
基于专家控制器的电动汽车感应电机弱磁区优化控制研究*
2018-01-05 04:39:09李家荣
电机与控制应用 2017年12期
李家荣
(盐城工学院 电气工程学院,江苏 盐城 224051)
基于专家控制器的电动汽车感应电机弱磁区优化控制研究*
李家荣
(盐城工学院 电气工程学院,江苏 盐城 224051)
由于感应电机驱动系统采用数字控制器和脉宽调制输出会伴随着数字延迟的问题,加之参数可能存在的扰动,使得传统的间接磁场定向控制方法在感应电机高速弱磁区的控制性能降低。针对此问题,提出了一种基于专家控制器和模糊推理机制的感应电机弱磁区优化控制策略。考虑到传统间接磁场定向控制中电流调节器在弱磁区若没有获得适合的电流参考指令,则可能会产生高频振荡乃至失稳。因此,在传统方法的基础上将转速闭环输出的电流参考先送入到专家控制器,专家控制器基于数据库和模糊推理,对电流参考进行修正,其中模糊推理机制基于简单的高斯函数逻辑实现。最后,构建了感应电机驱动试验平台,开展了电机在弱磁区的高速驱动试验,试验结果验证了新型控制策略的有效性。
电动汽车;感应电机;专家控制器;弱磁;模糊推理
0 引 言
由感应电机(Induction Motor,IM)为主体的电力传动系统具有可靠性高、生命周期长、维护简单和成本低等优点,被广泛用于混动电动汽车和纯电动汽车[1-3]。IM驱动系统典型的间接磁场定向控制(Indirect Field Oriented Control,IFOC)框图如图1所示。
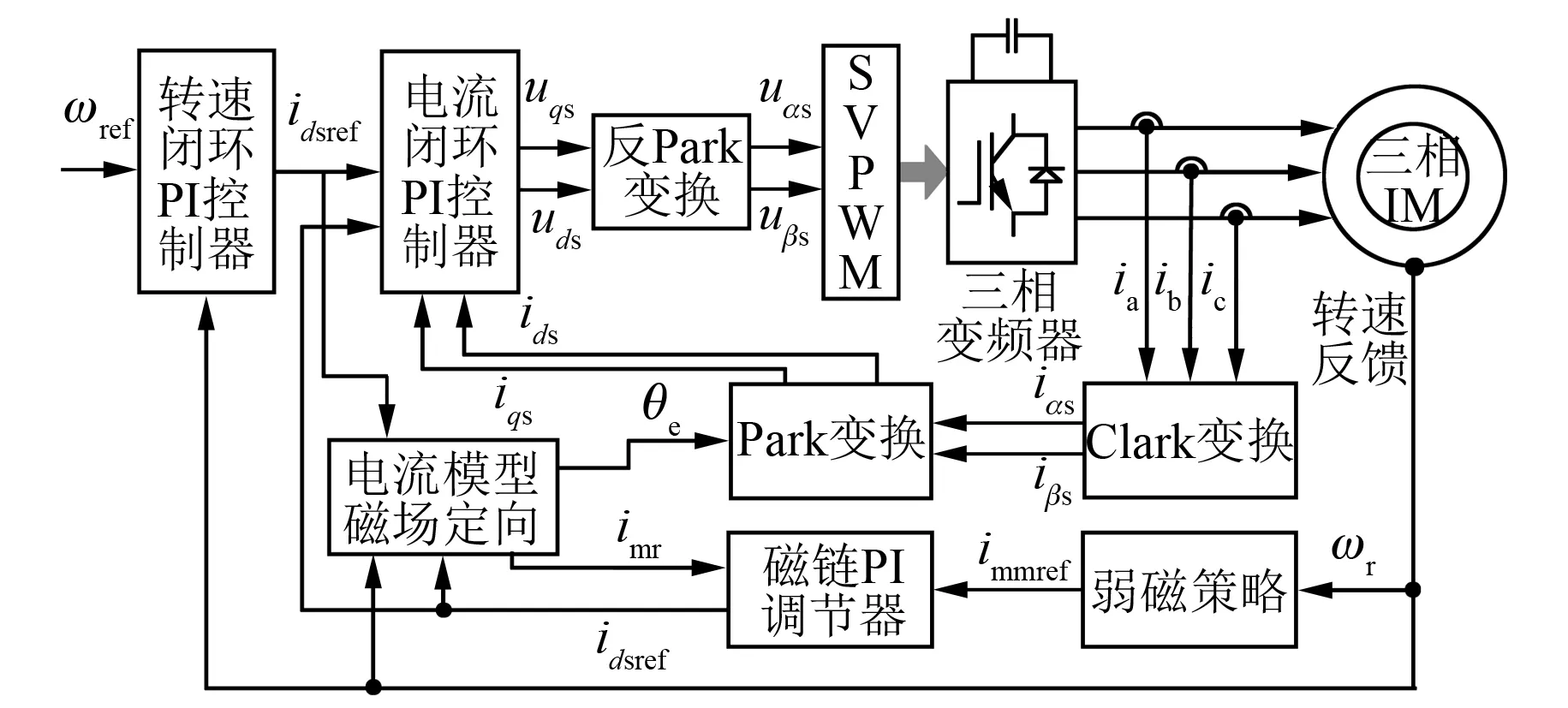
图1 典型的包含弱磁控制的IM间接磁场定向控制框图
从图1中可以看出,当IM超出额定转速时,一般采用弱磁控制策略来提高性能,但是目前大部分弱磁控制研究集中在3倍额定转速以内的范围,且主要的研究集中在弱磁调速策略优化或电流调节器设计[4-7]。在弱磁区,定子dq轴电流ids和iqs对转矩有重要的影响[8-10],一般有两个弱磁优化途径能实现最大转矩:第一个是基于IM的参数计算ids和iqs[11];第二是利用电压和磁链调节器来选择ids和iqs[12-13]。理论上这些弱磁策略可以实现最大转矩能力,但第一种策略对电机参数高度依赖,当温度变化或其他因素导致电机参数摄动时将很难达到期望的控制性能,而第二种策略对电机参数鲁棒性较高,尽管计算复杂,但依然是目前较有效的方法。
在IFOC系统中采用了磁场定向旋转坐标变换,使得交流信号转变成为直流信号,从而实现了PI调节器的无静差控制。然而,ids和iqs之间还是存在交叉耦合,并与基频成正比,导致了电流调节器的性能随着基频的增加而减弱[14]。因此文献[15]在控制器中引入了复杂的内模控制和广义传递函数矩阵以消除交叉耦合的影响。虽然采用磁场定向和旋转坐标变换使得ids和iqs解耦,但温度和弱磁导致的参数扰动将使PI调节器的带宽降低[16-17],同时数字控制器和脉宽调制导致的数字延迟进一步降低了控制器的性能。在高速弱磁区域,即5~6倍额定转速时,传统的间接磁场定向控制方法难以达到目标性能,甚至电流调节器有可能失稳而进一步造成变频器的功率单元过流损坏。
