张力腿平台湿拖稳性及拖航阻力分析
2018-01-09 02:26陈国龙
海洋工程装备与技术 2017年5期
杨 旭, 陈国龙, 范 模, 谭 越
(中海油研究总院, 北京 100028)
张力腿平台湿拖稳性及拖航阻力分析
杨 旭, 陈国龙, 范 模, 谭 越
(中海油研究总院, 北京 100028)
张力腿平台是深海浮式平台的一种重要形式,在中国南海尚无应用。运用MOSES软件分析了适用于中国南海的张力腿平台湿拖工况下的浮性和稳性,估算拖航阻力,并进行规范校核。研究结果可为张力腿平台设计提供参考。
张力腿平台;稳性;拖航阻力
0 引 言
张力腿平台(TLP)是深海浮式平台的一种重要形式。它通过自身结构形式,产生远大于结构自重的浮力,浮力除抵消自重外,剩余的浮力与预张力平衡,使张力腿平台时刻处于受拉绷紧状态。张力腿平台具有运动性能好、可干式采油的优点[1]。目前,国内尚无张力腿平台应用案例,对其研究也较少,但随着我国海洋油气开发逐步迈向深海,张力腿平台将拥有广阔的发展前景。
张力腿平台的运输方式一般分为干拖和湿拖两种。干拖方案是将平台装载于运输船上,以拖船拖曳无动力驳船或自航运输船,运输到指定海域进行卸船安装。而湿拖则是将平台漂浮于海中,运用拖船进行拖曳运输到指定海域,再调节平台压载进行安装准备。运输方式的比选需要考虑运输船舶资源、动复员地点和价格、运输能力、装船
及卸船方式、拖航稳性、拖航强度、拖航运动性能、运输疲劳损伤、运输窗口期等多种因素。本文以中国南海为目标海域,设计一座张力腿平台,并对其进行湿拖工况下的浮性、稳性及拖航阻力分析。通过计算分析,证实了该平台湿拖方案的可行性,可将湿拖方式作为该张力腿平台运输方案之一。
1 张力腿平台模型
1.1 张力腿平台主要参数
1.1.1张力腿平台主尺度
