全时四驱SUV爬坡性能分析与优化
2018-01-09 03:21陈国钰金智林
重庆理工大学学报(自然科学) 2017年12期
陈国钰,金智林,王 铭
(南京航空航天大学 车辆工程系, 南京 210016)
全时四驱SUV爬坡性能分析与优化
陈国钰,金智林,王 铭
(南京航空航天大学 车辆工程系, 南京 210016)
为提升汽车的爬坡性能,进行了某全时四驱SUV(运动型多用途汽车)的爬坡性能计算、分析及优化研究。考虑风阻对爬坡度的影响,建立汽车爬坡动力学模型,分别从驱动力条件和地面附着条件进行了最大爬坡度的理论值计算;应用AVL Cruise软件对全时四驱SUV理论模型进行验证及动力性和经济性分析,并与相同整车参数的前驱、后驱SUV进行爬坡度对比;基于遗传算法对汽车爬坡性能及燃油经济性进行参数优化。结果表明:相同整车参数条件下,全时四驱方式爬坡度明显优于前驱、后驱方式;应用遗传优化算法可在燃油经济性约束条件下明显提升SUV爬坡性能。
四驱SUV;爬坡性能;经济性;遗传优化
随着四轮驱动技术的不断发展,四轮驱动车种类越来越多,出现了全时、分时、适时等不同类型四轮驱动方式,其中全时四驱总是处于四轮驱动状态,具有良好的操纵性和动力性[1],但是经济性差,燃油消耗率高,多为中高端SUV车型。全时四驱SUV具有良好的通过性,最直观的评价指标是最大爬坡度,较大的爬坡度是汽车适应复杂工况前提条件之一。
近年来,在减少燃油消耗量的基础上合理优化汽车动力传动系统、尽可能满足驾驶员对于汽车动力性能需求已成为研究热点。赵治国等[2]建立了四轮驱动混合动力轿车前向仿真模型;高阳等[3]建立了全时四轮驱动汽车驱动动力学模型,并设计了牵引力综合控制策略;Senatore等[4]研究了转矩分配对四轮驱动越野车牵引效率的影响;李洋等[5]提出了四轮驱动汽车轴间驱动力和制动力分配方法;郭瑞玲等[6]研究了载货汽车燃油经济性与整车质量之间的关系;Lister 等[7]分析了不同驾驶条件下并行式混合动力汽车的燃油经济性;Keulen等[8]设计并通过实验验证了混合动力卡车最优功率分配比;Huang等[9]优化了四轮驱动车辆的牵引效率;Roy等[10]以提升燃油经济性为目标优化了混合动力车动力传动系统参数;Vitorino等[11]采用带精英策略的非支配排序遗传算法NSGA-II,提出并优化了传动系统二次分配策略;颜伏伍等[12]提出了基于多目标遗传算法的汽车动力传动系统参数优化设计方法。这些关于汽车动力性和经济燃油性的研究大部分限定在新能源汽车领域,且动力参数优化多针对纯电动、混合动力等车型,对传动车型动力参数优化研究较少。
针对上述问题,本文根据四驱汽车爬坡过程特性建立了全时四驱SUV爬坡动力学模型,依据给定整车基本参数计算最大爬坡度理论值,利用AVL Cruise软件设置仿真任务,分析了四驱SUV爬坡动力性及经济性,与理论值进行比较,分析了误差原因,并利用遗传优化算法对关键参数进行优化,从而实现汽车整体动力性能的提升。
1 四驱SUV爬坡性能计算
1.1 四驱SUV爬坡动力学分析
假设汽车左右车轮受到地面反力相同,考虑前后车轮受到不同驱动力及垂直载荷的影响,建立汽车的爬坡动力学模型,如图1所示。

图1 SUV爬坡受力分析
根据力矩平衡可得前后轮垂直载荷:
(1)
式中:FZ1、FZ2为地面作用在前、后轮上的法向反作用力;G为汽车重力;a、b为汽车质心到前、后轴的距离;L为汽车轴距;α为道路坡度角;hg为质心高度;g为重力加速度;Iw为车轮的转动惯量;If为飞轮的转动惯量;ig为变速器传动比;i0为主减速器传动比;r为车轮半径;FZw1、FZw2为位于前、后轮接地点上方作用于车身的空气升力;f为滚动阻力系数。
前、后轮上的空气升力为
(2)
式中:CLf、CLr为前、后轮上的空气升力系数;A为迎风面积;ρ为空气密度;ur为相对速度。
式(2)中旋转质量惯性阻力矩以及滚动阻力矩的数值很小,可忽略,则式(1)简化可得
(3)
汽车切向反作用力为
FX=Ff+FW+Fi+Fj
(4)
其中:
Ff=Gfcosα
(5)