本文在上述文献研究基础上,重点研究了如何提高在高速弱磁工况下的电流控制的稳定性,提出了一种基于专家控制器的电动汽车感应电机弱磁区优化控制策略。该方法的主要特点是基于传统间接磁场定向控制,在电流调节器输入前增加专家控制器来处理不合理的快速电流参考变化,以增强实际电流跟踪参考电流的能力。考虑到无效目标导致专家控制器调节失败的可能,在控制器中还增加一个环节,使得调节失败时,输出一个次优的电流指令保持系统正常运行。最后,基于感应电机驱动试验平台,对新型弱磁控制器的性能进行了试验验证。
1 弱磁控制策略
基本的弱磁策略是将激磁电流ids设置为与转速成反比,同时磁链大小根据工况人为设置,这在工程应用中很容易实现,是一种通用方案。但传统的弱磁策略没有考虑转矩优化,当设置的磁链太大时导致反电动势占比增大,从而效率下降,电机没有足够的转矩来升速。文献[6]将ids和iqs的值通过电压调节器计算得到,可实现最大转矩能力,同时具有对电机参数扰动的鲁棒性。然而,其需要两个额外的调节器,就增加了工程应用中的复杂度。
图2所示为改进型的弱磁策略框图,其中激磁电流与转速成反比,同时激磁电流由一个电压调节器进行校正,而umax是给调节器设置的上限。从图2中可以看出,该策略只需要一个PI调节器,更重要的是,当磁链较大时减小了对应的反电动势,同时提高了iqs的响应,并保持了电流调节器的鲁棒性。然而,该方案依然不能优化最大转矩能力,因为其不能根据电压限制修改iqs。
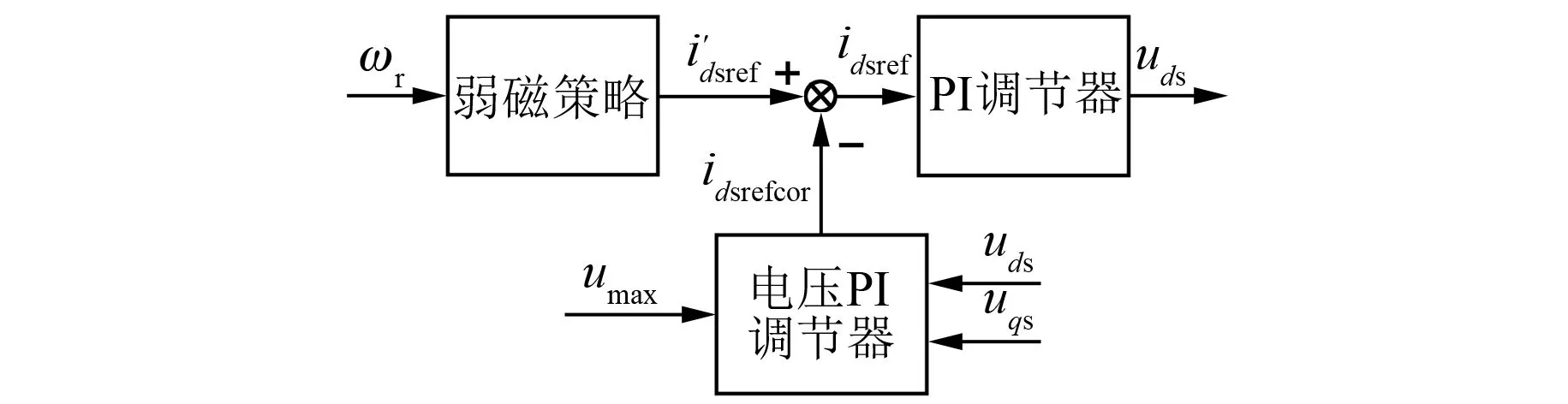
图2 改进型弱磁控制策略框图
大多数工程应用条件下,电压调节器设置一个小的积分参数就足够了,但考虑到低速时需要较大转矩和较快的iqs响应速度,比例和积分参数都需要设置。然而当参数太大,特别是积分参数太大时,d轴电流容易不稳定。因此,PI调节器的参数选择应遵循两个规则:(1)先设置一个小的积分参数;(2)如果响应慢,再设置一个小的比例参数。本文中遵循的上述规则设计了参数。
2 模糊推理专家控制器的设计
2. 1 IM模型
电流控制的稳定性取决于电流调节器带宽和输入电压信号。如前所述,电流调节器的带宽将在高速弱磁区降低,所以需要优化控制器。IM在dq旋转坐标下的数学模型为[18]
(1)

式中:uds和uqs——dq轴定子电压;
Rs——定子电阻;
ids和iqs——dq轴定子电流;
ψds——d轴定子磁链;
ωe——同步角速度;
Lm、Ls、Lr——激磁电感、定子电感和转子电感;
ψqs——q轴定子磁链。
通常,稳态条件下可忽略模型中微分项,但当电机动态时不能忽略,因为微分项对动态有重要影响,特别是当电机运行在高速弱磁区时,除去反电动势的电压是非常有限的。