以中国南海油田为目标区域,设计一座张力腿平台,平台形式为经典张力腿平台,设计工作水深400m,设计工作排水量50130t,其主要参数如表1所示。平台主体结构如图1所示。
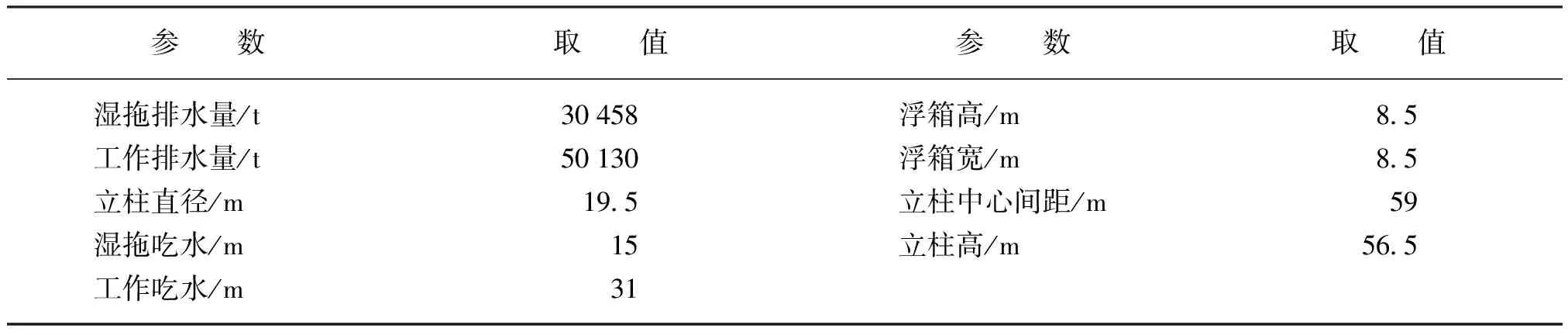
表1 TLP主要参数Table 1 Hull principal parameters of the TLP

图1 TLP主体结构图Fig.1 Structure diagram of the TLP hull
1.1.2环境条件
假设张力腿平台的建造场地为山东某地,湿拖工况需考虑平台从山东场地至南海海域的环境条件,湿拖工况选择十年一遇的极限环境条件,如表2所示。
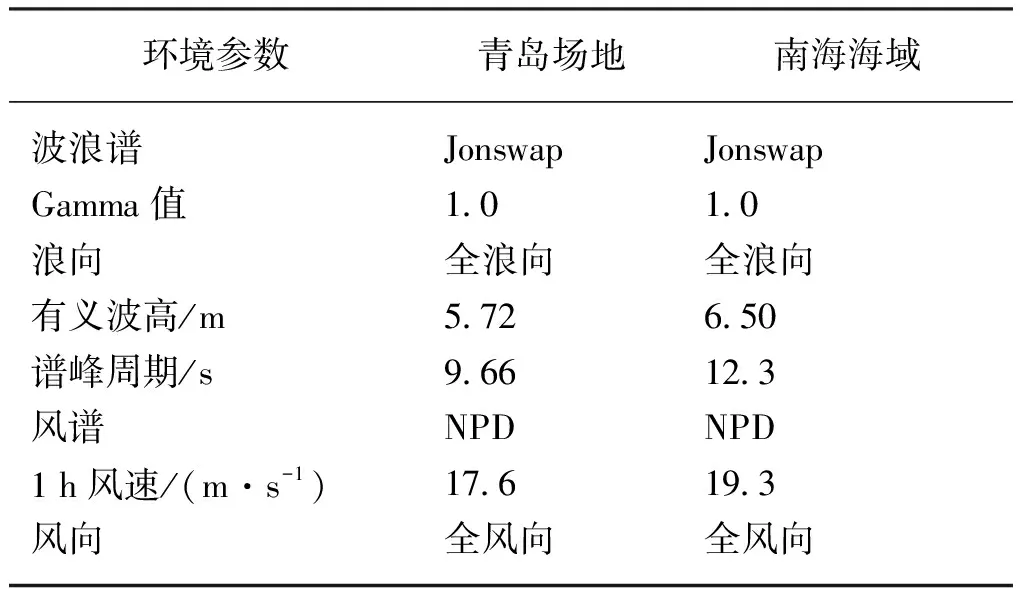
表2 相关海域环境条件Table 2 Environmental conditions
此外,还需考虑拖航过程中的水深影响,其中拖航需要经过台湾海峡,水深较浅,拖航工况下吃水不宜过大。
1.1.3受风面积
平台有效受风面积是根据国际海事组织(IMO)稳性规范[2],对平台水线以上的模块进行分类,再乘以高度系数Ch和形状系数Cs,最终得到TLP平台有效受风面积。
1.1.4舱室分布
TLP平台需要进行分舱压载调节,舱室分布设计如图2所示。在拖航状态下,吃水较浅,仅应用最下层压载舱进行压载分配。
1.1.5进水点
稳性分析中,还需考虑平台的进水点,根据张力腿平台结构设计了平台进水点,位于立柱内侧甲板下方,如图3所示。
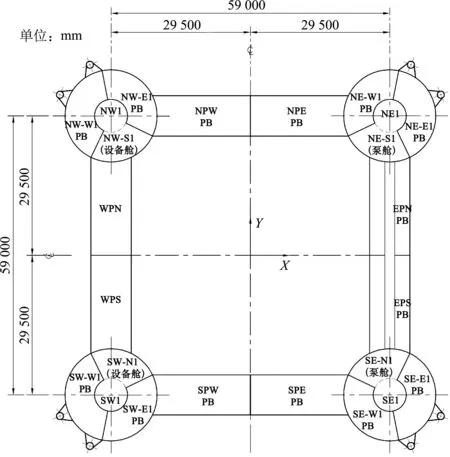
图2 舱室分布示意图Fig.2 Schematic diagram of compartment arrangement

图3 进水点位置示意图Fig.3 Location of down flooding points