(6)

(7)
Fi=Gsinα
(8)
式中:Ff为滚动阻力;Fi为坡道阻力;FW为空气阻力;Fj为汽车行驶时所需要克服的加速阻力;CD为空气阻力系数;ua为汽车行驶速度。
四驱SUV转矩分配系数为

(9)
式中:ψ为转矩分配系数;Tt1为前轮转矩;Tt2为后轮转矩。
前轮切向反作用力为
FX1= (1-ψ)FX
(10)
后轮切向反作用力为
FX2=ψFX
(11)
1.2 最大爬坡度理论值
选取某全时四驱SUV,根据地面附着条件和最大驱动力2个条件进行汽车的最大爬坡度理论值计算,整车参数如表1所示。

表1 SUV整车基本参数
基于地面附着条件进行最大爬坡度计算。当四轮驱动汽车在进行爬坡时必须满足所有驱动轮附着率Cφ要小于地面附着系数φ这一条件,因此SUV前后轮的附着率为:

(12)

(13)
忽略对附着率影响很小的滚动阻力、速度很小时的空气阻力、空气流动所带来的空气升力,将式(12)和式(13)化简为:

(14)

(15)
其中q为等效坡度,其值为
(16)
当Cφ1>Cφ2时,前轮先发生滑转,等效坡度为
(17)
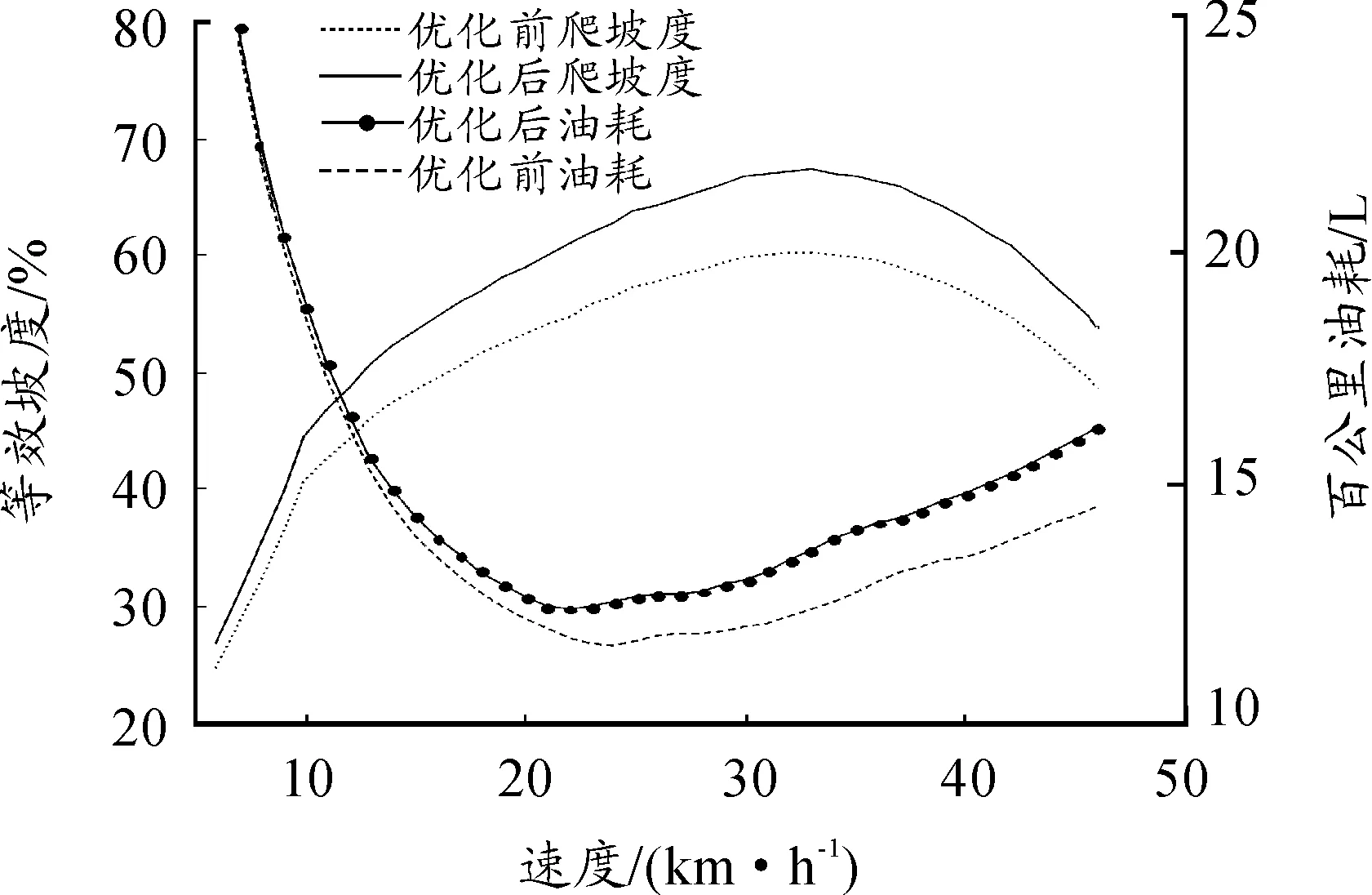
当Cφ1 (18) 将SUV整车参数代入式(18)可得:等效坡度为q=63.10%,爬坡角度为α=32.30°。 考虑空气阻力影响下的前后轮切向反作用力为 FX=FW+Fi+Fj (19) 前后轮的附着率为 (20) (21) 当Cφ1>Cφ2时,前轮先发生滑转,等效坡度为 (22) 当Cφ1 (23) 将四驱SUV的整车参数代入式(23)可得:等效坡度q=63.0%,爬坡角度为α=32.2°。由此可见空气阻力对于SUV最大爬坡度的影响很小。 基于驱动力的最大爬坡度时,汽车的行驶动力学方程为 Ft=Ff+FW+Fi+Fj (24) 其中发动机提供的最大转矩所决定的牵引力为 (25) 式中:Ttq为发动机转矩;ig为变速器的传动比;ηT为传动效率。 可以得到基于驱动力的最大爬坡度为 (26) 汽车在1挡时变速器传动比最大,导致转矩的输出也最大。将四驱SUV的整车基本参数代入式(26)可得:等效坡度q=64.70%,爬坡角度α=32.90°。 有空气阻力时的最大爬坡度为 (27) 将四驱SUV的整车参数代入式(27)可得:在1挡时汽车最大爬坡度与没有空气阻力时非常接近,相差为0.005°。该结果表明:基于驱动力计算汽车的最大爬坡度时空气阻力所带来的影响甚至比基于地面条件时的还要小,可以忽略不计,但在严格要求条件下需要考虑风阻因素。 由上述分析可得:忽略空气阻力,在常规工况下,基于地面条件的最大等效坡度q1=63.10%;在地面上附着系数足够大的前提下,基于驱动力的最大等效坡度q2=64.7%。通过比较计算结果可以得到,基于驱动力条件的最大爬坡度要大于基于地面附着条件的最大爬坡度,说明该汽车的爬坡性能主要受地面附着条件的制约,所以汽车最大爬坡度为 q=min{q1,q2} (28) 即确定理论最大等效坡度q=63.10%。 为验证理论计算结果,利用AVL Cruise软件对某全时四驱SUV汽车进行建模与仿真分析。AVL Cruise软件是用于研究整车及其动力总成装置的仿真软件,它能实现汽车的燃油经济性、动力性、制动性、操纵稳定性等方面的仿真分析。模块化的建模方式使得 AVL Cruise可以针对不同种类和结构的汽车建立模型并进行仿真计算。分模块建立汽车各个部件的模型,包括轮胎模型、发动机模型,离合器,变速器,主减速器,差速器等,如图2所示。 图2 某全时四驱SUV模型结构 设置仿真任务,包括汽车爬坡性能计算、爬坡过程百公里油耗计算,得到的仿真结果如图3所示。在相同工况下,整车参数不变,只改变SUV驱动方式,对前驱、后驱方式进行最大爬坡度仿真,得到的仿真结果如图4所示。 