为了提高电机运行在高速弱磁区的电流控制稳定性,设计了一种模糊推理专家控制器来处理电流参考值,然后再输出给电流PI调节器。专家控制器是基于带宽降低和电压限制设计的,其功能为:(1)在当前调节器带宽下,可以避免不合理的动态过程;(2)可以根据有效电压限制电流的范围。
2. 2 模糊推理专家控制器结构
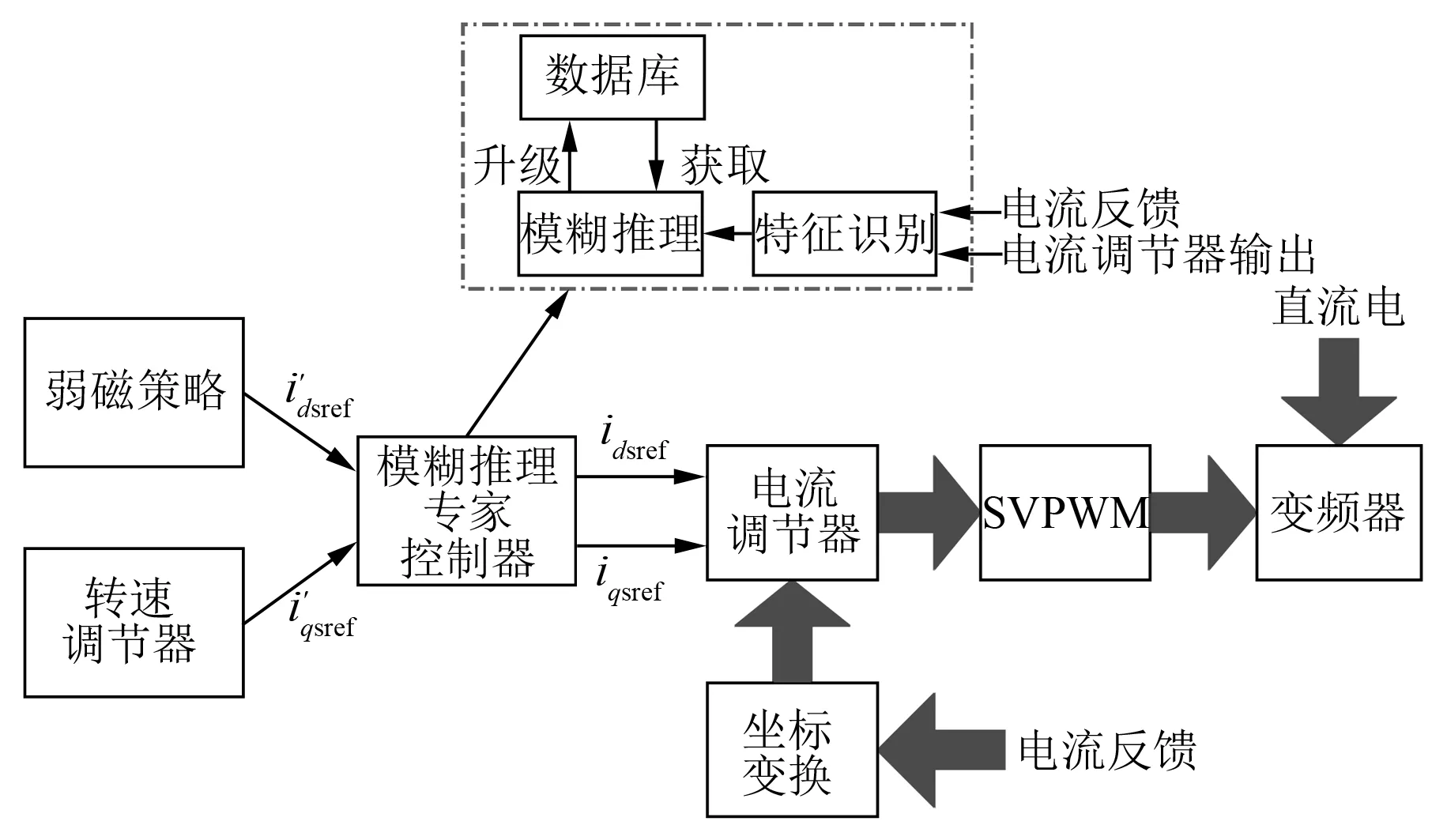
图3 模糊推理专家控制器框图
图3所示为模糊推理专家控制器结构。从图3中可以看出,专家控制器位于电流调节器之前,其输出给到电流调节器。专家控制器是基于模糊推理模块、数据库模块和特征识别模块构成的。
特征识别模块记录了idsfed、idsfed、uds和uqs的波形特征。当一个调整周期结束时,其计算出当前电流控制的特征,例如上升时间、超调和调节时间等,从而为模糊推理模块提供了相关依据。专家控制器数据库按照如下规律存储数据:如果当前电流参考指令变化太大,则记录idsfed和iqsfed具有的特征1和特征2等,以及uds和uqs;反之,则记录idsfed和iqsfed具有的特征3和特征4等,以及uds和uqs。因此,模糊推理过程是控制器基于数据库反向识别当前电流参考指令的过程。例如,如果idsfed和iqsfed具有特征1,则控制器的推理结果是当前电流参考指令太大,进一步将减小电流参考指令。模糊推理专家控制器的算法流程图如图4所示。
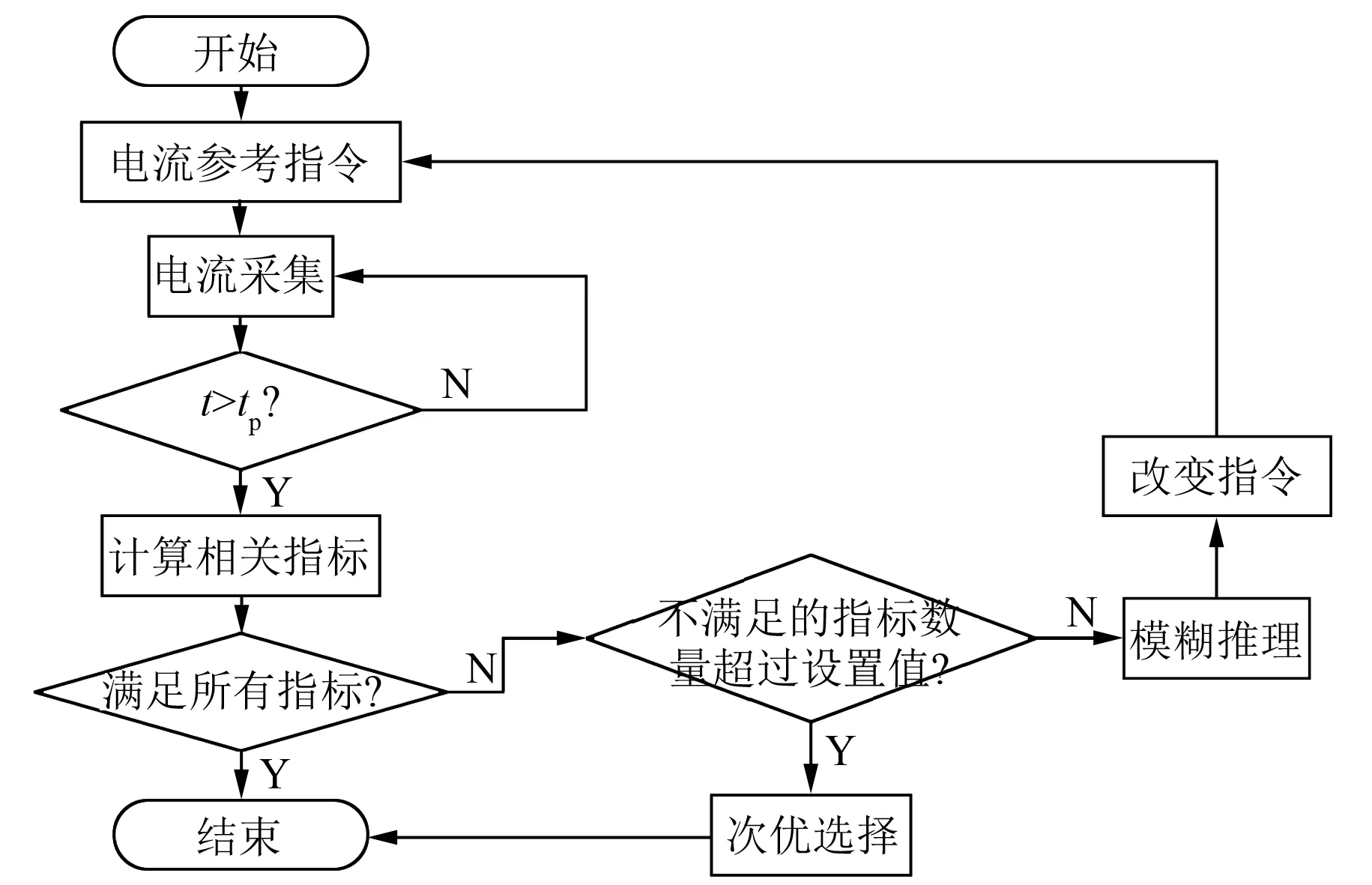
图4 基于模糊推理的专家控制器算法流程图
2. 3 特征识别模块
特征识别模块是专家控制器的基础。特征识别模块识别的特征包括上升时间、衰减率、振荡周期等,具体的识别方法包括数字滤波器、过零点检测等。如图5所示为一个典型的阶跃响应,其中时间点tz1、tz2、…、tz(i)、…为阶跃响应曲线与参考值r相交的时间点,而(tp1,yp1)、(tp2,yp2)、…、[tp(i),yp(i)]、…为极值点和对应的时间点。
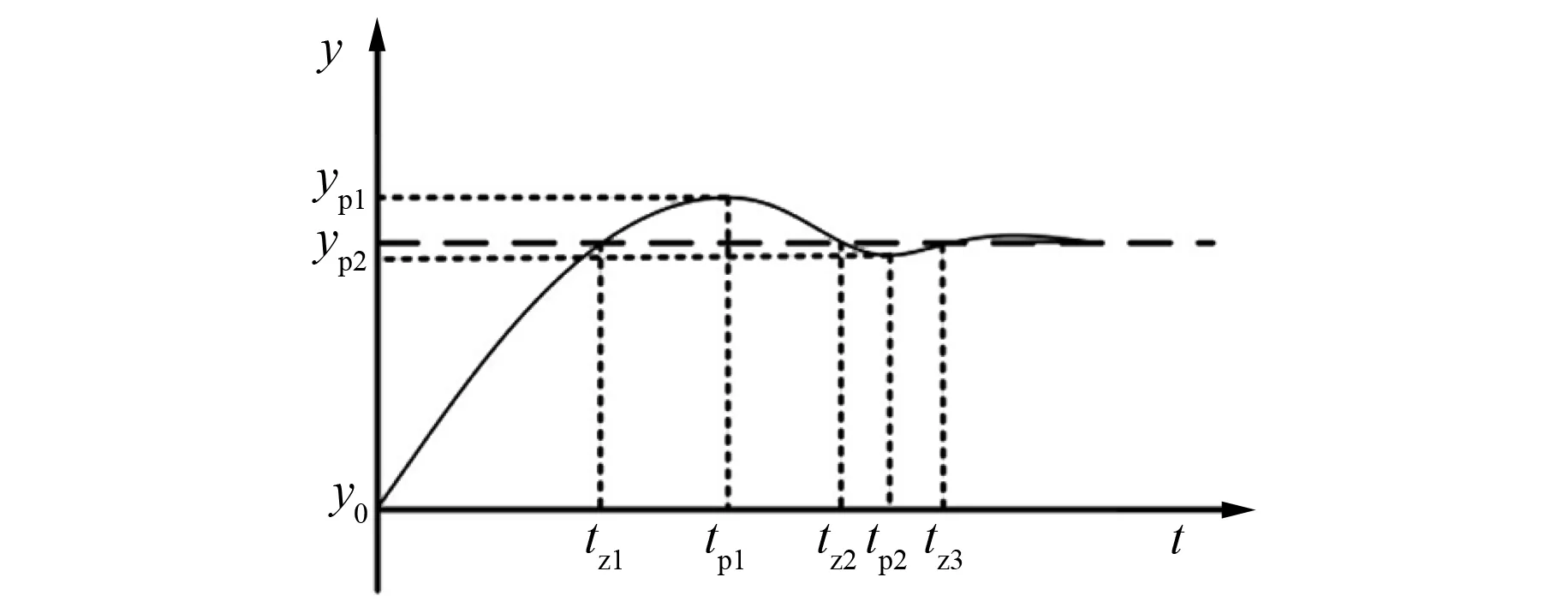
图5 典型的阶跃响应曲线

2. 4 数据库
专家控制器中的数据库存储专门的特征数据用于模糊推理,包括波形规律、操作规则等。如表1所示为数据库的表格形式。表1中rv(i,j)是特征值,而ev=[tr,OVR,OSC,ess,DMP,uOSC,uMon,uss]是特征指标。
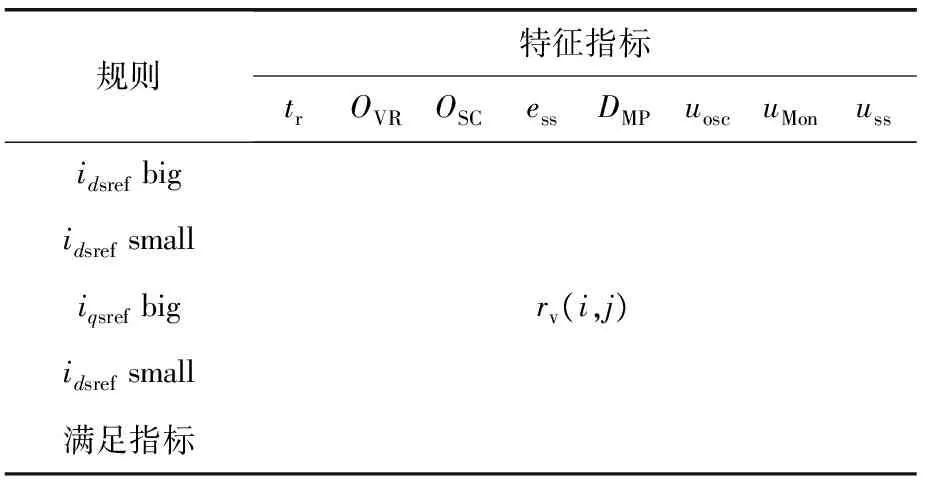
表1 专家控制器数据库表格
表1中的初始的特征值可以基于IM参数、控制器传递函数和工程经验获取。特征指标tr、ess和uss将根据采样得到的转速、电压、电流信息进行不断的更新,因为这三个特征指标受到这些采样变量的影响,而其他特征指标则不受影响。特征指标tr、ess和uss与速度、电压和电流之间的变化关系可根据工程经验获得,本文中采用了一些线性函数来在线更新tr、ess和uss。