2 张力腿平台拖航稳性分析
2.1 张力腿平台拖航稳性校核标准
在湿拖过程中的稳性校核主要参考IMO和美国船级社(ABS)规范[2—4], 将稳性工况分成破舱和完整稳性两种情况,规范要求如表3所示。

表3 稳性规范要求Table 3 Stability check requirement
(续表)
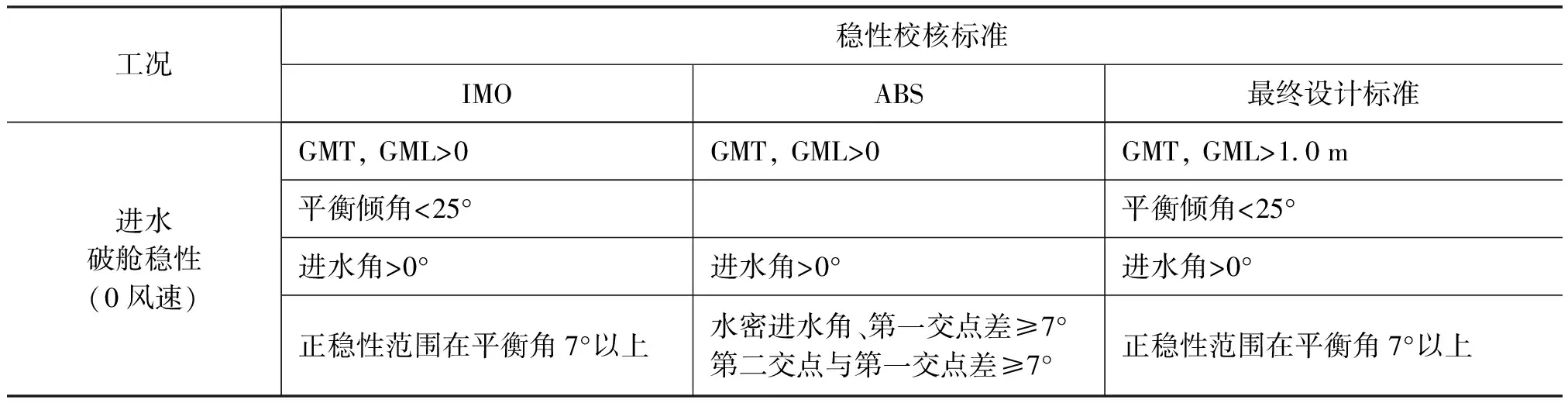
工况稳性校核标准IMOABS最终设计标准进水破舱稳性(0风速)GMT,GML>0GMT,GML>0GMT,GML>10m平衡倾角<25°平衡倾角<25°进水角>0°进水角>0°进水角>0°正稳性范围在平衡角7°以上水密进水角、第一交点差≥7°第二交点与第一交点差≥7°正稳性范围在平衡角7°以上
注: GMT和GML分别为横稳心高和纵稳心高。
除上述要求外,规范还对需要进行破舱稳性分析的舱室做了详细描述。
2.2 张力腿平台模型建立
本文通过MOSES软件进行浮态计算、压载计算及稳性计算。首先运用MOSES软件根据上文所述平台结构建立平台模型和舱室内部模型,如图4所示。在湿拖工况下,吃水较浅,主要应用最下层压载舱进行压载分配。
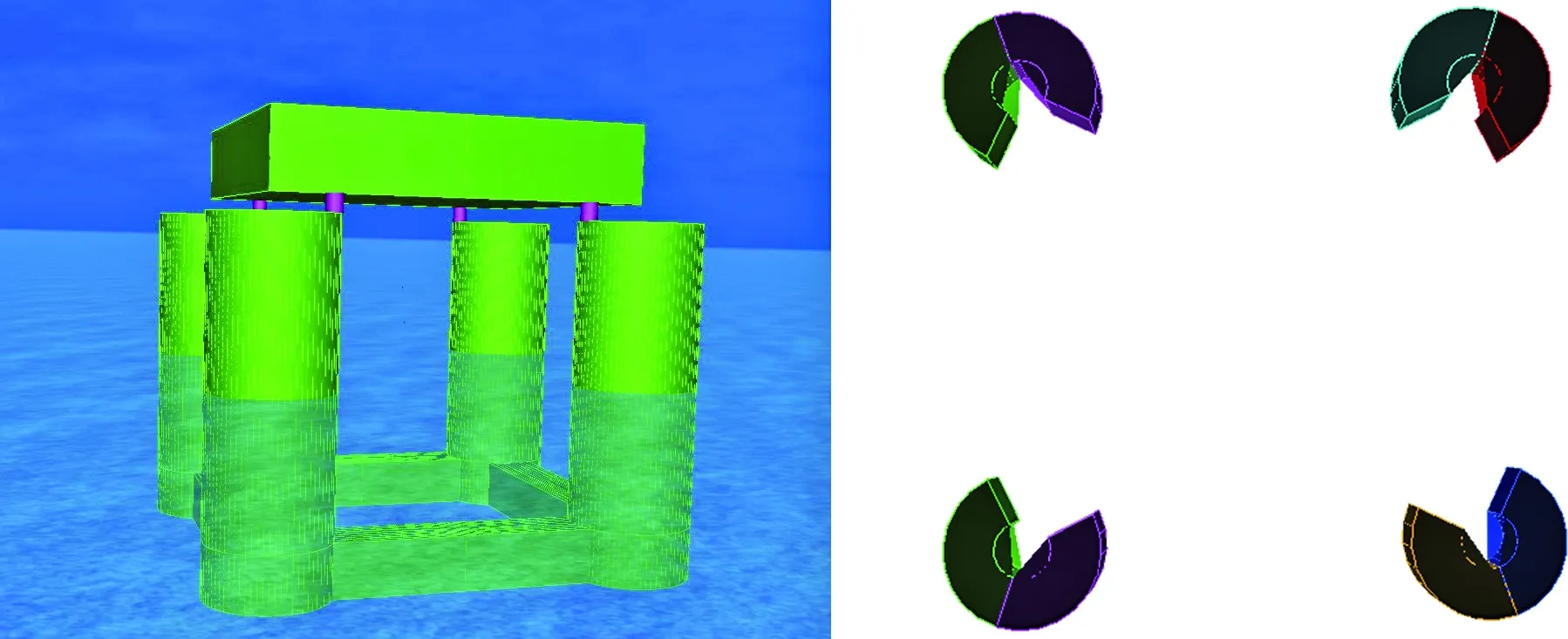
图4 TLP平台MOSES模型Fig.4 MOSES model of TLP
2.3 浮态计算
根据湿拖工况下的吃水对平台进行压载分析,得到重量分布,如表4所示。
2.4 稳性校核
根据规范校核了拖航状态下完整工况、单舱室破舱、双舱室破舱三种情况下的稳性,同时考虑了风向从0°到180°每隔15°的变化。得到完整工况下的稳性结果如表5所示,碰撞破舱稳性如表6所示,进水破舱稳性如表7所示。经过分析,全部拖航稳性结果均符合规范要求。完整状态下稳心高3.48m。