图3 四驱爬坡度与百公里油耗 图4 前驱、后驱、四驱爬坡度对比 由图3可知:初始阶段,不论有无风阻,速度增加,输出转矩减小,但速度的增大可以为爬坡过程提供足够的初始动能以克服输出转矩不足,因此最大爬坡度与速度成正相关,当速度为33 km/h时,无风阻最大等效坡度达到最大值61.11%,有风阻最大等效坡度达到最大值59.65%,二者相差2.37%;之后速度继续增加,导致输出转矩过小,不足以达到上坡过程所需转矩,最大等效坡度逐渐减小。 同时随着车速增加,功率和利用率增大,燃油消耗量减小,因此在初始阶段百公里油耗与速度成负相关;当速度达到24 km/h时,百公里油耗最低为11.65 L;当超过该速度时,随着发动机转速增加,燃油消耗量增加。 忽略风阻,该SUV最大爬坡等效坡度仿真结果与理论值相差3.17%;考虑风阻,该SUV最大爬坡等效坡度仿真结果与理论值相差5.46%。 由图4可知:忽略风阻,在相同工况下,该SUV前轮驱动时最大等效坡度为51.02%,与四轮驱动时最大等效坡度相差16.51%;后轮驱动时最大等效坡度为54.41%,与四轮驱动时最大等效坡度相差10.96%。 由仿真结果可知:该SUV在爬坡过程中百公里油耗最低仅为11.65 L,燃油经济性良好。为继续提升该SUV爬坡性能,在满足燃油经济性约束(爬坡过程百公里油耗最小值低于14.0 L)时,对SUV的动力传动系统进行多目标遗传算法优化以最大限度地提升其爬坡性能。 优化设计时将动力性、排放量、燃油性定为优化目标。优化过程不需要求导和考察函数的连续性,具有良好的拓展性。在汽车动力性和经济性影响因素中,发动机功率、转矩分配系数、变速器与主减速器的传动比都有较大影响,因此选取以上参数作为优化设计变量。遗传算法流程如图5所示。 图5 遗传算法流程 考虑四驱SUV爬坡性能计算要求优化设计条件。约束条件为:在满足油耗和排放的基础上,最大限度地提升爬坡度数值。依据该目标建立遗传算法优化目标函数 (29) 其中:C(X)为最大爬坡度;A(X) 为排放量;B(X) 为燃油消耗量;di(X)为不等式约束条件;ej为约束条件初始值;X为包含SUV优化参数的向量。 1) 采用二进制编码形式表示参数向量X。 2) 在优化变量X的可行域内随机生成N个个体作为初始种群。 3) 在由N个个体组成的总群中适应度较高的个体更容易存活至下一代。 4) 对群体个体按照适应度指标施加一定操作,如复制、交叉、变异等,实现优胜劣汰,不断逼近最优解。 SUV的动力传动系统参数优化后的汽车爬坡性能及经济性仿真结果如图6所示。 图6 优化后爬坡度和百公里油耗 由图6可知:优化后,该SUV最大爬坡等效坡度为67.1%,即坡度角α=33.9°,最大爬坡度相对于无空气阻力条件提升了10.91%,爬坡性能优化效果明显;优化后该SUV爬坡过程中百公里油耗最低值为12.43 L,相比优化前油耗增加了6.70%,但依旧满足小于14.0 L的约束条件。 1) 全时四驱SUV爬坡性能明显优于前驱、后驱车辆;空气阻力对该全时四驱SUV爬坡性能影响微小,在要求不严格时可以忽略不计。 2) 所建立的全时四驱SUV爬坡动力学模型精度高,理论最大爬坡度与实际值的误差在6%以内。 3) 应用遗传算法优化方法可明显提升四驱SUV爬坡性能,且满足燃油消耗约束,为全时四驱SUV设计提供了理论依据。 [1] SHUAI Z,ZHANG H,WANG J,et al.Lateral motion control for four-wheel-independent-drive electric vehicles using optimal torque allocation and dynamic message priority scheduling[J].Control Engineering Practice,2014,24(1):55-66. [2] 赵治国,何宁,朱阳,等.四轮驱动混合动力轿车驱动模式切换控制[J].