(1) 转速高或母线电压低的时候,tr必须增加:
tr=tr0×(|ωr/ωbase|+UDCR/UDC)/2, (tr=tr0)(3)
式中:tr0——初值;
ωbase——转速基值;
UDCR——额定母线电压。
(2) 转速高或母线电压低或电流大的时候,ess必须减小:
ess=ess0×(|ωbase/ωr|+UDC/UDCR+
|ifed/ir|)/3, (ess0≥ess≥0)(4)
式中:ess0——初值;
ifed——反馈电流;
ir——电机额定电流。
(3) 母线电压低的时候,uss必须减小:
uss=uss0×(UDC/UDCR),
(uss0≥uss≥0)(5)
式中:uss0——初值。
2. 5 模糊推理机制

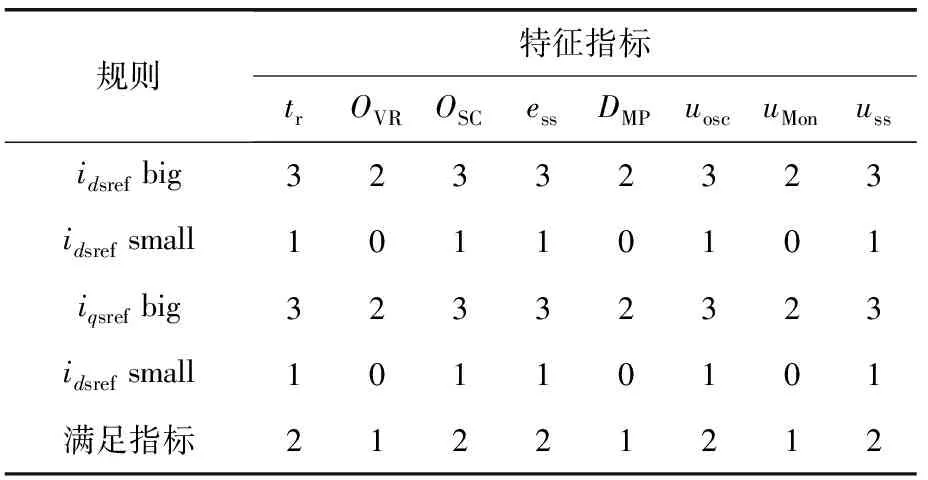
表2 高斯函数特征值类型和规则
定义uG(i)描述规则触发的程度:
(6)
式中:N——特征值的数量,本文中N=8;
GCoeffs(j)——对应特征值的权重系数,GCoeffs(j)≤1。
具体的GCoeffs(j)如表3所示。
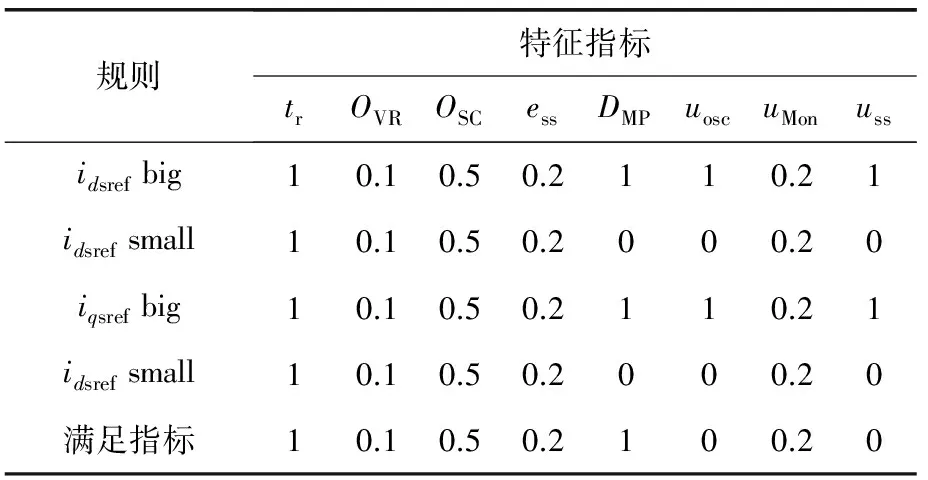
表3 特征值权重系数
定义Gid、Giq为idsref、iqsref的修正系数,具体的计算式为
Gid=uG(1)-uG(2)(7)
Giq=uG(3)-uG(4)(8)
从而idsref和iqsref的离散化计算式为
(9)

设Opt=uG(5)来表示性能一致性的程度。当Opt达到预期时(Opt>0.8),控制器停止调整。如果调整过程失败了,则选择一组具有最大Opt的次优参数。
3 仿真对比研究
为了分析新型控制策略较之传统间接磁场定向控制的优势,基于Saber仿真平台搭建了仿真模型进行了仿真对比研究。具体的仿真参数和试验平台参数一致,见下一节。图6、图7所示为转速从0增加到10 000 r/min时的仿真波形。其中图6(a)和图6(b)为在传统控制器作用下的电机输入相电流、电机转速、dq轴参考和反馈电流波形,而图7(a)和图7(b)为在新型控制器作用下的电机输入相电流、电机转速、dq轴参考和反馈电流波形。从图6中椭圆标记处可以看出,传统控制器作用下的电流跟踪误差较大,有一定的波动,而从图7中可以看出新型控制器电流跟踪效果较好,误差很小,没有明显振荡。
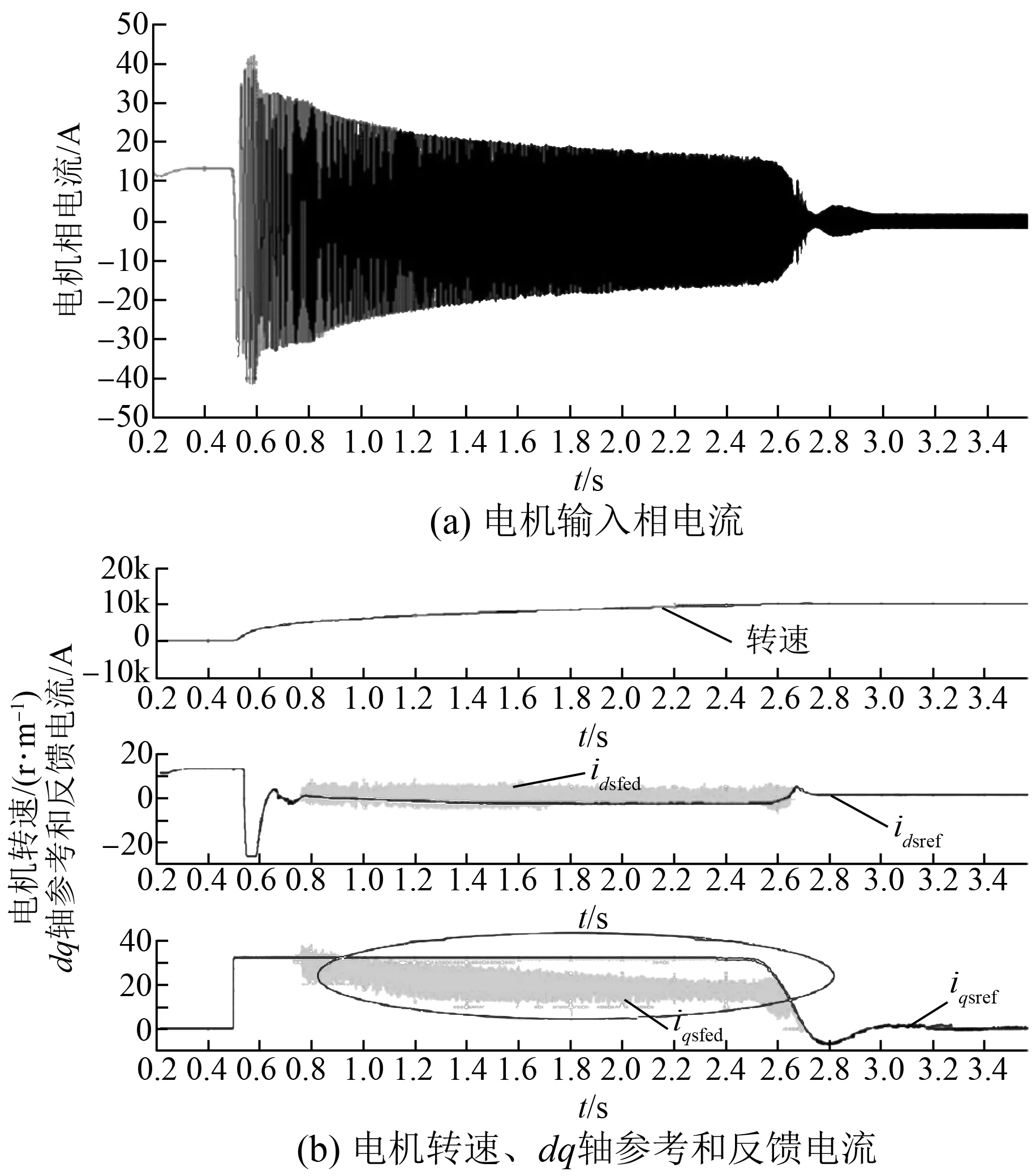
图6 转速从0增加到10 000 r/min时的仿真波形(传统控制策略)
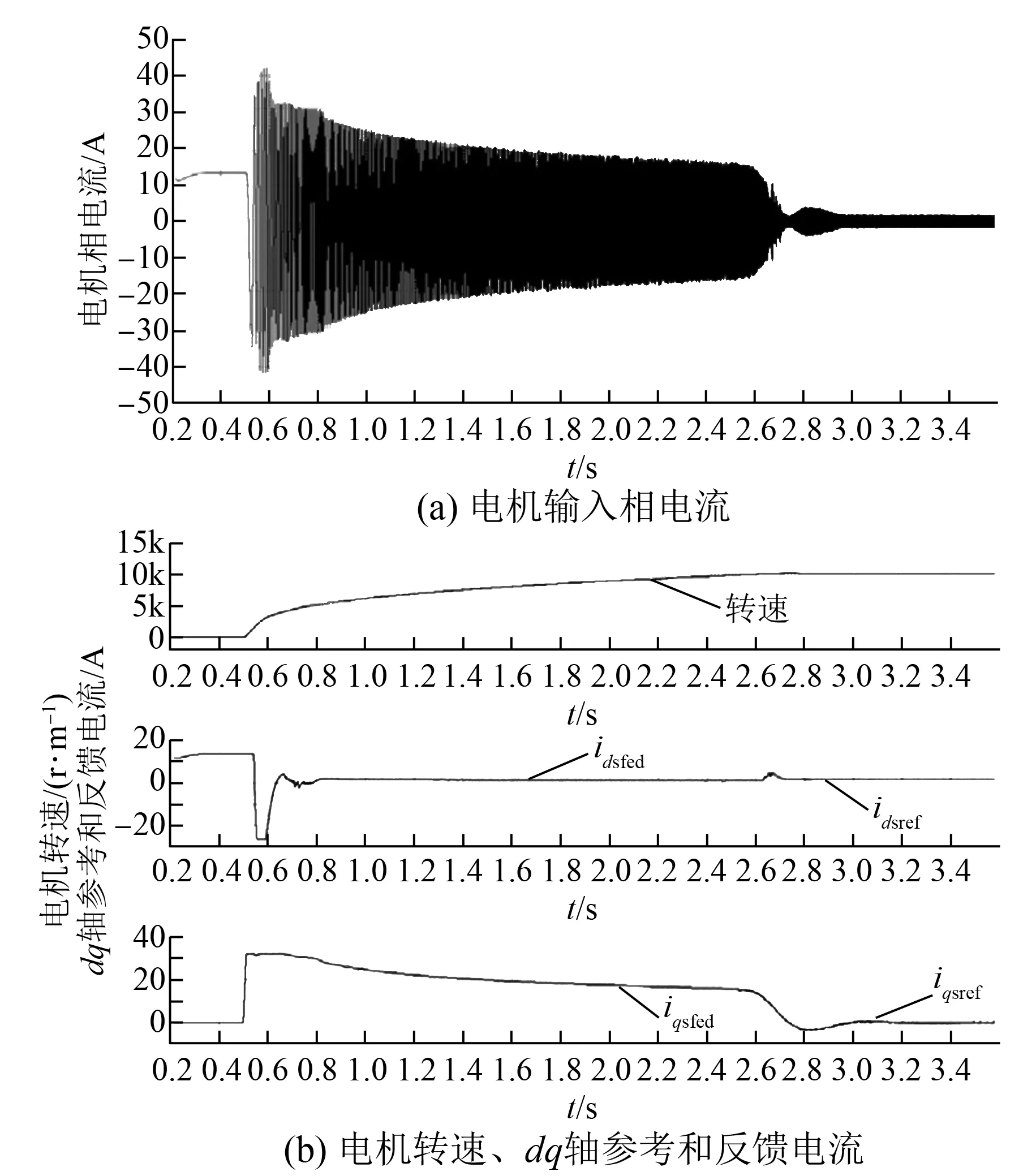
图7 转速从0增加到10 000 r/min时的仿真波形(新型控制策略)
图8所示为传统控制策略和新型控制策略作用下,电流阶跃指令(0~40 A)、同时转速等于8 000 r/min时的dq轴参考和反馈电流波形。从图8中可以看出,在传统控制作用下的电流跟踪误差较大,有明显的振荡。而在新型控制策略作用下,电流跟踪性能较好,没有振荡。
