuracy combined with the simulation experiment. The synthetic influence of laser foot point coordinates of various kinds of error are analyzed and studied theoretically. The conclusions from various types of errors will have important theoretical and practical value of eliminating systemitic errors and checking post-processing LiDAR data, which servers as a reference value.
airborne LiDAR;geometric positioning equation;systematic errors;laser foot point error
2016-10-09
肖学年(1964-),男,教授级高级工程师,博士.
著录:肖学年,苏春艳,刘站科,等.线扫描式机载LiDAR系统误差影响分析研究[J].测绘工程,2018,27(1):15-19.
10.19349/j.cnki.issn1006-7949.2018.01.004
P237
A
1006-7949(2018)01-0015-05
刘文霞]
猜你喜欢
石油地质与工程(2019年3期)2019-09-10
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
北京航空航天大学学报(2017年4期)2017-11-23
中国惯性技术学报(2017年1期)2017-06-09
雷达学报(2017年1期)2017-05-17
材料科学与工程学报(2016年2期)2017-01-15
系统工程与电子技术(2016年7期)2016-08-21
中国海上油气(2015年3期)2015-07-01