机械工程学报,2011,47(4):100-109. [3] 高阳,李静,赵健,等.全时四轮驱动汽车驱动轮牵引力综合控制策略[J].吉林大学学报(工学版),2009,39(2):18-21. [4] SENATORE C,SANDU C.Torque distribution influence on tractive efficiency and mobility of off-road wheeled vehicles[J].Journal of Terramechanics,2011,48(5):372-383. [5] 李洋,张建伟,郭孔辉,等.四轮驱动电动汽车轴间驱动力和制动力分配[J].吉林大学学报(工学版),2015,45(3):703-710. [6] 郭瑞玲,苑林,谢东明,等.载货汽车燃油经济性与整车质量的相关性研究[J].汽车工程,2015(6):613-616. [7] LISTER R,PALMER S.Analysis of the fuel economy of parallel type hybrid vehicle under the various driving condition[Z].2015. [8] KEULEN T V,MULLEM D V,JAGER B D,et al.Design,implementation,and experimental validation of optimal power split control for hybrid electric trucks[J].Control Engineering Practice,2012,20(5):547-558. [9] HUANG W,WONG J Y,KNEZEVIC Z.Further study of the optimisation of the tractive efficiency of all-wheel-drive vehicles[J].International Journal of Heavy Vehicle Systems,2014,21(2):123-151. [10] ROY H K,MCGORDON A,JENNINGS P A.A genera-lized powertrain design optimization methodology to reduce fuel economy variability in hybrid electric vehicles[J].IEEE Transactions on Vehicular Technology,2014,63(3):1055-1070. [11] VITORINO R M,JORGE H M,NEVES L P.Multi-objective optimization using NSGA-II for power distribution system reconfiguration[J].International Transactions on Electrical Energy Systems,2015,25(1):38-53. [12] 颜伏伍,胡峰,田韶鹏,等.基于多目标遗传算法的汽车动力传动系统参数优化设计[J].汽车技术,2009(12):20-23. AnalysisandOptimizationofClimbingPerformanceforanAllWheelDriveSUV CHEN Guoyu, JIN Zhilin, WANG Ming (Department of Vehicle Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China) In order to improve climbing performance of vehicle, the