表4 TLP湿拖工况重量分布Table 4 Weight control of the TLP on wet-tow condition
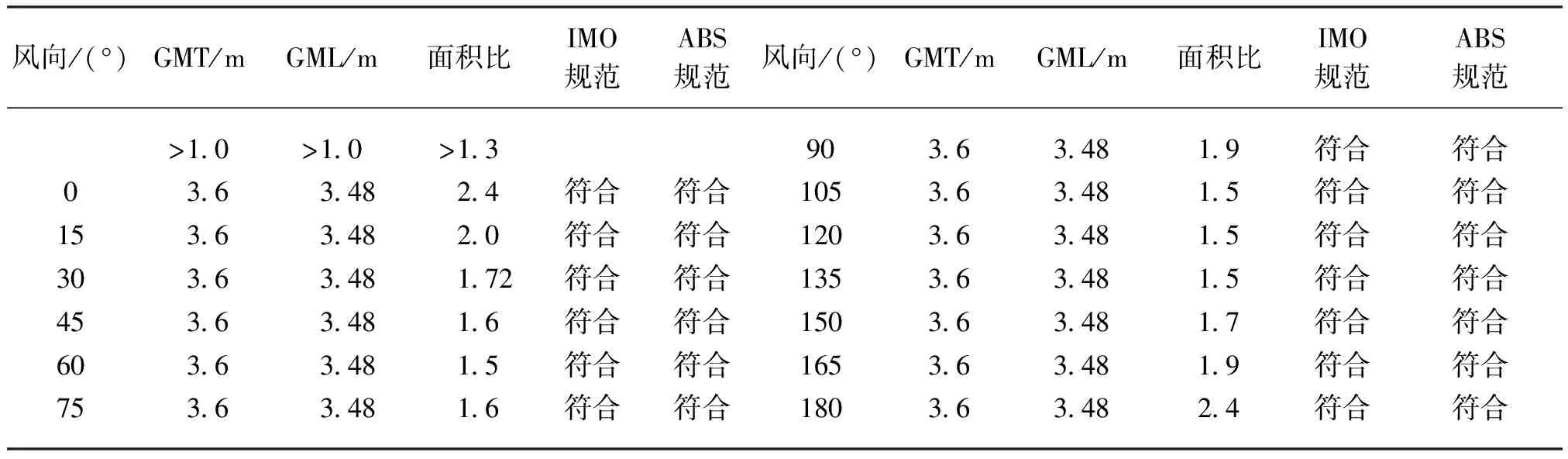
表5 完整工况TLP稳性校核结果
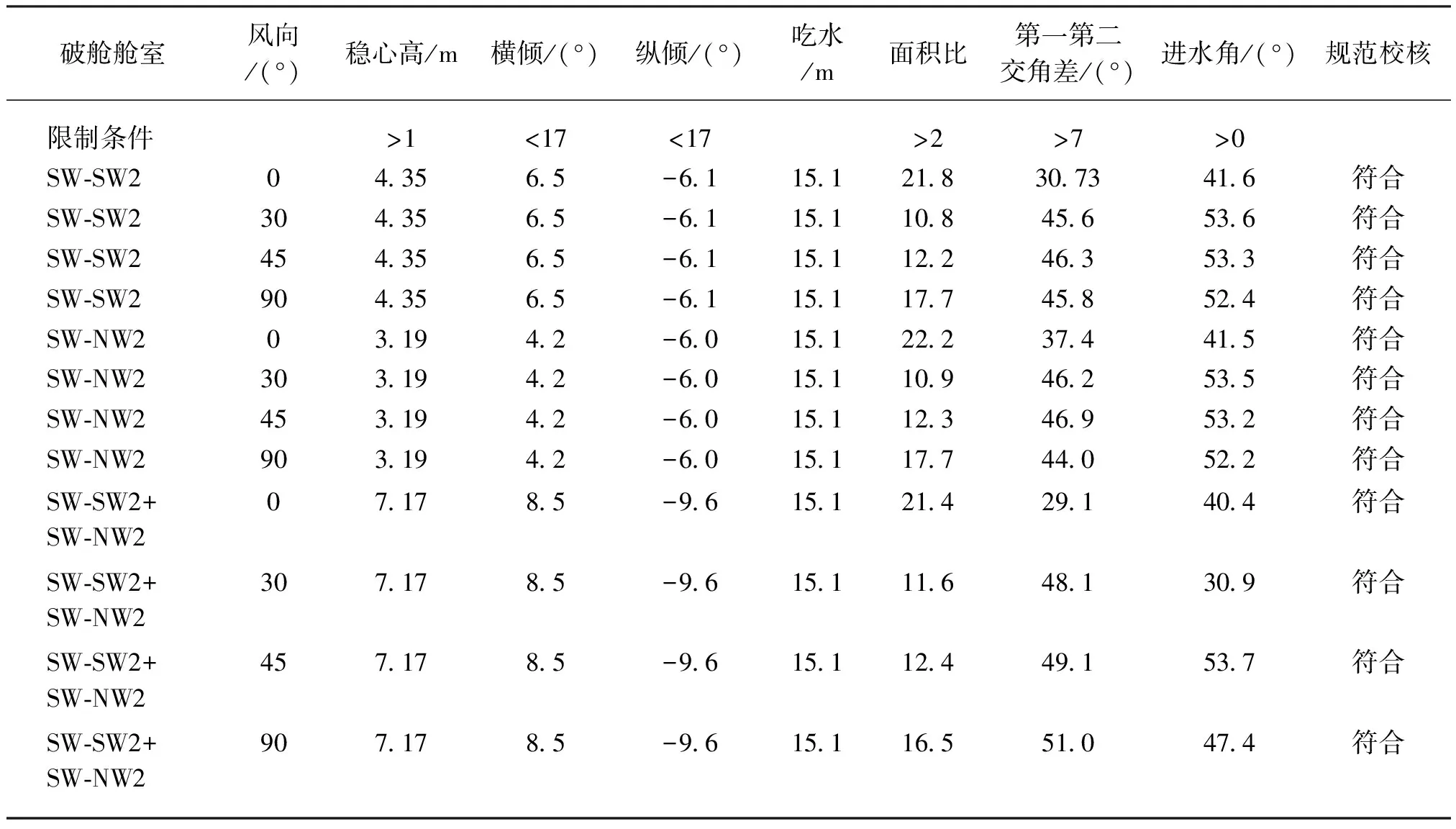
表6 碰撞破舱稳性校核结果Table 6 Collision damage stability check results of the TLP

表7 浸水破舱稳性计算结果Table 7 Flooding condition stability check results of the TLP
3 张力腿平台拖航阻力分析
3.1 拖航阻力估算方法
选择中国船级社(CCS)海上拖航指南(1997)中的拖航阻力估算方法[5]进行阻力估算。
对于钻井平台这类受风面积较大的平台,海上拖航的总阻力由两个经验公式计算,取其中较大值。
经验公式之一将总阻力分为被拖船和拖船的摩擦阻力与剩余阻力:
RT=1.15[Rf+RB+(Rft+RBt)],
(1)
式中:Rf为被拖船的摩擦阻力;RB为被拖船的剩余阻力;Rft为拖船的摩擦阻力;RBt为拖船的剩余阻力。
另一个公式为
∑R=0.7(Rf+RB)+Ra(kN),
(2)
式中:Ra为空气阻力;其他参数意义同式(1)。式(1)与式(2)中具体阻力的求解参见CCS规范。由于TLP平台并非传统船型,若按照常规方法可能计算不准,为此,将受到流载荷作用的区域进行分块求解,再将每一部分进行相加,得到拖航阻力。根据相关公式,编写Excel表格,建立公式,通过输入指定参数即可求得平台的拖航阻力。
3.2 拖航阻力试验
为更准确地确定张力腿平台拖航阻力,在哈尔