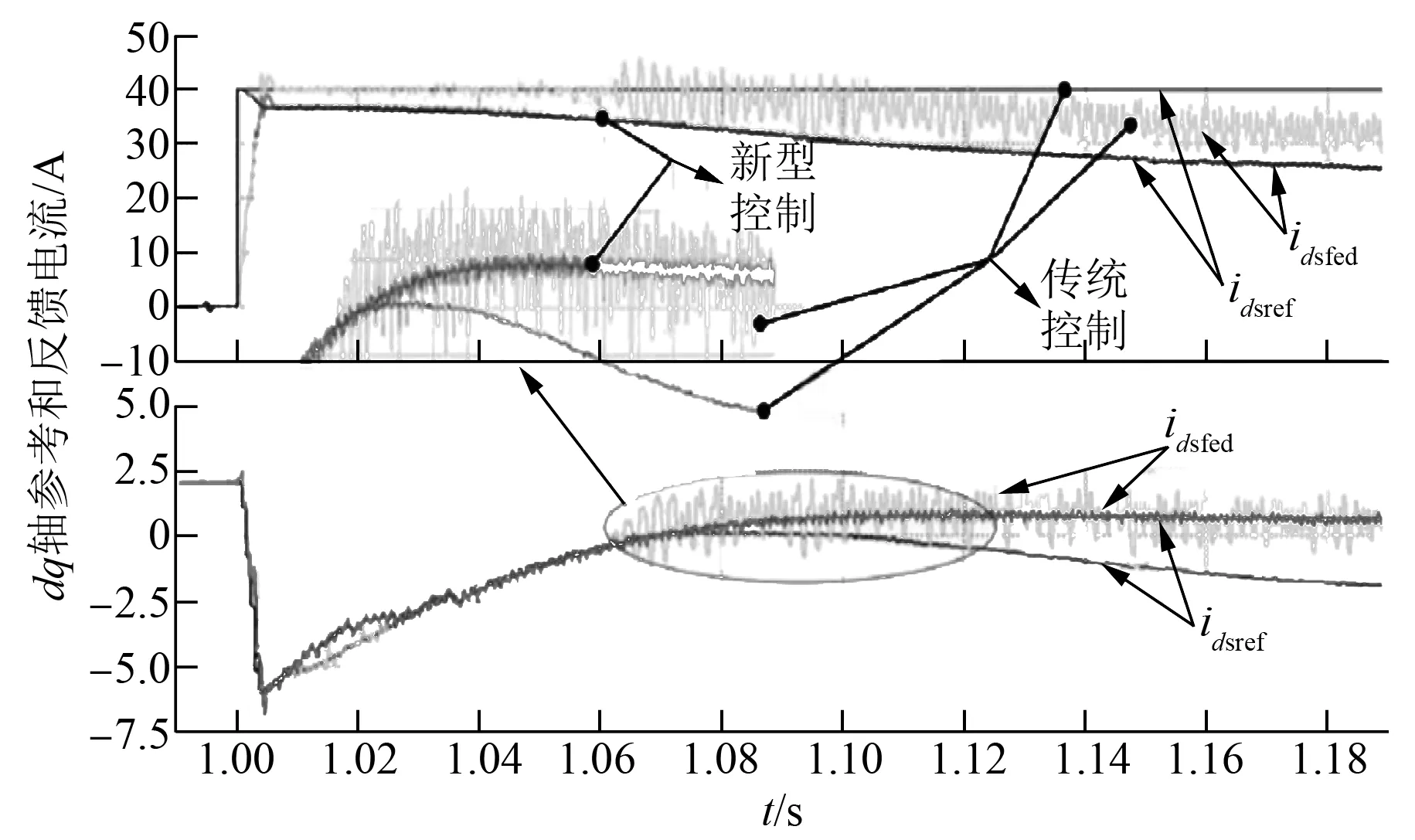
图8 电流阶跃指令时的仿真波形
图9所示为传统控制策略和新型控制策略作用下,转速等于8 000 r/min时的转矩响应波形。从图9中可以看出,新型控制策略作用下,转矩输出更为稳定,说明电流参考经由专家控制器处理后,电流调节器可以更加稳定地运行。
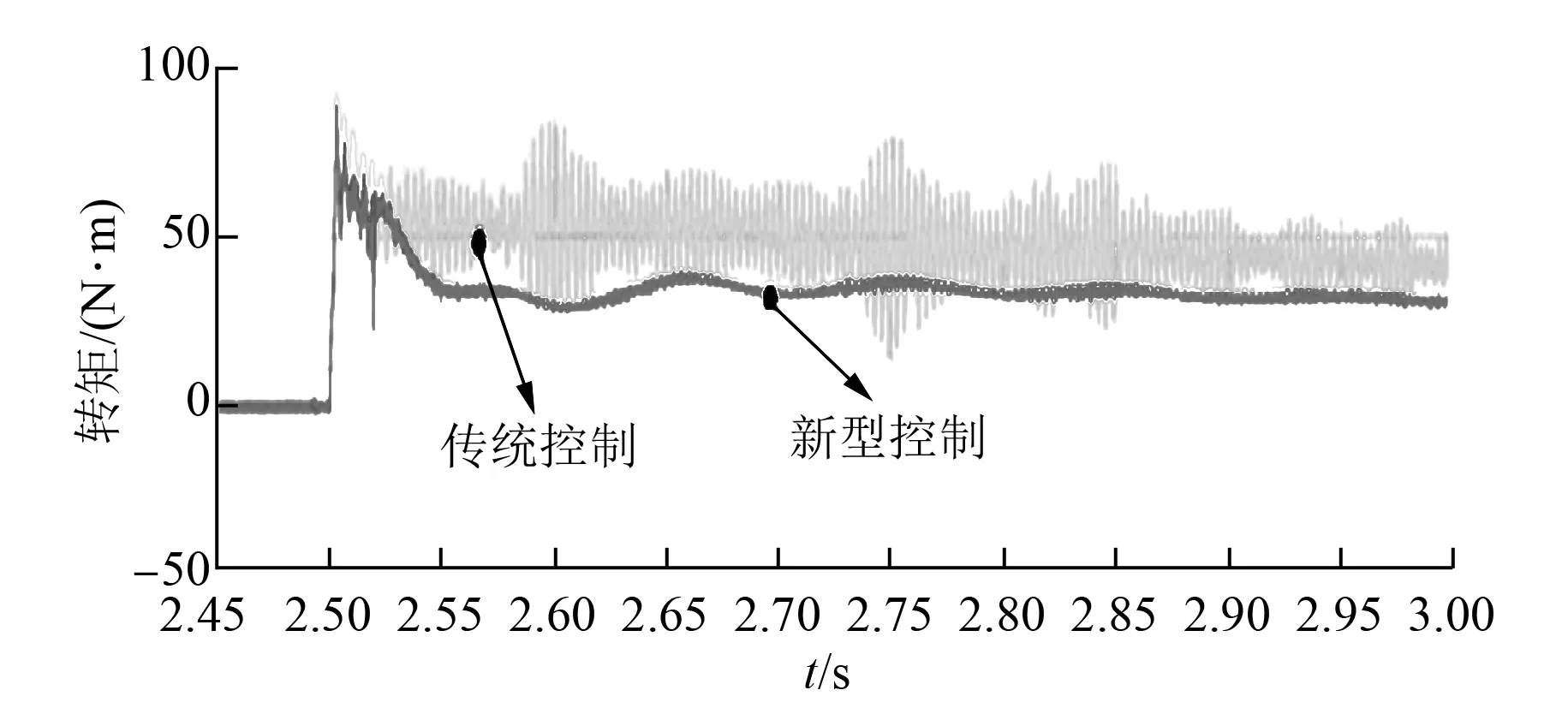
图9 转矩响应仿真波形
4 试验验证
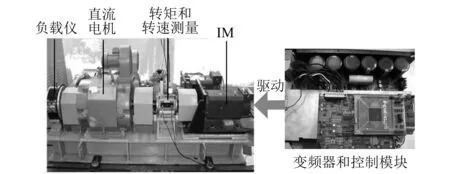
图10 试验平台相关装置
为了验证前述的分析设计过程和新型控制器的实际性能,搭建了IM驱动试验平台,并进行了电机高速运行试验。如图10所示为试验平台构成,主要包括了一台7.5 kW的IM,其最大转速为8 000 r/min,具体的电机参数如表4所示;一台直流电机作为负载电机结合负载仪实现IM的可调负载转矩;一台变频器,其功率模块为三菱公司的IPM(PM75RLA120)模块;一个控制器,其主体是德州仪器公司的定点DSP芯片(TMS320F2812),芯片是算法实现的硬件载体。此外,采样频率设置为20 kHz,开关频率为10 kHz。
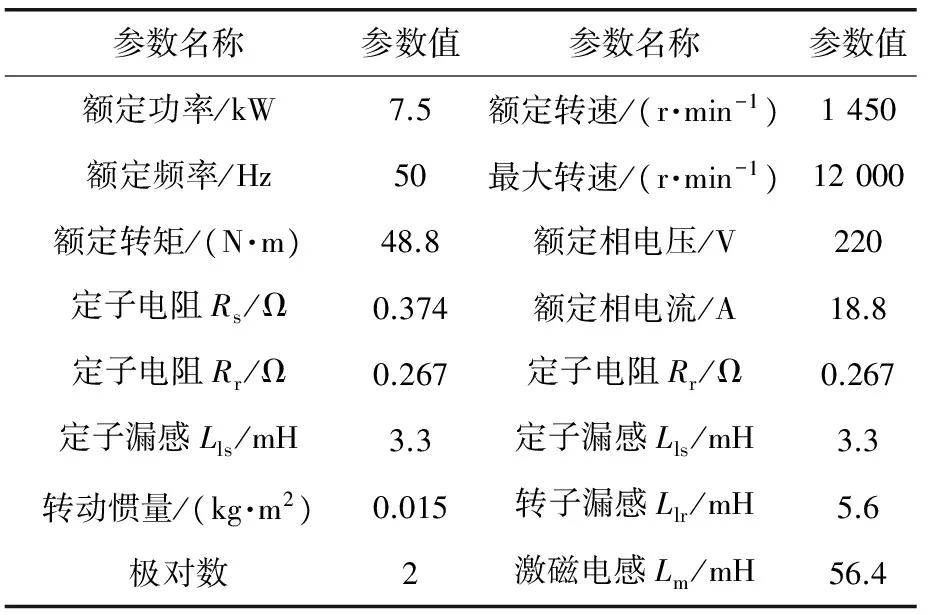
表4 试验电机参数
图11所示为转速从0增加到10 000 r/min时的电机转矩、电机输入相电流和dq轴参考和反馈电流试验波形。从图11中可以看出,在电机高速工况下,电流能够很好地跟踪参考值,几乎没有振荡。
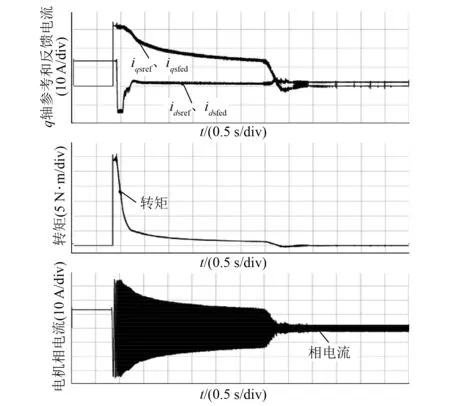
图11 转速从0增加到10 000 r/min时的试验波形
图12所示为新型控制策略作用下,电流阶跃指令(0~31.9 A)、同时转速等于8 000 r/min时的dq轴参考和反馈电流波形,以及对应的转矩响应曲线。从图12中可以看出,dq轴电流能准确跟踪参考,转矩输出平稳。
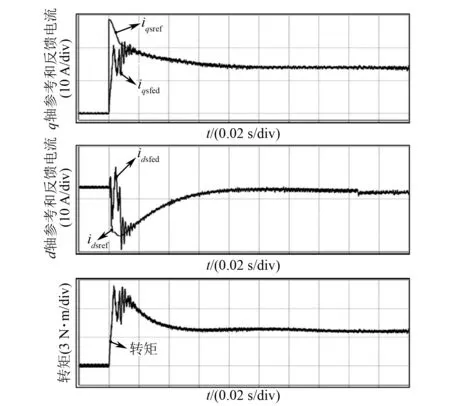
图12 电流阶跃时的电流和转矩试验波形
5 结 语
本文围绕电动汽车IM驱动系统在弱磁区的高速运行问题,提出了一种基于专家控制器的电动汽车IM弱磁区优化控制策略。该方法通过数据库和模糊逻辑推理,能显著改善在较高磁链下的电流控制性能,克服较快的电流参考变化导致的电流振荡和失稳,并有效地降低了数字延迟的影响。同时该新型方案简单易行,非常适用于工程实践。最后通过仿真研究和IM驱动试验,对控制器的性能进行了验证。
[1] 康敏,孔武斌,黄进.电动汽车用五相感应电机容错控制[J].电机与控制学报,2014,18(3): 1-6.