analysis and optimization of the climbing performance of an all wheel drive (AWD) SUV(Sport Utility Vehicle) is researched. Taking the wind resistance into consideration, a dynamic model of an AWD SUV is established, and the theoretical maximum climbing degree is calculated from the driving force condition and the ground attachment condition respectively. The AVL Cruise is applied to verify the theoretical model. The climbing degree of AWD, front drive and rear drive SUV with the same vehicle parameters are compared. To enhance the climbing performance, the genetic algorithm is used to optimize vehicle parameters. The results show that the climbing degree of AWD drive is better than that of the front and rear drive with the same vehicle parameters, and the optimization algorithm can significantly improve the climbing performance under the constraint of fuel economy. all wheel drive SUV; climbing performance; fuel economy; genetic optimization 2017-07-09 国家自然科学基金资助项目(11202096,51775269);江苏省高校自然科学基金资助项目(kfjj20170222);汽车零部件先进制造技术教育部重点实验室开放课题基金资助项目(2016KLMT05);中央高校基本科研业务费专项基金资助项目(NS2016025); 南京航空航天大学研究生创新基地(实验室)开放基金资助项目(kfjj20170222) 陈国钰(1993—),男,湖北人,硕士,主要从事汽车电子及车辆动力学与控制研究,E-mail:973310733@qq.com; 通讯作者 金智林(1978—),男,江西人,博士后,副教授,主要从事汽车电子、动力学与控制以及车辆主动安全控制研究,E-mail:jinzhilin@nuaa.edu.cn。 陈国钰,金智林,王铭.全时四驱SUV爬坡性能分析与优化[J].重庆理工大学学报(自然科学),2017(12):8-14. formatCHEN Guoyu,JIN Zhilin,WANG Ming.Analysis and Optimization of Climbing Performance for an All Wheel Drive SUV[J].Journal of Chongqing University of Technology(Natural Science),2017(12):8-14. 10.3969/j.issn.1674-8425(z).2017.12.002 U462.3;U270.1+1 A 1674-8425(2017)12-0008-07 (责任编辑刘 舸)