滨气动院进行了张力腿平台模型风洞试验,模型比例1∶150,采用风洞试验结果估算拖航状态下风载荷。
此外,在上海交通大学水池进行了涡激运动(VIM)试验,试验结果显示VIM试验所得流载荷大于风洞试验估算流载荷。因此对于流载荷采用VIM试验所得结果。VIM试验比例为1∶50。通过风洞试验和VIM试验组合得到拖航阻力试验估算结果。
3.3 拖航阻力结果
通过规范估算拖航阻力和试验估算拖航阻力,得到不同航速和风向下两种方法得出的拖航阻力,如表8所示;其对比如图5所示。单从规范方法来看,绝大多数情况均为式(2)结果较大,这说明对于张力腿平台,空气阻力占比较大。比较规范估算方法和试验估算方法可发现,在低航速下两者结果较为接近,但随着航速的提高,两者差距越来越大。分析差异原因可发现VIM试验流力是造成试验拖航阻力显著增加的原因。造成试验结果增长较快的原因可能是VIM流载荷过大,而原规范中多数以船型为基础设计,并没有考虑涡激运动载荷。因此,对于张力腿平台拖航阻力分析,涡激运动载荷是今后需重点考虑和关注的内容。还需在下一步工作中加入数值模拟对比,分析差异原因。

表8 拖航阻力对比Table 8 Wet tow resistance
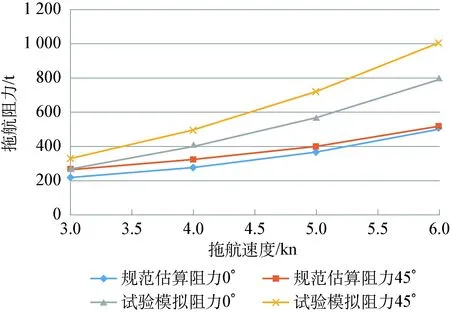
图5 TLP平台拖航阻力Fig.5 Wet-towing resistance of TLP
4 结 语
本文以一座适用于中国南海400m水深的张力腿平台为目标,采用十年一遇的拖航环境条件,运用MOSES软件进行该平台拖航状态下浮态、压载及稳性分析,并进行了规范校核。结果表明该张力腿平台浮性、完整稳性及破舱稳性均满足相关规范,浮性及稳性满足湿拖要求。此外,运用拖航相关规范估算拖航阻力,对比了风洞试验及VIM涡激运动试验组合得到的拖航阻力试验结果, 结果表明VIM试验流载荷在张力腿平台拖航阻力中占比较大,而原有规范基于船型得到的估算公式可能对这一部分阻力考虑较少。下一步需进行数值模拟研究并与试验进行对比,确定VIM涡激运动载荷对张力腿平台湿拖阻力的影响。