[2] 张兴华,孙振兴,王德明.电动汽车用感应电机直接转矩控制系统的效率最优控制[J].电工技术学报,2013,28(4): 255-260.
[3] 李怀珍,王传军.电动汽车电机及控制器性能测试系统[J].电机与控制应用,2016,43(3): 79-82.
[4] 万山明,陈骁.感应电动机转子磁场定向下的弱磁控制算法[J].中国电机工程学报,2011,31(30): 93-99.
[5] 龙波,曹秉刚,胡庆华,等.电动汽车用感应电机弱磁区电磁转矩最大化控制[J].西安交通大学学报,2009,43(4): 62-65.
[6] 陶华堂,李强.基于矢量控制的感应电机弱磁控制算法研究[J].电气传动,2016,46(3): 7-11.
[7] 杨根胜.一种改进的感应电机查表法弱磁控制策略[J].电机与控制应用,2015,42(2): 26-30.
[8] 陈庆,魏丽君,熊异.基于DSP和弱磁控制算法的纯电动汽车电机控制系统[J].微特电机,2016,44(5): 48-51.
[9] 刘洋,赵金,耿涛.基于间接矢量控制的感应电机高速弱磁区电流控制[J].电工技术学报,2011,26(9): 100-104.
[10] 刘军锋,李叶松.感应电机宽范围调速时电流分配策略研究[J].电力电子技术,2008,42(2): 50-51.
[11] KIM S H, SUL S K. Maximum torque control of an induction machine in the field weakening region[J].IEEE Transactions on Industry Applications,1995,31(4): 787-794.
[12] HARNEFORS L, PIETILAINEN K, GERTMAR L. Torque-maximizing field-weakening control: design, analysis, and parameter selection[J].IEEE Transactions on Industrial Electronics,2001,48(1): 161-168.
[13] GALLEGOS L G, GUNAWAN F S, WALTERS J E. Current control of induction machines in the field-weakened region[J].IEEE Transactions on Industry Applications,2006,43(4): 981-989.
[14] BRIZ F, DEGNER M W, LORENZ R D. Analysis and design of current regulators using complex vectors[J].IEEE Transactions on Industry Applications,2000,36(3): 817-825.