2 四驱SUV爬坡性能仿真分析
2.1 四驱SUV建模

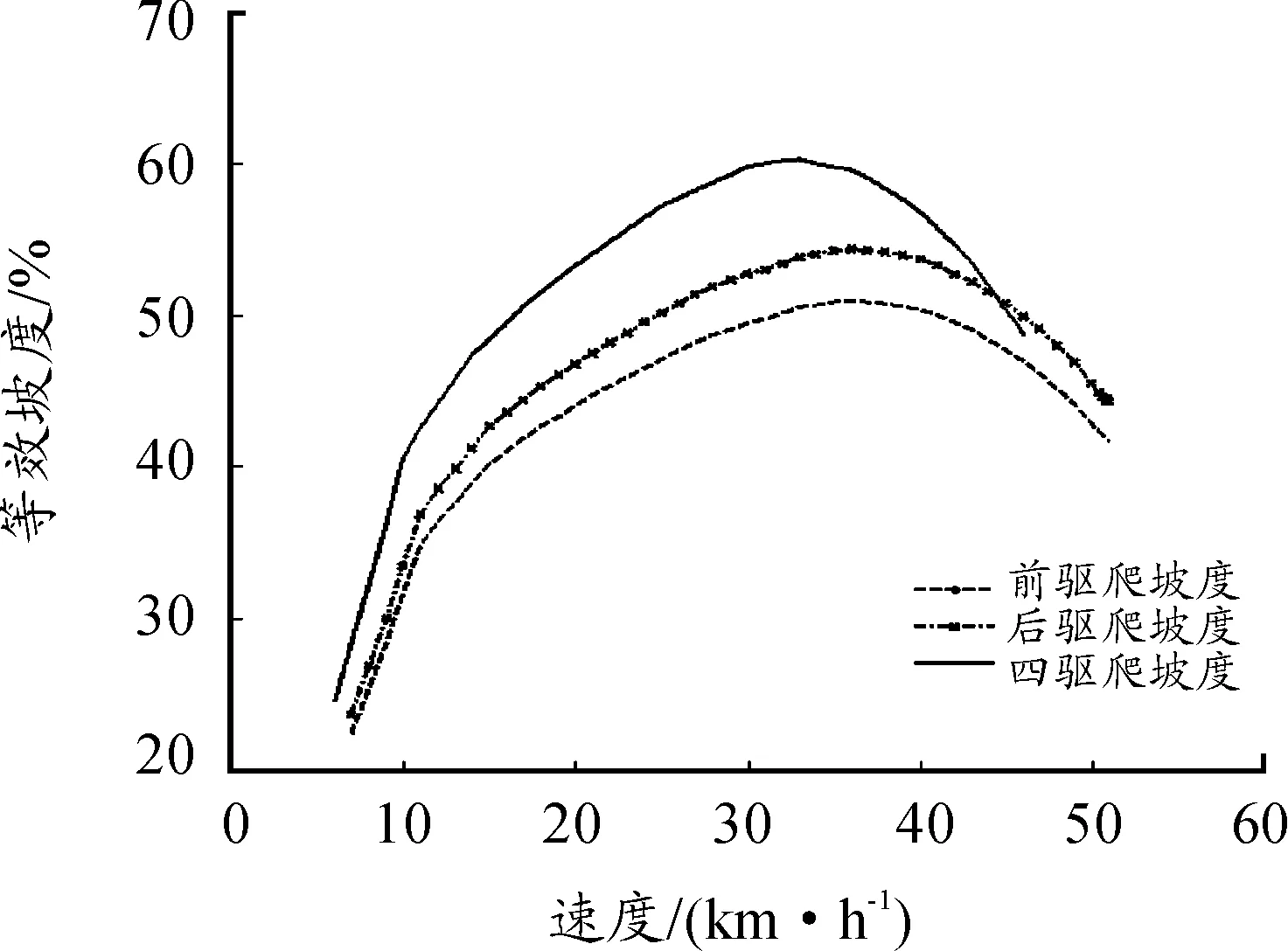
2.2 仿真结果分析

3 四驱SUV爬坡性能优化
3.1 优化算法设计

3.2 优化结果分析
4 结论
猜你喜欢
房地产导刊(2022年4期)2022-04-19汽车工程师(2021年12期)2022-01-17汽车工程师(2021年11期)2021-12-21建材发展导向(2021年15期)2021-11-05当代陕西(2021年13期)2021-08-06石油化工管理干部学院学报(2020年5期)2020-12-14当代工人(2020年1期)2020-05-11国际木业(2016年10期)2016-12-21中国环境监察(2016年11期)2016-10-24中国火炬(2015年1期)2015-07-25