[1] 董艳秋,胡志敏,马驰.深水张力腿平台的结构形式[J].中国海洋平台,2000,15(5): 1.
Dong Yan-qiu, Hu Zhi-min, Ma Chi. The structure types of deepwater TLP [J]. China Offshore Platform, 2000,15(5): 1.
[2] International Maritime Organization. International code on intact stability [S]. 2008.
[3] International Maritime Organization. Code for the construction and equipment of mobile offshore drilling units [S]. 2001.
[4] American Bureau of Shipping. Rules for building and classing mobile offshore drilling units [S]. 2015.
[5] 中国船级社.海上拖航指南[S].1997.
China Classification Society. The guideline for towage at sea [S]. 1997.
StabilityAnalysisandWet-TowingResistanceofaTensionLegPlatform
YANG Xu, CHEN Guo-long, FAN Mo, TAN Yue
(CNOOCResearchInstitute,Beijing100028,China)
Tension leg platform (TLP) is an important type of deepwater floating platform which has not been applied in the South China Sea. We analyze buoyancy and stability performance of a TLP with MOSES software, estimate towing resistance and check the results according to the related rules. The results can give reference to the design of TLP.
tension leg platform (TLP); stability; towing resistance
2017-03-15
杨旭(1987—),男,博士,工程师,主要从事海洋工程结构物方面的研究。
U674.38+1
A
2095-7297(2017)05-0300-07
猜你喜欢
大电机技术(2022年5期)2022-11-17
舰船科学技术(2022年10期)2022-06-17
珠江水运(2020年21期)2020-12-01
珠江水运(2020年16期)2020-09-16
中国交通信息化(2020年12期)2020-02-06
中国交通信息化(2019年7期)2019-10-08
船舶标准化工程师(2019年4期)2019-07-24
天津职业院校联合学报(2014年2期)2014-09-20
船海工程(2013年6期)2013-03-11
中国船检(2011年10期)2011-08-04