[15] HARNEFORS L, NEE H P. Model-based current control of AC machines using the internal model control method[J].IEEE Transactions on Industry Applications,1998,34(1): 133-141.
[16] 朱洪志,宋文祥,阮智勇,等.感应电机驱动系统的离散域电流调节器分析和设计[J].电气传动,2014,44(7): 3-8.
[17] CASADEI D, MENGONI M, SERRA G, et al. A control scheme with energy saving and DC-link overvoltage rejection for induction motor drives of electric vehicles[J].IEEE Transactions on Industry Applications,2010,46(4): 1436-1446.
[18] 戴文进,徐龙权,张景明.工程电磁场基础与应用[M].北京:清华大学出版社,2008.
InductionMotorOptimizeControlinFieldWeakeningRegionforElectricVehiclesBasedonExpertController*
LIJiarong
(School of Electrical Engineering, Yancheng Institute of Technology, Yancheng 224051, China)
The induction motor drive inverter adopts digital controller and pulse-width modulation, caused the problem of digital delay, and with the parameter perturbation, reduced the control performance of the traditional indirect field oriented control for induction motor in the field weakening region. To solve this problem, an induction motor optimize controller in field weakening region for electric vehicles based on expert controller and fuzzy inference mechanism was proposed. Highly oscillatory or unstable response may occur if current regulators of the traditional indirect field oriented controller did not obtain proper current commands in the weak magnetic area. So the current reference of speed closed-loop output into the first expert controller firstly, then the expert controller changed the current reference based on database and fuzzy inference mechanism, and the fuzzy inference mechanism was realized by the simple Gauss logic function. Finally, a experiment platform for induction motor drive was built, and the high speed motor driving test was carried out. The test results verified the effectiveness of the new control strategy.
electricvehicle;inductionmotor;expertcontroller;fieldweakening;fuzzyinference
国家自然科学基金项目(51507150);江苏省自然科学基金项目(BK20150430);江苏省科技厅项目(BY2016065-30)
李家荣(1970—),女,硕士,副教授,研究方向为电源控制技术和电机驱动控制技术。
TM 346
A
1673-6540(2017)12- 0012- 07
2017 -02 -27
猜你喜欢
能源工程(2020年6期)2021-01-26 00:55:22
山东冶金(2019年3期)2019-07-10 00:54:04
四川冶金(2018年1期)2018-09-25 02:39:26
消费导刊(2018年10期)2018-08-20 02:57:02
通信电源技术(2016年1期)2016-04-16 04:57:26
电源技术(2015年9期)2015-06-05 09:36:06
电测与仪表(2015年20期)2015-04-09 11:53:48
电测与仪表(2015年3期)2015-04-09 11:37:42
电机与控制应用(2015年3期)2015-03-01 03:49:59
China Journal of Accounting Research(2012年4期)2012-04-01 17:32:46
